雨污管道巡检机器人嵌入式系统的设计与实现
2023-10-23孙丙宇
王 帅 , 孙丙宇
(1.安徽建筑大学 电子与信息工程学院, 合肥 230601;2.中国科学院 合肥智能机械研究所, 合肥 230031)
雨污排水管道是重要的基础设施,其安全可靠性对生产和生活的有效开展及其生命和财产的安全保障有着十分重要的影响.据统计,全国地下排水管道总长度在2021年末已有87.2×104km,全国管道总长度每年以8%的速度在增加,同时老旧的地下排水管道也急需翻修和维护,给我国的地下管网运营带来了巨大挑战[1].
目前,我国管道的检测维护仍有60%以上采用传统人工巡检方式,这种方式有着很大的局限性,例如:受维护人员身材影响,无法进入一些管径较小的排水管道;管道内部充斥着大量有毒有害气体,对维护人员身体健康危害极大,导致维护人员不能长时间在管道内工作,巡检距离十分有限;管道内部环境错综复杂,无法准确定位管道内部问题所在位置.因此,需要使用巡检机器人代替传统人工巡检的方式,但目前国内主流CCTV巡检机器人均采用有缆方式进行信号与数据的传输以及给机器人供电,这种方式对于远距离巡检的工况时,由于线缆的长度限制以及管道内部复杂的作业环境,将导致巡检机器人工作不稳定,能耗高,所以具有很大的局限性.同时,有缆方式十分依靠人工控制,需要工作人员操作线缆并根据巡检视频进行检测,这导致整个巡检过程智能化程度低,并且存在人眼观察误差[2].
因此,对于上述问题,本文研究设计一种轮式管道巡检机器人如图1所示.其通过搭载工业摄像头,温湿度传感器,压力传感器,气体检测模块等设备采集数据,将数据通过无线网络传输至上位机后,采用深度学习方式自主判断管道内部是否存在淤积物堵塞问题,从而实现雨污管道的智能巡检.嵌入式系统是雨污管道巡检机器人运动控制、传感器检测以及与上位机之间建立通信的重要平台,也是其实现技术及功能需求的基础.

图1 管道巡检机器人Figure 1 Pipeline Inspection Robot
雨污管道巡检工作对雨污管道巡检机器人提出的技术及功能需求包括:对雨污管道内部进行实时检测,发现有管道堵塞问题时自主记录堵塞照片与位置;实时反馈机器人在管道内的电机运行状态、传感器数据以及视频信息等.本文提出一种采用STM32F429作为主控芯片的高性能检测和实时控制的嵌入式系统实现方法.
1 巡检机器人嵌入式系统方案设计
1.1 嵌入式硬件系统设计
雨污管道巡检机器人主要由6个模块组成:处理器模块、传感器模块、运动控制模块、网络接口模块、视频处理模块以及供电模块,如图2所示.
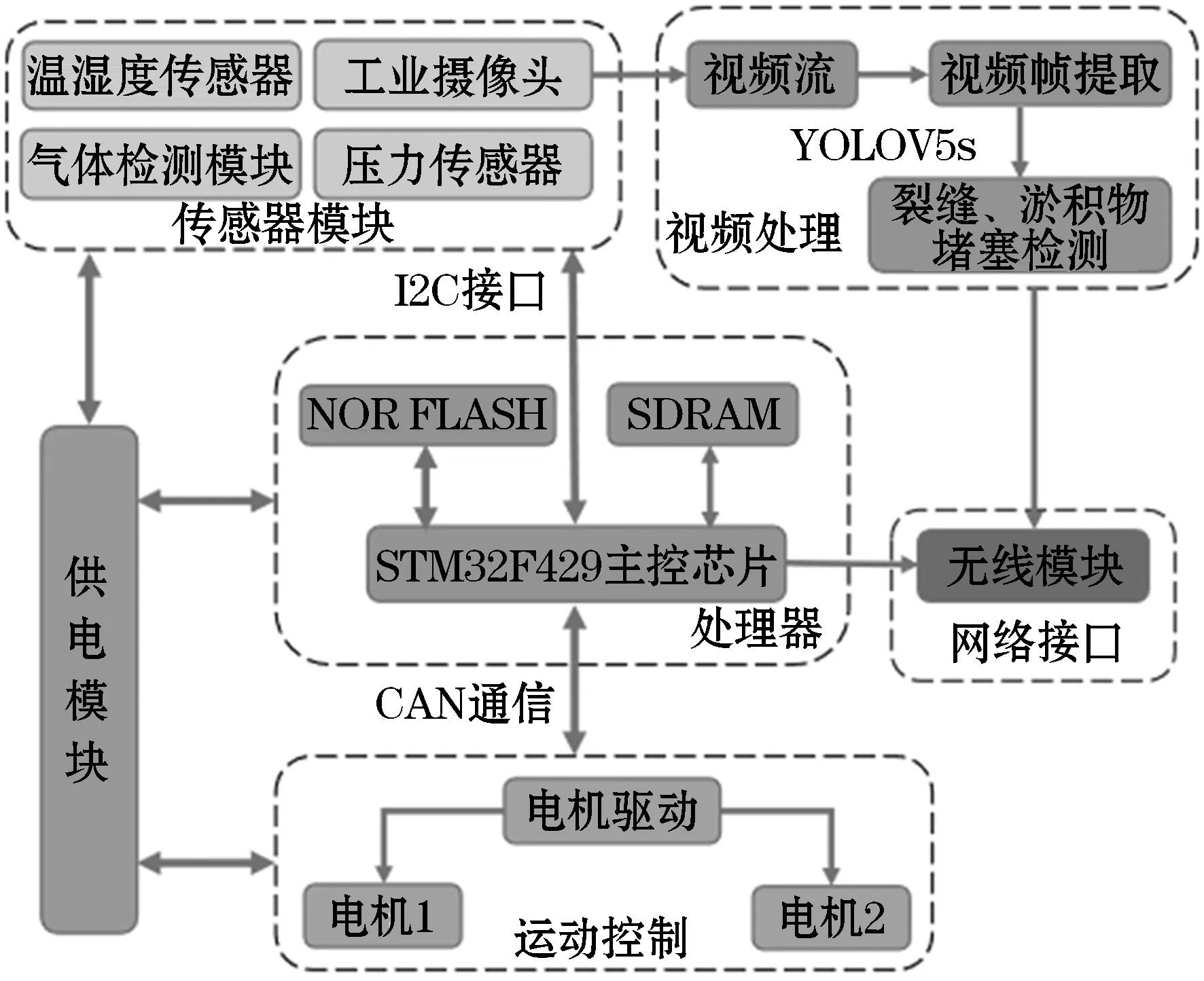
图2 硬件系统框架图Figure 2 Hardware System Framework Diagram
处理器模块由STM32F429主控芯片、NOR FLASH、SDRAM等构成,实现的功能包括传感器数据的处理、视频数据的无线传输、运动控制等.
传感器模块由工业摄像头、温湿度传感器、气体检测传感器、压力传感器构成,其中工业摄像头通过搭载云台360°采集视频数据;气体检测模块可以检测出管道内常见的氨气、硫化氢、二氧化硫、一氧化碳以及甲烷等有害及可燃气体;压力传感器能够实时监测机器人内部气压是否正常,一旦发现机器人内部漏气,气压发生较大变化时,机器人会自主停止工作,从而实现机器人防爆功能.上述传感器完成数据的采集与处理后,通过I2C总线将经过模数转换后得到的数据发送给STM32F429主控芯片.
运动控制模块包括直流无刷电机、电调控制器等,主控芯片通过CAN总线发出指令控制电机的转速和方向,同时电调控制器将电机的运行状态实时反馈给主控芯片.
网络接口模块由LAN8720A通过RMII接口与STM32F429相连构成,负责将采集到的电机运行状态、视频、温湿度、气体以及机器人内部压力等数据传输至上位机进行显示,并接收其下发的控制指令.
视频处理模块通过工业摄像头将采集的雨污管道视频数据经无线模块传输至上位机后,利用YOLOV5s自主判断是否存在淤积物堵塞问题.由于管道内光照条件不足,所以采用红外补光工业摄像头拍摄视频,在检测到雨污管道内部存在淤积物堵塞问题时,会标记管道巡检机器人拍摄视频时所在的位置,并存储该帧图像.
供电模块由24 V锂电池构成,通过PW2312稳压芯片转换后,提供12 V,5 V以及3.3 V电源为系统使用.
1.2 嵌入式软件系统架构
根据典型的嵌入式软件系统开发特点,结合雨污管道巡检实际任务需求,将雨污管道巡检机器人嵌入式软件系统设计成一种层次化的软件架构,如图3所示.
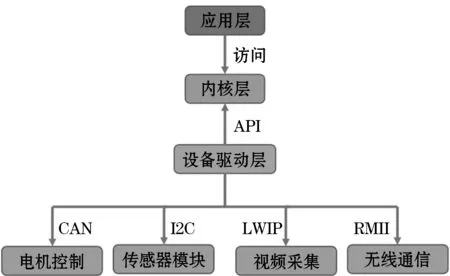
图3 软件系统架构图Figure 3 Software System Architecture Diagram
1)设备驱动层:移植嵌入式实时操作系统FreeRTOS,并在此基础上完成设备驱动软件的设计,主要包括传感器模块数据传输的I2C总线驱动、电机控制的CAN通信、RMII接口驱动以及LWIP协议.设备驱动层的主要作用是为应用层提供硬件设备的功能,其需要实现对设备的初始化、与设备之间的数据读写以及检测和处理设备出现错误等功能.
2)内核层:本嵌入式软件系统的内核采用FreeRTOS操作系统,其高优先级任务可以打断低优先级任务的运行.同时,结合硬件系统资源进行裁剪和移植,有较好的实时性和适用性.
3)应用层:在嵌入式操作系统和设备驱动都已完成的基础上,使用C# Winform系统进行上位机的开发,如图4所示.在巡检管理界面添加巡检任务信息如检测地址、检测时间、管径、管材以及检测方向等信息,之后便可以通过无线通信模块将上位机与巡检机器人进行连接.在控制界面左侧显示任务基本信息,设备信息以及方向与速度控制面板,在主面板上则实时显示拍摄画面以便工作人员进行操作.同时,上位机所挂载的GPS模块能够精准定位井口位置,方便维护人员后期寻找与维护管道.
2 YOLOV5s在巡检机器人中的应用
YOLOV5s网络结构图[3]如图5所示,分为输入端、Backbone、Neck以及Prediction四个部分.输入端包括Mosaic数据增强、自适应锚框计算、自适应图片缩放;Backbone包括Focus结构与CSP结构;Neck包括FPN与PAN结构;Prediction包括回归损失函数GIoU_Loss,其在IoU的基础上,解决了边框界不重合时的问题,公式如下:
(1)
其中:v是衡量长宽比一致性的参数:
(2)
YOLOV5s相较于YOLOV5其他版本有着网络最小,速度最快,更适用于嵌入式系统等特点,但其AP精度也最低.
YOLOV5s模型训练过程如图6所示.步骤如下:首先,建立一个数据库,获取管道内淤积物堵塞的图片;使用labelImg标记工具对这些图片进行标记;然后,为模型设定了适当的深度学习网络参数,从而提高模型的训练效率;最后,设置相应的训练参数,限定合理训练次数,以提高模型对目标物的检测准确率.最终训练结果表明YOLOV5s模型能够实时检测管道内的淤积物堵塞, 且能保证足够的准确率.
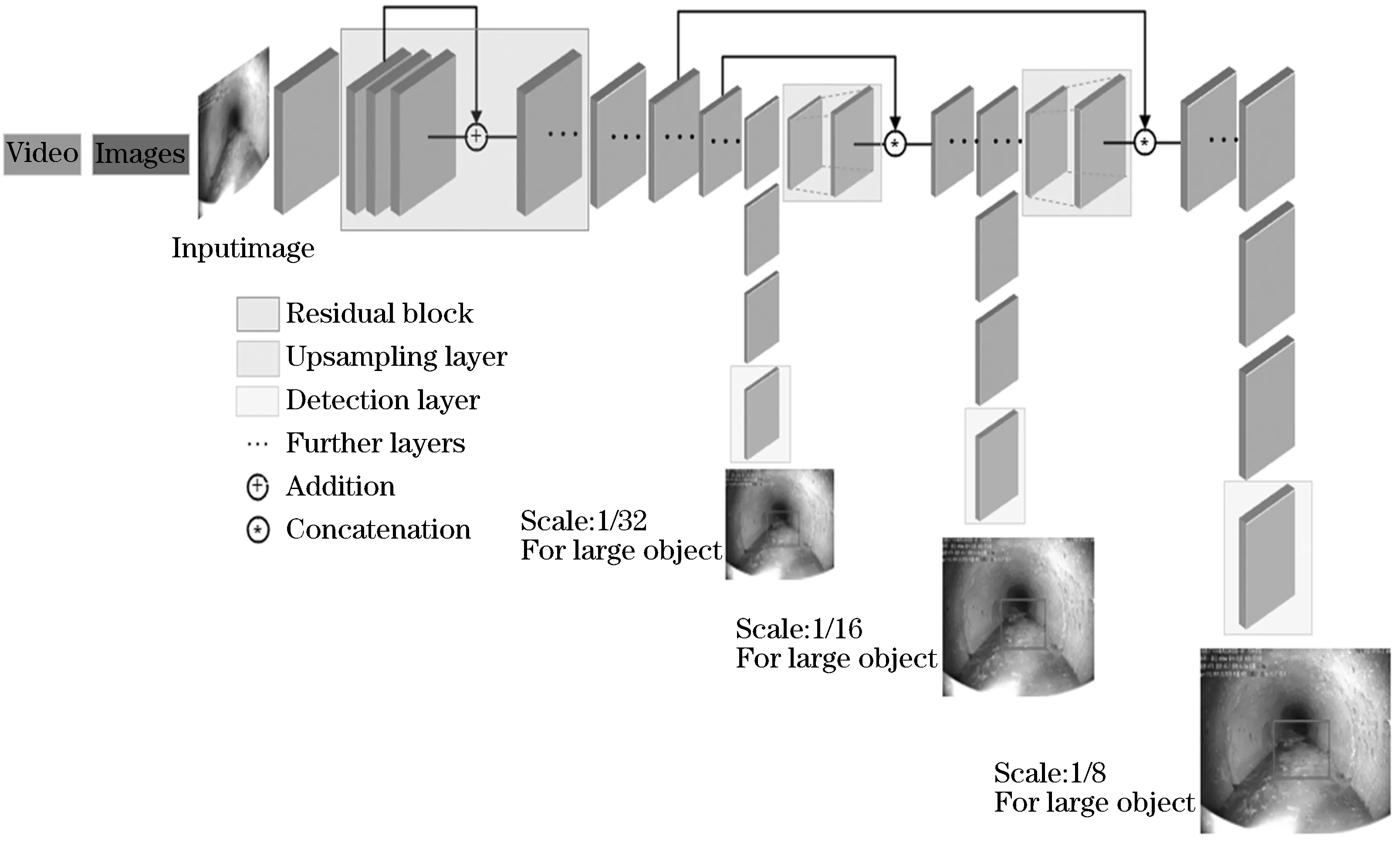
图6 YOLOV5s训练过程Figure 6 YOLOV5s Training process
3 巡检机器人无线通信方案
巡检机器人无线通信示意图如图7所示,通信系统由TL-TR905工业无线路由器以及TL-CPE201无线网桥构成.

图7 无线通信示意图Figure 7 Schematic diagram of wireless communication
TL-TR905工业无线路由器通过TCP/IP协议与STM32F429主控芯片建立Socket通信.其中:通过执行LWIP协议中的socket函数创建一个套接字,之后设置sockaddr_in结构体将STM32F429主控芯片作为Client端,设置为静态IP地址,端口号为8080,最后执行connect函数与Server端进行连接;TL-TR905工业无线路由器设置为Server端,通过socket函数创建一个套接字,之后使用bind函数与socket套接字绑定,然后执行listen函数进行监听,最后执行accept函数阻塞进程等待客户端连接.
TL-CPE201无线网桥与上位机进行连接,采用802.11n MIMO无线通信协议,该通信协议的传输速率最大可达300 Mb/s,室外通信距离最远可达1 km,能够满足数据传输的要求.经多次实际测试,管道巡检机器人的运行速度、通信距离等数据见表1.下面分别计算管道巡检机器人的运行速度和运行路程:
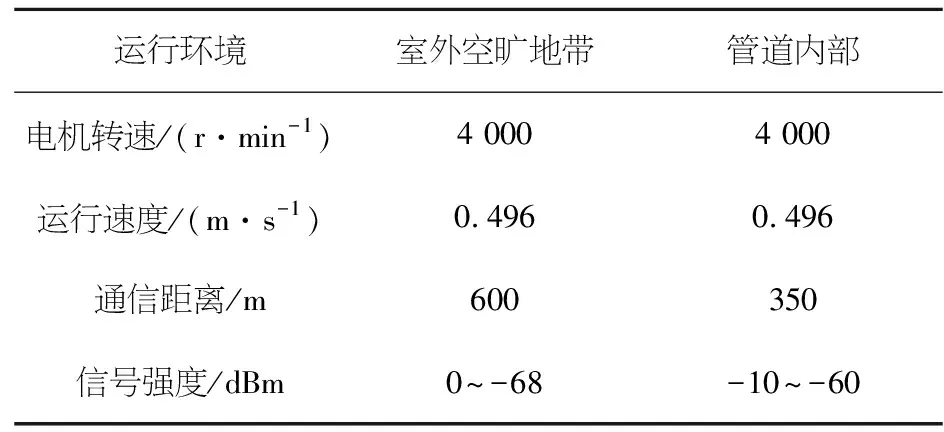
表1 巡检机器人的运行速度与不同环境下的通信距离Table 1 Running speed and communication distance of inspection robots in different environments
(3)
其中:VR为管道巡检机器人的运行速度,m/s;r为驱动电机转速,r/min;D为轮径,mm;C为减速器比例系数.

(4)
其中:S为要计算的路程,m;T为从出发到计算路程时刻的总时间,s;v为所要统计路程内的速度,其为分段函数,每段的间隔是统计时间T0的长度,m/s.
如表1所示,由于雨污管道内部存在积水,障碍物等因素对通信距离产生一定的影响,但所测得平均通信距离350 m也要优于传统有缆巡检机器人的巡检距离,并且使用无线通信的方式能够减少人工操作,提升智能化.
4 现场试验与调试
2022年6月在广州市番禺区进行实地试验,如图8所示.将管道巡检机器人放入雨污排水管道内,启动机器人与上位机建立连接,机器人开始运行并采集数据与拍摄视频,采集到的传感器数据与视频数据会通过无线通信模块传输至上位机.上位机会对数据进行显示,并对拍摄的视频数据进行目标检测,识别是否存在淤积物堵塞问题,将处理后的数据分别存储在相应的文件夹下,以便后期工作人员检查与记录.

图8 现场试验结果Figure 8 Field test results
5 结 语
针对雨污管道巡检方式与功能需求,本文设计了一种基于STM32的嵌入式系统解决方案,实现了集数据采集与处理、数据分析与显示、智能巡检、人机交互为一体的无线管道巡检机器人.实地试验结果表明:1)采用搭载了工业摄像头、温湿度传感器、气体检测模块以及压力传感器的机器人嵌入式系统,既能保证采集到管道内的各种环境数据与管道状况,又能保证机器人进行雨污管道巡检的安全性;2)采用无线通信的方式,摒弃了传统管道巡检机器人的有缆方式,能够有效增加巡检距离,减少人工操作,提升智能化;3)使用YOLOV5s对视频进行处理,智能识别管道内的淤积物堵塞问题,从而代替传统人工巡检,增加雨污管道巡检的安全性与经济性.
