基于Hibbard算法的改进型插值算法
2023-10-24张烁晨
张烁晨
(西安交通大学 陕西 西安 710049)
彩色相机的发展已经有几十年的历史,早期的彩色相机的成像过程是在镜头前加装三原色滤光片,依次拍3张照片,然后合成1张彩色照片。但这种方法具有成像模块体积较大,三色图片难以完全匹配等缺陷,如今只有航空航天等少数领域还在使用这种成像方式。随着成像技术的进步,相机的体积显著缩小,同时为了满足摄像的便携性,也必须采用一次成像的方法得到图像,早期的光学彩色相机已经不适合应用于商业。于是出现了适应一次成像的照相方式,其成像原理类似于生物视网膜,即将三原色的感光单元密布在一张底片上,同时获取3个颜色的信息[1]。一个点的位置只能放入一个感光单元,因此只能记录一个颜色的值。而倘若直接把邻近位置的颜色放在一起,就会产生相差,因此需要通过一定的手段来消除相差[2]。数码相机出现后,出现了数字化的处理方式,即利用计算机对相邻点进行插值处理,以还原像素点内缺失的颜色通道值[3]。随着近年来数码相机的发展,数字化处理设备的普及,人们获取彩色照片的方式越来越便捷,数字化的成像技术已经发展成为了一门成熟的产业,与之相关的软硬件开发层出不穷。
受到缩小成像模块体积与减小成本等因素的限制,当今的彩色相机一般都只有一个感光片。感光片上密布着可以感知光强的小传感器,通过在感光片表面覆盖一张具有特定色彩排列的滤光片(Color Filter Array,CFA)得到原始图像[4]。这样得到的原始图片中,每一个像素点内只能记录一种颜色的光强。这种原始图片其实是一张由三色像素交错构成的矩阵阵列。不同排列格式的CFA如图1所示。
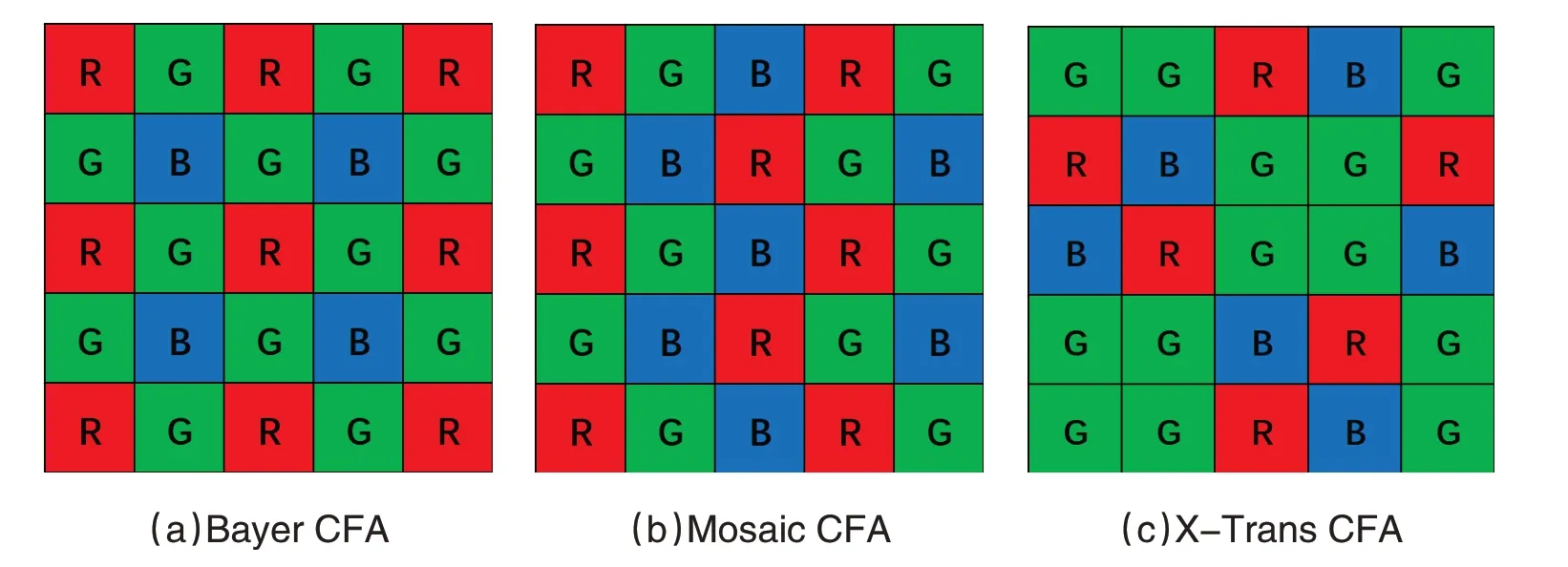
图1 不同的CFA阵列
通过对邻域内包含特定颜色的像素进行插值,进而还原某一像素点内缺失通道的色彩值,这种过程称为去马赛克(Demosaicing)处理[5]。不同CFA 阵列的适合场合不同,在同一场合的表现也各有优劣。如今主流的CFA 采用的是具有Bayer 阵列的滤光片。针对不同阵列的Demosaicing 算法有很多,也不尽相同;基于Bayer阵列的插值算法有双线性插值算法、样条插值算法、Cok算法、Hibbard算法等[6]。
由于Demosaicing 算法的性能直接影响了最终图像的还原效果,因而在硬件条件不变的情况下,研究更优秀的、更适合图片的算法则可以有效地提升成像的质量。现行的算法在遇到色彩值剧烈变化的区域,以及图像的边缘处,普遍会出现不同程度的颜色失真和拉链效应,使图片出现噪点[7]。本文提出了一种基于Hibbard算法的改进型插值算法,对RGB三通道先取对数处理,再进行插值,得到总亮度的修正量,最后对Hibbard算法进行亮度修正。相较于原算法,本文的改进算法对于图像色彩暗淡部分的恢复更加清晰,适用于对不明亮图片的还原,且改进算法的结构较简单,具有一定的应用价值。
1 对数插值算法
传统的Hibbard 算法对G 通道的还原采用梯度判别法,对梯度较小的通道使用线性插值方法。而线性平均应用于某些亮度较小的区域后,边界像素的还原值会被暗色背景拉低,导致很多细节处的亮度偏小[8]。而对数函数在其定义域上斜率很小,能够在一定程度上消除暗色背景对总亮度恢复的影响。如果先取对数再求平均,则边界亮度的还原值将会比线性平均更高,具体情况详见图2。
而在高亮度部分,由于通道颜色值较大,因而在取对数后,均值与原值的差异将不会很显著。
基于Hibbard 算法,对RGB 三通道均进行取对数处理,如式(1)所示:
如果单纯取对数再求平均,此时相当于取几何平均。注意到对数函数在其自变量值过小时反而斜率很大,因此可以预见对暗色部分进行还原时,反而会产生较大的偏差。而通道颜色值的取值范围是0~255,因而这种情况完全有可能发生[9]。所以引入一定的偏移量(本文采取+e3,以确保数据处于平缓区间),再进行插值,如式(2)所示(以行方向为例):
此时对数函数在其定义域上就是相当平缓的,求平均值时可以使两点色彩值的贡献更接近,避免出现阴暗背景干扰边界插值的情况。
Hibbard算法在还原时具有一定色差,这是算法的固有问题[10]。实验结果表明:单独采用对数插值时,Hibbard 算法原有的色差会被一定程度上放大。这说明对数插值虽然在亮度的还原上具有优势,同时也具有放大色差的副作用。
为消除这一副作用,同时保持还原效果,本文采用将对数插值算法和Hibbard 算法相融合的方法。具体思路为:分别采用对数插值和Hibbard算法对图片进行还原,生成两张图像;再用对数插值图片在每一个像素点的总亮度值替换Hibbard 算法对应像素点处的总亮度,得到合成图片的通道色彩值。由于对数插值并未改变Hibbard算法的基本结构,即G通道插值方向的选取,以及R,B通道以G通道为基准进行还原;只是将具体的插值公式进行改变,因而图片在每个像素点仅有亮度与色差的差别,对应的像素点在匹配度上则没有任何差异[11]。因此可以只保留对数插值图片的总亮度值(记为Ω0),而不采用其颜色比例。再用得到的总亮度去修正Hibbard算法对应像素点处的总亮度,同时不会产生像差,如式(3)所示(以G通道为例):
式(3)中,G'(i,j)为合成图片在某一像素点处的绿色通道的值,G(i,j)为Hibbard算法在该点处绿色通道的值,Ω与Ω0分别为Hibbard 算法与对数插值在该点处的总亮度值,总亮度由式(4)计算得到。
这样就得到了颜色比例与Hibbard算法一致,但总亮度值与对数插值算法一致的合成图片。在实际应用时应当注意避免分母Ω过小的情况,即在赋值前须事先规定Ω大于一个小量(如取Ω>1)时才能进行赋值。同时也可以这样理解:当Ω非常小时,说明该区域是近乎没有亮度的,即黑色区域,因而去掉这些无信息的像素点对图像恢复不会产生影响。融合算法既保留了对数插值在亮度还原上的优势,又保留了Hibbard算法在颜色比例的还原上的优势,没有出现色差放大的情况。
2 实验结果与分析
为检测算法的还原程度,本研究采用均方误差(Mean-Square Error,MSE)的方法来评价还原图像与原图的差异水平。如果一张图片规格为M×N,其均方误差的值为SMSE,则SMSE的定义为
其值越大,说明图像与原图的偏离度越大。如果选取待检偏差值为绿色通道的颜色值,此时f[m,n]的定义为:
表示原图像在特定通道的颜色值。而如果选取待检值为总亮度,则f[m,n]即为
f͂[m,n]的定义类似,表示还原图像在该通道的颜色值。
本文选取了10张背景较暗且细节较丰富的图片,分别计算双线性插值算法、Hibbard算法与对数插值算法的总亮度SMSE值,数据具体见表1。

表1 不同算法总亮度的MSE对比
在表1 中未列入融合算法的总SMSE值,因为融合算法正是保证了总亮度和对数插值一致,故二者SMSE相同。可以观察到,对数插值算法在大多数情况下,对亮度的还原效果要显著优于双线性算法。在一些细节较多的图片中,对数插值算法对亮度的还原要明显优于Hibbard 算法,而在一些色彩值变化不显著的地方,也与Hibbard算法的还原结果相近。
为评价算法对图像颜色还原的偏离程度,本文使用R、G、B 三色通道SMSE之和的值来衡量,数据如表2所示。
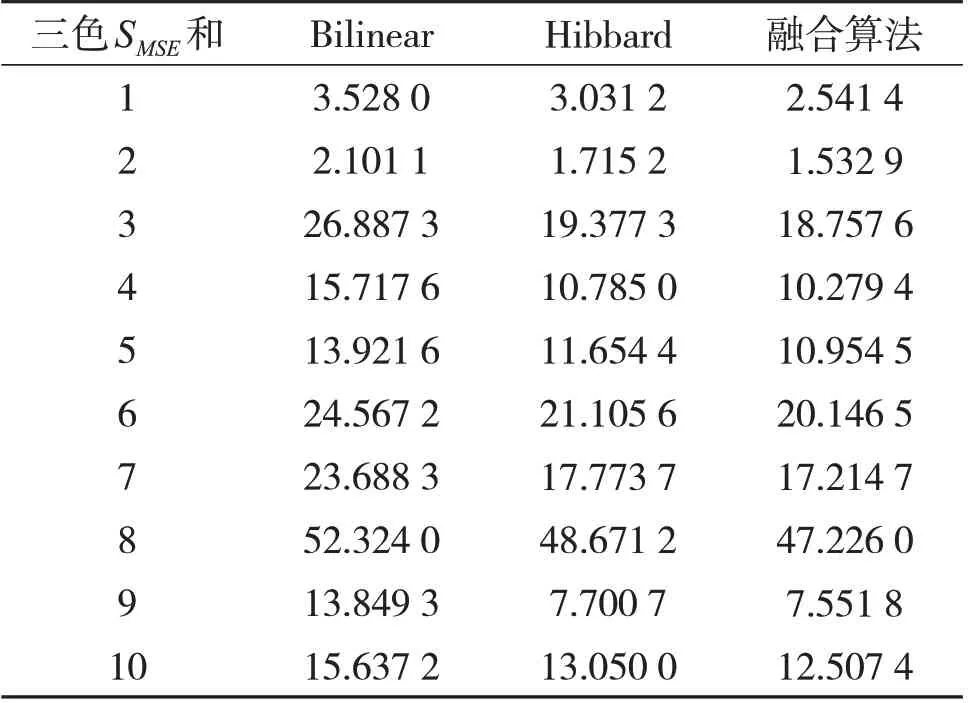
表2 不同算法的三色MSE总和对比
从表2可以观察到,在大多数情况下,融合算法对颜色还原的效果要明显优于Hibbard 算法。这主要是因为Hibbard算法在还原时只采用了线性插值方法,因而损失了一定的亮度值。融合算法在并未改变颜色配比的情况下,SMSE总和的值仍然低于Hibbard 算法,说明Hibbard 算法对图片的还原过程中确实是损失了一定的亮度值的。此次实验还发现,在一些主题为星空的图片中,融合算法普遍能够比Hibbard 算法的MSE值提升10%~20%,主要是因为图片所含的白色小点较多。这些只有几个像素大小的小点的还原,是很多以线性插值为基础的算法的劣势,背景对亮度的拉低作用将会十分明显。而本算法在处理这些细节时有一定的优势,图片所包含的这种点越多,SMSE的提升越明显。本次实验使用的10张图片如图3所示。

图3 本次实验使用的图片
综合表1、表2 可以看出,融合算法对于亮度的恢复效果是比较明显的,可以说同时兼顾了对数插值算法和Hibbard 算法的优势。由于亮度值和对数插值算法一致,因而总体SMSE和对数插值相等;同时颜色的还原比例又与Hibbard算法相同,因而不会放大色差。下面以一张细节较多的星空背景图片为例,放大某一局部,可以对比一些细节的还原结果,具体结果见图4。

图4 本文改进算法与Hibbard算法还原细节的对比
图5(a)是Hibbard算法的还原结果,图5(b)是对数插值算法的还原结果,图5(c)是融合算法的还原结果。对比观察可以发现:对于低亮度部分,对数插值算法在细节处的还原比Hibbard算法更清晰,主要是因为对数插值使得色彩值都向均值中心集中,还原后亮度值相比Hibbard算法要更高,但色差的放大也相当明显,可以看到图片整体发红。而融合算法则无这一缺陷,可以看到融合算法的亮度相较于Hibbard算法有所强化,但同时又保留了原始Hibbard算法的颜色还原比例,因而并未出现色差放大这一副作用。效果上低亮度部分的细节处看起来更亮,观感上更清晰;而在高亮度的局部,本算法的插值结果则和Hibbard算法相近,图像在整体上仍然保持了较好的还原效果,如图5所示。

图5 不同算法对高亮度图片的还原结果对比
3 讨论
在Hibbard算法对图片进行还原时,会产生一定的色差。这是两个因素共同作用的结果:一是由色彩值的剧烈变化所致,这是Hibbard算法在处理大梯度色彩值时的固有缺陷;二是由于基准颜色选取为绿色,对其他两个颜色通道的还原存在一定的误差[12]。大多数算法都不可避免地存在色差,一般而言,算法所使用的插值函数越复杂,就越容易放大色差,因此必须考虑减小色差或者消除额外色差的问题。本算法由于并未改变Hibbard算法的基本结构,于是也存在一定的色差。当单纯采用对数插值时,由于低亮度通道的颜色值得到了强化,因而色差也被一定程度上强化了。例如:很多以绿色为基准颜色的算法,还原图片就容易产生偏暖色的色差,而在进行取对数操作后就看起来会更红。本文采取的将Hibbard算法与对数算法融合后,则兼具了对数插值的高亮度优势和Hibbard 算法的低色差优势,副作用较小。另外,Hibbard 算法在插值时是选取梯度最小的方向进行插值,因而可以避免很多双线性算法容易产生的拉链效应。但是同时也会产生很多额外的噪点,主要是因为单方向的插值不能避开单像素长度的梯度。如果另一个方向的梯度也较大,此时算法就无法分辨,容易绕过边缘插值,从而形成噪点。
4 结语
本文基于Hibbard算法,提出了一种利用对数平均强化亮度的改进型插值算法,对暗色图片的还原效果有所改善。实验结果表明:本算法可以有效提高图片在细节处的还原亮度。然而本算法在颜色比例的还原上依然沿用Hibbard 算法的思路,以绿色为基准色,在单方向上进行插值,因而并不能改善Hibbard算法固有的色差问题。同时本算法对图片高亮度部分的改善效果不明显,不能提高还原结果的清晰度。另外,本算法在恢复的过程中进行了两次插值,分别恢复了亮度和颜色比例,计算开销较大。进一步改进的方向具体有:(1)分析三通道梯度值的大小,选取不同的基准色进行插值,以减小色差;(2)采用更高效的亮度恢复算法,减小计算量。然而算法总是优劣并存,任何算法都既有适用场合,也存在固有缺陷。只要针对不同的场景,合理地选择适用的算法,就可以扬长避短,将恢复效果最优化。
