无人机低空下的目标识别与跟踪系统设计
2023-10-17夏小雨韩成浩
夏小雨 韩成浩
(吉林建筑大学电气与计算机学院)
0 引言
无人机(Unmanned Aerial Vehicle)是指能够连续飞行并配有数据处理系统、通信系统和自动控制系统的飞行器。无人机越来越小,越来越稳定,越来越智能。目前,无人机广泛应用于军事领域,如战场环境下的监视、目标攻击、电子干扰等;民用领域,如农业工作、紧急搜救、高速运输等。无人机目标跟踪,首先利用机载摄像头拍摄目标,将其传输到视觉处理器中。然后根据目标跟踪算法把跟踪命令发送到无人机系统,最后无人机执行跟踪任务。其中,目标检测与跟踪研究对于无人机自主飞行与快速跟踪目标具有非常高的应用价值,成为众多研究人员的热点研究方向。无人机的跟踪目标流程图如图1 所示。

图1 无人机跟踪目标流程图
1 系统的总体设计
无人机目标跟踪系统主要分为硬件与软件模块。系统是由四旋翼无人机、图像处理系统、地面站上位机构成。四旋翼无人机是由飞行控制模块、GPS 模块、视觉处理系统、摄像头、无人机动力系统等组成。四旋翼无人机通过摄像头捕捉目标的图像,经过图像分析与处理、中央处理器对目标的识别与跟踪的算法解析,通过地面站发出跟踪指令,利用图像处理系统与中央处理器的跟踪算法,飞行控制模块控制四旋翼无人机识别跟踪目标体,四旋翼无人机目标识别定位与跟踪系统的整体构造示意图如图2 所示。其中包括三大模块,即飞行器模块、传输模块以及地面站模块。

图2 整体构造示意图
2 系统的硬件设计
2.1 硬件总体设计
四旋翼无人机的硬件设备大部分都集中在飞行控制板中,飞行控制系统集中在主控芯片上,该芯片的接收传感器获取的数据,通过控制算法计算调整无刷电机的转速,实现无人机飞行姿态的控制。硬件系统主要包括飞行控制器模块、遥控与动力套件以及图像采集与处理硬件等。
2.2 飞行控制器模块
飞行控制器的选择决定无人机飞行控制的能力。本文选用Pixhawk 飞控,Pixhawk 是一款运算处理能力强大的飞行控制器,拥有两个处理器,一个有强大运算处理能力的处理器,另外一个是用于工业的协助处理器,它的特点就是安全稳定。Pixhawk 的外观结构图如图3 所示。

图3 Pixhawk 外观结构图
2.3 遥控与动力套件
2.3.1 遥控模块
本文使用AT9S 的遥控设备,遥控器的两个摇杆分别控制无人机的动作姿态。遥控器利用接收机接收信号,然后接收机依据遥控器发出的信号,导入到主控制器,主控制器利用输入捕获功能来进行计算,进而得到遥控器每个通道的摇杆量。AT9S 遥控设备示意图如图4 所示。

图4 AT9S 遥控设备示意图
2.3.2 无刷电机
无刷电机是在有刷电机的基础上发展而来,与普通有刷电机不同的是电枢绕组旋转换向,无刷电机是线圈固定,通过改变电流的方向进而产生变化的磁场,驱使磁极偏转。本文的电机选用2812 无刷电机,其反应速度迅速、速度调节范围广,耐用性强,螺旋桨选用1045 螺旋桨。无刷电机与螺旋桨示意图如图5 所示。

图5 无刷电机与螺旋桨示意图
2.3.3 电池
四旋翼无人机飞行时电量消耗快,普通电池容量低、续航时长短。因为要搭载视觉模块,所以还要考虑整体载重,选用图6 中的3S 5200mAh 30C 锂电池来进行供电。

图6 锂电池示意图
2.4 图像采集与处理部分硬件组成
在稳定飞行的前提下,还要求无延时获取跟踪目标图像、利用跟踪算法计算目标位置,并将处理结果与图像传送给地面站,实现目标识别与跟踪功能。考虑到整体重量、计算性能与功耗,机载嵌入式设备选择树莓派4B。摄像头选用小型工业摄像头。树莓派4B 及摄像头外观如图7 所示,同时该摄像头利用任意长度的数据线来与树莓派连接,便于机载安装。

图7 树莓派4B 与摄像头
3 系统的软件设计
3.1 软件总体设计
根据目标识别与跟踪总体设计的要求,本文设计了目标识别与跟踪系统的软件结构。目标识别与跟踪系统的软件结构包括三大部分,目标识别与跟踪、无人机定位、目标跟踪方法。在目标识别与跟踪的结构中,使用跟踪算法得到目标在图像中的坐标和偏移角等相关信息,并输入到目标识别与跟踪系统中去。无人机定位目标过程中,利用算法得到无人机的精准坐标,并将数据发到相应的软件系统中。利用识别与跟踪系统的数据库,无人机通过跟踪目标提取地面运动目标坐标与无人机在空中的坐标位置来进行比对,依据坐标位置在图像的位置的不同,无人机的飞行运动姿态也做出相应的改变,实现无人机对地面运动目标实时定位与跟踪的设计目的。目标识别与跟踪系统软件构造示意图如图8 所示。

图8 目标识别与跟踪系统构造示意图
3.2 实时目标跟踪方法设计
参照目标在图像中的具体坐标,本文计划把目标识别与跟踪系统构建三种状态,分别为目标搜索、目标跟踪与目标丢失三种不同状态,分别对每种飞行状态设计相应的无人机飞行控制模式,达到无人机对地面目标实时识别与跟踪的目标。在进行目标跟踪任务之前,无人机首先升空到指定的高度进行目标搜索,检测并识别到目标之后,无人机进入目标跟踪状态,此刻无人机依照目标在图像中的坐标来对飞行状态进行改变,从而让地面目标一直在无人机拍摄图像中。假设因为目标超出范围而导致目标丢失,则无人机进入目标丢失状态。无人机利用增加高度扩大摄像范围,然后对运动目标重新搜寻,一旦找到目标则立即锁定目标,重新进入目标跟踪状态,循环反复,达到无人机对地面运动目标稳定地跟踪的目标。
3.2.1 目标搜索
在目标搜索状态下,无人机飞行到指定高度进行目标检测,确认目标之后如果出现目标丢失,再次进入目标搜索状态,并且通过目标识别与跟踪算法对目标物体进行自动识别并锁定。
3.2.2 目标跟踪
无人机搜寻到目标后,无人机识别与跟踪系统进入目标跟踪状态,接着系统利用目标在图像中的坐标来对无人机的飞行状态进行改变,实现运动目标的实时跟踪。目标跟踪状态几何模型示意图如图9 所示,构建二维图像坐标系(xv,yv)和无人机相对于图像的二维坐标系(xq,yq)。划分五个区域在二维坐标系中,当目标在0 号位置时,无人机悬停在目标正上方,当目标在1、2、3、4 号位置时,无人机参照目标的位置坐标来对路径进行优化,重新捕捉目标,并让目标再次进入0 号位置,达到目标跟踪的目标。假设目标坐标在1 号位置,图像中的坐标信息为(x,y),所以目标与无人机坐标系xq轴的夹角δ可以利用式(1)计算:
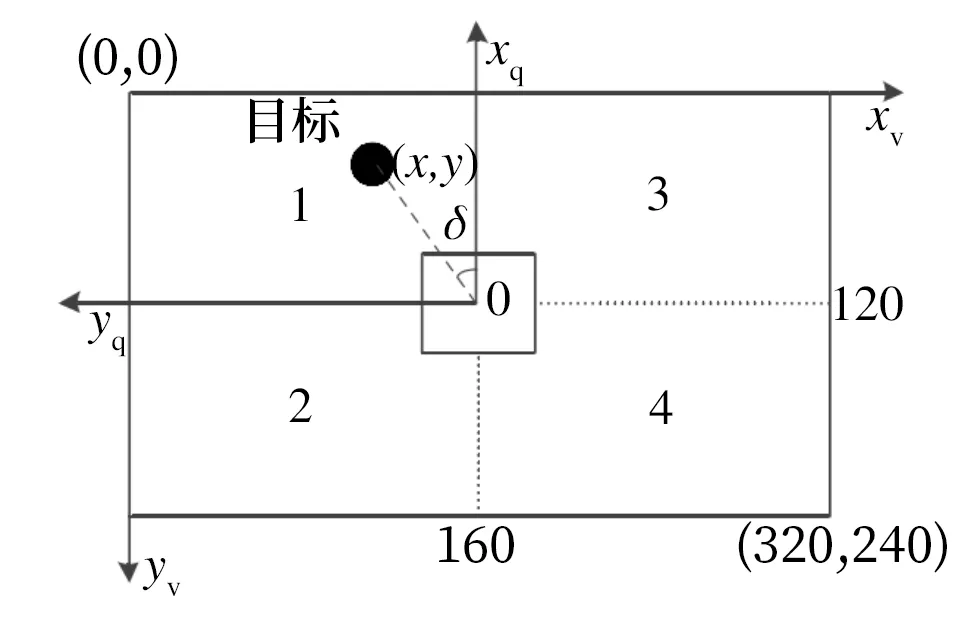
图9 目标跟踪状态几何模型示意图
取得夹角δ 后,将目标坐标放到无人机的二维坐标系中,此时无人机对于原点位置的增量由式(2)计算:
式中,xt,yt为优化无人机路径取得的坐标点;x0,y0为无人机坐标系的原点。
计算无人机路径位置坐标之后,利用无人机位置进行目标跟踪,并一直检测目标位置坐标,查看目标是否在坐标系的0 号位置。假设目标位置坐标相对于无人机坐标系的偏角发生改变,则系统会对无人机的飞行路径进行调整,重新优化路径,让无人机参照新优化的路径进行目标跟踪。
3.2.3 目标丢失
假设目标速度太快,则目标会超出跟踪范围,出现目标跟丢的现象。因此,目标识别与跟踪系统进入目标丢失状态,利用上升高度来增加无人机摄像头的摄像范围,重新寻找目标并锁定目标的坐标,目标丢失状态示意图如图10 所示。因为目标识别与跟踪系统的算法对目标在图像中的大小有要求,所以无人机飞行高度最高是3m。在3m 飞行高度范围内,假设目标再次被系统检测到,则无人机会对目标重新进行跟踪。假设无人机已经到了3m 的高度,但没有检测到目标,则无人机会依照目标消失的方向前行,重新搜索目标,并找到目标为止。

图10 目标丢失状态示意图
4 结束语
通过无人机低空下的目标识别与跟踪学习与研究,设计了目标识别与跟踪系统的硬件结构与软件框架,利用系统硬件与软件对目标识别与跟踪系统进行全面的分析。并对目标识别与跟踪的三种状态进行设计,完成无人机对地面目标的目标搜索、目标跟踪和目标丢失三个状态的飞行调节和优化路径,达到无人机稳定跟踪地面目标的设计要求,本文所提出的方案和方法为无人机低空下的目标识别与跟踪系统提供理论借鉴。
