基于Landsat-9影像的云龙湖水深反演研究
2023-10-17任中杰万永智王继龙宋银燕张方方
任中杰,万永智,王 伟,王继龙,宋银燕,张方方
(江苏省水文水资源勘测局徐州分局,江苏徐州 221000)
水深以及水下地形测量是水文研究及生产活动中的重要领域之一,传统测量方法主要以人工方式进行长序列大范围观测,耗费大量人力物力、成本较高。面对大范围水域,作业时间跨度较高,河道湖泊的水量调度及水位实时变化均会影响水深数据的真实性及精度,不能反映水域真实情况。受限于自然条件,部分区域船舶难以进入,也形成了监测空白地带。
随着遥感技术的快速发展,遥感影像成本低、覆盖面积广且具有较高空间分辨率、时间分辨率,逐渐被广泛应用于资源调查、环境监测、灾害预警、区域时空演变等领域[1]。其中多光谱影像是通过多光谱电磁波,获取目标地物丰富的光谱信息,因此被广泛应用于水深反演领域。遥感反演水深是指利用遥感数据,依据可测参数值去反推水深值的水深量测方法[2],主要分为3 类:理论解析法、半理论半经验法和统计相关法。较为常用的是统计相关法,需要大量实测数据支撑,但不需要分析和研究水体内部的光学参数,只考虑数据之间的相关映射关系[3]。李经纬等[4]通过对比不同大气校正方法对水深因子相关性的影响,判断研究区域适宜的大气校正模型;赵顺利等[5]基于OLI 影像,利用最佳水深因子OLI-4 波段建立了水深模型,对错戳龙错盐湖进行水深反演;吴忠强等[6]利用G-S 变换对landsat-8 影像的多光谱波段及全色波段进行融合,提高了空间分辨率,基于融合后的影像进行水深反演。
影响水深反演精度的因素主要以水体悬浮物质、水体底质、水深反演因子为主。而水深反演因子的空间尺度取决于遥感影像的空间分辨率。影像融合能够有效提高影像的空间分辨率,但目前尚未有针对影像融合方法与水深因子相关性的研究,同时基于最新的Landsat-9 影像进行水深反演研究,尚未在云龙湖地区开展过。本文基于Landsat-9 影像,通过影像融合提高了空间分辨率,构建水深反演模型,确定了该区域的最佳水深反演模型。
1 研究区概况及数据处理
1.1 研究区概况
云龙湖位于江苏省徐州市泉山区,是著名的国家5A 级景区。其东靠云龙山,西依韩山、天齐山。南偎泉山、珠山。三面环山,一面临城。云龙湖以湖中路为界,东湖周长约8.1 km,西湖长约7 km,全湖周长约12 km,水面面积约6 km2[7]。
云龙湖水库是奎河源头,集水面积60 km2,总库容3 323万m3,是一座以城市防洪为主,兼有灌溉、养殖、景观、旅游开发等综合利用功能的中型水库。对云龙湖水库进行水深反演研究具有重要的现实意义。
本文以云龙湖东湖水上世界以南水面区域作为研究区域(拐点坐标分别为1 号点117.1549°、34.2412° ,2 号点117.1666° 、34.2394° ,3 号点117.1582°、34.2298°,4号点117.1497°、34.2324°,5号点117.1502°、34.2349°,6号点117.1479°、34.2384°),面积约1.3 km2。
1.2 影像数据来源
Landsat-9 是美国陆地卫星计划(Landsat)的第九颗卫星,2021年9月发射,每隔16d对地球进行一次成像,与Landsat-8 存在8d 的偏移。相较于Landsat8 的12 位量化及可识别4 096 种色调,Landsat-9 具有更高的辐射分辨率(14 位量化),可以识别16 384 种色调,同时具有更优的信噪比。Landsat-9 共有11个波段,波段简介见表1。
为避免水位变化的影响,本文选取了与实测作业时间基本一致的Landsat-9 影像数据,产品号为LC09_L1TP_121036_20221107_20221129_02_T1。数据来源于空天院遥感数据服务系统(http://eds.ceode.ac.cn/nuds/test)。研究区域影像清晰,无云。对影像进行预处理,主要包括几何校正、影像裁切。
1.3 实测数据获取及处理
本文根据研究区域形状,大致东西方向布设测量航线56条,各航线间隔25 m。将布设的航线导入到测深仪导航软件中。将高频测深仪中海达HD-27T、华测GPS X90 固定在船边沿,保持测杆垂直水面。将记录间距设置为10 m,按照导航软件的指示驾驶船只按航线方向行进,软件自动记录所在位置和水深。水位数据来源于云龙湖水文阁水位站现有水尺观测的每日水位数据。采集数据期间,云龙湖水位稳定在32.65 m,风力为东南风2级。
对测得的水深数据进行检查,剔除异常值。由于Landsat-9 多光谱影像分辨率为30 m,岸边区域存在混合像元,影响水深精度,因此对岸边实测点进行剔除。从8 392 个点位中挑选出765 个点位作为训练样本数据,另挑出661 个点位作为检验样本数据,挑选原则为点位均匀分布,具有足够代表性,训练样本和检验样本无重叠点位。
2 水深反演模型建立
2.1 水深因子确定
2.1.1 单波段相关性
选取Landsat-9 影像中多光谱数据B1,B2,B3,B4,B5,B6,B7 共7 个波段,将像元灰度值提取至点位与训练样本水深进行相关性分析。由于影像空间分辨率为30 m,同一个像元对应多个实测点,像元中心值不能反映像元区域内部水下地形的差异性,因此采用双线性内插法计算点位对应的灰度值,结果显示,相较于像元中心值,水深相关性有一定提升。
从表2 可以看出,相关系数绝对值较高的波段为B5、B6、B7。理论上,透水波段应为蓝、绿波段,相关系数最高,但仅建立在水质较清且水底反射率较高的前提下。由于不同水体的泥沙含量、叶绿素浓度各有不同,所以与水深相关系数较高的波段也会有所差异,这种现象被称为“红移”[8]。

表2 波段灰度值与水深相关系数
2.1.2 影像融合
Landsat-9 多光谱影像每个像元对应900 m2的水域面积,将多光谱及全色影像进行融合,能够获得高空间分辨率的多光谱影像,能有效降低像元尺度,能细致反映水下地形变化。本文选用多种融合方法,对融合影像进行相关性分析,选择水深相关系数最高的融合方法。
常用的融合方法有:Brovey、Gram-Schmidt、HSV、NNDiffuse、Pansharp、PCA、SFIM 融合方法等[9]。其中,Brovey、HSV、SFIM 对波段数存在限制,因此,仅选择相关系数较高的B5、B6、B7 波段参与融合。对融合结果进行相关性分析,结果如表3所示。
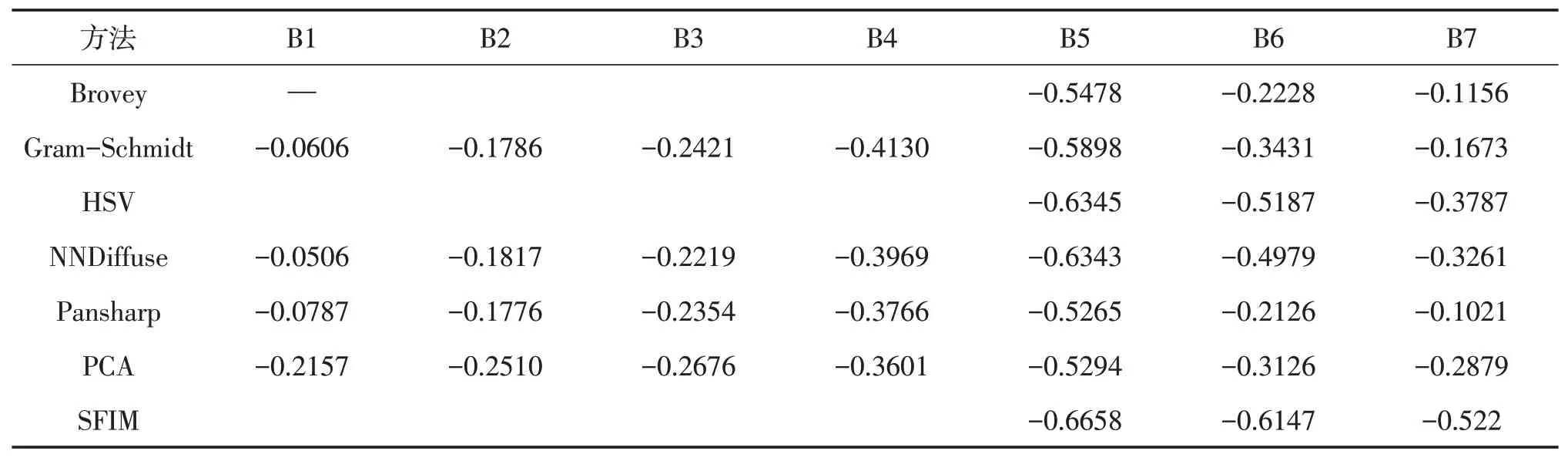
表3 不同融合方法水深相关系数
从表3 可知,相较于原始影像,SFIM 融合方法相关性保持较好,各波段没有明显降低,虽然有一定的光谱信息损失,但有效提高了影像空间分辨率;其次是NNDiffuse融合方法,仅B5波段相关性保持较好,其他融合方法均明显降低了水深相关性。故本文采用SFIM 融合方法对B5、B6、B7 以及全色波段B8进行融合。
2.1.3 水深因子确定
研究表明,单波段模型水深反演精度远不如多波段模型[10],且用对数因子做比值可以进一步提高数据相关性。本文尝试用对数因子、对数比值因子、比值因子等多种组合进行相关性分析,寻求最佳水深因子,分析结果如表3所示,仅列出相关系数较高的4项,如表4所示。相关系数较高的4个水深因子均包含B5 波段,其中B5+B6 相关系数最高,相较于B5波段有一定的提升。
2.2 水深反演模型构建
基于最佳水深因子B5+B6进行回归性分析,分为指数回归、傅里叶回归、高斯回归、多项式回归(1次、2次)。
从表5可以看出,反演模型决定系数均较差,一方面是由于湖泊水体悬浮物相较于清澈海域较多,导致波谱红移,影响反演精度,另一方面是由于影像空间分辨率仍然很低,通过影像融合将像元对应水域面积900 m2降低至225 m2,仍然不能真实反映水下地形变化起伏情况,实测水深数据平均250 m2采集一个点位,但很难保证点位处于像元中心值,因此出现较多异常值。常规多项式拟合一般采用最小二乘法(LSM),使残差平方和极小,计算简便,然而稳健性(抗粗差性)较差。为了避免异常值对反演模型的影响,采用最小绝对残差(LAR)对数据进行拟合,最优拟合结果见图1。

图1 二次多项式LAR拟合

表5 水深反演模型

表6 反演模型精度
RMSE 仅为0.0253 m,且决定系数显著提升。反演模型公式为
式中,p1为-1.564e-06;p2为0.03792;p3为-227.1。
3 水深反演结果及精度检验
3.1 云龙湖水深反演
通过水深反演模型进行波段运算得到水深反演灰度图,见图2。
3.2 精度评价
利用未参与水深反演模型计算的661个实测水深点作为验证组,对反演模型进行精度评价。反演组(FYZ)和实测组(SCZ)回归,如图3所示。
从图3及表7可以看出,基于最优水深因子B5+B6 的水深反演模型反演组与实测组具有相关性。RMSE 小于0.1 m,得益于湖底地形起伏波动不大,降低了反演误差。从定性角度看,虽然总体精度不高,但在一定程度上真实反映了水下地形,湖南路一侧及荷风岛区域水深较浅,东湖中部区域水深较深,符合实际情况。

表7 水深因子相关系数
4 结 语
本文基于Landsat-9影像的多光谱及全色波段,结合实测水深数据进行对比分析,确定了适用于云龙区东湖南部区域水深反演的最佳影像融合方法为SFIM融合算法,该算法能够在有效降低水深反演像元尺度的情况下较好保持影像光谱信息。确定了Landsat-9 影像水深相关性最高的波段为B5,最佳水深因子为B5+B6,并建立了多种水深反演模型,效果最好的反演模型为基于最小绝对残差(LAR)的二次多项式模型。
采用实测水深数据进行反演精度评价,结果表明反演结果能应用于实际,影像获取难度低、计算简单,弥补了人工观测的不足。但从评价结果看,反演精度有限,空间分辨率较低,反演模型受湖泊水质因素及水位变化影响较大,最佳水深因子及反演模型随时可能变化,后续有必要针对反演模型适用性开展进一步研究。