分布式驱动电动汽车防侧翻控制的研究
2023-10-19赵曰贺
赵曰贺
分布式驱动电动汽车防侧翻控制的研究
赵曰贺
(江苏建筑职业技术学院 智能制造学院,江苏 徐州 221000)
相对于传统车辆,分布式驱动电动汽车自由度增多,从而稳定性下降,所以对其稳定性的研究尤为重要。文章以某分布式驱动电动汽车为对象,结合其各车轮驱动转矩可单独控制的特点,探究有效防止其侧翻的控制方法。根据车辆运动方程及车辆参数,使用Simulink建立了车辆动力学模型;针对分布式驱动电动汽车设计了基于车轮差动驱动的防侧翻控制策略,并选取典型车辆侧翻工况进行仿真实验。实验结果表明:所设计的差动驱动防侧翻策略能有效提高车辆防侧翻能力,其模糊自适应比例-积分-微分(PID)控制器能根据车辆实时运动情况给出动态指令,差动驱动控制方式则能根据控制器指令迅速有效地阻止车辆侧翻。
分布式驱动电动汽车;防侧翻控制;差动驱动
分布式驱动电动汽车的每个驱动轮内都集成有驱动电机和传动机构。相比于传统驱动方式,分布式驱动系统结构更加简洁,传动效率更高,并且可以实现对每个车轮驱动转矩的单独控制,是一种极为理想的驱动方式[1]。但分布式驱动电动汽车的自由度较传统汽车有所增加,这使其整体稳定性下降,当车辆高速过弯或路况较差时更容易发生侧翻。
国内外针对车辆防侧翻的研究主要聚焦于差动制动和主动转向两种防侧翻方式。其中差动制动防侧翻控制技术最为成熟。车身电子稳定系统(Electronic Stability Program, ESP)、主动防翻滚(Electronic Roll Mitigation, ARM)系统等安全系统皆是采用的差动制动技术。差动制动防侧翻控制是在车辆有侧翻倾向时,通过对每个车轮分配不相等的制动力,从而产生一个作用于车辆的横摆力矩,以提高车辆的稳定性防止其侧翻[2],差动制动防侧翻控制的缺点是其在实施控制时消耗了车辆的动力。
主动转向控制是一种有效的防侧翻控制方式,但其被运用得较少。主动转向防侧翻控制的缺点是其在实施控制时减小了方向盘转角,从而会改变驾驶员的驾驶意图[3]。
对于分布式驱动电动汽车,可以对每个车轮的驱动转矩单独控制,当车辆将要发生侧翻危险时,车辆可以通过差动驱动的方式来产生一个附加横摆力矩防止车辆侧翻[4]。显然,这种防侧翻控制避免了差动制动防侧翻控制和主动转向防侧翻控制带来的缺点。
1 分布式驱动电动汽车建模
1.1 整车模型
如图1、图2所示,根据车辆侧向力平衡关系得:
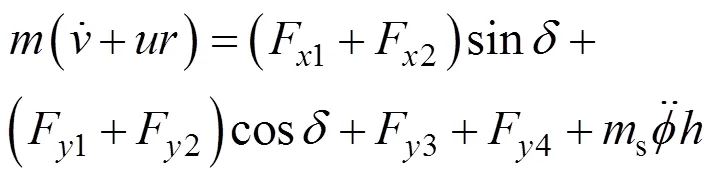
根据车辆纵向力平衡关系得:
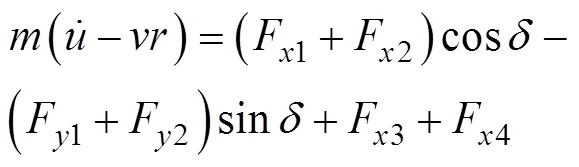
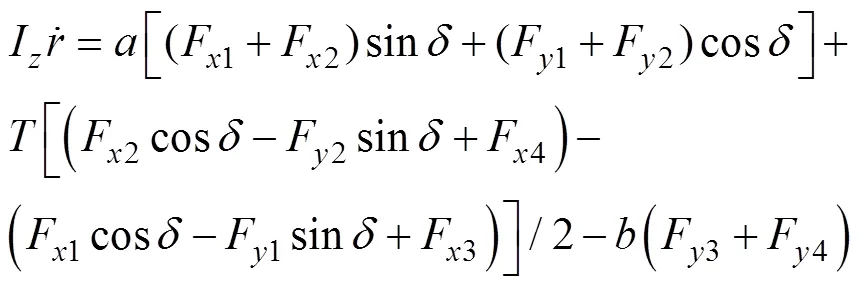
根据车辆横摆力矩平衡关系得:
根据车辆侧倾力矩平衡关系得:

式中,I、I、I分别为车辆绕其各轴的转动惯量;为车辆前轮转角;为车辆悬架等效侧倾阻尼;为车辆悬架等效侧倾刚度;其余各参量含义如图1、图2所示。
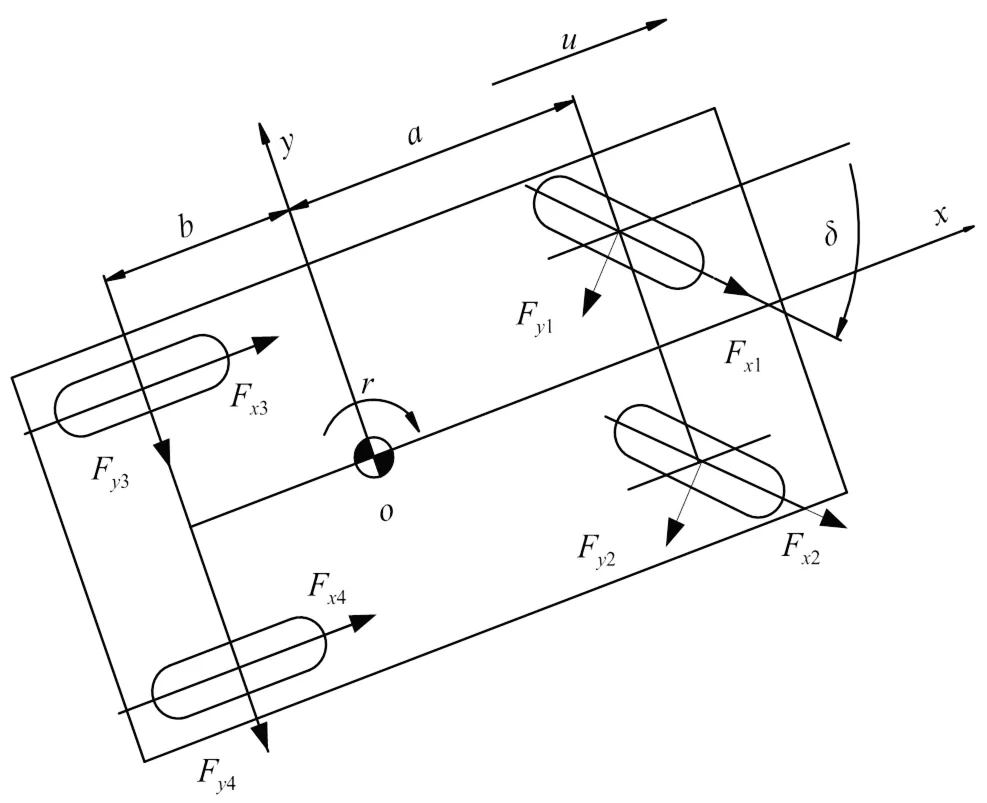
图1 车辆纵向、侧向及横摆运动模型
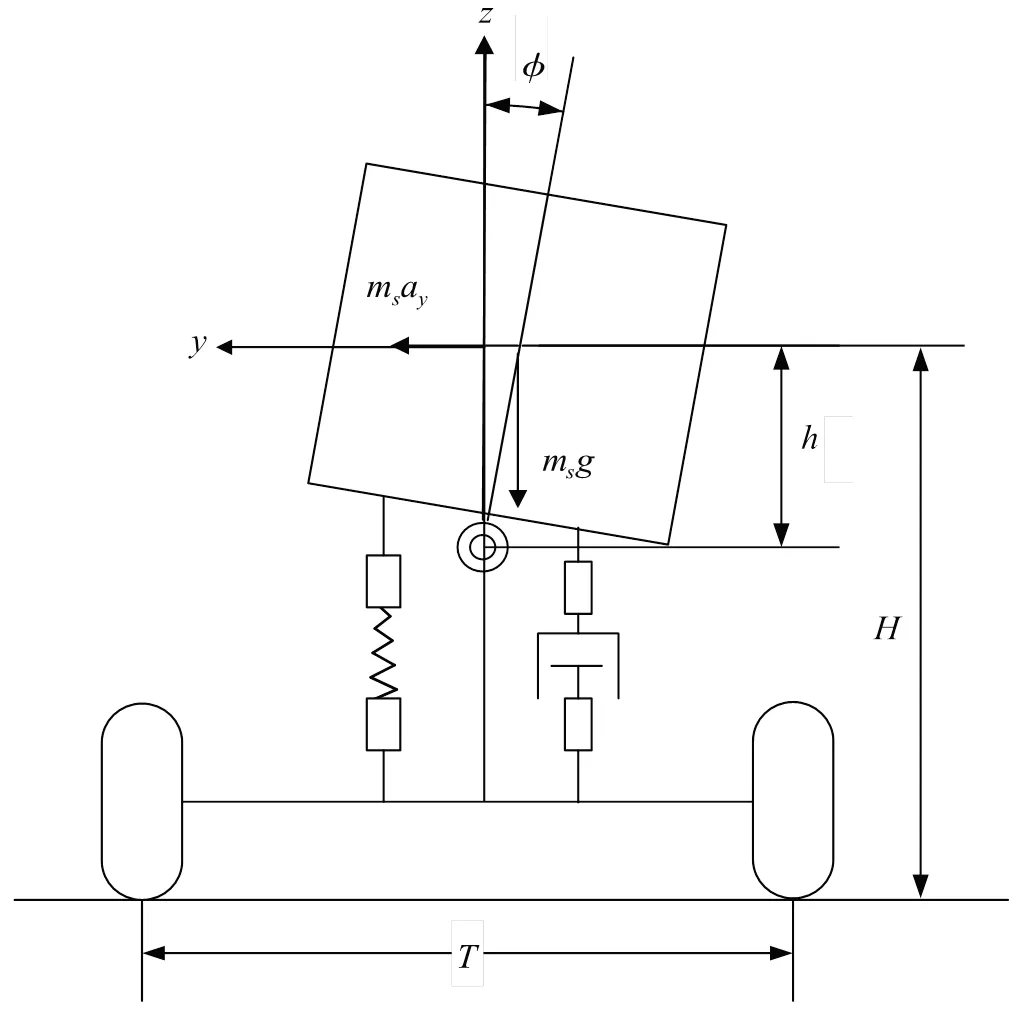
图2 车辆侧倾运动模型
1.2 车轮模型
如图3所示,分布式驱动电动汽车的车轮轮毂内部集成了驱动电机和传动机构,轮毂电机发出转矩通过传动机构传递到车轮,车轮与地面相互作用并且克服一定阻力后便产生了向前的动力。
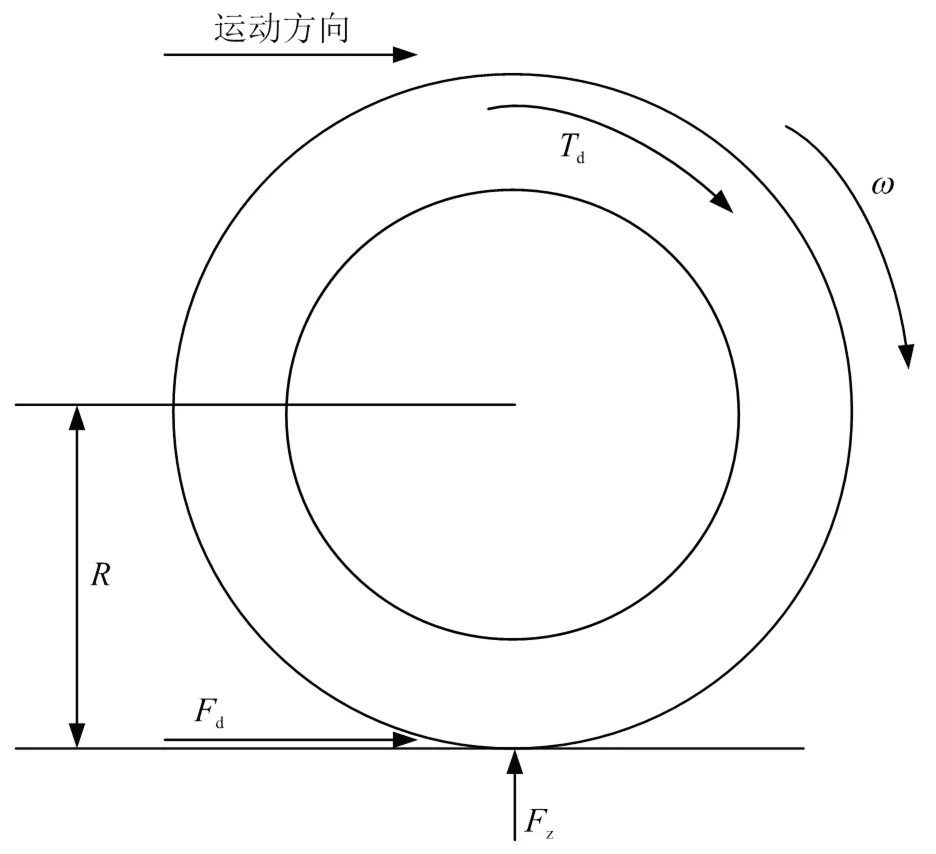
图3 车轮运动模型
四个车轮的运动方程可表述为




式中,J(=1,...,4)分别为车辆各车轮的转动惯量;di(=1,...,4)分别为车辆各车轮驱动转矩;为轮胎半径。
1.3 轮胎模型
众多科研工作者对轮胎进行了大量的研究,并且定义了多种轮胎模型。基于本文所研究的工况中车轮的侧偏量和纵滑量都较小,因此,可以选择线性轮胎模型。轮胎模型表述如下:
式中,s为轮胎纵滑刚度;β为轮胎侧偏刚度;s(=1,...,4)为各车轮的纵向滑移率;β(=1,...,4)为各车轮的侧偏角。
另外,由车辆动力学得:


根据以上运动方程,使用Simulink搭建某分布式驱动电动汽车模型,如图4所示。

图4 分布式驱动电动汽车动力学模型
1.4 车辆参数
某分布式驱动电动汽车基本参数如表1所示。
表1 某分布式驱动电动汽车基本参数
参数名称参数值参数名称参数值 整车质量m/kg1 434横摆转动惯量Iz/(kg•m2)1 343 簧载质量ms/kg1 134侧倾转动惯量Ix/(kg•m2)440 前轴到质心的距离a/m1.04后轴到质心的距离b/m1.56 轴距L/m2.6侧倾臂长h/m0.5 轮距T/m1.8重心高度H/m0.7 侧倾刚度系数k/(N•m/rad)7 600侧倾阻尼系数C/(N•m•s /rad)4 000
2 防侧翻控制
2.1 侧翻指标
本文选用横向转移率(Lateral Transfer Rate, LTR)作为车辆的侧翻指标,LTR是通过车辆转弯过程中两侧车轮承担的载荷情况来判断车辆有无侧翻危险,其计算方法直接有效且适用于多数侧翻情况[5],其表达式如下:
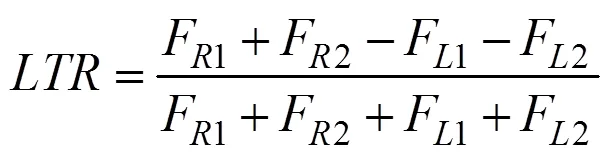
由式(13)可知,当两侧车轮平均分担车辆载荷时,LTR值为0,这表明车辆无侧翻危险;当一侧车轮承担全部载荷,而另一侧车轮已经脱离地面,载荷为零时,LTR值为1或−1,这表明车辆正在或已经发生侧翻。所以,LTR的绝对值越接近1则表明车辆发生侧翻的危险性越大,那么防侧翻控制的目标就成了控制使LTR的绝对值小于1。
2.2 控制策略
分布式驱动电动汽车的每个车轮内部集成了驱动电机,可以实现对每个车轮驱动转矩的单独控制。基于这个条件,在实施防侧翻控制时,可以对每个车轮施加不同的驱动转矩,从而产生一个作用于整车的横摆力矩来改变其横摆角速度,继而改善车辆侧倾运动防止侧翻。
当车辆有侧翻倾向时,在不同的工况下其LTR值及LTR增长率的变化形式都是不可预测的。为了确保车辆在任何情况下都得到最合适的防侧翻控制效果,本文使用模糊自适应比例-积分-微分(Proportional Integral Derivative, PID)控制器作为车辆防侧翻的控制器。如图5所示,模糊自适应PID控制器含有模糊控制器和PID控制器,其中PID控制器可以对实际量与参考量的误差值进行有效的控制,但当误差值不断变化时,PID控制器无法应变。模糊控制器则可以根据LTR误差值及其导数E的变化情况来实时调整PID控制器的三个参数P、I和D,从而弥补PID控制器的缺陷。模糊自适应PID控制器综合了PID控制器稳态性和精度高的优点以及模糊控制器智能性和鲁棒性的特点,是一种非常实用的控制器[6]。
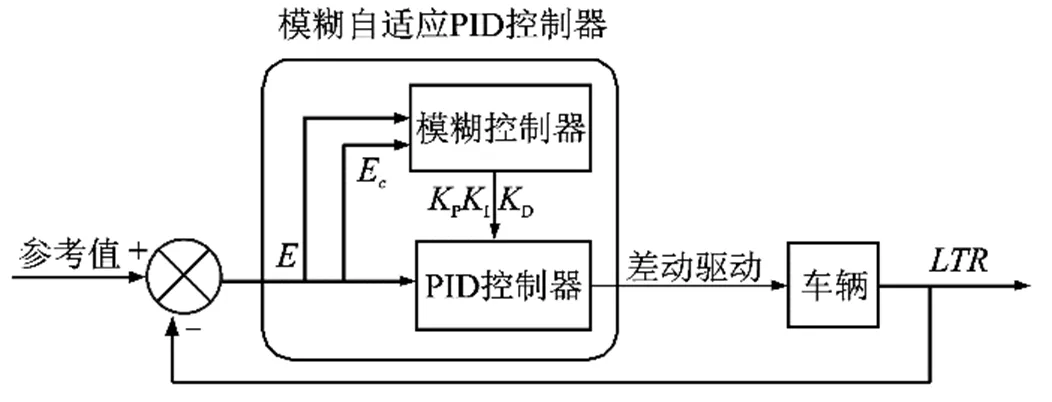
图5 模糊自适应PID控制器
当系统检测到车辆LTR绝对值小于0.4时,说明车辆没有侧翻危险,控制器不对车辆实施防侧翻控制;而当车辆LTR绝对值大于0.4时,则认为车辆有发生侧翻的危险,此时,控制器开始对车辆实施防侧翻控制。实施控制时,模糊PID自适应控制器根据LTR值及其变化率的大小实时调整自身各参数,从而计算出动态的控制量。控制量的输出形式为增加或减少各车轮的驱动转矩(保持车辆总驱动转矩不变的情况下,增加转弯内侧两车轮的驱动转矩,减少外侧两车轮的转矩)。显然在这种车轮差动驱动的形式下,车辆获得了一个横摆力矩,从而其横摆角速度降低,其侧翻倾向也随之减小。
3 仿真分析
本文选用J-Turn工况和双移线工况来研究车辆的侧翻运动及验证控制器对车辆的防侧翻效果。J-Turn工况:车辆在某一速度直线行驶时,将转向角突变为某一固定值,车辆由直线行驶变为转弯行驶。在J-Turn工况下可以充分反映车辆从接收到车轮转角信号到车辆达到最终稳态响应的运动状态,从而可以直观对比车辆在施加侧翻控制时与不控制时的侧翻情况。双移线工况:车辆直线行驶时,突然变道行驶,最后再回到原车道。双移线工况变化较为复杂可以用来测试所设计的控制器的动态性能。
J-Turn工况1:车辆以95 km/h的速度匀速行驶,在1 s时刻对车辆前轮施加5°的转向角,仿真结果如图6所示。
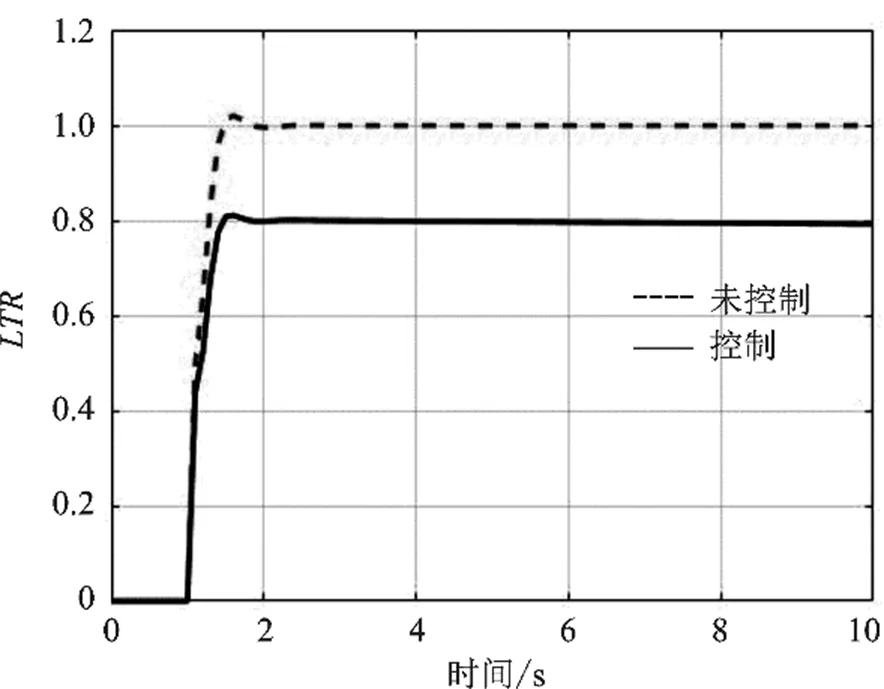
图6 J-Turn工况1仿真结果
图6中虚线为不施加控制的情况,其LTR值超过了1,说明该车辆发生了侧翻;同样的条件下,施加了控制的车辆其LTR值始终小于1,车辆没有发生侧翻。这说明所设计的防侧翻控制策略能有效防止车辆发生侧翻。
J-Turn工况2:车辆以105 km/h的速度匀速行驶,在1 s时刻对车辆前轮施加5°的转向角。仿真结果如图7所示。
J-Turn工况3:车辆以95 km/h的速度匀速行驶,在1 s时刻对车辆前轮施加6°的转向角。仿真结果如图8所示。
由上述两个仿真情况可知,在大幅度改变了车辆的车速或转向角的情况下,对于不施加控制的车辆,其LTR值达到了1.2,车辆严重侧翻;而在模糊自适应PID控制器控制作用下的车辆,两者的LTR值皆维持在1以下。这表明本文所设计的模糊自适应PID控制器有着很强的鲁棒性,可以根据实际情况的变化智能调整自身的控制强度。
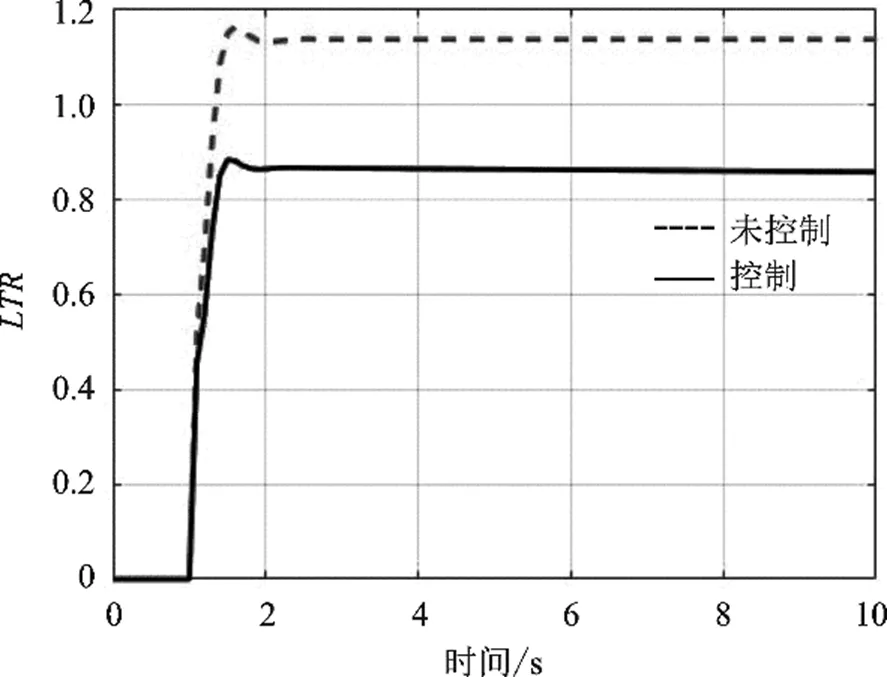
图7 J-Turn工况2仿真结果
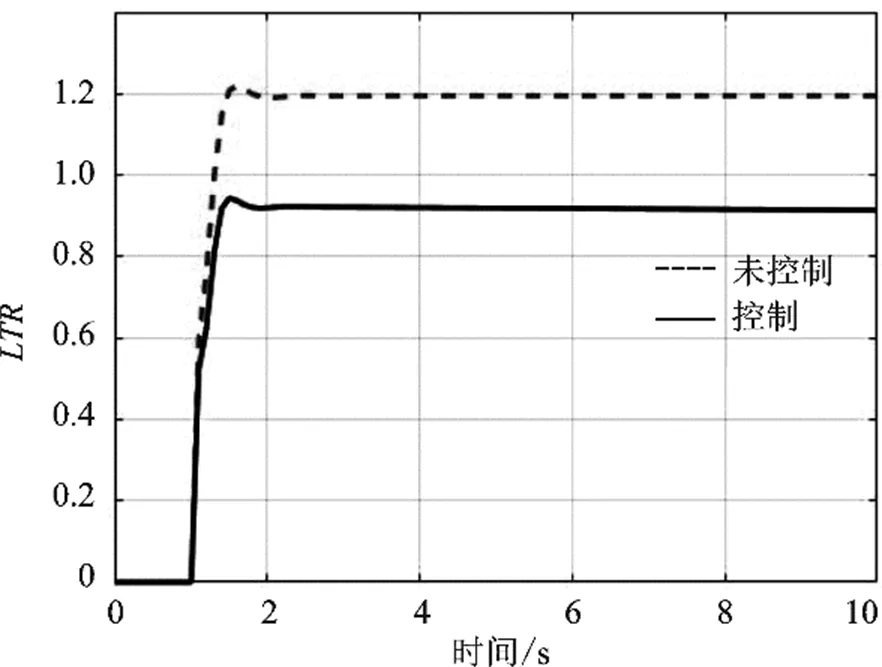
图8 J-Turn工况3仿真结果
双移线工况:车辆以95 km/h的速度匀速行驶,车辆前轮转角变化如图9所示。
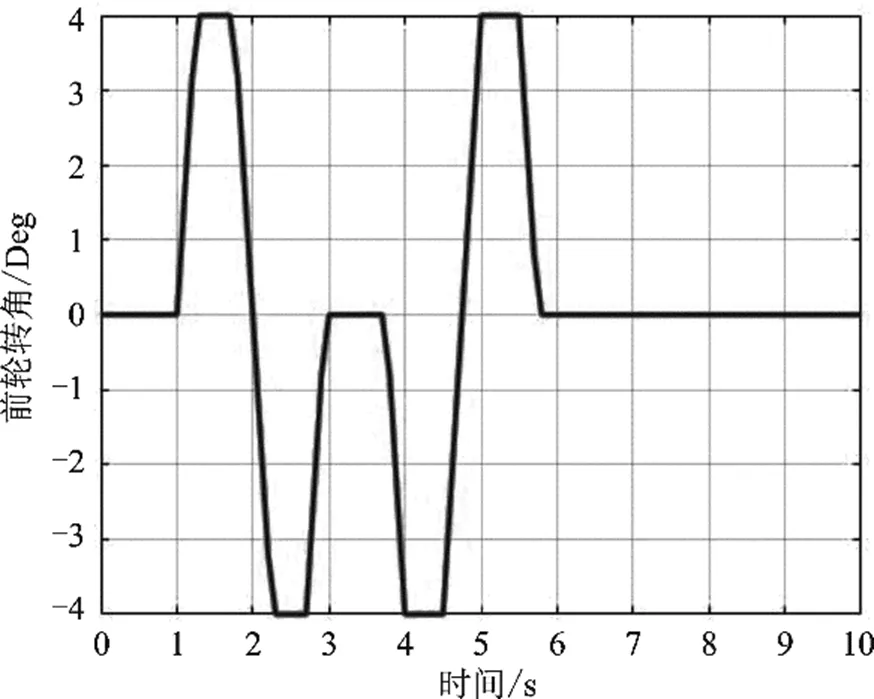
图9 双移线工况
从图10可以看出,在双移线工况中,车辆行驶状态变化较为频繁,然而在车辆LTR值升高时,所设计的模糊自适应PID控制器能立刻做出对应的控制反映,体现了控制器良好的动态性能;同时也说明了差动驱动控制方式在动作时可以迅速地改善车辆侧向稳定性。
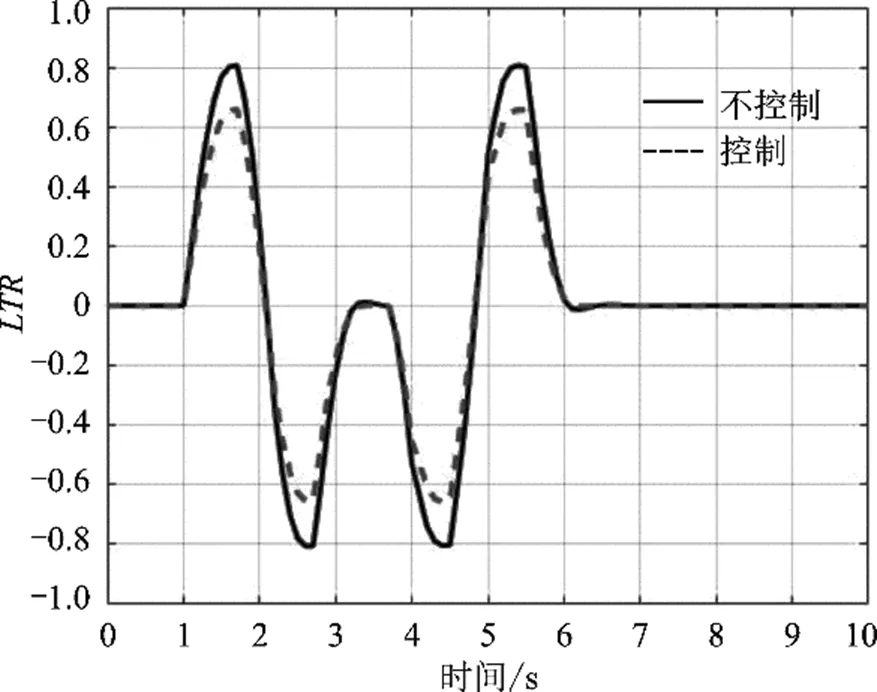
图10 双移线工况仿真结果
4 总结
本文结合分布式驱动电动汽车四轮分控的特点,设计了基于差动驱动的防侧翻控制策略,并选取典型车辆侧翻工况进行仿真实验。仿真结果表明:
1)车辆在不同车速及不同前轮转角的条件下,施加控制车辆均比不施加控制车辆的LTR值改善20%以上。证明了差动驱动的控制方式及模糊自适应PID控制器的有效性;
2)在双移线工况仿真测试下,车辆行驶状态变化频繁却始终能获得良好的控制效果。证明了模糊自适应PID控制器拥有良好的动态性能,也体现了差动驱动的控制方式的迅捷性。
[1] 熊璐,傅稳.分布式驱动电动汽车构型综述[J].中国新技术新产品,2014(22):84-85.
[2] 石求军,李静.基于非线性扰动估计的客车防侧翻控制[J].汽车工程,2020,42(9):1224-1231,1239.
[3] 寇胜伟.基于差动制动的商用车防侧翻控制研究[D].长沙:湖南大学,2017.
[4] 张利鹏,任晨辉,李韶华.轮毂电机驱动汽车侧向稳定性底盘协同控制[J].机械工程学报,2019,55(22):153- 164.
[5] 余伟,高伟,冯樱.基于模糊控制的差动制动客车防侧翻控制[J].汽车实用技术,2021,46(13):30-34.
[6] 冯艳红,唐岚,陈林彬,等.基于ESP的模糊PID和PID控制策略对比[J].汽车实用技术,2022,47(17):109- 112.
Research on Anti-roll Control of Distributed Drive Electric Vehicle
ZHAO Yuehe
( School of Intelligent Manufacturing, Jiangsu Vocational Institute of Architectural Technology, Xuzhou 221000, China )
Compared with traditional vehicles, the degree of freedom of distributed drive electric vehicles increases, and the stability decreases, so the research on its stability is particularly important. This paper takes a distributed drive electric vehicle as an object, and explores effective control methods to prevent rollover based on the characteristics of each wheel drive torque that can be individually controlled.According to the vehicle motion equation and vehicle parameters, the vehicle dynamics model is established using Simulink; A rollover prevention control strategy based on wheel differential drive is designed, and the typical vehicle rollover conditions are selected for simulation experiments. The experimental results show that the designed differential drive anti-rollover strategy can effectively improve the anti-rollover ability of the vehicle,its fuzzy adaptive proportional-integral-derivative(PID) controller can give dynamic instructions according to the real-time motion of the vehicle, and the differential drive control mode can quickly and effectively prevent the vehicle from rollover according to the controller instructions.
Distributed drive electric vehicle; Anti-roll control; Differential drive
U461.91
A
1671-7988(2023)19-34-05
10.16638/j.cnki.1671-7988.2023.019.007
赵曰贺(1989-),男,硕士,助教,研究方向为分布式驱动电动汽车转矩优化控制,E-mail:1183988393@qq.com。
