涵洞工程洞身段安全诊断技术探究
2023-10-17孙超君董兆华
孙超君,孙 猛,董兆华,韩 影,万 青
(1.江苏省水利科教中心,江苏南京 210029;2.江苏省灌溉总渠管理处,江苏淮安 223200)
1 概 述
1.1 工程概况
淮河入海水道大运河立交地涵建成于2003 年10月,位于淮安市淮安区南郊,是淮河入海水道与京杭大运河立交工程,满足入海水道泄洪和京杭运河航运双重需求。大运河方向为渡槽,槽宽80.0 m,长125.7 m;入海道方向为涵洞,共15 孔,单条涵洞长约108.6 m,涵洞宽6.8 m,高8.0 m,工作闸门为潜孔式平面定轮钢闸门[1]。上游进口斜坡段长12.0 m,中部平段长88.0 m,下游斜坡段长8.6 m。为方便涵洞里程定位,从上游闸门处设定起始桩号为0+000.00 m,下游出口处设定截止桩号为0+096.60 m。
1.2 涵洞检查难点分析
涵洞工程常年在水下,对涵洞工程定期开展安全诊断,及时掌握工程质量,是确保工程安全运行的重要依据。但涵洞洞顶为填土覆盖时,洞身覆盖填土的沉降较为明显,不能真实体现洞身段的沉降,洞顶为过水通道时,洞身段无法开展沉降观测。入海水道大运河立交地涵洞身段常年在水下,在工程日常管理维护中如何快速、准确开展洞身段检查是一个难题。本文结合工程实际情况,研究提出了一套简便实用、经济准确的涵洞工程洞身段安全诊断技术,为涵洞工程安全运行和维护检查管理提供参考。
2 洞身段安全诊断技术研究
传统的涵洞工程水下检查是由潜水员下水或划小船检查,该检查方法效率低、费力、危险性较大且检查结果不精确,不能满足快捷、准确和安全等诸多要求。水下无人潜航器(Remotely Operated Vehicle,简称ROV),也叫水下机器人,是能够在水下环境中长时间作业的高科技装备,尤其是在潜水员无法承担的高强度水下作业或潜水员不能到达的深度和危险条件下更显现出明显的优势,近年来,被越来越多地应用于水工建筑物水下检测中。胡明罡等[2]采用ROV 对密云水库白河泄空隧洞闸门井前有压段洞壁混凝土、裂缝和洞内淤积进行水下探测;张凯等[3]在ROV 上搭载4K 高清摄像头,实现水下涵洞缺陷图像智能检测并应用于六塘河地涵。这些工程应用案例均表明水下机器人检查技术具有明显优势,因此本文研究提出采用水下无人潜航器搭载水下光学摄像头,结合水下图像声呐、全向成像声呐等多参数传感器等方法开展洞身段水下检查,查明涵洞内部淤积情况及混凝土表观是否存在缺陷,采用水下回弹检测方法开展涵洞混凝土强度检查,判断洞身现状质量是否满足设计或规范要求的整套涵洞工程洞身段安全诊断技术(图1)。
2.1 涵洞淤积情况诊断方法
ROV由控制主机、脐带连接线缆、水下潜器、辅助成像声呐及其他附件组成,具有作业灵活、工作高效、结果直观、数据可靠等优点[4],但无法有效应用于水流流速快或存在大量垃圾杂物等复杂水体,且当水质浑浊时,水下高清摄像头不能有效拍摄,只能通过声呐图像进行粗略判断。入海水道大运河立交地涵水体能见度在5 cm以内,闸门开启状态下水流速约0.4 m/s,上游洞口附近水面漂浮有大量水草、杂草、生活垃圾等。结合工程特点,提出涵洞淤积情况诊断方法如下:水下无人潜航器需从地涵下游洞口进入,沿涵洞中轴线往上游方向行进,采用二维图像声呐扫描普查洞内淤积及过流面阻塞情况,了解掌握洞内基本环境情况。水下无人潜航器沿洞轴线返回期间,采用全向成像声呐采集涵洞淤积断面数据,直至整条涵洞淤积情况检查完成。
2.2 涵洞混凝土表观情况诊断方法
采用水下无人潜航器搭载二维图像声呐及水下光学摄像设备对涵洞内表观混凝土进行扫描,剪辑提取出清晰的影像资料,对其进行解译分析,并进行结构等特征部位及其他相关信息的标注(图2),检查表观混凝土是否存在明显破损、剥落等缺陷。
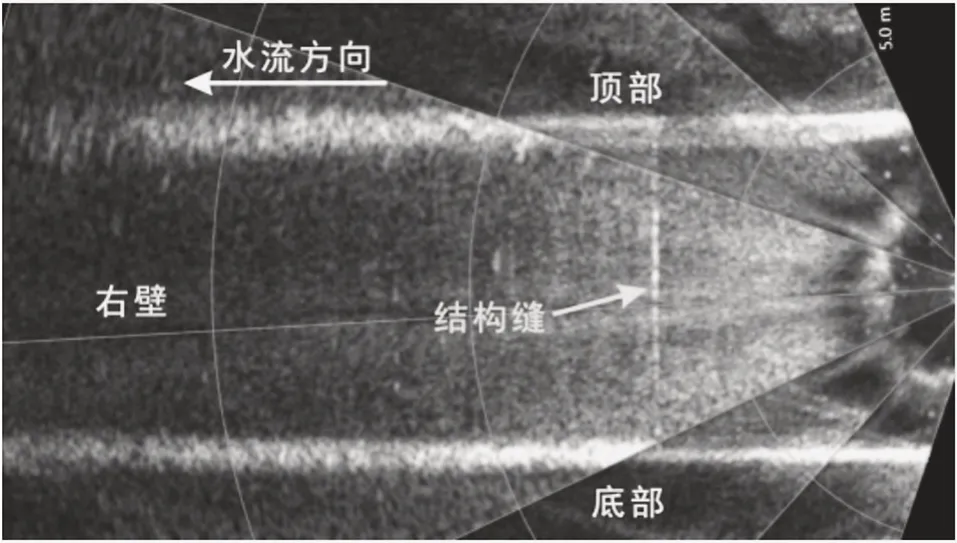
图2 混凝土二维图像声呐检查影像成果
视水体能见度情况,采用水下光学摄像设备,对声呐扫描显示异常部位(如混凝土剥落、裂缝、露筋等)、重点关注部位(如结构缝、闸门门槽等)抵近观察。影像记录包含的信息有:影像资料、潜器单元的前进方位角、前倾/侧倾角度、摄像头姿态、下潜深度、拍摄时间(与声学定位成果相对应)、潜器单元工作时长等参数,结合现场水下检查记录日志,生成典型缺陷摄像成果图,对洞壁混凝土表观进行局部抽查,验证、复核图像声呐检查的准确性。
2.3 涵洞混凝土强度诊断方法
依据《水工混凝土试验规程》和《水利工程施工质量检验与评定标准》,在不破坏原混凝土结构的前提下,采用回弹法检测涵洞混凝土现龄期抗压强度[5]。以2#涵洞为例,水下回弹沿涵洞走向按照间距10 m 布置断面测线,每个断面测线弹击16 个点。回弹测试时,始终保持回弹仪的轴线垂直于混凝土测试面。
测区回弹代表值从该测区的16 个回弹值中剔除3 个较大值和3 个较小值,其余10 个有效回弹值的计算式为式中:Rm为测区平均回弹值;Ri为第i个测点的有效回弹值。
选取有代表性的芯样进行碳化值测试,由测区平均回弹值及碳化深度值,根据《回弹法检测混凝土抗压强度技术规程》,查表得出相应测区混凝土强度换算值,对混凝土强度进行修正。
构件混凝土强度推定值计算式为
式中:fcu,e为构件混凝土强度推定值;mfcu,e为测区混凝土强度换算值的平均值;Sfcu,e为构件混凝土强度换算值的标准差。
3 检查成果分析
3.1 涵洞淤积检查成果分析
以2#涵洞为例,将实测涵洞断面数据进行整理,按间距5 m提取涵洞典型横断面数据,将实测断面数据与设计资料对比分析,获取淤积厚度数据,并标注结构部位、尺寸大小等信息,制作生成涵洞淤积断面成果图。桩号0+002至桩号0+015涵洞淤积断面成果对比见图3,涵洞淤积三维模型展示成果见图4。

图3 涵洞实测与设计横断面对比

图4 涵洞淤积与三维模型融合展示成果
入海水道大运河立交地涵2#涵洞底部淤积厚度情况见表1,检查结果表明,2#涵洞内部总淤积量约1 088.68 m3,占比涵洞体积约20.72%,淤积厚度介于0.05~2.93 m 之间,上游至下游淤积厚度基本呈递增趋势。上游闸门后桩号0+000~0+020 m 范围,淤积相对较少,平均淤积厚度约0.31 m;桩号0+020~0+096 m 范围,淤积相对较厚,淤积厚度介于0.50~2.93 m 之间,在下游桩号0+085 m 附近淤积厚度最大。

表1 涵洞底部淤积厚度情况
3.2 涵洞混凝土表观检查成果分析
2#涵洞混凝土二维图像声呐检查影像成果见图5,由图5 可以看出,涵洞洞壁表观混凝土未见明显破损、剥落等缺陷。

图5 涵洞混凝土二维图像声呐检查影像成果
2#涵洞声呐扫描表观混凝土未见明显破损、剥落等,采用水下光学摄像的方法只对涵洞结构缝、闸门门槽等重点关注部位抵近观察。入海水道大运河立交2#涵洞水下光学摄像检查成果见表2,结果显示结构缝未见明显缺陷,闸门门槽表观混凝土完好,洞壁表观混凝土未见明显缺陷。水下光学摄像验证结果与二维图像声呐检查结果一致。

表2 涵洞水下光学摄像检查成果
3.3 涵洞混凝土强度检查成果分析
选取有代表性的芯样进行碳化值测试,经测试平均碳化深度值统一取0.5 mm。用芯样抗压强度标准值对相应取芯孔周围水下回弹仪测取换算得到的混凝土强度换算值进行修正,得到最终修正后混凝土强度值如表3 所示。结果表明,涵洞混凝土整体现龄期抗压强度为26.5~29.2 MPa,满足工程设计强度等级C25要求。

表3 混凝土抗压强度
4 结 语
(1)采用水下无人潜航器搭载全向成像声呐和二维图像声呐扫描方法可以普查洞内淤积及过流面阻塞情况,得到涵洞淤积断面数据,了解掌握洞内基本环境情况,具有快速、简便、无损、精确等优点,满足涵洞身段淤积情况的检查要求。
(2)采用水下无人潜航器搭载二维图像声呐可以对涵洞混凝土表观进行普查,采用水下光学摄像设备可对声呐扫描显示异常部位及重点关注部位进行详查,能有效直观地检查表观混凝土是否存在明显破损、剥落等缺陷,具有快速、直观、准确等优点,满足涵洞洞身段混凝土结构表观检查的要求。
(3)采用回弹法检测涵洞混凝土现龄期抗压强度,选取有代表性的芯样进行碳化值测试,对混凝土强度进行修正,得到最终修正后混凝土强度值,可以确定工程涵洞混凝土现龄期抗压强度。
(4)涵洞工程洞身段日常检查应着重检查洞壁、底板、伸缩缝等部位混凝土是否有损坏,水平止水和垂直止水有无损坏,涵洞淤积情况等。入海水道立交地涵工程通过采用水下无人潜航器搭载水下光学摄像头,结合水下图像声呐、全向成像声呐等多参数传感器等无损检测技术对涵洞进行检测,对涵洞工作状况有了全面的了解,为工程安全运行提供可靠依据和技术支撑。