星载主动遥感测云现状与展望
2023-10-19寇蕾蕾郜海阳林正健廖淑君丁丕满朱维商建胡秀清
寇蕾蕾,郜海阳,林正健,廖淑君,丁丕满,朱维,商建,胡秀清
1.南京信息工程大学 气象灾害预警与评估协同创新中心 中国气象局气溶胶与云降水重点实验室,南京 210044;2.南京信息工程大学 大气物理学院,南京 210044;3.上海卫星工程研究所,上海 201109;4.国家卫星气象中心,北京 100081
1 引言
地球表面约有三分之二的区域被云所覆盖,云的产生、发展、消融对天气过程的演变、地—气系统的辐射平衡以及全球气候变化等起着重要作用(Li 等,1995;Stephens,2005)。对云物理的研究一直是地球科学领域中最具挑战性的领域之一,云状的形成和演变非常复杂,云量的时空分布也具有明显的局地特征,对云的宏观形态和云量全球分布的有效观测,以及对云微物理特征和变化过程的深入理解,都是影响天气预报和气候模式精度的关键因素(Randall 等,2003;丁守国 等,2005)。研究云的遥感手段根据探测平台可以分为星载、机载及地基探测,其中星载遥感以其覆盖范围广、信息量大、重复频率高等诸多优势,成为研究云的重要手段。随着卫星遥感技术的不断发展,目前已经能够利用星载光学成像仪微波探测器、测云雷达和激光雷达等多种仪器对云的宏观和微物理特征进行精确观测,结合不断进步的辐射传输计算和云参数反演技术,云物理及相关研究领域已得到快速发展(邱金桓 等,2003;Kollias等,2007)。
星载测云按照传感器的工作方式有主动遥感和被动遥感之分。被动遥感测云通过获取和记录云层自身发射或反射来自自然辐射源的电磁波信息,反演云的宏观及微观物理特征。可见光、红外、微波波段的被动遥感技术已发展相对成熟。例如2002 年5 月4 日美国发射的EOS 计划中的Aqua 卫星同机搭载了中分辨率成像光谱仪MODIS(Moderate-resolution Imaging Spectroradiometer)、高光谱大气红外探测器AIRS(Atmospheric InfraRed Sounder)和先进微波探测器AMSU(Advanced Microwave Sounding Unit),实现了可见光、红外、微波波段的全覆盖(Parkinson,2003;Xiong 等,2016)。中国2017 年11 月15 日发射的FY-3D 卫星搭载了自主研制的微波温度计MWTS-2(Micro-Wave Temperature Sounder)、微波湿度计MWHS-2(Micro-Wave Humidity Sounder)、微波成像仪MWRI(Micro-Wave Radiation Imager)和中分辨率光谱成像 仪MERSI(Medium Resolution Spectral Imager)等探测仪器,实现了对大气和云层的三维立体探测,且与2013年9月发射的风云三号C组网,可进一步提高大气探测精度(Li 等,2016;Carminati等,2021)。
主动遥感测云通过发射特定波段电磁波并接收与大气和云层作用后的回波信号,来获取路径上的云层信息,当电磁波能量较强时,可以穿透云层从而获得云层内部甚至多层云和云下气溶胶层的丰富信息。相比于被动遥感,主动遥感测云具有穿透性强、探测参数丰富、探测精度和时空分辨率高的优点,因此,在探测云层的三维结构上有不可替代的独特优势。目前星载主动遥感测云主要借助较为成熟的毫米波雷达和激光雷达探测技术,其中最典型代表是搭载于CloudSat卫星上的毫米波云廓线雷达CPR(Cloud Priofiling Radar)(Stephens 等,2002),以及CALIPSO(Cloud-Aerosol Lidar and Infrared Pathfinder Satellite Observations)卫星上的云—气溶胶偏振激光雷达CALIOP(Cloud-Aerosol Lidar with Orthogonal Polarization)(Winker等,2010)。星载毫米波雷达借助其探测波段的优势,以较强的穿透性来实现对多层云甚至较弱降水的精细化观测,成为测云技术的一个重要发展方向(Stephens 等,2008;Tanelli 等,2008);星载激光雷达以其较高的灵敏度和垂直分辨率,能够实时、连续、快速、长期和精确地探测全球范围内较薄云层(尤其卷云)和气溶胶层的诸多参数和信息(Hunt 等,2009)。CloudSat 和CALIPSO卫星从2006 年发射升空至今已正常连续运行十余年,获取了大量云垂直廓线观测数据,并被广泛应用到云物理、天气、气候、环境等多个领域,在推动科学研究发展的同时,也产生了巨大的社会和经济效益(Nam 和Quaas,2012;Stephens 等,2018;Battaglia等,2020)。
值得一提的是,CloudSat和CALIPSO联合其他几颗卫星在同一轨道上组成A-Train 卫星星座,构建了准同步主被动多波段结合的遥感观测系统(严卫 等,2008;L’Ecuyer 和Jiang,2011)。其中,CloudSat和CALIPSO对于同一区域的观测时间先后相差约17.5 s(降轨后为40 s),可实现准同步观测,两者联合获取的数据可更准确地反映云层垂直结构及其时空变化特征。CPR/CloudSat在探测较厚的云层甚至多层云方面有明显的优势,而CALIOP/CALIPSO 对光学厚度较小的云层(如卷云、高积云、高层云等)的探测更加有效和精细,两者在探测层面优势互补,相辅相成(Mace 等,2009)。CPR/CloudSat 和CALIOP/CALIPSO 的协同观测在反演云物理参数、理解全球云分布特征等方面实现了重要突破(Weisz 等,2007;Grenier等,2009;Liu 等,2012;刘屹岷 等,2018;郑建宇 等,2018)。
本文首先介绍和总结星载毫米波雷达和激光雷达技术研究现状和数据应用现状,在此基础上重点分析毫米波雷达和激光雷达协同观测和联合应用的取得的进展和不足,以及未来发展需求。进而,基于云三维结构参数前沿需求分析,对新的星载测云技术和数据产品进行展望,并从协同观测的角度,讨论主动遥感测云在多星编队组网和单星多载荷配置上的应用潜能。
2 星载主动遥感测云研究现状
2.1 技术研究现状
CloudSat和CALIPSO的成功在轨运行,标志着卫星遥感测云技术已经从传统的多波段被动遥感为主的阶段进入到主被动遥感相结合的发展阶段,其出色的三维云场数据也促进了云物理及相关领域的科学研究。近年来,随着科技的不断进步,越来越多的新技术也开始尝试在主动遥感测云中展开应用。
2.1.1 星载毫米波雷达技术
毫米波一般是指波长在1—10 mm 的电磁波,所对应的频率范围为300—30 GHz,其中,习惯上将26.5—40 GHz 称为Ka 波段,75—110 GHz 称为W 波段。毫米波测云雷达的研制始于20 世纪40 年代,美国最早研制了Ka 频段的AN/TPQ-6 雷达,用于测量云层高度(Holzworth 和Edinger,1960)。二战后,随着科技的不断进步,毫米波波段的磁控管(1945 年)和速调管(1960 年)相继问世,使得毫米波雷达开始在气象领域展开应用(Donaldson,1955)。进入80 年代后,随着大功率发射器件的研制成功,毫米波雷达技术得到了快速发展。21 世纪后,随着半导体发射器件的兴起,固态体制的毫米波云雷达研制成功,其设备体积、稳定性和耐用性等方面得到较大提升,并开始广泛应该于气象、航空和军事等相关领域(Li 等,2004;Kollias等,2007;仲凌志 等,2009)。
星载毫米波雷达技术的发展始于20 世纪90 年代,最具代表性的是在1998 年,CloudSat 和CALIPSO 计划同时被美国宇航局(NASA)的地球系统科学探路者使命(ESSP)选中。经过几年的研发和大量地面试验,两颗卫星以一箭双星的方式搭载于Delta 7420-10C 型运载火箭,于2006 年4 月28 日发射升空并成功入轨(Stephens 等,2008)。CloudSat 由美国宇航局喷气推进实验室(NASA/JPL)和加拿大航天局(CSA)联合研制,其中,CPR/CloudSat 仪器研制中涉及到3 项关键核心技术(Im 等,2001;LaBelle 等,2003)。(1)采用了由加拿大通信电力工业公司研制的放大链型分布作用速调管EIK(Extended Interaction Klystron),需要借助频率源提供激励信号,使用共振双周期的阶梯线来代替传统速调管共振腔,并配合1.9 kV的稳定高压电源,可以将发射功率放大到1.7—2.0 kW 的水平。(2)天线由复合石墨材料制成,满足表面粗糙度(小于5 μm)需求的同时,尽可能地减轻重量,并提供了半宽小于0.12°的高定向波束,且天线波束7束以外的旁瓣比主瓣低50 dB。(3)使用了准光学传输线QOTL(Quasi-Optical Transmission Line)来代替传统的波导线,基于高斯射频光束的自由空间传输方式,利用多个金属反射镜将波束进行多次聚焦来实现低损耗的传输,这也是QOTL技术首次在星载雷达仪器中使用。
在CloudSat 取得成功后,欧洲航天局(ESA)和日本航天局(NASDA)联合开发的EarthCARE卫星计划于2022 年发射(Battaglia 等,2020)。该卫星搭载了一台更先进的多普勒云雷达(CPR),具备多普勒参量的探测能力,天线直径达到2.5 m,发射机仍然选用分布作用速调管EIK 作为放大器件,同时使用准光学传输线QOTL 作为波导,轨道降低至约400 km,因此探测灵敏度较之CloudSat提高了约7 dB,且水平和垂直空间分辨率分别达到750 m 和500 m(Illingworth 等,2015;Helière等,2017)。此外,目前仍然处于设计论证阶段的云—气溶胶—生态系统(ACE)任务将进一步提升云雷达的功能和性能,例如,将使用双波段(Ka 和W)和双偏振的探测模式,其中Ka 波段雷达具备垂直轨道方向的扫描探测功能,垂直空间分辨率进一步提升至250 m(Tomiyama等,2020)。到2020 年9 月为止,ACE 的缩比模型已经研制完成,各项测试正在开展,但卫星平台和其余载荷并未确定,因此其详细参数还需要根据最终的配置方案进行论证。表1 是3 种典型星载毫米波云雷达的主要设计参数。

表1 典型星载毫米波云雷达的主要设计参数Table 1 Main design parameters of typical spaceborne millimeter wave cloud radar
中国在星载毫米波雷达系统的研发方面也开展了多年的预研和论证。2010 年,北京遥测技术研究所完成了Ka、Ku 波段星载雷达样机研制,先后突破了多项关键技术,并开展了校飞试验,取得了预期效果(商建 等,2012)。2014 年,北京遥测技术研究所、安徽四创电子公司、南京信息工程大学也已研制成功94 GHz 毫米波云雷达。2015 年,中国航天科技集团公司第五研究院和第八研究院开展了220 GHz测云雷达原理样机研制工作。国家卫星气象中心正筹划一颗测云卫星,考虑在轨搭载的主要载荷是双频测云雷达(吴琼 等,2018)。已有学者开展了94/220 GHz 的双频云雷达的微物理参数反演及灵敏度分析的仿真研究(吴琼 等,2018;吴举秀 等,2019)。
2.1.2 星载大气激光雷达技术
大气激光雷达探测技术始于20 世纪60 年代,与传统天气雷达相比,大气激光雷达的波长更短,对小粒子和颗粒物更加敏感,且激光具备更好的单色性和方向性,因此,在测量精度和时空分辨率等方面更有优势(田晓敏 等,2018)。为了更大限度地发挥激光雷达在全球大气探测中的作用,星载大气激光雷达技术应运而生。1994 年,NASA的“发现号”航天飞机搭载了一台米散射激光雷达LITE(Lidar In-space Technology Experiment),尽管只获得了约45 h 的观测数据,但成为了大气激光探测技术在空间应用的里程碑(Winker 等,1996)。此后,由欧洲航天局ESA 联合法国MATRA MARCONI 航天技术公司在1998 年成功研制了一台基于米散射技术的大气激光雷达ATLID(Atmospheric LIDAR),使用了一台1064 nm 的Nd:YAG 激光器和一个0.6 m 直径的望远镜,尽管最后未能上星,但也为后续的EarthCARE 计划起到了重要的推动作用(Marini,1998)。在随后的几年中,美国NASA 和法国国家空间研究中心CNES 联合研制了第一台真正意义上的星载大气激光雷达CALIOP,并搭载在CALIPSO 卫星上,于2006 年4月28日发射升空并成功入轨(Winker等,2010)。CALIOP 使用了两台可交替工作的固体(Nd:YAG)激光器,用于产生重复频率为20.16 Hz 的1064 nm 和532 nm 脉冲激光,脉冲长度约为20 ns,功率为110 mJ,激光光束有约0.1 mrad 的发散角,地表光斑直径约70 m。设有一个1064 nm通道和两个正交偏振的532 nm 通道,望远镜直径1 m,主镜、副镜和内部隔板都采用轻量化的铍材料制造。另外,望远镜与其他光学器件之间采取绝热处理。其出色的工程化技术和稳定的卫星平台性能,已经支持CALIPSO成功在轨运行了十多年。
在CALIPSO 取得成功后,欧州航天局ESA 研制的高光谱测风激光雷达ALADIN 搭载于Aeolus卫星在2018 年8 月23 日发射升空并成功入轨(Lux等,2020)。这项耗资5.5 亿美元、历时16 年的科学项目,正式成为世界上第一颗全面监测全球风场的遥感卫星,可提供自地面至30 km 高度处的高时空分辨率、近实时水平径向风速信息。计划于2021 年发射的EarthCARE 卫星也搭载了一台大气激光雷达ATLID,利用高光谱分辨率(HSR)探测技术,将瑞利散射(大气分子散射)和米散射(云和气溶胶粒子散射)的信号进行有效分离,很大程度上提高了探测精度(Do Carmo 等,2019)。ATLID 将Nd:YAG 激光器进行三倍频,从而得到355 nm 波长,同时具备35 mJ的脉冲能量,光束的发散角极小,地面光斑直径仅为10 m 左右,减小多次散射带来的影响,而法布里—珀罗标准具的光谱带宽也达到了0.3 pm。米散射通道的垂直分辨率为100 m,瑞利通道为500 m,出色的信噪比也使得后向散射系数的探测灵敏度达到了8×10-7m-1sr-1。
此外,目前仍然处于设计论证阶段的ACE 任务也计划搭载一台拥有3个波长(355 nm、532 nm、1064 nm)的高光谱分辨激光雷达(HSRL),至少在两个波长上具备偏振探测能力(Müller 等,2014)。基于这一技术,NASA 首先研制了一台双波长(532 nm 和1064 nm)的简化版云气溶胶传输系统CATS(The Cloud-Aerosol Transport System),搭载于国际空间站ISS 进行了两年多的连续观测(2015-04—2017-09),为ACE 任务中HSRL 激光雷达的研制提供了支撑(Tomiyama 等,2020)。表2是典型星载激光雷达主要设计参数。
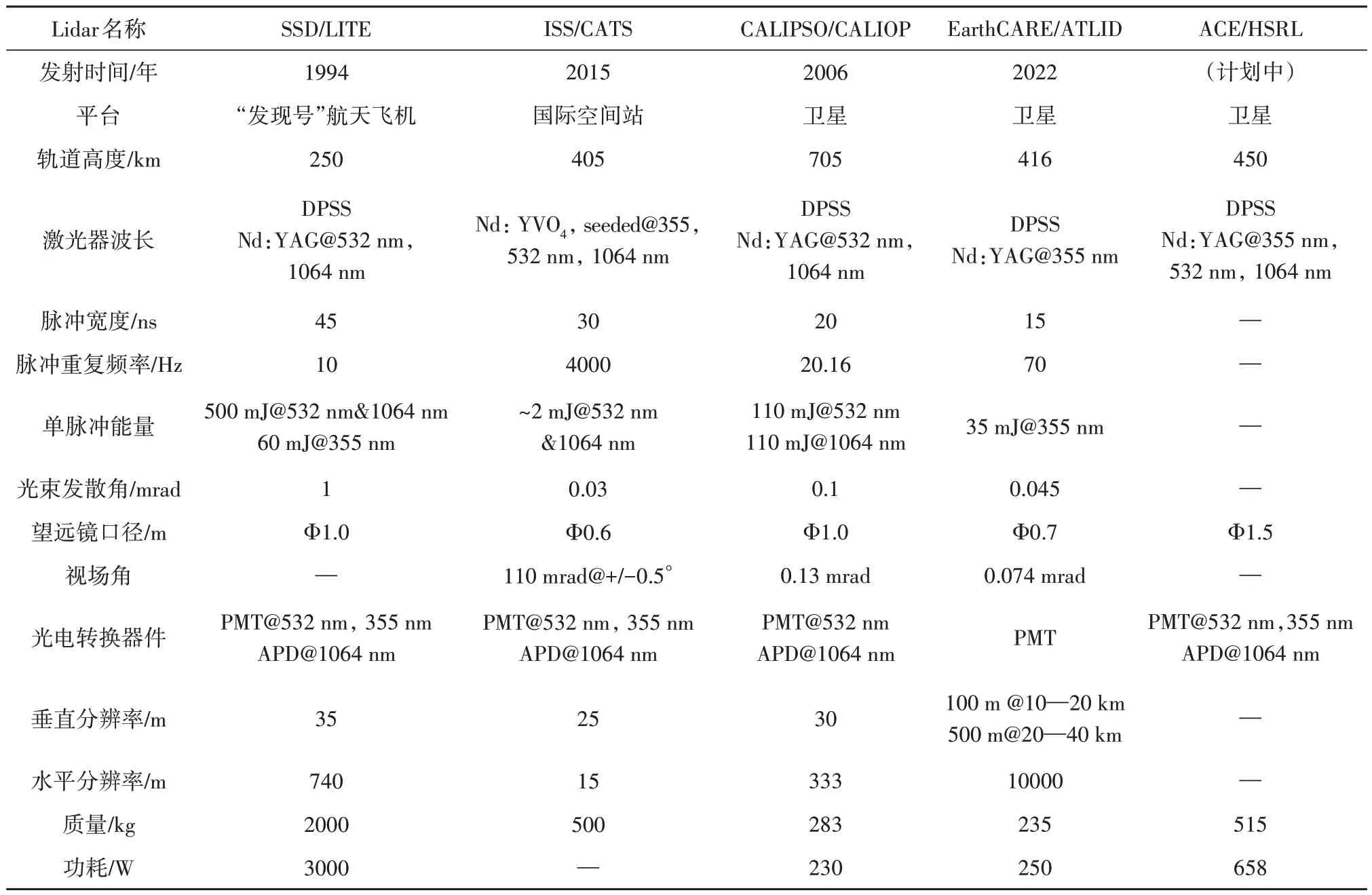
表2 典型星载激光雷达主要设计参数Table 2 Main design parameters of typical spaceborne Lidar
国内多家单位和企业已经掌握了目前的大气激光雷达主流技术(卢乃锰 等,2016;宋长波和赵一鸣,2017;徐俊杰 等,2020;邵江锋 等,2020;郭金家 等,2008)。其中,中国科学院上海光学精密机械研究所牵头的基于高光谱探测技术和差分吸收技术的星载激光雷达项目已经在执行中,并拟于2021 年发射中国第一台星载激光雷达(穆永吉 等,2018)。目前,国内已经立项第二颗星载激光雷达用于温室气体的测量(谢杨易 等,2014),且多家单位也已经开展了星载测风激光雷达的预研(于翠荣 等,2013),同时拟搭载海洋测量激光雷达的“观澜号”卫星项目已经立项建设(陈戈 等,2019)。现状表明,中国已经进入星载大气激光雷达发展的高潮期,同时在配套的正演模型、反演技术和数据拓展应用层面也已有大量相关的研究成果。
2.2 数据典型应用现状
自2006 年A-train 卫星编队中的毫米波雷达CPR 和激光雷达CALIOP 成功发射以来,已取得十来年的数据。这些数据已应用到云物理学、天气过程、气候变化、数值模式等多个领域,取得良好的社会和经济效益。
2.2.1 毫米波雷达数据典型应用
(1)云的宏微观物理特性及其分布特征。CPR可穿透云层,对单层云和多层云都有良好的探测能力,在云的宏观结构及其分布特征、云的三维微物理结构特征等方面取得了显著应用成果。利用CPR 的云廓线和云分类等产品可分析不同地区、不同地形、不同云类、不同云相的云垂直结构、云量、云出现频率、云微物理量、云光学性质及其空间地理分布和季节变化统计特征(Sassen and Wang,2008;王帅辉 等,2011;Adhikari等,2012;赵艳风 等,2014;Guo 和Zhou,2015)。基于CPR观测资料还可反演云内液/冰水含量、云粒子有效半径、云光学厚度等云微物理参数(L’Ecuyer 等,2008;Austin 等,2009;Deng 等,2015)。了解不同类型、不同地区云的宏微观结构及其分布特征,可提高对天气系统和云微物理结构的认识,改善云微物理参数化方案的构建,且可能为全球和区域气候模式提供了可靠的云气候特征资料,为模式参数化方案的改善提供很好的依据(Luo 等,2008;Matrosov,2011;张华 等,2015;杨冰韵 等,2017;Dodson等,2018;Kukulies等,2019)。
(2)与其他传感器探测的对比验证。CPR 可探测得到较高垂直分辨率较高精度的云剖面信息,CPR 优秀的云垂直结构刻画能力可很好的评估和检验其他卫星探测资料(MODIS、CALIPSO、TRMM、GPM、风云卫星资料等)、地面及飞机观测资料以及数值模式结果等。有许多学者利用CloudSat 云剖面产品对MODIS、AIRS 等探测反演的云顶温度、云类等产品进行了对比验证(Weisz等,2007;邱玉珺和王宏奥,2017)。还可利用CPR 资料与地基雷达或GPM 卫星观测的弱降水或降雪进行对比分析,以改善雷达降雪反演算法(Norin 等,2015;Casella 等,2017)。云类型或云高度的模拟误差,可能通过辐射效应引起较大的天气或气候模拟偏差,CPR 良好的云类型和云垂直结构资料为评估模式提供了很好的观测资料(Marchand等,2009;Dodson等,2018)。
2.2.2 激光雷达数据典型应用
(1)卷云的全球分布及云微物理特征。CALIOP 借助其短波长和高探测灵敏度的优势,在较薄的云层尤其是卷云的探测方面发挥了重要作用,极大地增进了人们对卷云全球分布特征(云顶高、云边界、云出现频率等)和宏观演变过程的深入理解(Nazaryan 等,2008;郑建宇 等,2018)。同时,与被动测云技术的结合(如MODIS等),也为卷云的辐射强迫计算以及在气候变化中的作用研究提供了支撑(Huang 等,2009;Min等,2010)。双波长和双偏振通道的设计,使得通过退偏比和色比可以在一定程度上对云相态进行识别,能够较好地区分较薄云层中的水云、冰云和混合相态云,为云层的微物理特征研究提供基础(Hashino 等,2013;Winker 等,2009)。此外,其垂直廓线的探测能力,能够有效识别双层和多层云,也为极地平流层云的研究提供机会(Wang等,2016;Pitts等,2009;Mao等,2021)。
(2)气溶胶的垂直结构及气溶胶与云的相互作用。CALIOP 的短波长和高探测灵敏度在小颗粒的气溶胶探测方面具有独特优势,获取的高时空分辨率大范围三维数据(Chepfer等,2008;Huang等,2015;Guo 等,2016),能有效识别气溶胶或污染物的层高、分布、演变和可能来源(Liu 等,2009;Vernier 等,2011;Hu 等,2016)。将其不同波长回波信号的色比、双偏振通道的退偏比以及回波强度结合,能够用于识别气溶胶的主要类型,同时根据气溶胶层出现的高度和水平方向的延展范围,可对污染物输送进行示踪(Huang 等,2009;Sekiyama 等,2010;Yu 等,2010;Liu 等,2018;Guo 等,2017)。在云与气溶胶的相互作用方面,其出色的数据能够帮助解释气溶胶在垂直方向上如何作用于云降水发生和发展,通过识别和确定气溶胶和云相互混杂的层次,获取气溶胶与云参数(如云滴有效半径、液水含量等)之间可能存在的关联性(Varnai 和Marshak,2011;Devasthale 和Thomas,2011;Wang 等,2015;Chen等,2016)。
3 CloudSat与CALIPSO的协同观测
2006 年4 月28 日,CloudSat 和CALIPSO 以一箭双星的方式发射并成功入轨。CALIPSO 滞后CloudSat 大约17.5 s,这两颗星与Aqua(2002 年)、Aura(2004 年)、PARASOL(2004 年)、GCOMW1(2012)和OCO-2(2014)组成被称为“ATrain”的星座计划,轨道高度相同,均为705 km,与赤道交错时间大约在当地时下午的1:30,因此,又称为“午后星座”(严卫 等,2008;Stephens等,2018)。直到2018 年2 月,由于技术问题影响了卫星的正常运行,CloudSat不得不实施了降轨操作。随后,为了协同观测的效果,2018 年9 月,CALIPSO 也执行了降轨,加入到CloudSat 的轨道,前后间隔约40 s,从而组成“C-Train”,其轨道在A-Train 下方16.5 km 处,大约每隔20 d 与A-Train地面星下点轨迹相交一次,从而可以在此期间进行短暂的“A-C”协同观测。
对于CloudSat 和CALIPSO,CPR/CloudSat 优秀的穿透云层能力在探测较厚的云层甚至多层云方面有明显的优势,而CALIOP/CALIPSO 对光学厚度较小的云层(如卷云、高积云、高层云等)的探测更加有效和精细,但很难透过较厚的云层观测到云内部结构的完整信息(Mace 等,2009)。因此,两者在探测层面可实现协同观测和联合处理,优势互补,从而得到更加精确和完整的云层垂直结构及其时空变化特征。
3.1 协同观测的成果
(1)联合反演云物理参数。CPR 和CALIOP 对不同云层不同相态有不同的敏感性,两者联合反演,可以获取更多的云层结信息,进而可得到更准确的云相态、云类型、云层光学厚度、云水含量等物理参数,如CloudSat 二级产品中云几何廓线、云分类、大气辐射通量和加热率产品。CPR和CALIOP 再与被动传感器结合进行多源数据融合反演,能更好的刻画混合相态层云、深对流云、台风云系的分布和变化等信息,从而改善云参数化方案和数值天气预报结果(严卫 等,2011;Kato 等,2011;Adhikari 和Wang,2013;Pan 等,2017;傅云飞,2018)。如Chen 和Sun(2019)从PARASOL、CALIPSO、Cloudsat 卫星数据进行云顶相态的动态空间融合方法,并以台风“卢碧”为研究对象,说明了台风中不同相态云的分布特征。
(2)更完整的云的宏微观分布特征。CPR 对光学厚度较厚的大尺度粒子组成的云层敏感,CALIOP 对薄云和光学厚度较小的卷云敏感,CloudSat和CALIPSO两种探测资料联合,可得到更完善的云层垂直结构信息,全球低云、中云、高云的各层云量及所有层的总云量分布及季节变化,云出现频率,辐射效应等的计算和评估更加准确(Zhang 等,2010;汪会 等,2011;Das 等,2017;Yu 等,2018;唐雅慧 等,2020)。如郑建宇等(2018)利用CloudSat 和CALIPSO 联合资料分析了8种云类的云量四季分布,此结果可与区域或全球气候模式的云量模拟结果相比,且可进一步优化模式的云量诊断方案。
(3)促进气溶胶—云—降水过程的理解。CloudSat和CALIPSO 的联合可帮助阐明云凝结核和冰核颗粒特征,及其在塑造云微物理性质和形成降水中所起的作用,进而改进气溶胶—云相互作用对气候系统产生辐射强迫的理解(Zhang 等,2015;Stephens 等,2018)。如Grenier 和Blanchet(2010)利用CloudSat 和CALIPSO 资料研究了极地薄云中云参数的分布规律和气溶胶分布,说明了气溶胶、云和辐射的相互作用。Takahashi 等(2017)利用CloudSat 和CALIPSO 资料,结合地面观测和模式仿真说明了暖雨形成过程的海陆差异。
3.2 协同观测的发展需求
要真正意义上实现有效的协同观测是一项复杂的系统工程。随着CloudSat/CALIPSO 甚至整个A-train 星座取得的成功,人们越来越意识到协同观测的重要性。实际上,一个协同观测系统在确定了观测目标后,首先须对每一个核心观测单元提出较高的基本要求,其次根据观测单元的特点对观测编排模式进行精妙设计,接下来需要配备辅助观测单元来完善整套系统,最后需要借助一定的理论体系将整个观测系统的数据进行串联和融合。尽管CloudSat/CALIPSO 在协同观测层面取得了令人瞩目的成果,但基于主动遥感测云的协同观测在未来发展中还有很大的提升空间。
(1)主动遥感测云载荷性能的提升。星载激光雷达和毫米波雷达本身的仪器性能有待进一步提升。其中,误差水平是仪器性能的直接体现,在原有水平上提高15%—30%,探测数据将在各种尺度天气过程的数值预报、数据同化中得到更多的应用。在时空分辨率方面,激光雷达拥有一定的优势,而毫米波雷达如果能够提高至沿轨500 m和垂直300 m 以内,则更有利于云层精细结构和微物理特征的分析。在最小探测阈值的提高方面,激光雷达需要进一步提升信噪比,以提高在白天的探测能力,而毫米波雷达的灵敏度则有望提升至-35 dB,从而具备对弱云的观测能力。此外,探测波段的拓展和探测功能的增加也是未来的发展趋势。只有仪器本身的探测能力提升,探测参量拓宽,才能在协同观测中实现更好的优势互补。
(2)协同观测模式的精细化改进。从时空匹配的同步性和一致性来看,单星双机模式要优于双星双机模式。对于单星平台而言,其优势在于研制、发射和后期飞控运维成本更加合理,且能够实现真正意义上的同步共视场观测,但仪器要在保证探测能力和整机体积之间进行妥协,同时轨道高度要降低至400—500 km 的范围以内,从而保证较高的探测灵敏度,这样也是欧空局研制EarthCARE的思路。相比之下,双星模式对载荷和轨道的要求则要宽松,若在适当考虑体积和研制成本的情况下,单机的仪器性能可以实现突破,带来更高的时空分辨率,且有望在重点观测区域增加垂直轨道方向的扫描式观测,实现更宽广区域内的精细化的探测。
(3)与被动遥感仪器的配合。从已有的报道来看,主被动技术的结合在观测云方面具有独特的优势。其中,CALIOP/CALIPSO、CloudSat/CPR与MODIS、红外云成像仪的联合能够改善云层微物理特征的反演结果,同时在云的辐射强迫定量研究中也有应用。但由于本身探测模式的差异性,相互之间的深度融合还未真正实现,如果主动遥感仪器能在特定区域内借助横向扫描探测实现水平探测区域的拓宽,并综合考虑协同观测中的同步共视场问题,那么与被动遥感成像仪器数据的融合将会更加有效。此外,与临边模式的被动遥感仪器实现共视场的协同观测,也有利于数据反演准确性的提升,但对轨道设计的要求非常严格。
(4)多源数据的联合反演和融合。目前尚未有真正意义上的多源数据联合反演算法,使得大量不同平台、不同体制和不同探测原理的载荷很难实现多源数据的有效融合,数据联合使用率较低。在未来,开发能够同时融合多源数据的反演算法,构架数据融合反演系统,真正意义上将协同观测模式下获取的高质量数据进行充分利用,如在微物理参数的反演、云量的反演、云辐射能力的反演等方面有着广泛的需求。
4 星载主动遥感测云展望
尽管CloudSat、CALIPSO 在云宏微观特征、气溶胶特性、云模式应用等方面取得显著成效,但CPR/CloudSat、CALIPO/CALIPSO 在时空分辨率、灵敏度等方面依然有一定局限性,进而影响其产品在中小尺度云降水探测和参数化、气溶胶—云相互作用的过程、云降水动力过程诊断分析等方面的应用效果。云顶高度探测是CloudSat/CALIPSO的优势,但受仪器灵敏度和辐射衰减的影响,云底高度的探测始终是一个极具挑战性的难题,尤其是对深对流云,由于信号衰减导致难以得到真实的云底信息。且CloudSat/CALIPSO 只能给出特定轨道的云特性廓线(剖面),难以实现真正的三维扫描观测。另外,CPR 空间分辨率较低,使得中小尺度的云降水探测不够精确,且易出现波束充塞导致参数估计不准确;目前的星载测云雷达无速度信息,从而不能很好地进行云降水的动力过程研究;CALIOP 由于采用的传统双波长体制,在各项参数的反演方面受限于激光雷达比的选取;对于较厚的云层(尤其水云),CALIOP 有明显的局限性,甚至无法有效观测其下方的气溶胶层信息,在一定程度上带来误差。
近年来,随着主动遥感技术的不断进步,以及未来EarthCare 和ACE 计划的推出,星载主动遥感测云已经成为大气遥感领域里的热点研究方向。目前,各类新技术、新方法及新的协同观测模式不断涌现,同时更多深入的科学问题也亟待解决,星载主动遥感测云真正地进入了快速发展时期。
4.1 星载主动遥感测云的新技术
(1)太赫兹雷达技术。太赫兹波长因为接近于云粒子而更适合探测云目标。这主要是因为星载平台避免了太赫兹波近地面大气衰减严重的问题,太赫兹波对微小尺寸冰晶粒子的探测较为灵敏,含太赫兹波的双频雷达观测有助于提升云反演精确度。目前的制约主要来自于固态发射机的功率和探测器效率,但从已有的报导来看,当前太赫兹技术的发展有望满足星载太赫兹云雷达研制需求,国内外学者已在太赫兹测云雷达方面进行了预研论证,且提出了合理的需求指标(Battaglia等,2014;王平和王海涛,2017;商建 等,2018)。随着技术研究及应用的持续开展,该技术有望成为主动遥感测云领域的一支生力军。
(2)多普勒技术。现在的星载测云雷达主要提供强度数据,但雷达多普勒速度谱包含了丰富的云、和降水的微物理和动力信息,近些年越来越多的国外学者利用多普勒速度谱对云、弱降水的微物理过程进行分析(Kalesse 等,2013;Zhai等,2020)。Battaglia 等(2018)开发了一套W 波段星载测风云雷达模拟器,成功模拟了具备倾斜收发视场的星载W 波段云雷达多普勒观测过程。2018 年全球第一台星载测风激光雷达ALADIN 搭载于Aeolus 卫星发射升空,但2020 年开始发布的数据产品中还未涉及气溶胶和云的相关产品,且相关算法还有待进一步改善,例如其Rayleigh风廓线产品在中国东部等高污染区存在很大偏差(Guo等,2021)。目前,包括中国在内的多个国家已经重点开展星载测风技术的研究(Battaglia 等,2018;于翠荣 等,2013)。
(3)多波长技术。在反演云微物理参数如云粒子大小、液水/冰水含量等时,单波长雷达反演具有较大不确定性。利用不同波长云雷达,根据云粒子对不同波段电磁波散射的差异,可以获得云粒子更多微物理信息。如GPM 星载双频降水雷达(DPR)利用Ka、Ku 两个波段测量降水,由于可得到降水的滴谱信息,从而可提高降水精度,且进一步改善弱降水估计(Skofronick-Jackson 等,2018)。在未来,如何论证利用W 或Ka 波段毫米波雷达与太赫兹雷达的联合探测反演云相态等微物理参数是一项重要的前沿工作(吴琼 等,2018)。同时,激光雷达也开始在原有的532 和1064 nm 基础上,增加355 nm 和1.5 μm 的波段,用于大气成分的测量和更精细化的参数反演(Marini,1998;Qiu等,2017)。
(4)多极化技术。多极化技术可以利用接收的共极化和交叉极化信息改善云粒子测量精度,增强雷达对不同类型粒子的识别能力,并可提供关于粒子大小分布、形状与相态等微物理参数信息。地基偏振(极化)雷达近些年来在云降水探测方面已得到长足发展,如美国大气辐射测量(ARM)计划项目中使用的W 波段和Ka 双极化垂直指向云探测雷达系统(Kollias 等,2016)。Galletti 等(2014)论证了天顶/天底指向毫米波雷达在线极化和圆极化探测模式下不同散射体的极化特征和探测性能。随着该技术的成熟,不久的将来多极化技术将实现星载雷达平台的应用。
(5)高光谱激光雷达技术。与传统的Mie散射激光雷达相比,高光谱分辨率激光雷达(HSRL)通过窄带光学滤波器将分子Rayleigh 散射信号和气溶胶Mie散射信号分离开,可极大地提高了反演气溶胶光学参数的精度,从而可更好的应用到云—气溶胶相互作用研究中。计划于2022 年发射的EarthCARE 搭载的ATLID(Do Carmo 等,2019)和ACE 搭载的3 个波长HSRL(Müller 等,2014)都将采用这种高光谱探测技术。目前中国科学院上海光学精密机械研究所牵头研制的第一台星载高光谱分辨率激光雷达正样已经完成,并处于上星前的最后测试阶段,预计于2021 年上半年发射入轨(穆永吉 等,2018)。高光谱激光雷达技术和产品研发是近几年中国甚至国际上的研究热点。
(6)多传感器数据融合反演技术。已成功发射的A-train 系列卫星和GPM 卫星,均以卫星编队的方式获取地球大气、海洋、资源等信息。即将发射的EarthCARE 及在研的ACE 卫星任务,将采用多载荷共平台集成复合观测模式。多载荷协同观测及多传感器数据融合,建立云参数的时空同步且高空间分辨率的反演新算法和数据融合新技术新方法是未来发展趋势。在即将到来的十年里,如EarthCare 和ACE 卫星任务等多种新型传感器的出现,必然带来新的数据集,因此,大量相关数据的融合反演技术在未来会有迫切的需求。
4.2 单星及多星平台协同观测的新模式
随着卫星平台技术的不断进步,如何更加有效地实现载荷与卫星平台的最优化配合,以及平台间的高度协同,从而最大程度发挥载荷效能,是主动遥感测云领域的一个重要发展方向。目前面临两种技术路线的选择:一种是将各个主动遥感设备安装在不同的卫星平台上,进行双星或多星编队组网协同观测;另一种是将所有设备载荷装载在同一卫星平台上,进行单星在轨观测。不同技术路线的选取,在载荷分配形式、卫星平台需求、轨道需求和探测模式等方面有很大差异。对于卫星平台而言,需要将毫米波云雷达、激光测云雷达配置于相同或不同的卫星平台,并适当加入被动光学成像仪(可见光、红外、偏振多角度等)等载荷实现协同观测。同时,考虑卫星在轨飞行阻力的情况下,需要适当调节配置来保持平台各自总重的平衡,并将载荷与平台的空间、电力、温控系统、姿态稳定度、数据传输等系统进行高度配合。
(1)双星系统。CloudSat和CALIPSO 取得的成功已经验证了双星系统的有效性,但其探测模式仍有提升空间(Stephens 等,2018)。对于双星系统,需要将毫米波云雷达、激光测云雷达分别配置于不同的卫星平台,其探测模式主要有两种:独立视场模式和共视场模式。
独立视场模式是指两颗卫星主载荷的探测视场在同一时刻没有交叉区域,如图1(a)所示。CloudSat和CALIPSO属于这种探测模式,两台主载荷的视场均为垂直向下,没有交叉区域。这种模式的好处在于,轨道高度固定后,探测路径最短,接收的回波信号最强,受到潜在的太阳背景光的影响较小,但缺点是两星的探测目标之间有时差,如CloudSat 和CALIPSO 为17.5 s(Kato 等,2010)。共视场模式是指两颗卫星主载荷的探测视场分别前后倾斜,在视场交叉处实现同步观测,避免了探测目标间的时差。但其不足之处在于交叉点仅能在某一高度上实现同步观测,由于视场的倾斜,在交叉点上部和下部都无法重叠;其次,每个载荷测得的廓线是沿着视线路径斜距上的信息,与真正意义上的垂直结构有一定偏差;另外,视场的倾斜会导致视线路径加长,接收回波信号强度减弱,从而影响探测灵敏度。

图1 单星及多星平台协同观测的新模式示意图Fig.1 Schematic diagram of new modes for collaborative observation of single-satellite and multi-satellite platforms
(2)多星系统。多星系统的范畴比较广,如A-train 在同一条轨道配置了6—8 颗星来组成卫星群(L’Ecuyer 和Jiang,2011)。这种方式能够获取更优质的探测数据,体现技术实力,也将是中国气象卫星系列未来发展的重要方向。本文提出一种四星编队系统“FoRcLouD”,其中“F”、“R”、“L”、“D”分别代表四颗卫星的简称和次序:1)“F”意为First,代表第一颗星,主要搭载各类被动光学/微波成像仪;2)“R”意为Radar,主要搭载毫米波雷达;3)“L”意为Lidar,主要搭载激光雷达,同时“R”与“L”也有左右相伴的意思;4)“D”星排第四,也有“enD”结尾(D)的意思,代表四星编队的最后一颗,主要搭载多种临边观测仪器。
四星编队系统的共视场模式能够最大程度体现协同观测的优势,如图1(b)所示。其核心思路是让D 星临边观测的视场与其他三颗星的视场有交叉区域。其中,L 星向后指向,R 星向前指向,D星距离较远,其临边视场与大气层的切点刚好在R星和L星指向的交叉点,这样保证较为完美的共视场。不仅能够获得云内部的垂直回波结构,而且临边观测的数据也可以提供切点位置的水汽、温度、大气成分等廓线,为综合观测分析提供优质数据基础。另外,F星位于编队的最前方,其观测视场角较大,如果F 星与L 星的距离不超过一定间隔(如15—45 s(L’Ecuyer 和Jiang,2011)),则可以认为在一定程度上满足同步观测的需求。
(3)单星平台。单星独立飞行观测的优势体现在高度协同的共视场模式、与被动光学成像仪的配合以及较理想的卫星研制成本等方面,但其难度在于卫星平台和各个载荷体积之间的合理搭配。目前EarthCare 卫星和ACE 计划都将采用单星平台(Barker 等,2011;Da Silva 等,2020)。在载荷的选择方面,单星至少要搭载4—5个有效载荷,包括2 个主动仪器和2—3 个甚至更多的被动成像仪等,较多的载荷导致探测模式相对多样化,如图1(c)所示。根据CALIPSO 和CloudSat 的经验,以及EarthCare 的一些考量,可以发现激光雷达的视线与毫米波雷达视线并不是完全一致,激光雷达为了避免直接反射的影响,需要在星下点方向一侧倾斜1°—3°(Hélière 等,2017)。另外,被动光学成像仪需要考虑与太阳的夹角以及与激光视场的干扰问题,因此视场指向的选择也要有一定的差异性。
4.3 卫星轨道高度的发展趋势
从上文中可以看出,A-train 早期的轨道在705 km,而目前的ISS/CATS、EarthCARE、ACE 已经将轨道分别降至405 km、416 km、450 km 的高度上,这也意味着主动遥感测云的卫星轨道在朝着更低的高度发展。
对于主动遥感设备而言,卫星轨道越低越能够提升雷达的回波信号接收强度,但过低的轨道意味着在轨飞行的阻力更大,需要频繁对轨道实施调整,增加了运维复杂度和风险。另外,轨道降低的同时也增加了载荷设计和配置的复杂度。一般而言,在仪器定型后,各项参数不再改变的情况下,想进一步提升接收信号的强度,则需要降低轨道高度。以CALIPSO 和CloudSat 的轨道高度和仪器为参考,原始的轨道高度Zsat_0为705 km,设原始接收回波信号强度为I0,降低后的轨道高度为Zsat,接收回波信号强度为I,则两次强度的比值也即接收回波信号强度的提升水平I/I0与轨道高度满足如下关系:
式中,Z为探测高度。当不考虑复杂因素时,接收回波信号强度与轨道高度基本满足平方反比的关系。如图2(a)所示,使用不同的轨道高度(350—750 km),接收回波信号强度的提升水平I/I0随着轨道高度的下降,在不同的探测高度上都会有大幅的提升。如图2(b)所示,当探测高度Z固定在10 km 时,不同的轨道高度上接收回波信号强度的提升水平I/I0呈现明显的平方反比关系。

图2 接收回波信号强度的提升水平I/I0与轨道高度的关系Fig.2 The relationship between the enhancement level of the received signal intensity I/I0 and the orbit height
对于双星系统而言,要将毫米波雷达原始的最低探测灵敏度-30 dBz提升至-35 dBz,接收回波信号强度需要提升为原始强度的约3.16 倍,这时轨道高度至少需要下降到约404.3 km。但从另一个角度考虑,如果维持-30 dBz 的最低灵敏度,那么天线的尺寸可以大幅缩小,从而节省载荷质量和空间。但是,对于多星系统而言,降低轨道会使被动光学成像仪视场角的覆盖面积缩小,若要增大仪器视场角,需要在像差的控制方面做更复杂的光学设计。
对于目前备受关注的单星平台,最重要的一点是在满足探测指标的情况下,尽可能缩小载荷配置空间,合理选择平台,最大化利用效能。如果以达到与CALIPSO 和CloudSat 相同探测灵敏度为目标,那么天线直径和轨道高度会形成明显的正比依赖关系。当轨道高度下降至400—500 km 的区间时,探测器和光学系统不变的情况下,激光雷达的望远镜直径和毫米波雷达的天线直径可以进一步缩小。如果要将毫米波雷达探测灵敏度提升至-35 dBz,且激光雷达信噪比同比例提高,当轨道在400—500 km 区间时,激光雷达的望远镜和毫米波雷达的天线直径均需要大幅增加,这样体积的载荷需要考虑使用大型的卫星平台。针对这一难点,EarthCare 的思路是将激光雷达的望远镜口径缩小,而将毫米波雷达的天线大幅增大,并利用工程技术在保证重心稳定的情况下,将天线做至平台外部,从而达到了提升灵敏度的同时又兼顾卫星平台选择最优化的目标(Do Carmo 等,2019)。
综上,单星独立观测虽然在载荷的选择和搭配上较为复杂、且对平台和轨道的要求较为苛刻、数据传输量大、抗风险能力较差,但在真正实现多台仪器的共视场、与被动光学成像仪的配合最佳、卫星研制成本可控、技术相对成熟等方面仍具备不可替代的优势。微波雷达与激光雷达以及与其他传感器共平台协同观测,可实现云—气溶胶—降水的同步联合遥感,从而加深云的形成和演变、云—气溶胶—降水相互作用及其对气候系统的辐射强迫等方面的认识和理解,进一步提高天气预报和气候监测能力。
5 结语
星载主动遥感测云已经成为大气科学领域的研究热点,中国也已开展了相关层面的论证和预研。本文主要回顾了星载毫米波雷达和激光雷达测云技术及数据应用的研究现状,介绍了在云宏观结构及全球分布、云微物理特征、气溶胶的垂直结构及云与气溶胶相互作用等方面取得的突破性进展,并对CloudSat 与CALIPSO 在协同观测层面取得的成果及发展需求进行了分析,指出其在载荷性能、协同观测模式及多源数据反演和融合等方面仍待提升。结合国际上未来星载主动遥感测云的观测计划,探讨了太赫兹雷达、高光谱激光雷达、多波长和多普勒等测云新技术的应用前景,并简要分析了多星系统及单星平台协同观测新模式和轨道高度对探测性能的影响。基于国际主动遥感在测云方面所取得的成果、三维测云的需求以及国内测云技术所取得的先进水平,建议星载测云的发展在以下方面进一步加强:提升单个测云载荷的性能,如毫米波雷达空间分辨率的提高、探测灵敏度的提升等;充分利用最新的先进技术,如多波长技术、多普勒技术、太赫兹雷达等,从而得到更精确的微物理反演、速度测量等参数;发展微波雷达和激光雷达以及其他探测仪器的多传感器共平台协同观测,实现多传感器的高度时空匹配;发展多源数据融合技术,如人工智能技术和方法的应用,使得不同平台、不同体制和不同原理的探测资料有效融合,为气象和气候监测和预报提供更加完善可靠的参考数据。