基于微型车的车辆队列试验平台设计与开发*
2023-10-17邢春辉孔伟伟刘畅李鹏飞罗禹贡
邢春辉 孔伟伟 刘畅 李鹏飞 罗禹贡
(1.中国农业大学,北京 100083;2.清华大学,汽车安全与节能国家重点实验室,北京 100084)
1 前言
智能网联汽车队列是车辆智能化、网联化技术学术研究和产业化应用的重要场景,也是未来智能汽车规模化应用的典型形态[1-2]。设计并开发智能车辆队列试验平台,为车辆队列或多车协同相关研究提供实车道路测试平台和条件,具有重要的现实意义。
在车辆队列控制方面:Li[3]等利用3 辆搭载全球定位系统(Global Positioning System,GPS)模块的实车与基于专用短程通信(Dedicated Short Range Communication,DSRC)的 车 联 网(Vehicle to everything,V2X)通信进行了队列尾部入队并稳定行驶的试验;Li[4]等以3 辆微型履带车作为线控执行系统,利用GPS 获取位置信息,采用分布式模型预测控制(Model Predictive Control,MPC)实现队列稳定行驶。以上2项研究在已实现高阶自动驾驶功能的车辆基础上搭建车辆队列,成本较高且实现产业化尚有较大难度。Zhang[5]等以3辆实车作为线控执行系统,同时利用GPS 数据与车载传感器数据支持队列车辆的纵、横向控制,完成了直线行驶、换道、环行和U 形弯4 个场景的试验验证。Lee[6]等在3 辆半挂重型汽车的基础上,以摄像头与雷达作为感知硬件,实现了车辆队列的稳定行驶。以上2 项研究针对队列行驶的不同场景完成了试验验证,但其队列试验场景各自独立,缺少队列组队与不同场景转换的功能。
综上,为实现车辆队列系统的产业化与规模化,本文未采用稳定性不足的GPS 轨迹跟踪方法,而是以具备智能驾驶辅助功能的车辆为基础,搭建具有可扩展性、支持多场景切换的车辆队列试验平台。采用视觉感知的纯跟踪算法,并针对硬件方案进行调整,实现队列车辆稳定的横向控制。针对车队内领航车与跟随车分别设计车辆队列试验平台硬件系统和分层软件系统,基于闭环控制微型车开展车辆队列在基础功能场景下的试验验证,并分析试验结果。
2 微型车队列试验平台硬件系统设计
2.1 硬件系统架构
建立基于线控微型车的车辆队列实车试验平台硬件系统架构,如图1 所示。本文试验平台车辆只需具备基础L2 级驾驶辅助功能,采用摄像头支持队列跟随车的横向控制,采用毫米波雷达支持队列跟随车的纵向控制。针对跟随车,硬件系统由感知模块、决策控制模块和通信模块组成:感知模块负责获取队列系统所必需的环境信息,决策控制模块负责智能决策与控制,通信模块负责与他车、路侧设备进行数据交互。领航车由遥控器直接控制,无需车载传感器支持横、纵向控制。
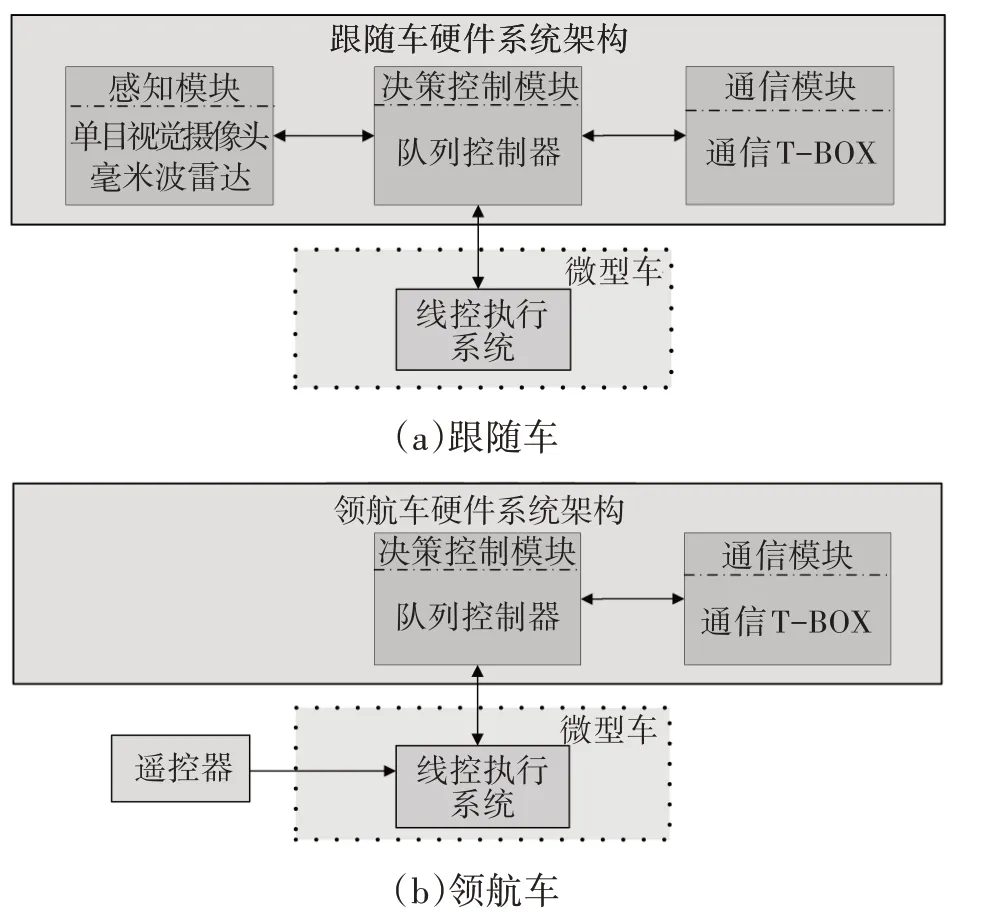
图1 智能网联车辆队列硬件系统架构
本文试验平台采用某公司生产的电驱动微型车,其线控执行机构可实现车速、曲率闭环控制。领航车为四轮差速转向微型车,跟随车为差速转向的履带车,基本参数如表1所示。
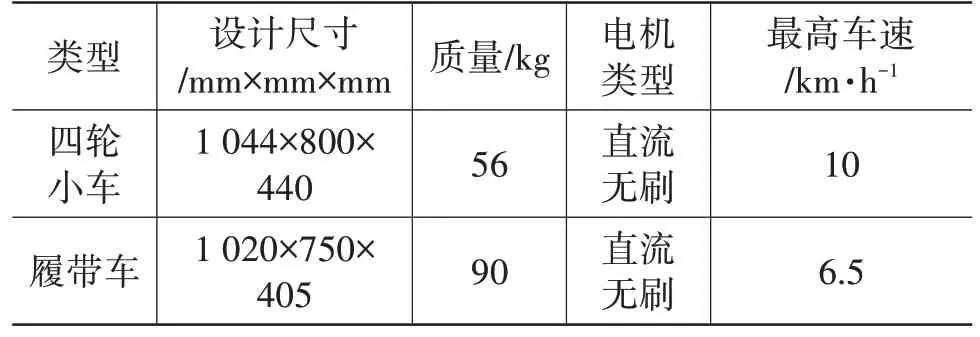
表1 微型车的主要参数
2.2 队列控制器硬件设计
根据硬件功能可将队列控制器分为微控制单元(Microcontroller Unit,MCU)子系统模块、电源模块、复位模块、时钟模块、后台调试模式(Background Debugging Mode,BDM)模块。队列控制器硬件架构如图2所示。

图2 队列控制器硬件架构
MCU 子系统模块负责队列相关决策、控制的计算;电源模块接受微型车提供的12 V 电压,经电源芯片为其他模块供电;复位模块保证控制器电压不发生突变,使控制器正常工作;时钟模块产生的时钟脉冲信号按一定的功率节拍对代码进行读取、译码、执行等;BDM 模块用于此控制器的调试、内部闪存烧写等功能。MCU 通过FlexCAN 与硬件系统中的其他硬件进行交互。控制器局域网(Controller Area Network,CAN)线路分为CAN-A 与CAN-B 2类线路,其中CAN-A 的通信速率为250 kbit/s,CAN-B的通信速率为500 kbit/s,高通信速率可满足更庞大数据量的内容收发。CAN-A 与微型车线控执行系统进行速度、曲率等车辆状态信息的交互;CAN-B与感知、通信模块进行数据的交互。
2.3 感知模块设计
队列车辆需获取车间距、相对速度等信息用于支持车辆的纵向控制,本文试验平台选用电子扫描雷达(Electronic Scanning Radar,ESR)检测自车与前车的距离,其基本参数如表2所示。
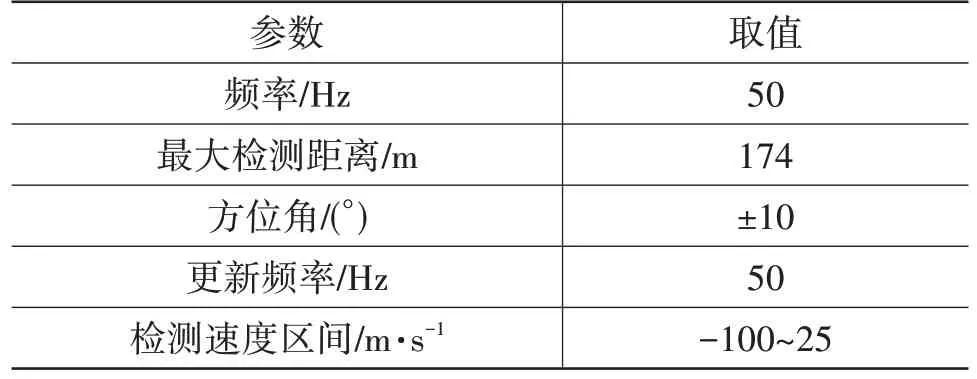
表2 电子扫描雷达基本参数
队列车辆需要获取车道线信息支持车辆的横向控制,本文试验平台选用Mobileye 630 单目摄像头识别车道线,输出微型车横向控制所需的道路航向角、曲率等数据,其基本参数如表3所示。

表3 单目摄像头基本参数
2.4 通信模块设计
目前,受业界广泛关注的车联网通信协议包括DSRC 和LTE-V[7](Long Term Evolution-Vehicle)。张心睿等[8]以数据包投递率和时延为评价指标,通过试验证明LTE-V 相较于DSRC 有更广的通信范围,且在同一范围内可靠性更高。因此,本文试验平台选择LTE-V 作为通信协议。V2X 通信需要远程信息处理器(Telematics BOX,T-BOX)作为硬件载体,本文选用由星云互联公司生产的OBUYZM9,其内置Linux 系统,可通过安全外壳(Secure Socket Shell,SSH)协议访问、调整通信的内容,以满足不同的通信需求。队列微型车与路侧设备分别搭载通信T-BOX,从而实现V2X通信。
3 微型车队列试验平台软件系统设计
3.1 分层软件系统架构
本文试验平台采用具备可扩展性、可切换功能场景的分层软件系统架构,如图3 所示。本文将软件系统分为数据交互层、感知层、决策层、控制层4个部分。决策层为软件系统的运算中枢,接收来自数据交互层、感知层的数据,根据数据进行队列系统相关控制策略的执行,并根据策略选择不同的控制方法。控制层将期望速度与期望曲率输出到微型车线控执行系统,并接收车辆状态反馈量,实现队列车辆的闭环反馈控制。在控制过程中,决策层将队列状态信息发送到数据交互层实现与他车、路侧设备的交互。
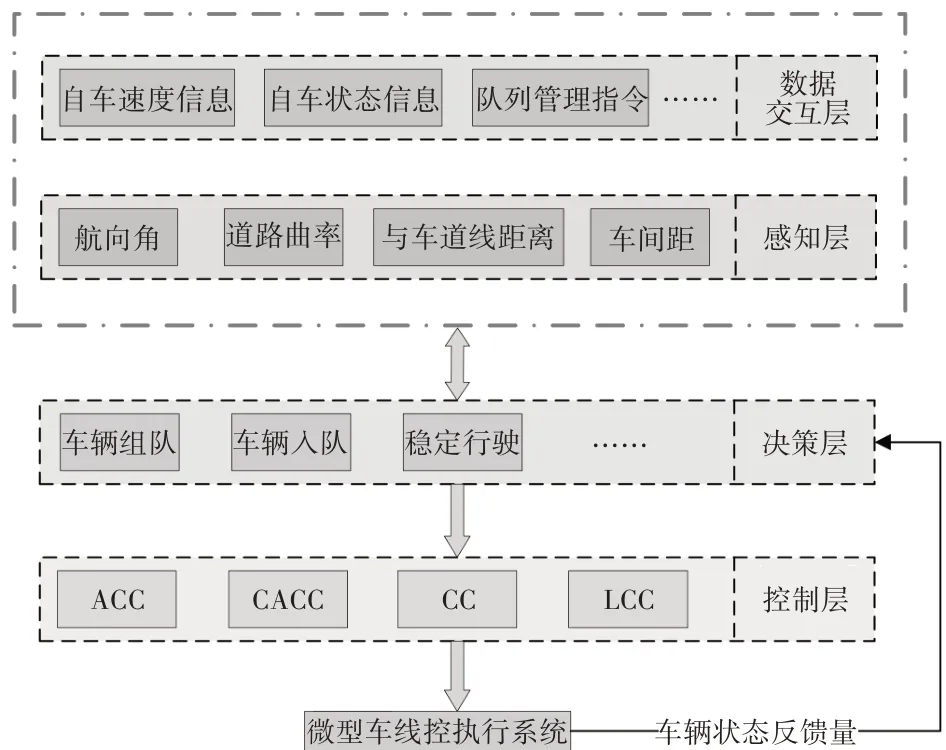
图3 队列系统软件系统架构
数据交互层中包括微型车速度信息、微型车状态信息、队列管理指令等;感知层包括感知硬件采集的航向角、道路曲率、自车与车道线距离、自车与前车间距等信息;决策层包括车辆组队、车辆入队、稳定行驶等队列功能场景;控制层包括队列微型车所应用的纵、横向控制方法,如自适应巡航控制(Adaptive Cruise Control,ACC)、协同自适应巡航控制(Cooperative Adaptive Cruise Control,CACC)、定速巡航控制(Cruise Control,CC)、车道居中控制(Lane Center Control,LCC)。
跟随车决策层根据接收到的数据与指令进行相应的决策与控制。建立决策层架构,如图4所示,首先将接收到的数据进行整合、处理,再根据数据信息判断当前车辆的角色与功能场景,车辆角色分别为自由车、领航车、跟随车。自由车即非队列车辆,如将要加入队列的车辆或已离开队列的车辆;领航车即人工控制的队列头车;跟随车即队列中具备基础辅助驾驶功能的跟随车。队列功能场景包括车辆组队、车辆入队、队列稳定行驶等。根据车辆角色与功能场景即可判断当前需要执行的控制策略,完成控制策略计算后便可输出控制层所需的控制方法序号以及队列管理等信息。
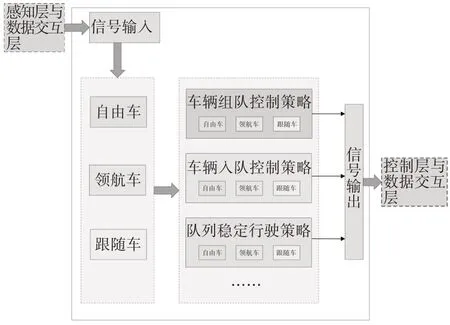
图4 决策层架构
采用此设计方法使本软件系统具备2项优势:
a.可拓展性。此软件系统采用分层软件系统架构,若需增添队列功能场景,只需在决策层增加相应的控制策略,不必改变软件系统架构。
b.功能场景可切换。队列运行过程中,只需改变当前车辆的角色与所要执行的控制策略,便可实现功能场景的切换。
3.2 数据交互层与感知层设计
队列车辆需要与路侧设施、其他车辆进行数据交互,建立数据交互层信息流,如图5所示。数据交互层通过2.4节中的通信T-BOX 硬件实现。自车与他车间交互传输的数据包括车辆速度、与前车的间距、协同组队指令、协同入队指令。例如,当车辆入队时,入队车辆需向领航车发出入队请求,待领航车同意入队后再执行车辆入队控制策略。路侧设备将组队指令、入队指令、入队车辆编号发送到自车,自车根据指令选择相应的控制策略。
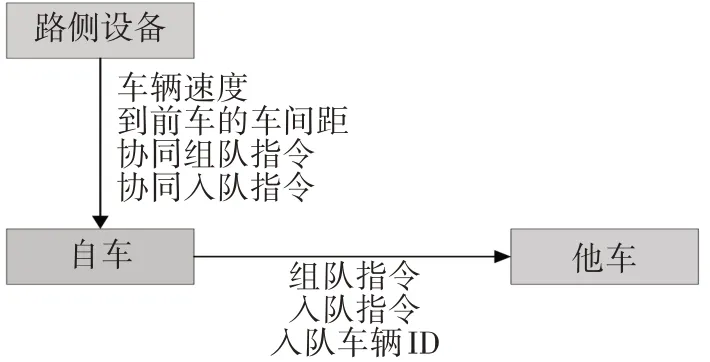
图5 数据交互信息流
感知层获取队列系统所必需的环境信息并输出到决策层、控制层。感知层获取的数据如表4 所示。为使队列车辆实现车道居中控制,需获取自车所处车道的数据信息,即从单目摄像头获取的A0~A3、AQuality。为使队列跟随车实现自适应巡航控制,需要获取自车与前车的距离、相对速度数据,即通过毫米波雷达获取的参数B1和B2。同时决策层也需车间距等数据进行决策。
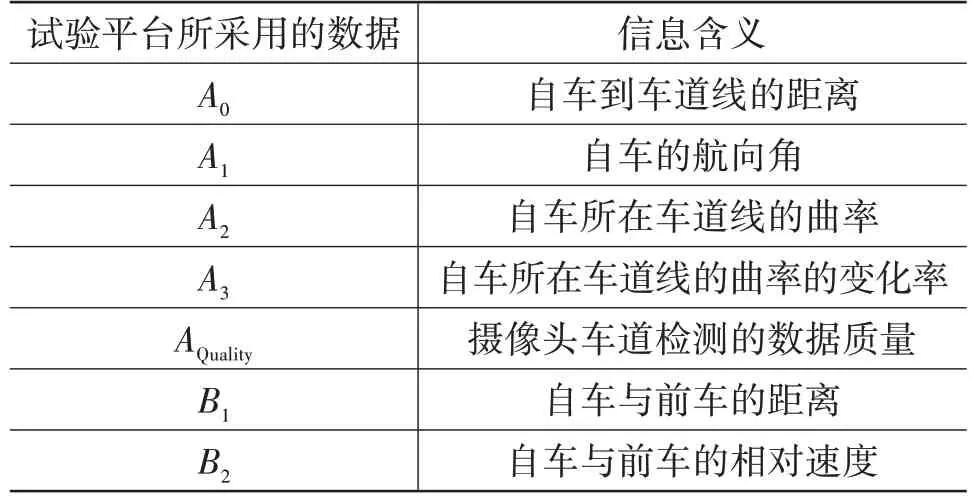
表4 感知层所获取的数据
3.3 决策层控制策略设计
本文针对典型场景说明相应的决策层控制策略,分别为车辆组队、车辆入队、队列稳定行驶。
3.3.1 车辆组队
本文设计的车辆组队控制策略如图6所示。车辆组队的初始状态为2 辆车自由行驶,车辆角色为自由车,路侧设备发出组队指令后,后车收到组队指令,并在领航车同意后加速驶入通信范围;后车进入通信范围后,会继续调整速度直至到达队列稳定行驶车间距,至此两车角色分别转为领航车与跟随车并完成车辆组队。
3.3.2 车辆入队
车辆入队场景设置为同一车道的入队车辆加入稳定行驶的车辆队列,完成入队过程。本文设计的车辆入队控制策略如图7所示。当车辆队列稳定行驶时,路侧设备发送入队指令到队列车辆,领航车同意入队后,入队车辆加速驶入通信范围;入队车辆进入通信范围后,继续调整速度直至车间距到达队列稳定行驶期望距离,车辆角色转为跟随车,至此完成车辆入队。

图7 车辆入队控制策略
3.3.3 队列稳定行驶
队列稳定行驶场景设置为队列车辆以相同的速度稳定行驶。本文设计的队列稳定行驶控制策略如图8所示,队列处于稳定行驶状态时,队列头车角色为领航车,队列内其余车辆角色为跟随车。各队列车辆以相同速度匀速行驶,并实时更新队列状态,接收、响应路侧设备的指令等。
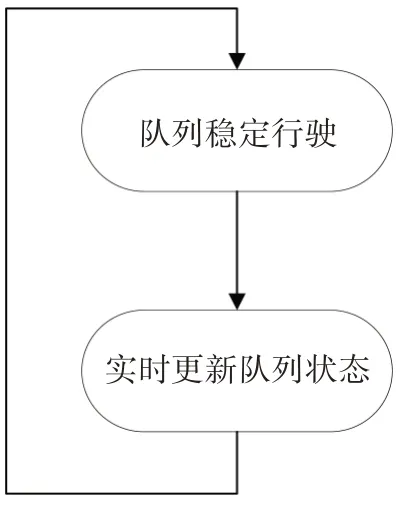
图8 队列稳定行驶控制策略
3.4 控制层设计
国内外关于车辆横、纵向控制的研究已较为成熟[9],本文主要对已有的控制方法进行应用。控制层分为纵向控制与横向控制。纵向控制包括CACC、ACC、CC,横向控制为LCC。纵向控制中:CACC以速度信息与车间距信息作为控制输入;ACC 以车间距信息作为控制输入;CC 以固定速度作为控制输入。CACC 的稳定性较传统的ACC 更优[10],故本文应用CACC作为队列稳定行驶控制方法。
本文应用的CACC 采用车辆队列的前车-领航车-跟随车(Precessor-Leader-Follower,PLF)式通信拓扑结构,队列跟随车可获取前车与领航车的状态信息,如图9所示。

图9 车辆队列PLF通信拓扑结构
CACC 控制器通过车车通信技术获取前车与领航车的车辆状态信息,并将其作为控制输入,以提高车辆队列行驶稳定性。其控制模型如图10所示,首先将实际车间距与期望车间距的差值ei作为PID控制模块的输入并输出期望加速度ades,然后通过积分运算得到期望速度vdes。期望车间距ldes求解过程为:

图10 CACC控制模型
式中,h1为加速度系数;al为领航车加速度;h2为速度系数;vi为自车速度;l0为最小安全车距。
本文试验平台采用的队列控制器分布于车端,算力有限,所以采用对算力要求低但控制效果良好的PID控制算法[11]。
在车辆入队过程中或在隧道等特殊场景下,通信质量无法保证,因此,本文采用ACC、CC 弥补CACC过度依赖通信的缺陷。
在车辆横向控制中,为避免队列车辆因过度依赖GPS 信号造成在GPS 信号较差时发生安全事故,本文通过道路跟踪方法(Road Following Method)实现队列车辆沿车道稳定行驶。队列车辆横向控制采用纯跟踪(Pure Pursuit)算法[12],如图11 示,以自车为原点A建立坐标系,其中,车辆行驶方向为Y轴正方向,车辆前方的道路中心点B为预瞄点。
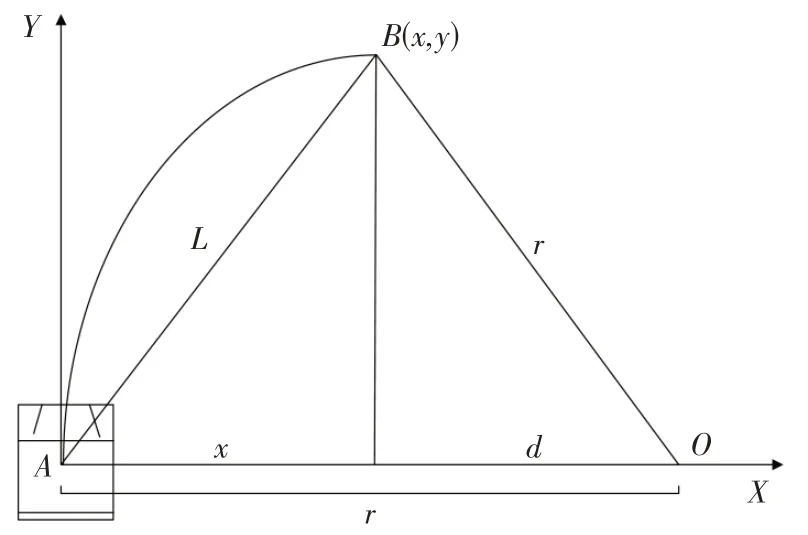
图11 纯跟踪算法控制原理
通过推导可得:
式中,(x,y)为预瞄点坐标;L为预瞄距离;r为车道线半径;δ为期望曲率。
为求解预瞄点横坐标x,需通过拟合预瞄点纵坐标y得出:
式中,C3i为道路曲率微分;C2i为道路曲率;C1i为车辆航向角;C0i为车辆到车道线的距离。
因采用摄像头感知方案求解y坐标较为困难,且预瞄距离L与预瞄点纵坐标y相差较小,故可直接用L代替y求得预瞄点横坐标x:
将x代入式(4),可求得期望曲率δ,将δ输入线控执行系统便可完成车辆闭环控制。
在车辆实际行驶时,单目视觉摄像头会出现单侧车道线数据质量过低导致数据不可用的情况,对此,本文设计了当单侧数据质量过低时仅使用另一侧车道线数据的策略,如图12所示。

图12 摄像头数据质量低时操作过程
4 试验验证
4.1 试验设计
采用3辆微型车作为队列试验平台的线控执行系统,如图13a 所示。其中车辆1 为领航车,车辆2、车辆3 为跟随车。所加装的硬件如图13b~13e 所示。
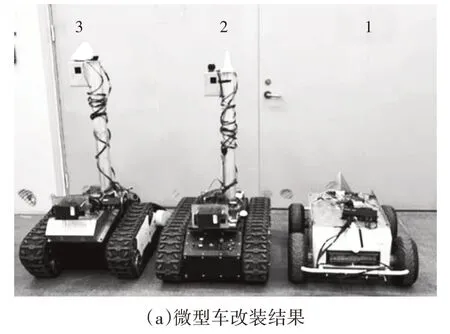
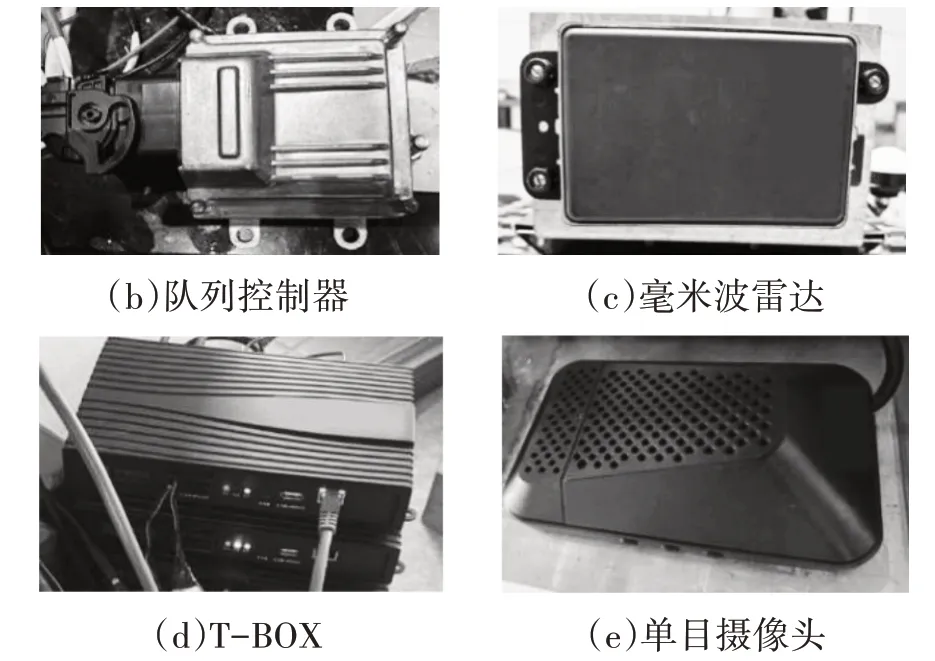
图13 微型车改装结果及部分硬件
试验路线由直道与弯道组成,总长95 m,如图14 所示。微型车依次进行车辆组队、车辆入队、队列稳定行驶试验。

图14 试验路线
4.2 试验结果与分析
采用3辆车的速度数据与跟随车的车间距数据对车辆队列控制效果进行分析,设计了综合队列功能验证场景与队列试验过程,速度、车间距数据如图15、图16所示:
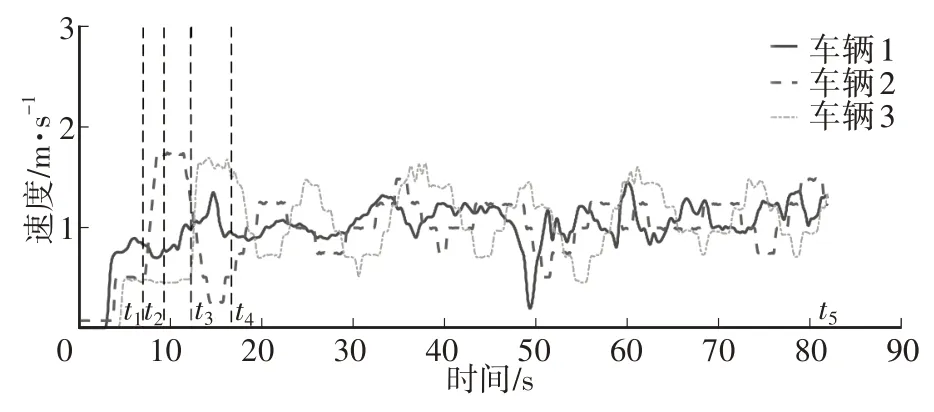
图15 队列车辆速度
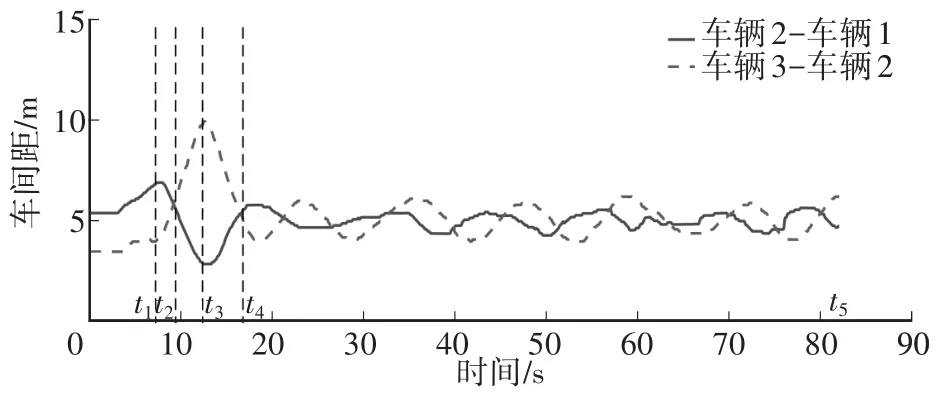
图16 跟随车与前车的间距
0~t1时刻:3辆微型车匀速自由行驶。
t1时刻:路侧设备发送组队指令,车辆2 收到入队指令并在车辆1同意组队后开始加速。
t1~t2时刻:车辆2 加速行驶,直到两车间距到达队列稳定行驶期望间距,随后车辆1 车与车辆2 开始队列稳定行驶,完成车辆组队。
t3时刻:路侧设备发送入队指令,车辆3 收到入队指令并在车辆1同意入队后开始加速。
t3~t4时刻:车辆3 加速行驶,直到与车辆2 的车间距满足队列稳定行驶期望间距,随后3 辆车开始队列稳定行驶,完成车辆入队。
t~t时刻:3辆车组成的队列进入稳定行驶状态。
因领航车控制采用手动遥控方式,且试验路线包括弯道,故无法保证领航车完全匀速行驶。跟随车的距离误差、速度误差如图17所示。通过各跟随车之间的间距误差、速度误差数据对稳定行驶试验结果进行分析,可知车间距误差区间为-1~1 m,速度误差区间为-1~1 m/s。误差区间处于队列系统误差可接受范围,能够较好地实现队列稳定行驶。由图17 可知,在第48 s,当领航车经过弯道造成速度突变时,两跟随车速度随之变化,并能够在速度调整后继续保持队列稳定行驶。

图17 队列稳定行驶试验结果
5 结束语
本文设计并开发了基于基础驾驶辅助功能车辆的队列试验平台,实现了试验平台的扩展与多场景切换。在软件系统中依据车辆角色与功能场景判断当前车辆所要执行的控制策略,实现了队列车辆不同功能场景的切换。同时,使软件系统具备了模块化特性,使该平台具备了较强的可扩展性,易于增添更加复杂的功能场景。本文基于3辆微型车完成了智能网联车辆队列试验平台的搭建,并且在包括直道、弯道的实际道路场景中开展了车辆队列从静止到连续功能场景的试验验证,且速度控制误差在±1 m/s 内。试验结果表明,该试验平台具备基础队列功能,且能够满足复杂控制策略的试验验证需求。
致谢
本研究工作受国家自然科学基金青年科学基金项目(编号52002209)资助。本研究工作受汽车安全与节能国家重点实验室开放基金课题(编号KFY2210)资助。
