一种基于无人机倾斜摄影技术的机场净空障碍物测量方法
2023-10-18高钊
高 钊
(自然资源部第一大地测量队,陕西 西安)
引言
机场一般为了保障飞机起降安全,防止机场周围有超高度的目标影响机场安全运行,划定机场及其周围地貌、地物高度不能超过限制高度的空间区域称为机场净空。依据《民用机场飞行区技术标准》,人为规定了几种机场净空障碍物限制面, 净空范围内的障碍物不能超过各限制面的高度。详细准确测量净空区内障碍物坐标和高度信息,判定对机场飞行安全的影响,具有重要意义。由于机场净空范围一般都比较大,障碍物测量难点在于障碍物限制面范围的确定,判断测量目标是否构成障碍物,以及障碍物数量较多容易漏测等问题。
传统测量方法一般采用GPS-RTK+全站仪的外业测量方法,该方法需要外业人员到达每个障碍物跟前测量,比较费时费力,容易漏测目标。笔者根据参与的西北某规划机场障碍物测量项目,提出一种基于无人机倾斜摄影测量的内外业相结合的障碍物测量方法,大大提高了障碍物测量工作效率,同时也很好的提高了障碍物识别和测量精度,取得了良好的效果。
1 净空障碍物测量方案设计
本文采用的净空障碍物测量方法主要首先通过对拟建机场实地踏勘,收集基础按制资料;做好飞行航线设计,像按布设后,进行无人机倾斜摄影,构建高精度三维模型,获取机场范围高清正射影像、数字高程模型DEM 和数字表面模型DSM。根据《民用机场飞行区技术标准》中对不同等级机场障碍物各限制面的规定制作净空区障碍物参考面模型,通过该模型和DSM 叠加计算筛选出超出障碍物面的矢量范围,并利用正射影像内业目视判读标记疑似障碍物,然后外业进行重点核查测量,最后再通过内业反算得出障碍物高度。方案流程如图1 所示。
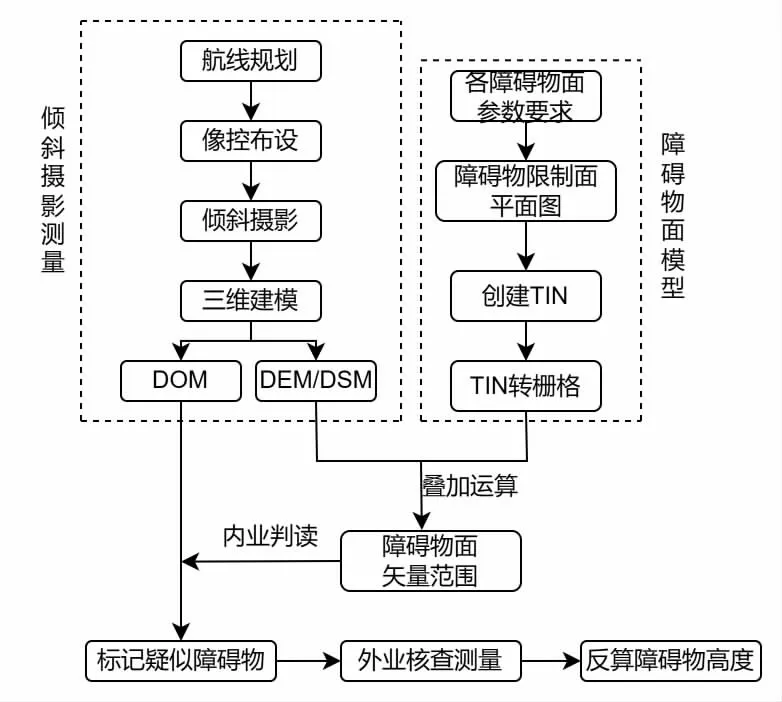
图1 净空障碍物测量方案流程
2 无人机倾斜摄影
通过无人机倾斜摄影技术构建机场范围高精度三维模型,可以一次性获取机场高清正射影像、数字高程模型DEM 和数字表面模型DSM。
2.1 航线规划
首先对目标机场进行实地踏勘并收集完基础按制资料后,可以根据机场地形、构筑物等情况,确定飞行平台和传感器和航摄参数,并进行航线规划。
2.2 像按布设
根据规划好的航线,每隔250 m 左右均匀布设L型靶标。点位尽量选在地势平坦、视野开阔、图上易于识别、不易破坏处。布设时在土质松软的地方可以均匀布设L 型灰标,在公路等硬化地面可直接刷涂L 型白色漆标。
2.3 倾斜摄影飞行
倾斜摄影飞行时间一般选择在白天光线条件好,目标阴影小时段,大概10:00~15:00 左右,通过五镜头或三镜头传感器获取多角度影像。
2.4 高精度三维建模
飞行获取高清影像和pos 数据后,导入三维建模软件通过联合平差和多视影像匹配技术完成空三加密,并根据像按成果进行按制点刺点,生成高精度的密集点云和三角网,通过纹理映射方式最终生成三维模型以及DSM、DOM、DEM 等产品。
3 机场障碍物限制面模型制作及范围提取
3.1 障碍物限制面要求
以西北某拟建设机场为例,障碍物限制面由两大部分组成,第一部分为净空障碍物面,包括内水平面、锥形面、进近面、内进近面、过渡面、内过渡面、复飞面、起飞爬升面等共八个障碍物限制面。第二部分以机场中心为圆心,净空障碍物面范围外、半径10 km范围内,高出原地面15 m 且高出就近跑道入口标高40 m 的人工障碍物,见图2。
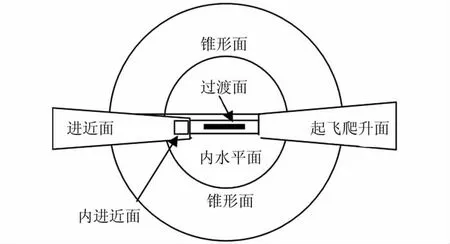
图2 障碍物限制面平面示意
3.2 障碍物限制面模型绘制及范围提取
第一部分净空障碍物面范围提取首先根据《民用机场飞行区技术标准》中对障碍物各限制面的规定,以及机场对应飞行区指标尺寸和坡度的要求,以提供的机场中心点2000 坐标、跑道方向为基准,绘制净空障碍物面的平面位置图。具体各障碍物限制面的指标要求按表1 飞行区指标Ⅰ类执行。

表1 障碍物限制面的尺寸和坡度
绘制完各个障碍物面的平面位置图后,根据每个障碍物面对应位置高程构建TIN 模型,再运用线性插值法,设置采样距离将TIN 转换成栅格图形,即得到各障碍物面的立体模型,将倾斜摄影得到的高精度数字高程模型DEM、数字表面模型DSM 和每个障碍物面的栅格图形进行内插运算,提取出高于净空障碍物面的障碍物矢量范围。
第二部分净空障碍物面范围外、半径10 km 范围内的障碍物面范围提取方法同第一部分类似,将超过机场入口标高40 m 高的障碍物面同已有DSM 叠加,筛选出高于障碍物面的范围。
4 障碍物判定及测量
4.1 影像上判读疑似障碍物,标记位置属性
将筛选出的障碍物面矢量范围叠加在已有高清影像上,通过目视判读初步筛选出范围内高压线塔、通信塔、微波塔、水塔、烟囱、桥梁等疑似障碍物(超过第一部分障碍物限制面的所有地物,超过第二部分障碍物限制面的人工地物)等障碍物,并进行标记,内业初步判定地物属性。
4.2 外业现场调查与测量
(1) 将内业初步筛选标记出的疑似障碍物在图中进行标注,打印工作用图,外业逐一进行排查,确认其属性并进行位置和高度测量。
(2) 对于距离观测台(站)较远障碍物,全站仪无棱镜无法测量(建筑物一般40 m 以内、树木一般150 m 以内)的情况,实地选择地形高点,视野开阔,目视障碍物较多处架站,采用RTK 布设图根按制点和全站仪依次观测障碍物的水平方位角和垂直角,现场记录准确各障碍物属性和角度值。
(3) 外业应对覆盖范围进行全面的一次排查,对内业影像上无法分析得出(例如点状的高压线塔、通信杆、低压杆等地物)或新建设地物进行现场补调、标注和测量。
4.3 内业验证,计算障碍物高程值
内业根据测量障碍物的方位角以及测站坐标,在CAD 展出以测站为起点的射线叠加在影像图上,在影像图上根据射线方向标注目标障碍物,根据目标障碍物标注点坐标获取地物到台(站)址的距离,并通过垂直角计算其高程信息,得到障碍物高度。由于计算得出的障碍物高度是大地高,还需要经过似大地水准面精化成果转换成85 正常高。
4.4 剔除不合理点
(1) 将障碍物坐标展到DEM 上做空间提取分析,得到障碍物点对应在DEM 上高程值,将计算得到的障碍物高程值和对应的DEM 高程值做差,统计高差值,剔除掉高差明显不合理点。
(2) 外业架站测量障碍物时各站存在测量障碍物交叉重合点,统计出重合点信息,并对比不同站测得高程值,互相检验测量值,剔除误差大点。
5 成果及精度检验
根据外业测量障碍物的方位角及测站坐标,结合影像图分析得到准确的障碍物位置、高度信息,或直接根据外业测量数据统计得到障碍物准确位置和高度信息,制作障碍物测量成果表。西北某机场测共测量障碍物成果点748 个。在成果表上标明每个障碍物的编号、性质、真北方位、距离、坐标和高程等信息,成果及精度指标见表2。
对所测障碍物结果进行精度检核,采用全站仪实测部分障碍物位置和高度,统计分析平面位置和高程精度如下:
净空障碍物限制面范围内障碍物测量检核精度:共统计40 点,平面位置中误差为0.279 m,高程中误差为0.188 m。
净空障碍物限制面范围外、10 Km 半径范围内障碍物测量检核精度:共统计43 点,平面位置中误差为2.948 m,高程中误差为1.769 m 均满足规范和设计要求。最终障碍物测量成果统计如表3 所示。
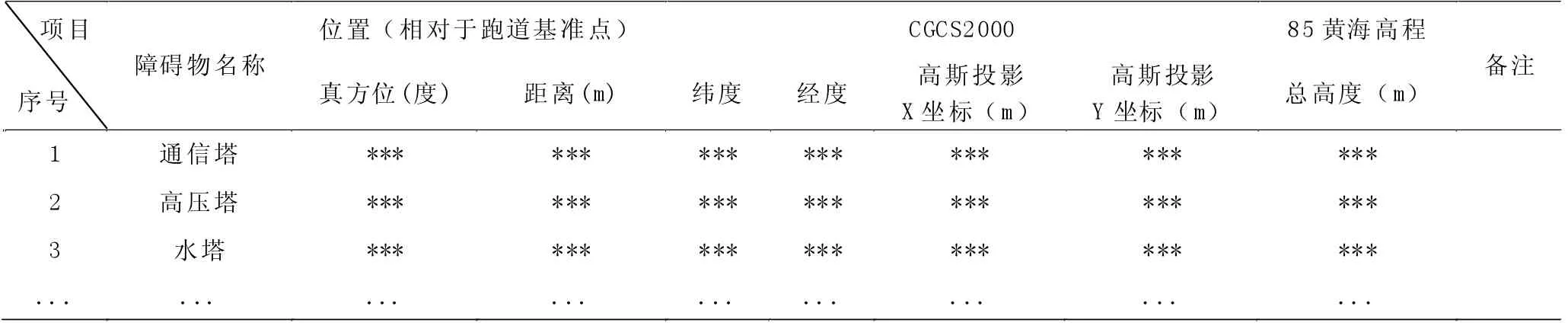
表3 障碍物测量成果统计
6 结论
本文采取的机场净空障碍物测量方法将三维建模新方法与传统测绘法相结合,减少了外业工作量,在保证测量精度的同时提高了测绘效率,具体优势主要有以下几方面:
(1) 完成绘制的机场净空限制面数学模型为之后不同等级机场净空测绘相关工作积累了一定的资料和经验,为再开展类似工作打好了基础。
(2) 验证了内业判读-外业测量-内业反算测量净空障碍物方法的可行性和精度,尤其针对本项目机场场址选在山区,障碍物数量较大,测量条件复杂不易到达的情况下,该方法相比传统RTK+全站仪测量的外业方法更具有优势,减少了大量外业工作,极大提高了测量效率。
