基于地面LiDAR的建筑物精细化三维重建及精度分析
2023-10-19张书毕郑有雷
鲍 国 张书毕 陈 强 郑有雷 陈 春
(1.空军勤务学院,江苏 徐州 221000;2.中国矿业大学环境与测绘学院,江苏 徐州 221116;3.兖矿能源集团股份有限公司济宁三号煤矿,山东 济宁 272169)
随着“实景三维中国”以及智慧矿山等建设的不断推进,对承载数字化建设基础数据的三维模型精细化程度提出了更高要求。近年来,测绘科学技术得到了快速发展,不少三维重建数据方式不断涌现,主要有航空航天影像、无人机倾斜摄影测量(Oblique Photogrammetry,OP)、地面三维激光扫描测量(Light Detection and Ranging,LiDAR)、机载 LiDAR 等[1-6]。其中,三维激光扫描技术又被称为“实景复制技术”,是测绘领域继 GNSS 后又一颠覆性的技术革命[7-12]。与传统应用单点测量方式的经纬仪、全站仪相比,基于三维激光扫描技术的数据采集方式具有精度高、效率高、数据密度高等特点,突破了单次采集数据量少的局限性,能有效解决三维空间信息数字化方面的难题[13-19]。因此,研究基于地面LiDAR的建筑物精细化三维重建技术,并将其应用于矿区重要建筑物保护、矿山地质灾害监测具有重要意义。
近年来,业内学者在建筑物建模方面进行了卓有成效的研究并取得了丰硕成果。卢秀山等[5]提出了一种基于三维激光点云的建筑物立面分割方法,取得了较好效果;王永波等[7]提出了一种LiDAR 点云无初值配准方法,解决了大转角相似变换参数时的算法不稳定问题;林卉等[8]研究了三维激光扫描建筑物立面数据自动提取方法,提高了工作效率。上述方法在一般建筑物三维建模方面取得了较好的应用效果,但是对于结构较为复杂的建筑物,其建模精度有待进一步提升。本研究针对复杂建筑物精细化三维重建过程中存在的内部纹理不清晰、模型精度不高等问题,采用全站仪测量高精度标靶点作为地面 LiDAR点云的控制点,开展地面三维激光扫描测量技术在建模精度、细部纹理、模型完整性等方面的研究。以江苏某仿古建筑为研究对象,构建高精度的实景三维模型,并验证其精度。
1 研究区与数据集概况
1.1 研究区概况
研究区位于江苏徐州某高校校区,研究对象为仿古建筑物,如图1所示。作为仿古建筑有着传统古建筑的共性特点,如精美的斗拱、飞檐、房顶等结构,左右两端另有两条对称的廊道和内部的穿斗式结构,可作为同类建筑物的代表来研究。建筑物的斗拱、房檐、廊檐等构件结构复杂、画饰精细,对精细化三维重建的要求较高。研究区周围有高层建筑物、公路和一定数量的电网电线,日常人流量较大,且西北一侧有树木遮挡,测况较为复杂,符合复杂建筑物三维重建的一般场景要求。

图1 研究区位置Fig.1 Location of study area
1.2 数据来源
1.2.1 控制点数据
控制点数据主要指测区标靶点三维坐标,由于地面三维激光扫描仪工作时,受目标物复杂性以及扫描仪观测条件限制,无法一次获取全部数据,因此需要将多站的扫描数据整合在一起,进行点云拼接。为了提高点云拼接精度,需要获取高精度的标靶点三维坐标,故本研究采用全站仪导线测量方法采集了地面标靶点坐标(图2)。为了验证点云的绝对精度,在建筑物上布设了标靶纸,控制点坐标数据见表1。

表1 控制点坐标数据Table 1 Coordinates data of control pointsm

图2 控制点测量Fig.2 Control point measurement
1.2.2 地面LiDAR 数据采集
采用FARO S150地面三维激光扫描仪,获取测区建筑物的扫描点云数据。由于测区建筑物结构较为复杂,主建筑柱子较多、廊道转角较多、房檐和廊檐内外纹理都比较细腻,廊道内穿斗式结构造成遮挡,为保证通视和实现精细化建模,架站距离约为5 m,开阔地区则每10 m 间隔设站。鉴于对建筑物精细化建模的需要,使用室内外相结合的配置方案,建筑物内外部扫描分辨率分别为1/5 和1/4,扫描时间为8~10 min。开启彩色扫描模式,获取高分辨率全景影像,用于后期处理点云着色。扫描作业时记录各测站的位置,为补测提供依据。从外向内进行激光扫描测量工作,如图3所示。

图3 三维激光扫描测量现场Fig.3 3D laser scanning measurement site
2 研究方法
本研究主要基于全站仪导线法测量获取高精度坐标作为控制点,利用地面LiDAR 数据经过去噪处理、点云着色、多点点云拼接及坐标转换等处理,得到三维点云数据;然后在ContextCapture Center 软件中实现三维实景模型构建;最后对三维模型进行精度分析,技术路线如图4所示。
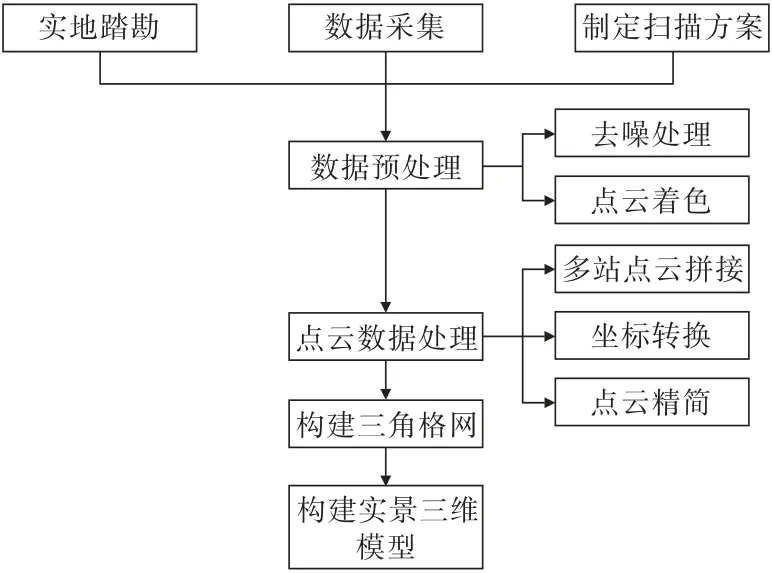
图4 基于地面LiDAR 的三维重建技术流程Fig.4 Technical process of 3D reconstruction based on Ground LiDAR
2.1 点云数据预处理
点云数据预处理主要是进行去噪和点云着色。外业扫描工作时,由于受到环境干扰,扫描仪会采集到大量的无关点云,该类点云不仅会增大数据量,还会对后期点云使用产生影响,因此需要进行去噪工作。对于有序点云数据,可采用平滑滤波方式处理,常见滤波方式有高斯滤波、中值滤波、平均滤波等[10];对于无序点云数据,可通过双边滤波算法、拉普拉斯滤波等进行处理。本研究采用高斯滤波进行去噪,其阈值参数设置为:栅格尺寸为3 像素,距离阈值为0.02 m,去噪效果如图5所示。由图5 可知:该方法可以有效过滤离群点,同时较好地保持数据原貌。由于扫描仪采集的点云只有灰度信息,为了构建实景三维模型,利用全景影像对点云赋予彩色,即点云着色。

图5 建筑物局部点云去噪前后效果对比Fig.5 Comparison of the effects before and after denoising of local point clouds in buildings
2.2 点云数据处理
多站点云拼接后得到一个整体点云,但仍然是基于扫描的相对坐标系,为将点云纳入绝对大地坐标系,还需要对点云进行坐标转换。利用外业实测的棋盘纸坐标,在软件中通过选取“控制点与点云位置的关联”功能,即可完成坐标转换。坐标转换公式为
式中,(X,Y,Z)为大地坐标系坐标;(x,y,z)为扫描仪坐标系坐标;R为旋转矩阵,(α,β,γ)为两个坐标轴系的3 个旋转角;(Δx,Δy,Δz)为坐标原点的平移量。
2.3 实景三维模型精度分析
采用全站仪在测区采集检查点获得实测坐标,在建筑物的倾斜摄影测量三维模型上量测相应点位的坐标,计算二者三维坐标的差值ΔXi、ΔYi和ΔZi,依次计算X、Y方向中误差(mX、mY)以及平面中误差(mXY),并进一步计算出高程中误差(mZ)。相关计算公式为
式中,n为检查点的个数;ΔXi、ΔYi和ΔZi分别为检查点的实测坐标和模型量测坐标的差值。
3 试验结果与分析
3.1 点云拼接结果
在进行点云拼接时,多个测站的扫描数据都是基于各自的扫描坐标系,将多个测站的扫描数据经过平移、旋转等位置变换,最后统一到同一坐标系中。拼接方法采用基于标靶和无标靶两种方法,首先采用无标靶拼接,经检验,单站平均扫描距离误差最大为3.26 mm,符合精度要求;再通过控制点将点云统一到地面测量坐标系。点云整体拼接效果如图6所示。
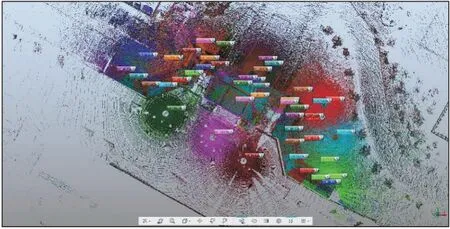
图6 测区多站扫描点云拼接效果Fig.6 Stitching effect of multi-station scanning point cloud
3.2 几何结构和纹理精度
本研究分别从模型完整性、有无空洞拉花现象、细部纹理、内部纹理结构等方面进行几何结构和纹理精度评价。基于地面LiDAR的建筑物精细化三维重建模型的各方面信息如图7所示。由图7 可知:在三维模型完整性方面,所提方法在建筑物的中下部、内部区域重建效果较好,但在顶部信息缺失严重,是由于三维激光扫描仪的工作模式所限;在三维模型的空洞拉花方面,该区域右侧有树木遮挡,但由于三维激光扫描仪可以安全、灵活地选择架站位置,能够完全获取该区域的信息;本研究三维重建方法在细部处的纹理表达效果较好,且纹理细腻、真实性强、色彩明亮;在内部纹理结构方面,该重建方法对建筑物内部构造较好,基本表达出模型内部的真实情况。

图7 几何结构和纹理精度评价Fig.7 Geometric structure and texture accuracy evaluation
3.3 三维模型点位精度分析
采用全站仪在测区采集检查点获得实测坐标,在建筑物基于三维激光点云构建的三维模型上量测相应点位的坐标,计算二者三维坐标的差值ΔXi、ΔYi、ΔZi,同时利用式(2)至式(4))分别计算X、Y方向上中误差以及平面中误差,利用式(5)计算高程中误差。各检查点的平面及高程误差统计如图8所示,各检查点的实测坐标和模型量测坐标数据以及差值见表2。
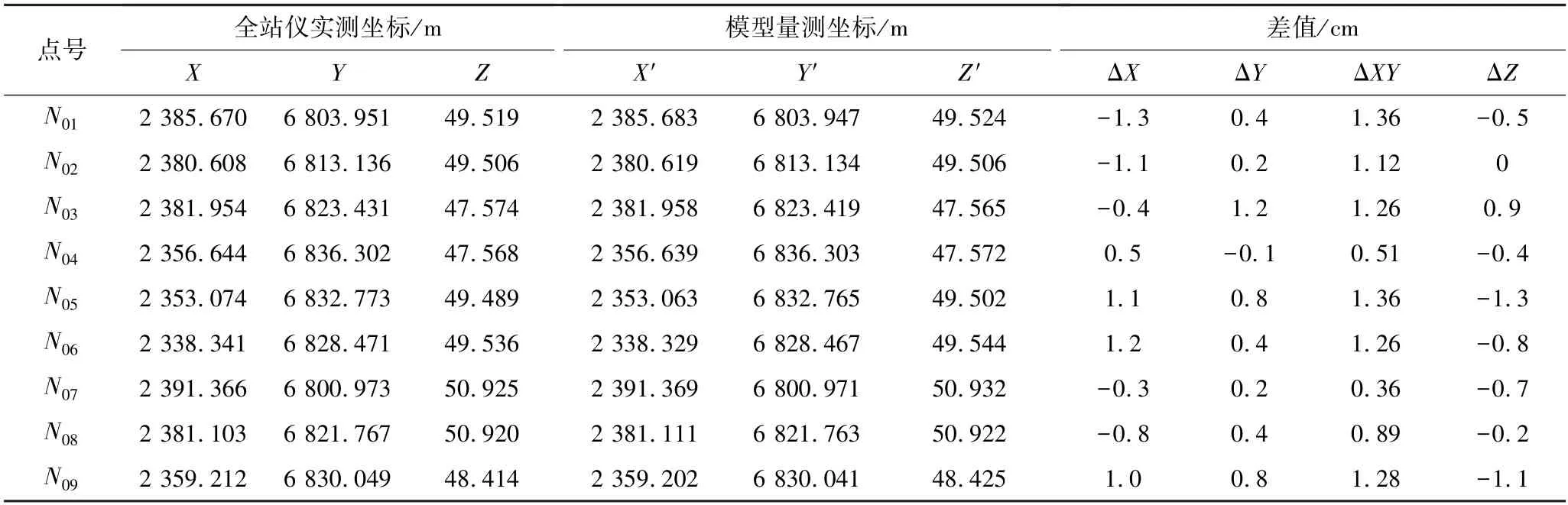
表2 基于地面LiDAR的建筑物三维重建精度统计Table 2 Accuracy statistics of building 3D reconstruction based on Ground LiDAR
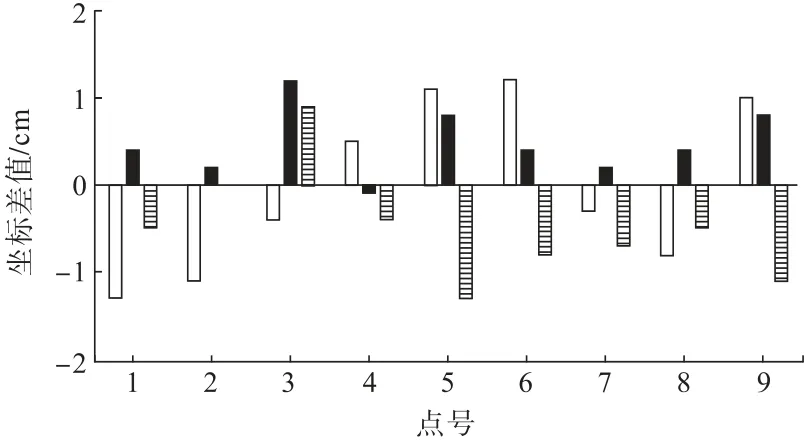
图8 三维模型点位误差统计结果Fig.8 Statistical results of point error of 3D model
结合表2 计算可知:X、Y方向中误差为±0.92、±0.60 cm,平面中误差为±1.10 cm,X、Y方向最大差值为1.36 cm,高程中误差为0.77 cm;从三维模型位置精度看,该重建方法的建模精度达到了亚厘米级。
综上所述,基于地面LiDAR的建筑物三维重建可实现亚厘米级精度,对建筑物中下部以及内部信息表达效果较好,可以还原出建筑物的实际场景,但对于建筑物顶部、上部,受限于地面三维激光扫描仪的作业模式,该重建方法对顶部信息的采集存在很大局限性,导致三维模型无法完整地表达出建筑物的全部信息。
4 结论
以较为复杂的建筑物为例,提出了基于地面Li-DAR 的三维重建方法。经过外业激光扫描、点云数据处理、三维重建等过程,实现了建筑物实景三维模型构建,并进行了三维建模质量评价。所得结论如下:
(1)所建模型对建筑物中下部以及内部信息表达效果较好,可以还原出建筑物的实际场景。
(2)建筑物三维模型精度为:X、Y方向中误差分别为±0.92 cm、±0.60 cm,平面中误差为±1.10 cm,X、Y方向最大差值为1.36 cm。
(3)基于地面 LiDAR的建筑物三维重建方法构建的三维模型几何精度较高,可以用于矿区重要建筑物保护、矿山地质灾害监测等领域。考虑到建筑物顶部、上部区域的数据获取较困难,融合无人机倾斜摄影测量技术用于建筑物精细建模是一个值得研究的方向。
