基于图像处理的管翅式换热器翅片尺寸测量方法研究
2023-10-23陈清华余健军王建刚季家东牛天宇
陈清华,余健军,王建刚,季家东,牛天宇
(1.广东立佳实业有限公司,东莞 523000; 2.安徽理工大学环境友好材料与职业健康研究院(芜湖),芜湖 241003;3.安徽理工大学 机械工程学院,淮南 232001)
引言
换热器是一种使热量从热流体传递到冷流体,以满足规定的工艺要求的装置统称[1]。其中管翅式换热器因结构紧凑、节能高效被广泛应用于各工业领域。换热翅片作为管翅式换热器重要换热部件,其厚度和间距大小会对翅片换热效果,流动阻力,翅片效率,粉尘沉积等造成影响[2-5],从而改变换热器换热效率。所以对管翅式换热器翅片相关物理参数进行及时测量显得尤为重要[6]。
目前在制造业领域,机器视觉和图像处理技术的应用简化了制造工艺,提升了制造速率,提高了生产效率[7],在零件加工[8,9],3D打印[10],温度场测量[11],导弹实验[12],汽车制造[13],飞机制造[14]等领域都有广泛应用。但至今为止,将图像处理或机器视觉应用于换热器翅片还比较少,现阶段对于换热器翅片测量大都停留在人工测量阶段,但人工测量费时费力,且容易受到测量人主观因素影响[15],造成较大误差。此外,一些学者也提出了一些其他先进的测量方法,如:李飞,张平,苑玮琦等[16]研究设计了一套基于激光位移传感器的非接触式测量方式,用以测量板式换热器的深度,此测量方法解决了采集数据与处理数据相互干扰的问题,提高了检测速度,但该方法测量结果易受灰尘,铁屑等物质影响,且在测量窄翅片时误差较大;激光干涉技术[17]也是尺寸测量的一种常见方法,该方法测量速度快,精度高,但受环境因素影响大,维护成本较高;J.S.Byun[18]利用光电传感器进行厚度测量,该方法可直接测量翅片厚度,间距,且灵敏度,精度较高,但传感器造价高,且容易受灰尘等覆盖物干扰。
综上所述,以上提到的换热器翅片测量方法具有一定的借鉴意义,但针对性不强,存在一些问题,且没有基于图像分析的无接触测量方法。本文主要基于图像处理技术提出了三种针对换热器翅片测量的测量方法,能有效测量换热器翅片厚度和间距,为日后实现基于机器视觉技术在线检测换热器翅片尺寸打下良好基础。
1 翅片测量要求及原理
图1所示是常见的管翅式换热器翅片图像,可看到其波纹翅片和翅片间隔。本文主要基于图像分析处理技术实现对换热器翅片厚度和间距的尺寸测量。

图1 换热器翅片图像
图2所示是经过一定图像预处理的管翅式换热器翅片厚度、间距尺寸测量示意图。结合该示意图本文提出了基于3种像素尺寸测量方法得出换热器翅片像素尺寸,再利用实际尺寸测量、简易单相机标定换算出翅片厚度、间距等实际物理尺寸的方法。经与游标卡尺测量数据进行比对,计算误差,以检验测量方法的准确性。

图2 换热器翅片尺寸示意图
本文提出的基于图像处理技术的换热器翅片尺寸测量方法的主要算法流程如图3所示。

图3 换热器翅片尺寸测量方法流程图
2 图像获取与预处理
2.1 图像获取
本实验所展示的换热器图片由实验室的CCD相机拍摄获取,如图5(a)所示。在拍摄采集换热器翅片图像时,调整相机高度,使得换热器翅片在图像画面中的占比尽可能大。将换热器放置在CCD相机镜头前背景板上,调整换热器和光源位置,使换热器翅片保持在相机镜头内画面的中间区域,并尽可能清晰。然后保持相机位置,并在相同的背景板上分别放置1 cm和2 cm大棋盘格,棋盘格如图4所示,调整相机到棋盘格的距离,使相机镜头到棋盘格与相机镜头到换热器翅片距离相等,进行拍摄,采集图像。

图4 1 cm×1 cm棋盘格

图5 图像预处理部分结果
2.2 图像预处理
图像预处理是基于图像处理技术尺寸测量的基础,图像预处理结果的好坏将直接影响最终尺寸测量误差的大小。其主要分为以下几个步骤:
1)灰度化。即对图像中的R、G、B值进行重新加权平均。如下式(1)为计算公式:
式中:
R(i,j),G(i,j),B(i,j)—(i,j)处像素点的R、G、B三分量数值。
2)滤波去噪。该步骤主要采用中值滤波,首先利用非线性的方法,取当前像素点及其周围临近像素点的灰度值,将这些灰度值排序,然后将位于中间位置的灰度值作为当前像素点的灰度值。中值滤波作用是去除图像中的孤点噪声。图5(b)是经过图像灰度化和进行中值滤波去噪后的换热器翅片图像。
式中:
median[]—取中值运算;
f(x,y)—(x,y)处像素点的灰度值。
3)图像分割。该步骤是为了将预处理图像中有用的测量部分和不测量部分分割开来,主要利用二值化的方法,将测量部分灰度值转化为255,不需测量部分灰度值转化为0。图像分割结果如图5(c)所示。其主要步骤如下(设一幅图像的像素总数为n,最大灰度值为H):
①选择图像所有像素点中灰度最大值与最小值的平均值作为估计值T0;
②用T0将图像分割为G1和G2两部分,G1由灰度值在范围[0,T0]内的像素组成,G2由灰度值在范围[T0+1,H]内的像素组成。区域G1和G2的灰度均值w1和w2计算公式下:
式中:
i和ni—灰度值i和其对应灰度值的像素个数。
③根据下式计算新阈值:
4)数学形态学处理。数学形态学处理包括膨胀,腐蚀两种处理方式,主要用于解决分割后的换热器翅片图像中翅片区域存在小孔洞的问题。图5(d)是最终预处理后的换热器翅片图像。
假设A和B是z2中的集合,以B为一个结构元,A为膨胀集合,定义如式(6)所示;同理当A为腐蚀集合时,定义如式(7)所示。
3 基于图像分析的翅片测量方法
3.1 像素精度尺寸测量方法
本节提出一种基于像素精度的换热器翅片尺寸测量方法。如图2所示,图片背景黑色部分灰度值为0,翅片白色区域灰度值为255。单个翅片厚度和两翅片间的距离(间距)为测量的主要对象。
本方法具体尺寸的测量步骤如下:翅片厚度:选取上图中的某一片翅片作为测量对象,将图中灰度值为“255”点的像素点的横纵坐标记录,选择像素横坐标最小的点作为基准点,并保持纵坐标不变,从左往右扫描进行像素灰度值判断,从基准点作为1开始累加直至像素点灰度值不符合条件,最终累加值为翅片厚度像素尺寸值。
翅片间距:获取计算厚度时选择的灰度值为“255”的基准点,从基准点开始从右往左对基准点所在行扫描进行像素灰度值判断,记录扫描过程中除基准点外第一个像素灰度值为“255”的点的像素坐标,最后用基准点的横坐标减去该灰度值为“255”的点的横坐标再加上1即为翅片间距像素尺寸。
3.2 亚像素精度尺寸测量方法
上文3.1中说明了一种像素级精度的测量方法,本小节将在小节3.1的基础上提出一种亚像素精度级的测量方法。想实现亚像素精度级测量,依赖于亚像素边缘检测。亚像素边缘检测是在普通的边缘检测基础上发展而来的,不同在于亚像素边缘检测在普通边缘检测检测出的边界上,将单个像素级边缘点周围的灰度值作为补充信息,使得到的物体图像的边缘信息更加精确。普通边缘检测算法多种多样,其中具有比较好信噪比和检测精度的是Canny边缘检测算子,所以本文使用的普通边缘检测方法基于Canny边缘检测算法。我将先使用Canny边缘检测算法提取换热器翅片轮廓。结果如图6(a)所示。
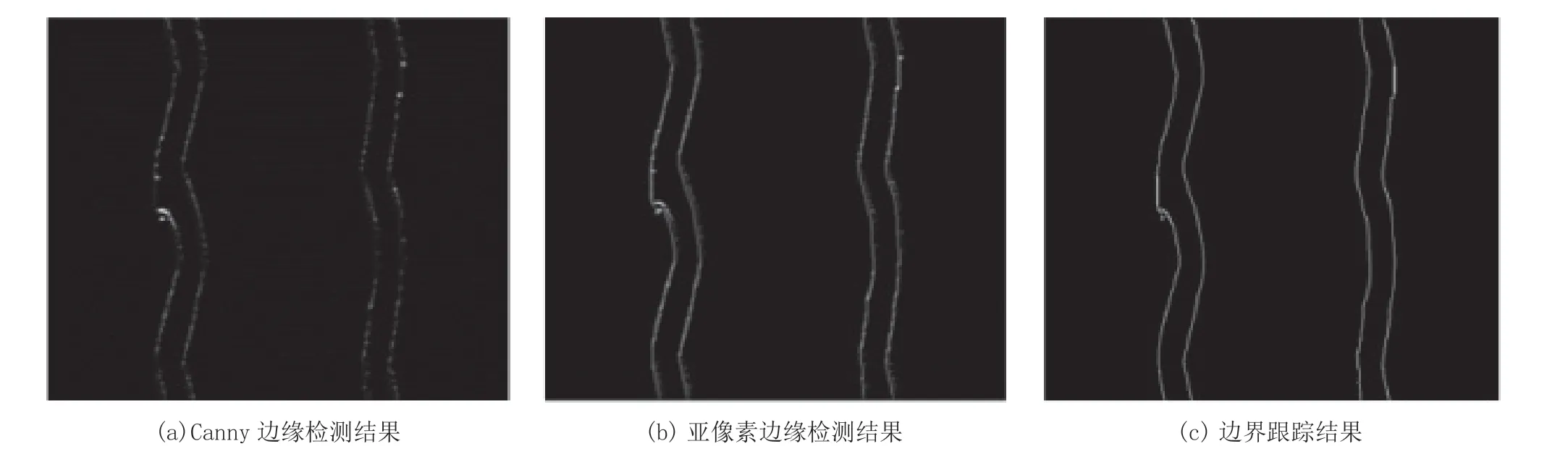
图6 部分边缘检测结果
下面我将使用插值亚像素边缘检测方法,与普通边缘检测算法和其他亚像素边缘检测算法相比,其优点在于计算量较小,计算速度快。其具体原理和步骤为先进行Canny边缘检测,再求原图(x,y)的梯度图像R(x,y),最后得出边缘点的亚像素坐标(X,Y)。
其中,(X,Y)计算方式如式(8)、(9):
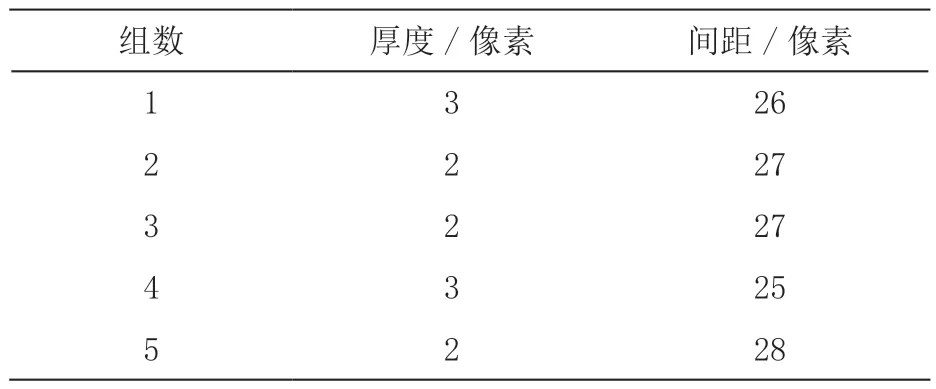
表1 换热器翅片部分测量结果(像素级)
式中:
R(m-1,n),R(m,n),R(m+1,n)—沿梯度图像R(x,y)的x方向上取的三点;
R(m,n-1),R(m,n),R(m,n+1)—沿梯度图像R(x,y)的y方向上取的三点。
如图6(a)、(b)所示,将图像边界进行K-means算法分两类进行聚类,具体操作方式:第一片翅片左边界质心最大值:L1max、最小值:L1min;右边界质心最大值:R1max、最小值:R1min;同理第二片翅片左边界质心最大值:L2max、最小值:L2min,右边界质心最大值:R2max、最小值:R2min。从而可求出换热器翅片的厚度以及间距,具体计算方式如下,表2是亚像素精度尺寸部分测量结果。

表2 换热器翅片部分测量结果(亚像素级)
3.3 图像投影法尺寸测量
在上文提到的两种边缘检测方法结果中,图像仍存在边界不连续现象,本节在上述方法基础上对图像进行边界跟踪,从而可以得到边界更连续的图像。边界跟踪方法原理是:在图像上找一个“起始点”出发,再用跟踪准则检测“起始点”的邻点,将满足跟踪准则的邻点作为新的“起始点”,并重复上述操作,以此可以描绘除图像中物体的边界,图6(c)是边界跟踪的结果。
图像投影法通过对换热器翅片两条边界做竖直方向上的投影,投影可得a、b、c、d四点,如图7所示,所以:翅片厚度=|a-b|,翅片间距=|b-c|。测量结果如表3、表4所示。

表3 换热器翅片尺寸测量结果-边界跟踪

表4 换热器翅片尺寸测量结果-亚像素边缘检测

图7 投影法测量原理示意图
4 测量结果与分析
4.1 实际尺寸测量换算法
在测量的换热器翅片厚度和间距尺寸中,换热器翅片间距较容易人工测量。通过游标卡尺对换热器翅片间距进行测量,选取10组换热器翅片,对其间距各测量5次,记录测量数据,并计算数据均值,该均值可作为换热器翅片的实际物理间距,进而计算出换热器翅片的像素与物理尺寸的比例关系,并通过换算,得出其他所要测量的物理尺寸。测得的50组翅片间距实际物理尺寸大小如表5,求得平均值为5.433 mm。

表5 50组翅片间距测量值
4.2 相机标定法
相机标定步骤如下:首先将1 cm大棋盘格分为10个长6 cm,宽3 cm的小棋盘格,再将2 cm大棋盘格分为8个长为6 cm,宽为4 cm的小棋盘格。接着利用CCD相机拍摄小棋盘格,计算获取的小棋盘格图像像素尺寸并计算均值,再结合小棋盘格实际物理尺寸,计算得到像素尺寸与物理尺寸的比值。通过实验,获取1 cm小棋盘格10个,其像素大小如表6所示,求得平均像素大小为:291.6像素×145.7像素;获取2 cm小棋盘格8个,其像素大小如表7所示,求得平均像素大小为:291.6像素×194.3像素。

表6 1 cm小棋盘格像素尺寸
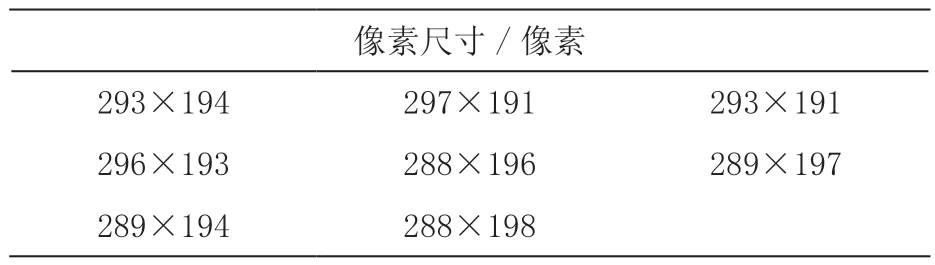
表7 2 cm小棋盘格像素尺寸
分别计算表6、表7中小棋盘格像素尺寸均值和小棋盘格实际物理值的比值,取二者比值的均值作为最终的换算比例值。经过计算得,像素尺寸中的4.852 1像素代表实际尺寸1 mm。
4.3 换算结果分析
表8,表9分别是利用上述两种换算方法经过多次计算得到的结果。其中表8方案1中测量数据是通过游标卡尺多次测量求均值获得的,可作为真实参考值。由此可得表8方案2的结果误差最大,分析原因可知:方案2提出的方法是将翅片边界质心的最大、最小值相减,易受到数值极值的影响,继而影响翅片边界轮廓的确定;表中显示方案3(2) 的结果误差最小,分析原因可知:投影法受极值影响小,因其包含了统计学原理,其结果不会被单个值影响,从而使最终描绘的翅片边界轮廓较为准确。另外,根据表8和表9中数据显示,通过亚像素边缘检测方法测量出的尺寸误差最小,进一步提高了测量精度。

表8 尺寸换算结果1

表9 尺寸换算结果2
由上述三种测量方法可知,结合实际尺寸测量换算法和简易单相机标定法两种换算法,三种测量方法的结果较为接近,在多次测量求平均值作为间距实际尺寸和以出厂参数作为翅片厚度实际值的对比参考下,测量值均可将误差控制得较小。
同时该实验也有可改进之处,比如在用 相机拍摄图像时,要做到相机镜头与翅片和棋盘标定靶的距离相等,这个距离测量存在一定误差,对测量结果产生影响;此外实验所用相机为普通CCD相机,若换成专业的工业相机,测量精度也将提高。
5 结语
本文提出了基于图像处理技术适用于测量换热器翅片的三种方法,测量结果表明,三种方法的测量误差均在5.00 %左右,最小误差低至1.20 %,所以本文提出的测量方法是合理的,具有一定意义和实用价值。但同时因受实验设备性能的影响,实验误差在所难免,如若换成专业工业相机进行拍摄实验,测量结果将会更加精确。
综上,本文提出基于图像处理技术测量换热器翅片的方法是可行的,后期可搭配硬件设施进行软硬件联合实验。除此之外,本文提出的测量方法还可以从测量计算速度方面进行改进,以适应未来投入实际生产测量当中,确保其实时性。
