基于灰狼算法的轮毂电机汽车悬架性能优化
2023-10-17段慧清王鹏葛祥旭
段慧清 王鹏 葛祥旭
(北京理工大学前沿技术研究院,济南 250300)
1 前言
轮毂电机具有平台适应性强、驱动灵活、节省车内空间等优点,但不可避免地带来非簧载质量增加的问题,通用汽车平台在集成轮毂电机后,势必需要进行悬架优化与调校,以保证整车的舒适性与操控性。
针对此问题,专家学者进行了深入研究,提出了不同方法。文献[1]运用均匀设计法设计了变量的组合方案,获得了约束条件与优化变量的显式关系,应用遗传算法获取了最优参数。文献[2]运用灰狼算法对可控阻尼的半主动悬架的关键参数进行了设计。文献[3]提出了主动悬架的PID 控制策略。文献[4]应用切换系统理论对半主动空气悬架的控制模式和模式切换过程进行了研究。文献[5]从电动汽车能耗角度,提出了一种被动悬架参数优化方案。
目前,实际车型仍以配备被动悬架为主,针对以上问题,本文结合多方研究成果,以前后悬架的刚度、阻尼为优化变量,以悬架综合性能最优为优化目标,运用灰狼优化算法求解最优目标下的变量组合。
2 系统模型的建立
2.1 半车被动悬架模型
前、后半车悬架模型可以很好地反映车身的垂直振动与俯仰运动,故本文选择半车模型为研究对象,建立半车被动悬架的动力学模型如图1 所示。其中ks1、ks2分别为前、后悬架的弹簧刚度,cs1、cs2分别为前、后悬架的阻尼,I为半车的转动惯量,φ为车身俯仰角度,zc为质心位移,mc为半车质量,mt1、mt2分别为前、后轴非簧载质量,zs1、zs2分别为前、后轴簧载质量位移,zt1、zt2分别为前、后轮胎位移,zr1、zr2分别为前、后轴路面激励,kt1、kt2分别为前、后轮胎的刚度,a、b分别为质心到前、后轴的水平距离。
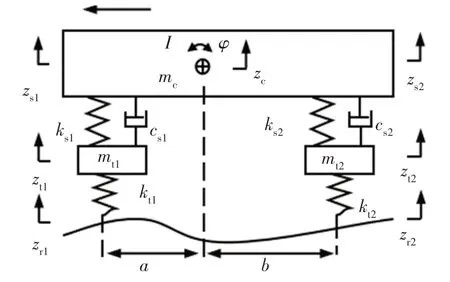
图1 半车被动悬架的动力学模型
根据牛顿运动定律,可以列出模型的相关微分方程组,其质心运动方程可表示为:
车身俯仰运动的微分方程为:
前、后非簧载质量的运动微分方程分别为:
在φ很小的情况下,前后簧载质量位移、半车质心位移、俯仰角之间的关系为:
对于路面输入,采用滤波白噪声模拟路面激励zr(t)的时域模型为[6]:
式中,n1=0.011 m-1为路面不平度下的截止空间频率;n0=0.1 m-1为参考空间频率;v=25 m/s 为车速;Gq(n0)为路面不平度系数,本文采用C 级路面,取Gq(n0)=2.56×10-4m3;w(t)为白噪声。
前、后车轮的路面激励相同,但存在一定的时间差。在模型中,可通过为前轮路面激励增加时间延迟模块来建立后轮路面激励模型。
2.2 模型建立
根据以上微分方程与路面激励模型,在MATLAB/Simulink 中建立半车悬架振动模型,选取质心加速度、车身俯仰角加速度、前后悬架动挠度、前后悬架动载荷为输出量,如图2 所示,其中cs1、cs2、ks1、ks2为可优化的变量。

图2 半车悬架振动模型
3 仿真优化设置
集成轮毂电机后,选取ks1、ks2、cs1、cs2作为优化变量,在设定的范围内,用优化算法寻找最优的变量值。
为保证悬架上、下运动时不撞击限位块,以免引起悬架性能恶化,令悬架动挠度均方根值δf小于挠度上限[δfd]的1/3,可保证悬架撞击限位块的概率小于0.3%。已知原车动挠度最大值为0.06 m,车轮动载荷均方根值小于G/3,可保证车轮跳离地面的概率小于0.15%[7]。综上,优化的约束条件为:
式中,δf1、δf2分别为前、后悬架动挠度均方根;δd1、δd2分别为前、后轮动载荷均方根;G1、G2分别为前、后轴载荷。
悬架的性能指标中,质心加速度、俯仰角加速度可反映车身的振动水平,影响乘坐舒适度。根据ISO 2631-1《人体承受全身振动评价:一般要求》[8],质心加速度和俯仰角加速度的加权系数分别为1和0.4,故可列出行驶舒适度评价指标Q1的计算公式:
式中,δa0、δa分别为集成轮毂电机前、后质心加速度均方根;δb0、δb分别为集成轮毂电机前、后俯仰角加速度均方根值。
悬架动挠度在一定程度上可以同时反映车辆的乘坐舒适性和操纵稳定性[9],并与车辆的许用动行程有关。车辆悬架动挠度的评价指标Q2计算公式为:
式中,δf10、δf1分别为集成轮毂电机前、后前轮动挠度均方根;δf20、δf2分别为集成轮毂电机前、后后轮动挠度均方根。
车轮动载荷能够反映车辆操纵稳定性,其评价指标Q3计算公式为:
式中,δd10、δd1分别为集成轮毂电机前、后前轮动载荷均方根;δd20、δd2分别为集成轮毂电机前、后后轮动载荷均方根。
综合以上评价指标,以3 个指标的加权平均值最小为优化目标,集成轮毂电机后半车悬架的优化代价函数F整理为:
式中,w1=2、w2=2、w3=1分别为Q1、Q2、Q3的权值。
4 灰狼算法
灰狼优化算法是一种群体智能算法[10],具有实现简单、控制参数少、全局搜索能力强、求解精度与收敛速度均衡等优点。
灰狼算法模拟了灰狼群体的社会等级与捕猎机制。狼群等级被简化为2 个层级:α、β、δ为3 匹头狼,设定从α到δ,头狼的地位依次降低;ω为低层级狼,数量若干,听命于头狼,围绕3 匹头狼的位置进行捕猎。灰狼算法迭代过程的数学模型可概括为头狼占位、ω狼随机包围和加权更新。
a.头狼占位。在算法应用中,每只灰狼的位置代表解空间中的一个可行解,算法初始时随机生成一组解,组成初始灰狼群,然后经计算将本轮的最优位置依次赋值给3 匹头狼α、β和δ,则α代表当前找到的最优解,β和δ分别代表次优解。
b.ω狼随机包围。ω狼围绕着3 匹头狼生成新一轮的位置,从而实现3 匹头狼指引群体朝着搜索空间的最优方向移动。
散捕猎过程中,灰狼与猎物(本轮3匹头狼暂居的位置)的距离为:
式中,D为灰狼群个体与猎物的距离向量;C为0~2范围内的随机数;Xp(i)为猎物,即头狼在第i轮迭代中的位置向量;X(i)为灰狼在第i轮迭代中的位置向量。
狼群个体在下轮迭代中围绕猎物的位置为:
式中,A=2a·r-a为系数向量,当|A|>1时,狼群远离猎物去搜索其他目标,当|A|<1时,狼群靠近攻击猎物;r为0~1范围内的随机向量;a为初始值为2的常数,随着迭代次数的增加,从2线性减小到0。
由式(12)可知,D为一个带有随机因数的距离向量,式(13)使狼群个体围绕上一轮头狼位置随机分布。但狼群中有3匹头狼,根据式(13),每匹头狼都能生成狼群个体下轮迭代的位置,这就需要进一步完成最终的位置更新。
c.加权更新。围绕3 匹头狼依次生成狼群的位置向量X1、X2、X3分别为:
式中,Xα、Xβ、Xδ分别为3匹头狼的位置;C1、C2、C3为3匹头狼对应的随机数;A1、A2、A3为3匹头狼对应的系数向量;Dα、Dβ、Dδ分别为3匹头狼与个体间的距离。
设定3 匹头狼对狼群的影响权重相同,则狼群根据α狼、β狼和δ狼的位置更新下一轮的位置[11]:
灰狼算法会多次迭代重复以上过程,从而搜寻更优解[11]。
5 系统优化与分析
使用m 语言编辑灰狼优化算法,以代价函数最小为目标,在约束条件范围内,调用Simulink 模型(见图2)进行联合优化仿真。轮毂电机汽车模型的初始参数如表1 所示,其中ks1、ks2、cs1、cs2为待优化的变量,变量的范围为各自初值的75%~125%。mt1、mt2中已包含轮毂电机的质量,其数值相较于未安装轮毂电机时增大了30 kg。

表1 轮毂电机汽车模型初始赋值
为验证灰狼算法的优化能力,选择粒子群算法作为对比算法。运用2种优化算法与半车悬架模型进行联合仿真,2 种算法的种群个体数量均设置为25 个,迭代次数均设置为20 次,运行2 种算法后可得到代价函数最优情况下变量的解。2 种算法的迭代曲线如图3 所示,从图3 中可以看出,粒子群算法陷入了局部最优,过早收敛使其未找到全局最优解,相较于粒子群算法,灰狼算法寻找到更优的解,使代价函数的值更小。

图3 灰狼算法与粒子群算法对比
灰狼算法寻找的最优解经过圆整后如表2 所示。

表2 优化后变量值
经过优化的轮毂电机汽车悬架质心加速度、俯仰角加速度、前后悬架动挠度、前后轮动载荷与原型车时域响应对比如图4所示。

图4 优化前、后各变量时域响应结果对比
分析系统仿真结果,列举优化前、后质心加速度、俯仰角加速度、前后悬架动挠度、前后轮动载荷的均方根值,如表3所示。

表3 优化前、后均方根对比
从表3 中可以看出,经优化的轮毂电机半车悬架与原型车相比:质心加速度均方根值、角加速度均方根值均明显下降,表明整车的乘坐舒适性得到有效提升;前悬架动挠度均方根值明显下降,后悬架动挠度均方根值大幅提高,但优化后均方根值为4.4 mm,仍远小于最大动挠度的1/3,即仍在约束条件20 mm 以内;前、后轮动载荷下降,性能均有所提升。表3 中数据表明,经过优化设计,与原车相比,集成轮毂电机的汽车悬架整体性能得到有效提升。
6 结束语
本文在半车悬架模型基础上,根据悬架的评价指标,设计了以原型车悬架性能为参考的优化代价函数,然后利用灰狼优化算法,以代价函数最小为目标,搜寻最优的悬架的刚度、阻尼参数。
仿真数据表明,相较于粒子群算法,灰狼算法更能避免局部最优,并能在复杂的模型中搜索到使代价函数最优的变量组合。在设定的约束条件范围内,悬架性能的评价指标质心加速度、俯仰角加速度、轮胎动载荷均有所降低,其中质心加速度的优化效果最显著,表明电动汽车在集成轮毂电机使非簧载质量增加后,通过科学设置约束条件与优化目标,使用灰狼算法进行性能优化,可使悬架综合性能,尤其是舒适性能得到有效提升。
