基于车牌识别的长大隧道交通事件估计方法
2023-10-24王建瑞吴格馨
王建瑞,吴格馨
(1.长安大学 电子与控制工程学院,陕西 西安 710064;2.陕西交通职业技术学院 交通信息学院,陕西 西安 710018)
0 引 言
2001—2017 年国内公路隧道共发生121 起交通事故[1],平均每年发生7 起多事故,事故类型包含追尾、碰撞、撞壁、火灾和翻车等,给人民生命财产安全带来了严重损失。同时隧道内环境相对封闭,发生事故造成的危害较大,如何对突发事件进行检测成为不可忽视的问题[2-3],对保障隧道交通安全意义重大[4]。
在事件检测方面,可以通过采集视频图像,用图像处理技术直接对车辆事故、停车、拥堵、慢行、烟气和火灾进行检测[5-9],但实时视频检测对计算机的性能有较高要求,在长大隧道中布设多个视频摄像头,设备运行成本较高。人工监控系统是传统的隧管站监控管理模式,具有准确性高的优点,但监控员受生理心理因素等影响易产生疲劳[10]。多普勒雷达和常规摄像机联动的方式在照度条件恶劣的情况下仍能识别交通事件[11],但多个监测点之间检测信息的匹配难度大,对车辆难以进行跟踪检测。基于光纤振动技术的交通事件检测方式精度较低,且布设光纤需要开挖路面[12]。
本文利用智能卡口摄像机检测速度快、准确度较高的优势,提出一种综合微观单车事件和宏观交通事件的事件估计方法。通过对卡口检测数据进行实时处理,检测交通事件并进行提示,与常规摄像机联动,为隧道交通安全监控系统提供了智能化支持。
1 项目背景
本项目基于山西省某长大隧道,主要包含卡口数据采集和实时数据处理检测两个部分。与线圈检测器不同,系统采用智能卡口摄像机对经过的车辆信息进行捕获。除了获取基本的流量信息以外,智能卡口摄像机还能获取车型、颜色等信息,最重要的是能够获取车牌号信息,这为后续数据处理工作奠定了基础。系统卡口摄像机的布设示意如图1所示。
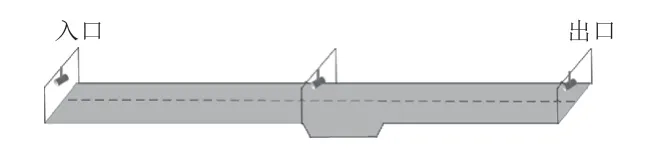
图1 长大隧道卡口摄像机布设位置示意图
长大隧道一般可由接近段、入口段、过渡段、中间段和出口段构成,在这几个分段中,一般而言,接近段的光照条件最好,有利于智能卡口摄像机识别车牌等车辆信息,因而有必要在接近段布设一个卡口摄像机。为了获取车辆驶离隧道的信息,需要在隧道出口段布设一个卡口摄像机。最后在隧道中间段布设一个卡口摄像机,可以对隧道内部上下游交通流变化情况进行基本的分析。
2 交通事件监测方案
交通事件监测包含单车交通事件感知、整体交通拥堵判断和危险品车辆跟踪三个部分,通过设定定时任务,对卡口车辆信息表数据进行处理。
卡口车辆信息表是由智能卡口摄像机采集的信息,主要包含车牌号、车型、抓拍时间和识别卡口号等字段。车辆行驶状态表是隧道中车辆经过各个卡口的时间,主要包含车牌号、车型、各个卡口的抓拍时间等字段信息。车辆事件表为单车交通事件的记录表,有事件类型、车牌号、进入隧道时间等字段信息,其中事件类型有单车超速、单车速度过低和危险品车辆丢失等。交通流信息表包含各时间段内各卡口的累积流量、分路段平均行程时间、分路段密度、分路段分车型空间平均速度等交通流信息。交通事件表记录了交通流拥堵信息,主要包含时间段开始时刻、拥堵路段编号等字段信息。整体交通事件监测信息流如图2 所示。

图2 数据库信息流示意图
2.1 单车交通事件感知
隧道属于封闭道路,正常情况下,经过一定时间,驶入隧道的车辆会从隧道出口段驶出。在隧道内部,车辆不可能凭空产生,也不可能凭空消失,累积输入流量应为累积输出流量和隧道内部交通量的求和。同时,智能卡口摄像机捕获的车辆信息是无方向的,而单洞隧道车辆行驶方向统一,车辆不允许掉头,这为利用智能卡口摄像机识别交通流量提供了可能。如此即可以默认假定,单车在隧道内行驶的过程中,经过下游卡口的时间始终大于经过上游卡口的时间。空间平均速度也应大于等于0,可以根据计算所得单车车速判断车速是否过高或过低,若车速过高或过低则为单车交通异常事件。
利用卡口车辆信息表估计单车交通事件的具体流程如图3 所示。通过设定定时任务,读取最新时间段内的卡口车辆信息表,按照识别卡口号进行分组,若为入口卡口号,则向车辆行驶状态表中插入一条新的记录,否则应按照车牌匹配的原则,更新车辆行驶状态表中对应卡口的时间,再由已知的区间路段长度计算单车区间平均速度,判断车速是否过高或过低,并将异常事件写入车辆事件表。
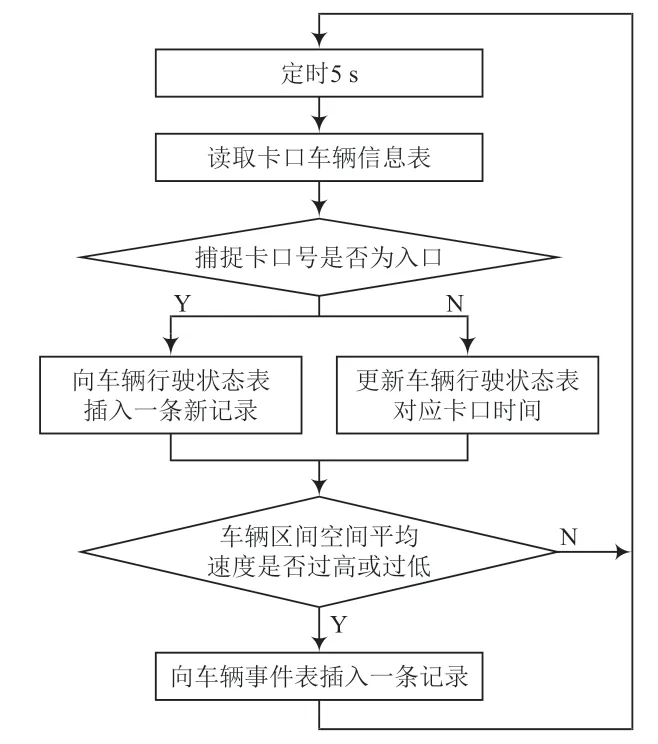
图3 单车交通事件处理流程
2.2 整体交通拥堵判断
由于隧道内道路通行能力是有限的,当交通流量增加到一定程度时,容易发生交通拥堵现象。此时交通流状态直接表现为密度偏大,因而可以将检测密度与拥堵密度指数作比较的方式来判断是否发生交通拥堵。拥堵密度指数可以由最小车头间距推出,而最小车头间距可以由停车视距得到。
设隧道内车辆间的停车视距为Lmin(单位为m),计算公式如下:
式中:v为行车速度(单位为km/h,当车速≥80 km/h 时,取车速值的85%,否则取车速值的90%);ts为制动时间(单位为s);x为最小安全间距(单位为m);l为汽车长度;g为重力加速度(单位为m/s2);φ为轮胎与路面间的纵向附着系数。隧道内道路为沥青路面,φ值取0.38。驾驶员注意力不集中情况下的制动时间取2.5 s。隧道内拥堵状态下的最小安全距离取0 m。行车速度取隧道内最小限速50 km/h。车长按照标准小汽车长度取值4 m。经过单位换算后,Lmin为56.2 m。由式(2)进一步计算出隧道内拥堵密度指数为kmax=17.8 辆/km,当检测得到的计算密度大于此拥堵指数时,则判断有交通拥堵发生。
整体交通拥堵判断的处理流程如图4 所示。由于在隧道中,车辆行驶过程中会出现相互遮挡,或者由于光照不足等原因,卡口摄像机会出现漏检的情况,造成单车路径匹配过程中时间戳的缺失。因而首先从卡口车辆信息表中读取最新时间段内的数据并进行数据插补,提取各个卡口的车辆数据,利用车牌信息进行分区段匹配。进一步周期性地分路段分车型计算交通流流量、密度和空间平均速度。最后将分路段计算密度与拥堵密度指数作比较,若计算密度大于等于拥堵密度指数,则此区间路段为交通拥堵状态,否则交通通畅。

图4 整体交通拥堵判断流程
2.3 危险品车辆跟踪
在各种小类车辆类型中,高危车的危险系数最大,尤其在隧道封闭环境内,给事故救援和疏散带来的挑战更大,需要重点关注高危车在隧道内的行驶进程。具体将各个智能卡口摄像机识别到高危车的信息列为单车交通事件,在隧道入口卡口识别到高危车就添加一条危险品车辆进入事件,其后经过的卡口每识别出就更新交通事件表中高危车的途经时间,若一定时间后,末号智能卡口摄像机仍未识别到高危车,则添加一条危险品车辆丢失事件,为隧管站监控人员提供提示信息。整体数据处理流程与单车交通感知相类似,如图5所示,不同之处重点在于需要及时回查车辆行驶状态表,判断末号卡口是否识别到高危车经过。
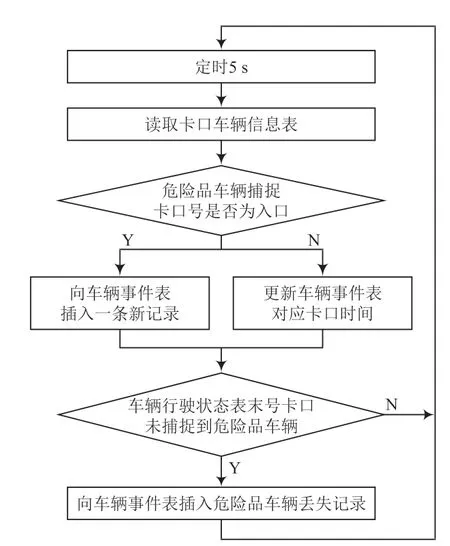
图5 危险品车辆跟踪数据处理流程
3 应用实践
3.1 交通事件监测展示
交通事件监测界面如图6 所示。依托于卡口车辆信息表,界面上方为各个卡口监测到的车辆信息,并进行滚动更新。左下部分为交通流状态表的可视化滚动展示,包含交通流量、分路段空间平均速度等信息。界面右下部分为车辆事件表和交通事件表的滚动展示,可弹窗提示,由隧道监控管理人员进行人工确认异常事件信息。
图6 交通事件监控展示
3.2 危险品车辆跟踪
通过筛选车辆事件表中的危险品车辆丢失事件,图7 对末号卡口没有识别到的高危车进行了展示。每一行为一条高危车记录,按照进入隧道的时间进行倒序排列,可由人工逐条进行处理。对于1 h 以前的漏检信息,可以点击“批量忽略”按钮进行批量忽略操作。除了车牌号,经过各个卡口的时间信息外,还保留了车辆颜色和智能卡口摄像机抓拍的照片,方便工作人员更快捷地查看闭路电视系统,查找对应高危车辆。
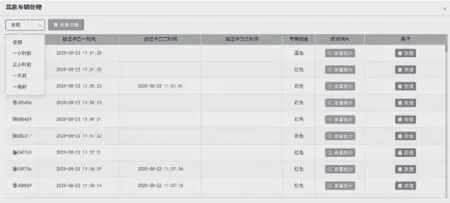
图7 危险品车辆跟踪展示
4 结 语
本文设计的隧道交通事件估计方法能够通过宏观交通流参数和微观车辆行驶状态分别对整体交通拥堵事件和单车车辆事件进行实时检测,通过各个单点卡口智能卡口摄像机的识别信息,计算汇总成隧道区段线路的交通流信息,兼顾了单点和整体交通事件监控的需求。与传统线圈检测和闭路电视监控相比有如下优势:
(1)数据采集设备布设方便,安装时对路面没有侵入,后期维护方便;
(2)可以实时获得隧道内部交通流宏观数据和微观单车数据,并对历史数据进行查询。
因此,本文提出的隧道交通事件估计方法是对隧管站交通监控系统的补充,具有较高的实用价值。
