高速公路货车GPS 轨迹数据异常分析与研究
2023-10-24许天宇韩振峰靳引利
许天宇,韩振峰,张 波,马 静,王 磊,靳引利
(1.长安大学 电子与控制工程学院,陕西 西安 710000;2.陕西交通控股集团有限公司,陕西 西安 710000;3.陕西省高速公路收费中心,陕西 西安 710000)
0 引 言
目前我国对于高速公路数据的管理存在部门分管、难以交互的问题,例如高速收费站数据是保存在收费部门,而GPS 数据是保存在高速运管部门。在研究高速公路货车异常行为时,数据之间的不互通容易导致许多问题。本文以货车的逃费和交通违章这两类问题为例,分析数据不互通在数据分析中所造成的问题。货车的逃费行为包含倒换卡、换挂等,造成了巨大的经济损失;而交通违章行为通常包含强闯ETC、尾随ETC、套牌等,不仅造成了经济损失,更是对高速公路交通安全及人身安全造成了威胁。针对货车逃费行为,已经有许多学者做了相关的研究:通过数据融合、机器学习等方法,能够发现大部分的逃费行为,并且在部分省的高速公路收费站也得到了实际运用[1-6]。实际中为有效管理货车运输的安全,国家通过强制在货车上安装GPS 系统进行监测;虽然GPS 的数据与车辆的原始信息绑定之后能够对倒卡、换卡等逃费行为具有一定的监测作用,但是由于安全监测数据与收费流水数据相互独立且隔离,货车的逃费行为仍旧难以察觉。
针对货车交通违章的现象,目前主要是采用车牌识别、视频检测技术等方法进行处理。这些方法往往时效性低,需要收费站录入数据才能察觉,同时基于图像处理的检测技术,存在计算量过大并且对于较为复杂的情况精度较低等问题[7-9]。
综上可以看出,单独使用GPS 数据或收费站数据进行异常轨迹车辆的分析,效果并不理想。为了提高车辆识别效率和精确度,本文通过GPS 轨迹数据和收费站数据的融合,对货车的高速公路通行数据进行分析和处理,确定货车通行数据中的行为异常点,寻找存在异常行为的货车,进而有助于寻找存在异常轨迹行为的货车。
1 GPS 数据处理
1.1 数据预处理
GPS 设备对驾驶车辆空间轨迹信息进行采集,采集的数据主要包括车牌号码、时间、经度和纬度等信息,但是采集的这些信息不是完全正确可靠的。GPS 数据主要存在数据重复、数据异常和数据缺失的问题。
原始的GPS 数据都存在质量问题,必须经过相应的数据清洗,才能得到有价值和研究意义的数据,同时也方便对数据信息进行进一步的研究和挖掘。因此对于原始数据,需要对其中的异常数据、缺失数据、重复数据进行处理[10-13]。
异常、缺失、重复的数据被清理之后,得到的用于搭建模型的数据项见表1 所列。
1.2 GPS 数据映射
任意两个门架之间,在一定时间段内会具有车辆全部的通行轨迹,将这些GPS 轨迹数据聚类后能够在轨迹中找出所需内容与规律。本文在确定已知标准链路之上,进行GPS 点映射到标准路径上的处理,是将GPS 点按最短距离规则映射到标准路线上。GPS 点到标准路径上的距离分成两部分,其中一部分为GPS 点到子轨迹段的距离;另一部分为GPS 点到连接点的距离。GPS 点到标准路径的最短距离示意图如图1 所示。

图1 GPS 点映射到标准路径上的示意图
图中:Q代表GPS 点,A—B—C—D—E是代表一条标准路径,Qt是BC的垂线,点t是BC与Qt的交点。首先找到前后距离Q最近的两个连接点B点和C点,过点Q作线段BC的垂线,相交于t点,获得最短距离Qt,t点就是Q点的映射点。Q点在标准链路上的映射点有两种情况,第一种映射点是连接点,第二种映射点是过GPS 轨迹点的垂线与连接线段的交点。t点的具体计算步骤如下:
利用点斜式公式计算垂线Qt的方程:
利用两点式方程求取直线BC的方程:
联立式(1)和式(2)建立方程组,求解出t点的坐标,t就是Q点在标准链路A—B—C—D—E上的映射点。
通过以上的数据处理,能够将复杂、不规律的GPS 轨迹映射到标准链路上,并且将折返的重叠轨迹进行平面展开,有助于更好地分析车辆的GPS 轨迹,分析其行为特征。
2 高速公路异常车辆的行为分析
高速公路上存在大量的车辆,其行为与正常在高速公路上行驶的车辆有较大的不同。这些车辆为了完成绕行、换挂、倒卡、换卡等逃费行为,往往需要在高速公路上不断往返,或者在某服务区停留较长的时间,这导致其GPS 轨迹数据与收费站数据往往有一定的区别。通过分析这些车辆的各种行为,能够得到这些车辆的GPS 数据与收费站数据中的异常特征。
2.1 偷逃费车辆的行为分析
随着我国高速公路里程不断扩张,尤其是2020 年取消省界收费站后,货车在高速公路上行驶会产生高额的通行费用,容易出现货车偷逃费行为,一般主要有换挂、倒卡换卡、甩挂甩货等逃费行为[14-15]。这些偷逃费行为都具有一些相似特征,本节主要针对换挂行为进行分析。换挂是指挂车在高速路上联合其他挂车通过交换后挂的方式将货物运送到指定的地点的高速公路车辆行为。换挂逃费是通过缩减系统记录的行程距离,从而实现减少通行费的目的。换挂逃费往往都是具有系统组织的行为,逃费次数多,逃费总额大。分析其折返轨迹特征,具体换挂逃费行为如图2 所示。
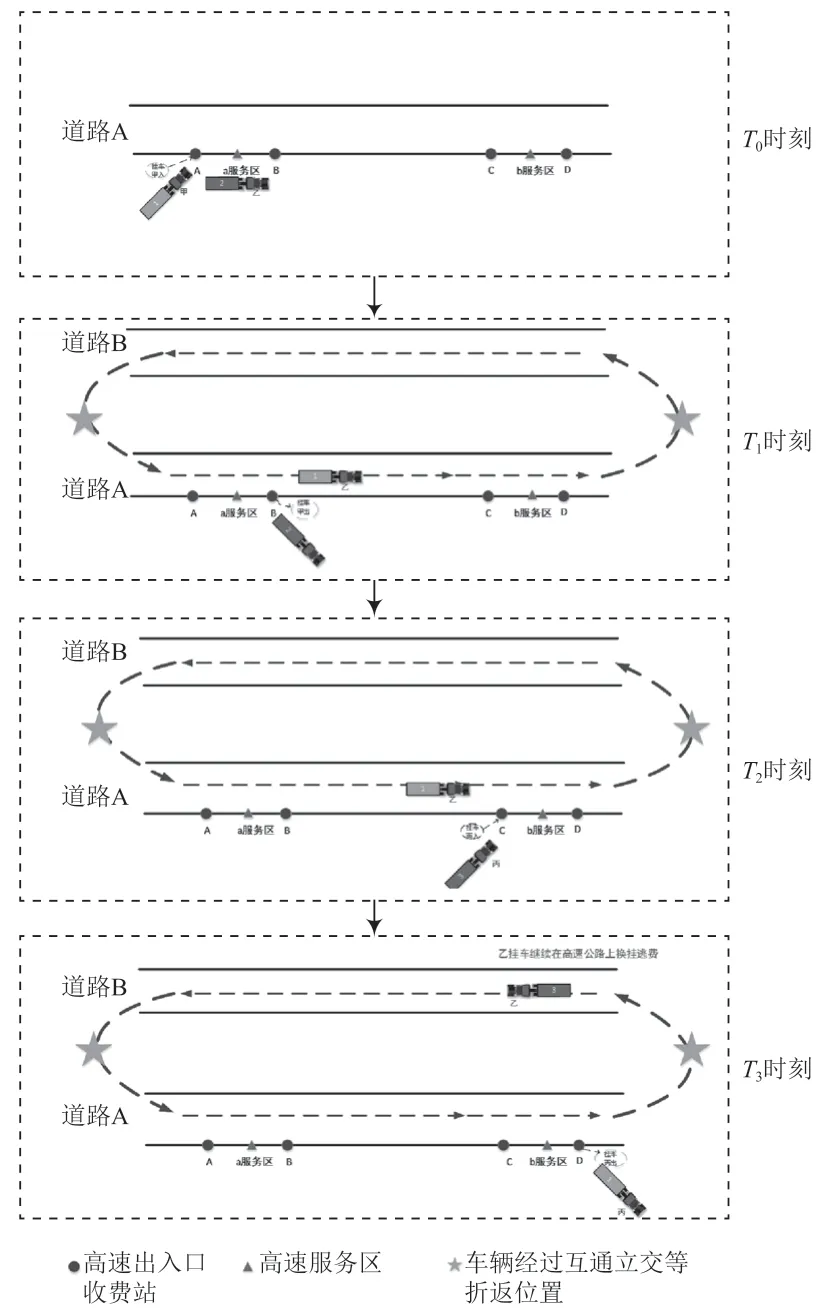
图2 换挂逃费行为示意图
换挂车辆的逃费流程分为四个阶段,分别对应T0时刻、T1时刻、T2时刻和T3时刻(T3>T2>T1>T0)。有3 辆挂车,甲挂车携带1 号挂箱,乙挂车携带2 号挂箱,丙挂车携带3 号挂箱。
第一阶段:在T0时刻,挂车甲携带1 号挂箱,从收费站A 上高速,往前行驶到达a 服务区,挂车乙在a 服务区等待挂车甲。
第二阶段:T1时刻,挂车甲和在此等待的挂车乙交换挂箱。挂车甲携带2 号挂箱在B 收费站下高速,挂车乙携带1 号挂箱向b 服务区行驶。
第三阶段:在T2时刻,挂车丙携带3 号挂箱,从收费站C 上高速公路,向b 服务区行驶。挂车乙和挂车丙在b 服务区相遇并交换彼此的挂箱,之后,他们继续向前行驶。
第四阶段:挂车丙携带挂箱1 行驶到C 收费站下高速,挂车乙携带3 号挂箱在高速公路上继续折返行驶。三辆挂车在高速公路上像这样周而复始进行换挂逃费。
2.2 交通违章车辆的行为分析
在高速公路上,由于部分驾驶员对安全驾驶行为意识淡薄,所以就存在车辆发生交通违章的情况,相应的也会导致这些车辆产生一些较为异常的GPS 行驶轨迹。目前,国内高速较为常见的违法行为主要有违法停车、超速行驶、违规倒车等情况。
违法停车这一行为在高速公路上较为常见,车辆在高速上长时间的逗留会产生极大的危害,许多驾驶员可能会在高速公路匝道口上随意停车上下人,在车辆没有出现故障时就贸然驾驶车辆停到应急车道进行休息或者车辆检查。
车辆的超速行驶,同样也是较为常见的容易引发恶性交通事件的违章行为。超速会影响车辆的操作稳定性,极易发生侧翻或者倾斜;同时当车辆速度过快时,也会导致驾驶人视野变窄,难以有效地处置车辆前方的紧急情况。
车辆的违规倒车虽然并不常见,但所造成的危害也比较重大。有的车辆可能会在高速出口倒车,也存在有的车辆可能因速度太快或者驾驶员注意力不集中等情况而没有及时下站,就可能会在行车道倒车,极易导致后车来不及采取措施而发生交通事故。
3 异常特征分析和轨迹数据模型
根据收费站数据与货车的GPS 轨迹数据,结合第2 节中的分析可得知具有异常GPS 轨迹车辆的轨迹特征;根据异常车辆轨迹的特征能够在异常车辆的GPS 轨迹中找到其GPS轨迹的异常点。
3.1 异常车辆的GPS 轨迹特征
(1)收费数据异常。异常行为车辆的收费数据异常主要分为两类:第一类有入无出,截止当前时刻,在收费中心,只有该异常行为车辆进入高速公路收费站的信息,没有驶离高速公路收费站的信息;第二类是无入无出,截止当前时刻,在收费系统数据中,没有该车辆进出收费站的信息,但是该车辆此刻却在高速公路上行驶;第三类是数据异常,如出现通行卡丢失等情况。
(2)时间异常。第一类异常行为车辆会长时间行驶在高速公路上。与正常行驶的车辆相比,异常行为车辆可能长时间不下高速或根本就不下高速公路,在时间上与正常车辆存在明显的异常。
(3)路径异常。与正常驾驶的标准轨迹不一致,异常行为车辆在其高速公路行驶轨迹中存在局部子路径多次重复的现象。例如:异常行为车辆多次在A点和B点进行折返,它的轨迹中就会出现A点到B点的轨迹重叠现象。
3.2 GPS 轨迹异常点
据3.1 节中异常数据的原则,遍历GPS 轨迹数据和收费站数据,会发现许多路径异常点,其分为折返点与停留点。折返点的主要特征就是具有一定的折返现象,而停留点的特征是某一个GPS 轨迹点保持不动,停留某段较长的时间。
3.2.1 GPS 轨迹折返点
根据第2 节中异常数据的原则,遍历GPS 轨迹数据和收费站数据,会发现许多路径折返点。折返点的主要特征就是具有一定的折返现象。分析出所有GPS 轨迹点中真正的折返点,就可以实现对轨迹划分和折返次数的统计以及判断车辆在空间上的折返轨迹。折返点的判断条件如下:
(1)该点必须能够聚焦到标准高速路线上;
(2)该点与前一个点和后一个点形成的相对夹角必须是锐角;
(3)该点之后的反向点必须在路径上持续一段时间。遍历映射点集合,查找满足条件的点。
对于给定的GPS 轨迹标准链路和GPS 轨迹映射点,折返点的判断主要取决于以下三个变量:
(1)映射点t聚焦到标准高速路线上,给定GPS 轨迹点坐标、标准链路上距离GPS 轨迹点最近的两个连接点,按照最短距离规则,联立式(1)、式(2)得到标准链路上的映射点t的坐标,折返点映射在该标准路径上,从而可以计算重复出现点数的路径,否则,如图3 所示,不在标准高速线路上属于换线,则会造成折射点的统计数量缺失。

图3 映射点换线示意图
(2)如图4 所示,对于给定的折返点A、前一点B和后一点C,相对夹角的阈值θ被定义为:

图4 折返点相对夹角示意图
式中:dis(A,B)和dis(A,C)分别表示折返点到前一个点的距离和折返点到后一个点的距离。本文设定相对夹角的阈值θth=60°。
(3)如图5 所示,对于给定的折返点p1和折返之后的反向点p2,折返后反向点持续距离D被定义为:
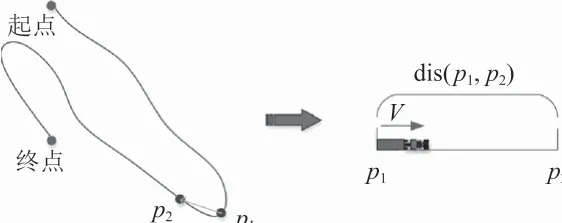
图5 折返后反向行驶示意图
式中dis(p1,p2)表示折返点到折返后反向点的距离。
折返点分布数据见表2 所列,通过大量数据归纳总结特征,当货车发生折返现象后,一般需要在折返路径上行驶一段时间,因为高速上存在许多小范围的折返现象,例如车辆选择走匝道或者上互通立交转换等情况,所以折返距离越长说明折返的可能性越大,本文取置信度为0.05,设定持续距离阈值Dth=5 km。
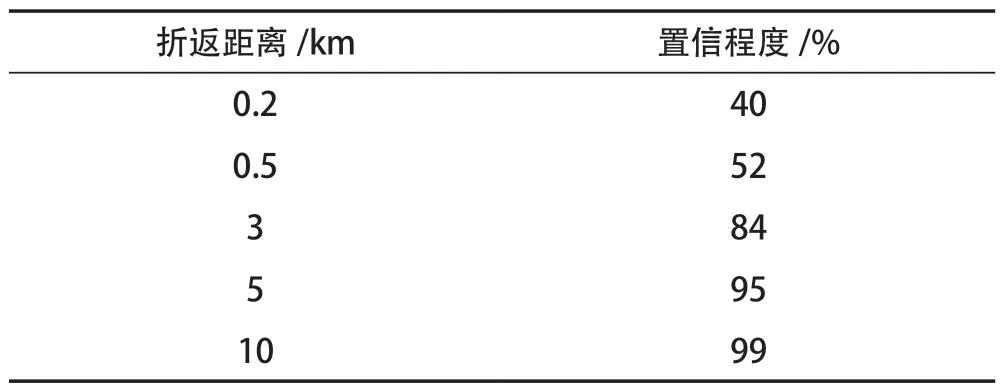
表2 折返点分布数据
在满足映射点聚焦到标准高速路线上的条件后,如果θ≤θth同时满足D≥Dth,其中θth和Dth分别表示θ和D的预设阈值,则认为该轨迹点作为折返点。重复执行遍历轨迹上的各映射点,直到所有轨迹点都被处理完毕,则表明折返点已经全部被检测。
3.2.2 GPS 轨迹停留点
根据2.1 节中的行为分析,结合实际资料,发现货车司机往往不会在收费站长时间停留、过夜等,能够得出货车长时间停留是一种异常行为。本文通过对货车GPS 轨迹数据进行处理,得到了轨迹停留点的整合数据,见表3 所列。取0.01的置信区间,可令停留时长超过6 小时的轨迹点为异常点。
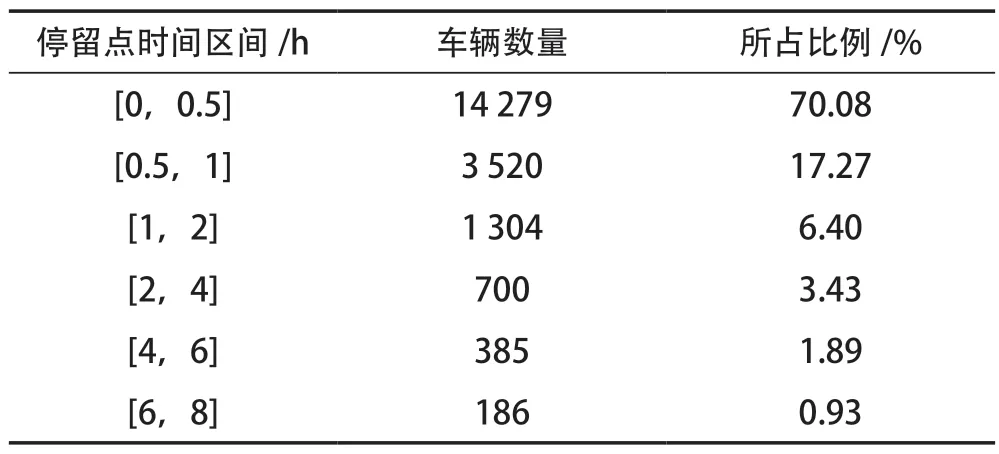
表3 停留点数据
4 实验结果
实验使用1 台搭载Windows 10 系统、CPU 为8 核、显卡为RTX2080Ti、内存16 GB 的计算机。
实验中采用的原始数据为某省2021 年10 月—12 月收费站的收费数据、门架数据和对应车辆的GPS 数据,经过一系列数据预处理后得到了实验待测车辆总共20 374 辆。利用上述识别算法对这些车辆的GPS 轨迹数据进行一一识别,在实验过程中通过对锐角阈值和折返持续时间阈值的调整,发现了具有异常轨迹的车辆。本文以其中一辆为例,分析其行驶过程中的异常轨迹。其GPS 轨迹如图6 所示。
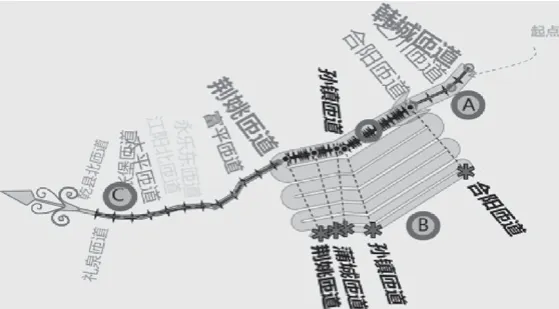
图6 异常车辆的GPS 轨迹
车辆从韩城开往乾县,整个路段划分为A(韩城匝道至合阳匝道)、B(合阳匝道至荆姚匝道)和C(荆姚匝道至乾县匝道)三段。该车辆在B 路段有轨迹重复的现象,将该路段向下“舒展”开,如图6 深色轨迹部分所示。实验结果表明该车辆在B 段往返折叠的轨迹有7 次,具有重大的换挂嫌疑。为了测试算法的有效性,通过实地选取实验车辆进行测试,实验车辆在高速公路上进行来回折返驾驶,通过算法可以准确识别出实验车辆,验证了算法的有效性。
5 结 语
本文研究了货车异常GPS 轨迹数据,对GPS 数据进行清洗处理,同时将GPS 轨迹点数据映射到标准链路上,然后对高速公路异常车辆的行为进行分析,并针对异常特征提出一种识别轨迹异常的检测方法。最后通过实际数据验证了该方法的有效性。从结果中得出,本文所提出的检测算法对于识别异常轨迹车辆有着不错的效果,有助于降低稽查部门工作强度。
