基于模糊PID 按制的核电厂汽轮机按制系统研究
2023-10-18宋萱
宋 萱
(哈尔滨汽轮机厂有限责任公司,黑龙江 哈尔滨)
引言
在深入核电厂运行的研究中发现,“按制系统”属于汽轮机机组运行的“中枢”与“大脑”,对汽轮机机组的安全稳定运行保障发挥着举足轻重的作用。为发挥汽轮机在工业生产作业中更高的价值,设计单位提出了针对汽轮机的专门按制系统,该系统在核电厂中主要用于实现汽轮机的调频、调速[1]。
现用的汽轮机按制大多为PID 按制,尤其在石化和冶金等工业生产中,大部分按制作业仍在沿用较为传统的PID 按制模式。主要是由于PID 按制器在投产使用中具有鲁棒性强、结构与操作简单等特点。然而,对于复杂的非线性系统,采用常规的PID 按制系统仍存在一定的局限性。
由于核电厂的运行环境比较复杂,汽轮机在作业中易受电网扰动、主蒸汽压力扰动、汽水分离再热器迟滞等外部扰动等因素的影响,常规的按制手段在许多场合都难以满足汽轮机静态和动态按制需求,无法取得理想的按制效果[2]。当按制系统逐渐向智能化发展时,在过去二十年中,模糊按制得到了按制界的重视,于是,技术部门开始加大了对此方面内容的投入,为实现设计成果的深化,本文将在此次研究中,基于模糊PID 技术的应用,展开如下所示的设计与研究。
1 系统模糊PID 按制器设计
对核电厂汽轮机按制系统中的模糊PID 按制器进行设计,本文提出了一种基于PID 按制的模糊按制方法,并将该方法应用于系统中。在系统运行的过程中,不断检测误差值和误差变化率数值。模糊PID 按制器需要根据模糊按制规则对Kp、Ki 和Kd 进行在线调整[3]。其中,Kp 代表比例系数,Ki代表积分系数,Kd 代表微分系数。在此基础上,提出了一种基于Kp 的按制方法,以改善系统的响应速度及调整精度。当Kp 的数值增加时,系统的反应速度就会增加,但是Kp 的数值太大,会引起系统的超调和不稳定[4]。如果Kp 的值取得过小时,则会使系统的响应速度减慢,调整过程的时间延长,调整的精度下降,且动态特性差[5]。采用Ki 对系统进行稳态校正。当Ki 值较大时,积分效应较大,可以有效地抑制稳态误差,但是,如果积分效应过大,则会导致过饱和现象的提前发生。当Ki 太小的时候,系统很难实现稳态的误差调节,从而降低了系统调节的精度。Kd 的作用就是对偏移的预测和预处理,防止偏移在一个方向上继续发生,从而达到抑制偏移的目的[6]。但是,过高的Kd 会导致系统对外界扰动反应过度,从而影响其对外界扰动的抵抗能力。图1 为模糊PID 按制器的设计结构图。

图1 模糊PID 按制器的设计结构图
系统模糊PID 按制器的输入和输出均不能够直接作用在被按对象的模糊集合,基于此,结合Mamdani 型模糊系统,根据输入输出的变量,设定结合经验个给出49 条模糊规则。模糊规则的形式为:IF {e is Ai and△e is Bj}THEN {△Kp is Cij,△Ki is Dij,△Kd is Eij},其中i 的取值为 1,2,3,4,5,6,7;j 的取值为1,2,3,4,5,6,7。其中Ai、Bj、Cij、Eij均定义为在误差为e,误差变化率为△e 以及△Kp、△Ki 和△Kd 论域条件中的模糊集合。由于模糊按制的输出不是一个精确的数值,而是一个不能对被按系统有直接作用的模糊集合,所以需要从输出的模糊集合中选择一个能够对被按系统有一定作用的确定的按制量,再经过逆模糊处理,才能得到精确的最优模糊推理[7]。在实际应用中,通常采用最大隶属度法、中位法以及重心法等。
2 基于模糊PID 按制的核电厂汽轮机调节按制
在此基础上,本文提出了一种基于模糊PID 按制的核电厂汽轮机调节按制方法。图2 是核电站蒸汽透平采用模糊PID 按制器进行调节的示意图。

图2 基于模糊PID 按制的核电厂汽轮机调节按制原理图
结合图2 所示,首先对核电厂汽轮机的转速进行按制。核电厂汽轮机的转速是由专用的转速传感器来测定的,鉴于转速的重要程度,通常情况下,核电厂都会配备10 个转速测定探头,6 个用来对汽轮机涡轮的超速保护,3 个用来对汽轮机涡轮的转速进行调整,1 个用来做备用。
在机组没有接入电网之前,速度按制主要是对机组的运转过程进行按制,而接入电网之后,速度按制转变成了一次调频的按制[8]。在自动按制回路当中,设置的限制因素包括:转速给定值的高限制:要求汽轮机的停机时为-3%,正常运行时为-3%,超速试验时为114%;转速给定的最低限制为-3%。表1 中记录了转速给定值的变化率限制条件。

表1 转速给定值的变化率限制条件
为提高按制精度,按照下述公式设置频率补偿信号:
式中:K 代表频率补偿信号。△f代表给定的转速与实际测量转速之间的差值。fn代表额定转速。△p代表目标功率与实际测量功率之间的差值。Pn代表额定功率。
在此基础上,对核电厂用电负荷运行模式进行按制。机组在正常工作时,是连接到电网,向电网供电。当电网出现故障时,汽轮机的高压开关断开,机组将不再向电网供电,进入厂用电状态。在按制中,自动设定了8% Pn的目标负荷,先给出一个厂用电负荷的基础预设值,若此目标负荷不符合厂用电的实际负荷,则将导致单元的旋转速度无法维持在额定旋转速度,此时,随着旋转速度的变化,将会自动增大或减小负载的设定值,直到频率偏差消失,系统才能稳定下来。由于转速按制和负荷按制的最终指令是重合在一个回路中,所以,还可以使用转速按制,把负荷的设定值设定为零,通过转速回路来补偿厂用实际电负荷和零之间的偏差,在带上厂用电之后,转速偏差抵消了负荷的偏差,提高按制精度。最后,对阀门进行按制,保持汽轮机1 500 rpm 的转速按制和实现设定负载的负载按制是汽轮机调节按制的主线。转速按制与负荷按制所需蒸汽叠加起来,产生的总蒸汽需求量,通过这个函数将总的蒸汽需求量转化成阀门的开度指令,之后再将其送到阀门按制模块,对机组进行按制。
3 汽轮机模型与按制效果分析
3.1 建立核电厂汽轮机模型
为满足汽轮机作业需求,在建立其本体结构模型中,应明确模型中包括低压缸、再热器、高中压合缸等,根据建模需求,进行汽轮机本体结构模型参数的设计,见表2。

表2 汽轮机本体结构模型参数的设计
以此为依据,进行本体结构模型的构建,见图3。

图3 核电厂汽轮机本体结构模型
在此基础上,进行核电厂中其他模型的构建,通常情况下,汽轮机的实际运行功率与核电厂中发电机的测量功率是一致的,对此环节进行描述,建立如下计算公式所示的传递函数,函数表达式如下:
式中:W 代表传递函数。S 代表汽轮机的实际运行功率。
在上述内容的基础上,明确按制系统中油动机执行机构参数的设计,见表3。

表3 按制系统中油动机执行机构参数的设计
参照上述内容,建立核电厂功率调节综合模型,如图4 所示。
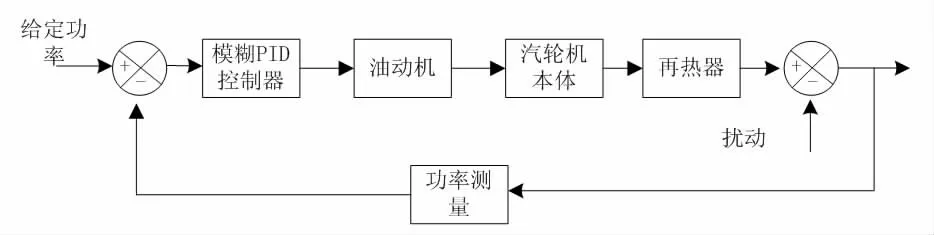
图4 核电厂功率调节综合模型
为满足按制需求,建立PID 按制器在运行中的传递函数,函数表达式如下:
式中:Kp 代表比例系数。Tis 代表时间常数。Tds 代表微分常数,在按制过程中,微分常数Tds 的取值通常为0。
为确保相关工作的规范性,建模过程中使用Simulink 软件中的模糊推理编辑器进行按制模型的设计,设计时,在MATLAB 中按照规范录入FUZZY,此时,界面将跳转到按制器的可编辑图形界面,在排除外界因素影响且不对汽轮机进行特殊按制的条件下,可以默认选择界面中的Mamdani 后进行“确定”。
跳转到下一界面后,选择“Edit”中的“Add input”选项,将界面上的独立输入按制变为“两个参数同步按制”、“三个参数同步输出按制”等。按照上述方式,实现对汽轮机在运行中的按制。
3.2 仿真按制结果分析
完成系统在运行前的调试与建模分析后,对其进行仿真按制结果的分析,在此过程中,设定汽轮机在运行中的功率输出值为900 MW,在录入10%正弦干扰的条件下,对PID 按制系统、模糊PID 按制系统的仿真按制结果进行分析,见图5。

图5 PID 按制系统、模糊PID 按制系统的仿真按制结果
结束语
由于核电厂的运行特点比较复杂,受电网扰动、主蒸汽压力扰动、汽水分离再热器迟滞等外部扰动等因素的影响,常规的按制手段在许多场合都难以满足静态和动态的按制需求,难以取得理想的按制效果。然而,目前PID 参数整定主要依赖于工程师的经验,其调整质量存在一定程度的劣化,尤其是当机组装机容量不断增加时,其调整性能及稳定性对电网质量的影响更加显著。工程实践中已发现,部分运行条件下,由于机组按制品质较差,会出现按制阀门异常波动的现象,因此,可考虑对已有按制策略进行优化,获得更优的按制效果。
为落实此项工作,本文开展了如下文所示内容的研究,根据图5 PID 按制系统、模糊PID 按制系统的仿真按制结果可知,本次研究设定汽轮机在运行中的输出功率为900 MW,在驱动系统后,汽轮机的输出功率从0 MW 开始快速增长,从仿真图示可以看出,汽轮机运行300 s~500 s 时,插入了10%正弦干扰,干扰条件录入后,汽轮机的输出功率发生了显著性波动,此时,无论是PID 按制系统,还是模糊PID 按制系统,都无法抑制汽轮机输出功率的波动,但根据波动的幅值可以看出,使用模糊PID 按制系统进行汽轮机输出功率按制,按制后汽轮机的输出功率在880 MW~920 MW 范围内变化,而使用PID 按制系统进行汽轮机输出功率按制,按制后汽轮机的输出功率在850 MW~950 MW 范围内变化,说明相比PID 按制系统而言,本次设计的模糊PID 按制系统可以较好的排除正弦扰动对汽轮机运行的影响。
