一种基于无人机蜂群的目标跟踪算法
2023-10-22纪冰辉王若楠
纪冰辉,王若楠,周 陬
(桂林电子科技大学 信息与通信学院,广西 桂林 541004)
21世纪以来,随着小型无人机低成本化、小型化的发展,研究人员提出了“蜂群”“编组”等基于无人机群的新型作战概念[1],采用多个携带信号接收机的分布式无人机基站协同构建蜂群侦查定位系统成为必然趋势。基于无人机群的定位系统适合于多目标动态定位场景,在电子对抗、灾难救援场景中得到广泛应用。但在多机协同动目标感知场景中,由于目标的机动特性,导致必须增加跟踪算法模块,以提高定位系统的动目标定位性能。机动目标跟踪作为一种典型的非线性滤波过程,在信息融合和实时状态估计领域[2]引起了广泛关注,将机动目标跟踪技术引入蜂群定位平台可对运动多目标进行实时的状态估计,为机动目标跟踪定位提供一种解决思路。
对机动目标进行准确跟踪的关键在于选择合适的非线性滤波器及跟踪模型的优化设计[3]。本研究面向常用的利用多站时差定位技术对目标进行跟踪定位,并对其下一时刻的状态进行预测估计。由于其定位方程的非线性特性,须采用非线性滤波器。常用的非线性滤波方式主要包括扩展卡尔曼滤波(extended Kalman filter,简称EKF)[4]、无迹卡尔曼滤波(unscented Kalman filter,简称UKF)[5]、粒子滤波(particle filter,简称PF)[6]等。其中,EKF 与UKF是在线性滤波器-卡尔曼滤波器的基础上对非线性问题进行扩展而得到的。EKF算法利用泰勒级数展开法将非线性函数线性化,然后利用卡尔曼滤波原理近似计算系统的状态估计值。尽管EKF不是最精确的“最优”滤波器,但因其相对简单且易于操作,在工程中应用最为广泛。UKF利用非线性模型产生包含均值、协方差等统计信息的确定点集,使用近似的概率分布避免了雅克比矩阵的求解问题,复杂度降低,但鲁棒性较差,计算成本高[7]。与UKF相似,PF利用粒子对统计模型中的概率分布函数进行模拟,在非高斯分布场景中适应性较强,但同时存在粒子退化[8]、计算复杂度高、实时性能差[9]等问题。
因此,从实际应用方面考虑,通过非线性滤波器EKF处理时差定位跟踪问题。文献[10-11]假设目标在理想运动状态情况下,即目标始终保持匀速直线运动的场景中,使用EKF对运动目标进行跟踪,跟踪效果较优。但由于仅使用匀速直线运动模型来匹配目标运动状态,难以适应强机动性目标。因此,需要对跟踪模型进行优化,引入多模型对运动轨迹进行匹配。1988年,Blom 等[12]提出的交互式多模型算法(interacting multiple model,简称IMM)为跟踪模型扩展提供了新的解决方案。但由于其马尔可夫概率转移矩阵参数固定,模型切换过程需要通过时间迭代来实现,造成模型切换滞后[13],切换过程的时间代价较高,模型匹配性能有所下降。
为了解决模型切换时效问题,文献[14-16]引入误差压缩率,基于后验信息进行修正,对转移矩阵进行更新优化,概率模型向匹配模型靠拢,匹配模型转移概率增大,从而实现快速切换。臧荣春等[14]利用误差压缩率自适应调节模型转移矩阵,增大匹配模型转移概率,并提出了相应的马尔可夫参数自适应IFIMM(adaptive Markov parameter innovation filtering interacting multiple model,简称AMP-IFIMM)算法,但该文献仅对双模型系统适用性进行了讨论。封普文等[15]在文献[14]基础上对误差压缩率表达式进行简化,并依据其更新信息对转移概率矩阵进行在线更新,提出了一种自适应更新优化概率转移矩阵的跟踪(adaptive Markov parameter interacting multiple model,简称AMP-IMM)算法,对多模型系统仍然适用,解决了原算法只能交互2个运动模型的问题。戴定成等[16]在文献[14]的基础上进行进一步改进,对多模型系统进一步扩展,并对其适用范围进行讨论,但对于双模型,其切换效果与文献[14]一致。
因此,将非线性滤波器与交互式多模型结合,同时考虑非线性滤波器和跟踪模型的适应度问题,为机动目标跟踪面临的模型单一、与真实运动模型不匹配问题提供了新的解决思路。首先,针对蜂群场景建立相应的三维目标跟踪模型和基于距离差信息的时差定位观测模型。其次,考虑到单一运动模型的局限性,引入IMM 算法对运动模型进行扩展。为了提高模型切换效率,将扩展卡尔曼滤波算法和改进的交互式多模型算法相结合,提出基于扩展卡尔曼滤波的马尔科夫修正的交互式多模型跟踪(AMP-IMM-EKF)算法,并与定位选站算法相结合应用于时差定位系统中,以便更好地对目标进行定位跟踪。最后,通过仿真分析滤波算法对动目标定位性能的改善作用,并对算法有效性进行验证。
1 数学建模
1.1 目标状态模型
目标运动模型是实现精准跟踪的重要条件,是跟踪滤波算法的基础,因此目标跟踪的首要任务是建立合理、准确的目标运动模型,以便精准预测目标的运动轨迹。考虑到辐射源的运动状态,为了解决单一运动模型造成的跟踪轨迹偏差较大的问题,以匀速直线运动(straight line motion with constant velocity,简称CV)和匀加速直线运动(linear motion with constant acceleration,简称CA)两种模型为例,对辐射源运动过程进行建模。
1.2 观测模型
基于状态空间方法的观测模型状态方程描述为
其中:观测噪声nk为白噪声信号,服从零均值高斯分布;方差为Rk;B(Xk)为响应矩阵,由距离差序列构成,表达式为
2 AMP-IMM-EKF目标跟踪算法
实际应用中,机动目标的运动不可能仅服从单一运动模型,仅采用某一固定运动模型难以对运动目标轨迹进行准确跟踪,由Blom 等[12]提出的交互式多模型(IMM)算法提供了一种解决思路。IMM 算法的主体思想是融合不同模型的估计结果来得到最终的估计结果[17],即首先添加多个可能出现的目标模型所对应的模型滤波器,然后在任意跟踪时刻,通过实时检测计算每个滤波器的权重系数以及模型更新概率,最后通过加权计算将估计状态融合,得到当前时刻的最优估计,从而达到模型自适应跟踪的目的。由于估计结果是通过对每个可能模型的估计值加权得到的,跟踪性能优于任意单个模型[18]。
2.1 改进IMM 算法
传统IMM 算法[19]利用先验知识对马尔可夫概率转移矩阵进行固定设置,不能快速有效地进行模型之间的相互切换,文献[14]提出了利用误差压缩率矩阵对转移矩阵进行自适应改进的方案,从而将无人机蜂群看作复杂的自适应系统[20]。
误差压缩率是输入交互偏差与输出交互偏差之比:
而对于双模型系统,模型误差压缩率可表示为
文献[15]通过自适应调节模型转移概率对式(7)、(8)进一步改进,从而获得修正后的双模型误差压缩率:
将马尔可夫参数自适应思想由双模进行推广,可得多模型系统中误差压缩率的一般性表达式:
因此,修正后的概率可表达为
概率转移矩阵为
文献[15]指出,当模型1更匹配时,模型置信度u1>u2,则λ1/λ2<1。
而后通过式 (9)~(13)可以对模型转移概率进行自适应调节。因为=λ1P12/λ2<P12,而P11+P12=1,表明其向匹配模型转移的概率正在不断增加。
2.2 AMP-IMM-EKF目标跟踪算法步骤
以IMM 算法为基础,利用在线更新马尔可夫概率转移矩阵的方法,结合扩展卡尔曼滤波算法,提出基于扩展卡尔曼滤波的马尔科夫修正的交互式多模型跟踪算法,并将其应用于多站无源时差定位系统,结合定位选站算法,讨论所提算法的跟踪性能。改进后的AMP-IMM-EKF算法框图如图1所示。
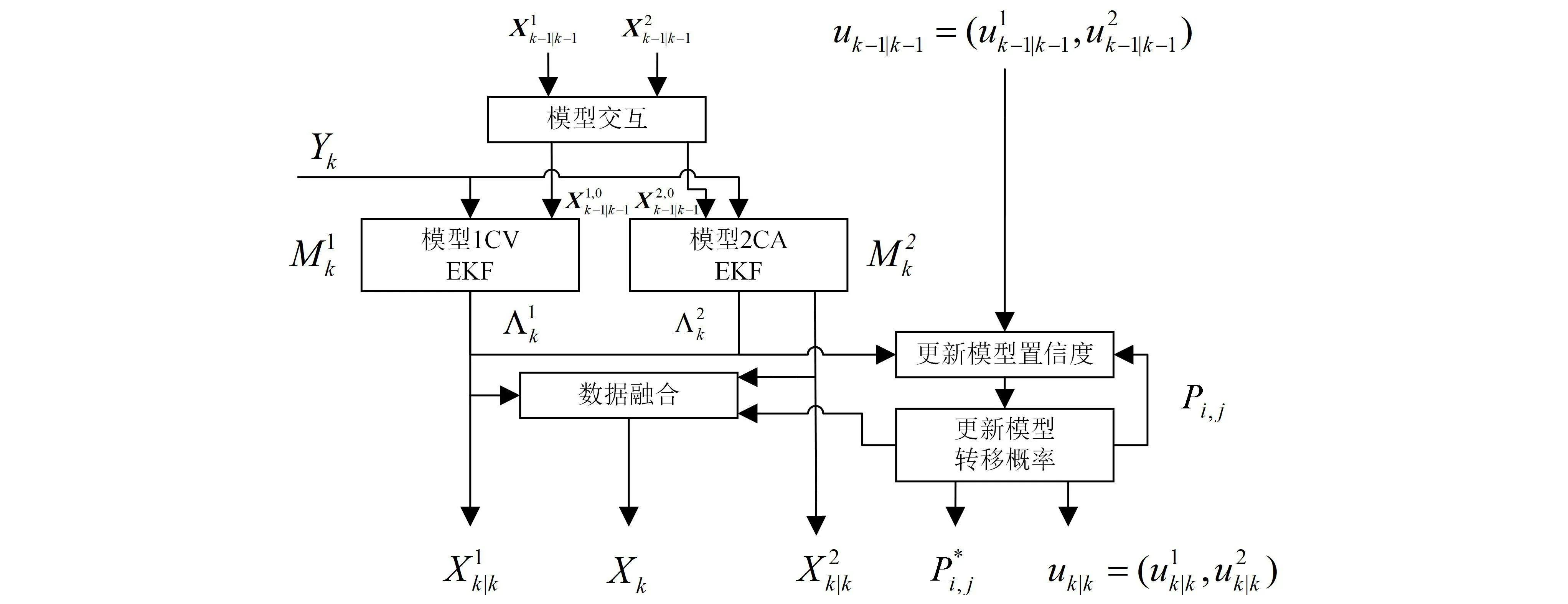
图1 AMP-IMM-EKF算法框图
如图1所示:为卡尔曼滤波器模型;为k时刻进行交互后的状态估计值;Xk为目标在k时刻的真实状态;Yk为目标在k时刻的观测值;Pi,j为由模型i向模型j转移的概率;uk|k为模型混合概率。
将k-1时刻的模型状态估计与k时刻的目标观测值带入CV与CA模型,并经过扩展卡尔曼滤波器滤波,从而获得k时刻的状态估计值。同时,更新不同模型置信度并计算混合概率,而后将其与已有数据进行融合,最终获得目标在k时刻的真实状态。
算法参数定义如下:
1)IMM 模型含有r个卡尔曼滤波器模型,其中,k为离散的时间序列,j=1,2,…,r,代表第j个滤波模型;
2)在k时刻,目标观测值为Yk;
3)模型之间存在相关关系,其过渡概率为
4)滤波模型对目标运动状态描述的准确度,即模型置信度,又称为匹配概率,可表示为
步骤1:输入模型交互。将目标真实运动轨迹与选站算法的定位结果分别作为真实值与观测值,输入IMM 模型中。
首先将k-1时刻的模型状态最优估计进行初始化,并与系统多模型进行关联,交互后的状态估计值为
然后通过交互后状态与模型混合概率对模型的估计协方差进行求解:
步骤2:滤波器滤波。滤波器模型选择扩展卡尔曼滤波器,观测模型选用式(3),结合选站算法进行相应调整:
其中,响应矩阵由原来的固定数值矩阵转变为依赖选站输出时变的矩阵,计算式为
更新矩阵计算
步骤3:置信度更新。IMM 算法根据目标运动状态与现有的运动模型进行匹配,利用极大似然法分配模型权重,对运动模型进行选择更新,即置信度更新。k时刻模型置信度函数为
步骤4:模型转移概率更新。该部分参照式 (9)~(13)进行计算。
步骤5:数据融合。该部分与传统IMM 算法一致,更新后的数据进行新的数据融合,根据置信度值对来自不同模型的计算结果进行修正,输出k时刻的目标总体估计值,并作为下一时刻的输入,不断进行循环滤波,从而对目标整个运动过程进行跟踪。
目标总体估计值:
3 算法仿真与性能分析
3.1 AMP-IMM-EKF算法仿真
目标运动轨迹采用三维坐标设置,运动状态包括CV、CA两种运动模型,为了验证AMP-IMM 算法模型切换的性能,使用双模型设置了5次模型切换过程。0~20、40~60、80~100 s目标分别选用加速度为8、4、4 m/s2的匀加速直线运动,20~40、60~80 s目标分别选用速度为10、5 m/s的匀速直线运动,规划出的真实目标运动轨迹如图2所示。使用60架双层立方体结构的无人机群对目标进行跟踪定位,定位次数设置为10次,无人机丢失率为8%,迭代次数为300次,时差测量误差采用高斯信号,标准差为10 ns,无人机群运动速度为30 m/s。目标跟踪时长为100 s,测量周期为1 s。
从图2可见,若仅采用定位算法,定位误差较大,而AMP-IMM-EKF跟踪作为定位算法的补充,对动目标进一步减小了跟踪误差,算法误差由50 m 降至25 m 以内。图3为在不同平面的跟踪误差,可以看到单方向跟踪误差减小至5 m 以内。图4给出了AMP-IMM-EKF跟踪算法的模型切换过程,可以看到模型匹配概率,即模型置信度在5 s内即可完成切换,且匹配后的模型与真实模型能够正确对应。
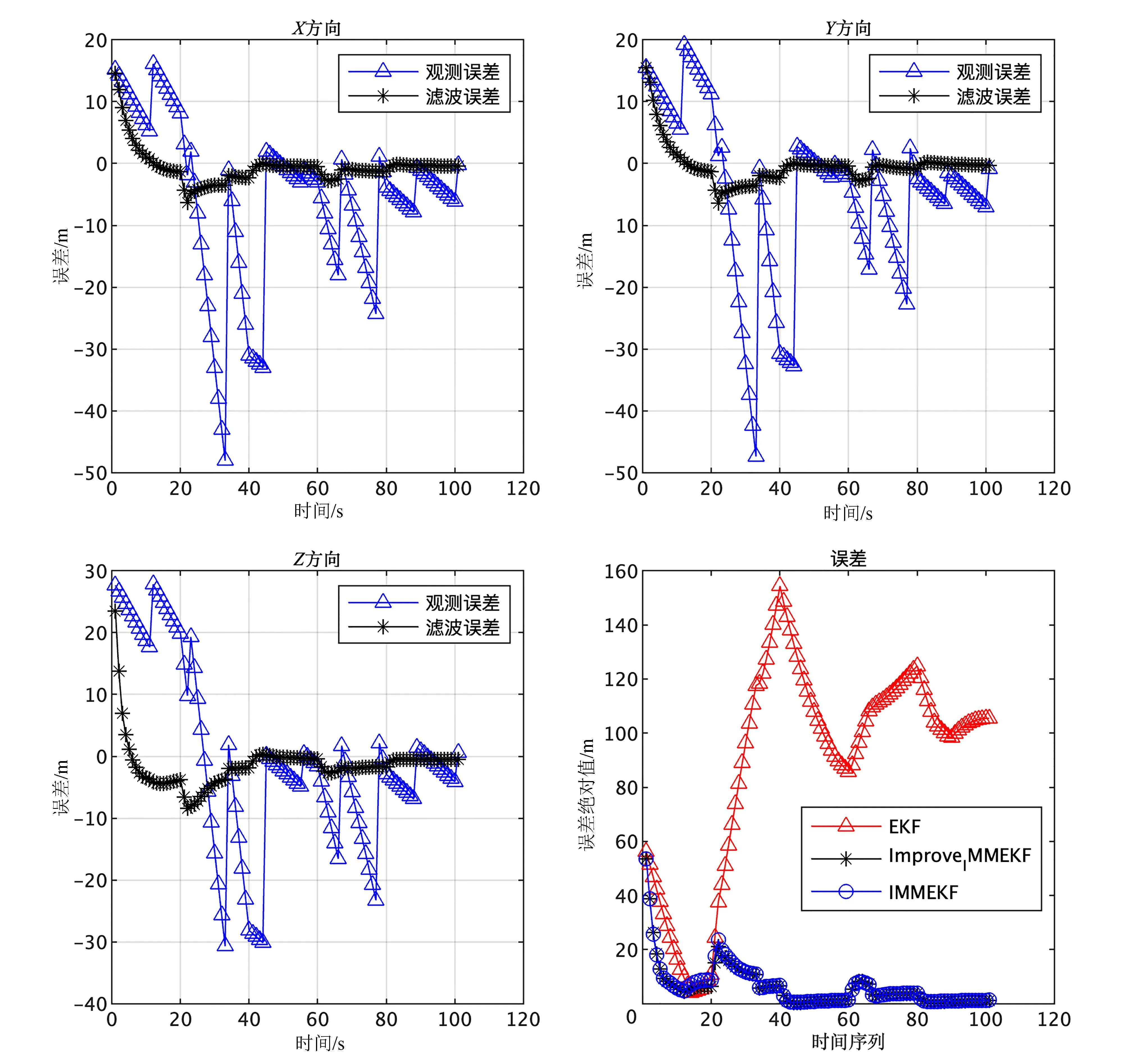
图3 算法误差对比
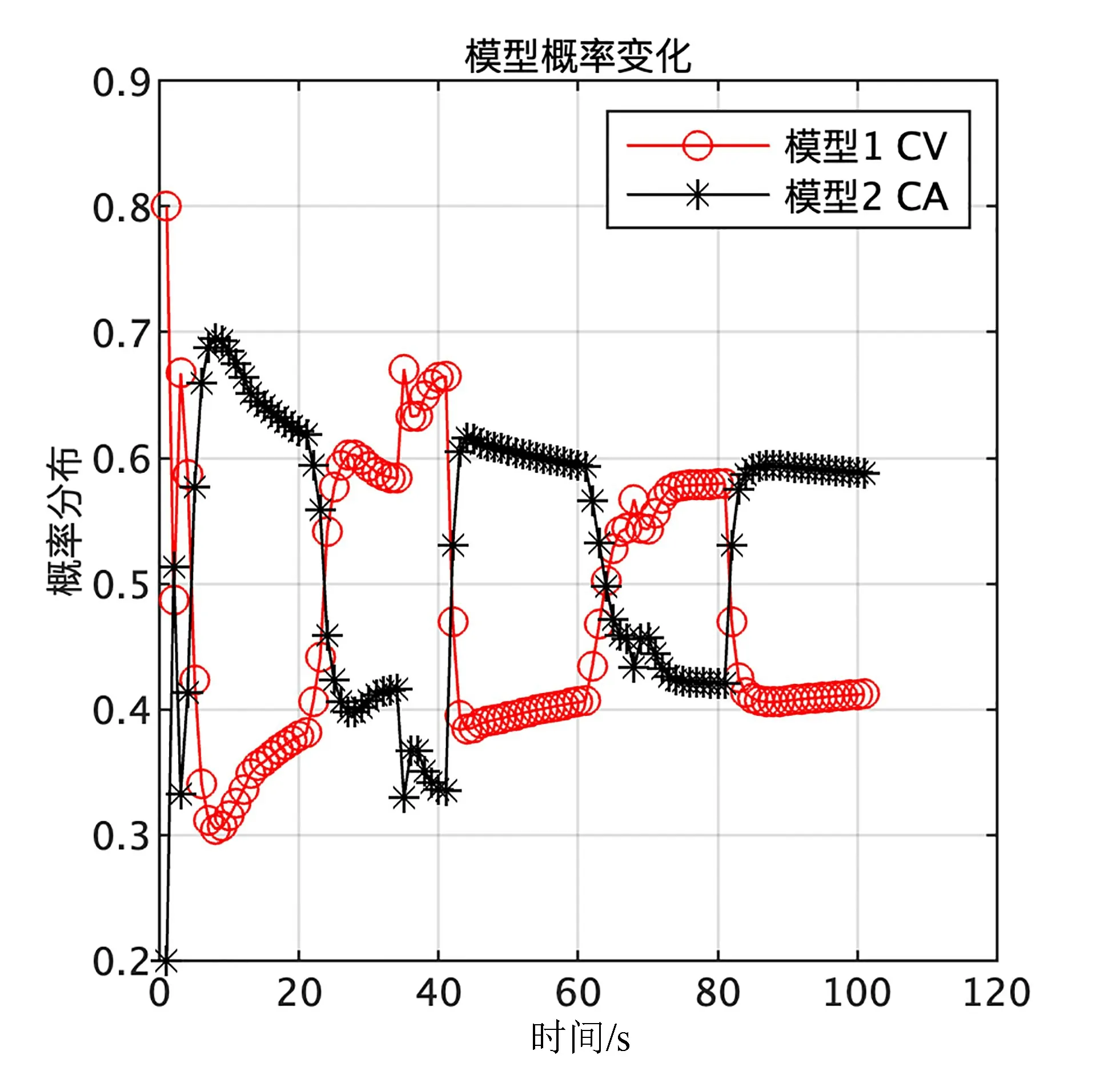
图4 AMP-IMM-EKF跟踪结果
3.2 算法性能分析
为了进一步探讨AMP-IMM 算法在模型切换过程的优势,使用双模型设置了3次模型切换过程,以进行详细观察。0~50、100~150 s目标分别选用加速度为8、4 m/s2的匀加速直线运动,50~100 s目标分别选用速度为10 m/s的匀速直线运动,规划出的真实目标运动轨迹如图5所示。为了直观体现模型切换过程,将定位时差测量误差增大为方差30 ns的高斯分布,其余设置不变。目标跟踪时长为150 s,测量周期为1 s。使用相同的实验条件,与IMM-EKF跟踪算法进行对比,结果如图5(a)中对IMM-EKF、AMP-IMMEKF算法的跟踪误差绝对值进行对比,可以发现,相较于IMM-EKF算法,AMP-IMM-EKF的跟踪性能相对较好,收敛速度较快。图5(b)~5(c)则给出了IMM-EKF算法和AMP-IMM-EKF算法的对CV 与CA模型的切换过程及比较,可看出,AMP-IMM-EKF算法在较短时间内即可完成不同模型之间的快速切换,而IMM-EKF算法则需要更长时间。
同时,AMP-IMM-EKF跟踪算法的匹配模型与不匹配模型间区别相对明显,更有利于对未来运动状态进行预测,由此可知,相对于IMM-EKF算法,AMPIMM-EKF算法在模型切换过程中的优势更为明显。
4 结束语
针对多站动目标定位中时间代价与定位性能之间的矛盾,在多站无源时差定位算法的基础上,增加了定位跟踪模块,并针对单一运动模型带来的运动模型与真实运动轨迹不匹配的问题,对IMM-EKF、AMPIMM-EKF算法进行分析,并提出了改进的交互式多模型-扩展卡尔曼滤波跟踪算法,以提高跟踪模型切换效率,实现快速跟踪定位。通过仿真验证了算法的有效性和实时性,相较于IMM-EKF和EKF算法,AMPIMM-EKF算法可以进一步提高模型匹配性能,将模型切换时间缩短至5 s以内,有效减小跟踪误差。
