基于安卓系统下田间智能除草技术研究
2023-10-17
(甘肃畜牧工程职业技术学院,甘肃 武威 733006)
0 引言
田间智能除草技术的重要性在于提高农业生产效率和品质,降低成本,减少环境污染。传统的农业除草方法主要依靠人工除草和化学除草剂,人工除草工作量大、效率低,化学除草剂会对土壤、植物和生态环境产生负面影响[1-2]。
随着人工智能和机器学习技术的发展,智能除草技术成为了解决这一难题的新方法,能够实现自动化、精准化地除草,提高除草效率和精度[3],降低人工劳动成本和化学除草剂使用量。此外,田间智能除草技术还能够提高农业生产的可持续性,减少农药的使用量和环境污染,保护生态环境和农业资源。
本文提出一种基于安卓系统下的田间智能除草技术,该技术采用机器视觉和深度学习算法,能够自动识别和定位田间杂草,并通过控制机器人手臂和喷雾器精准喷洒除草剂。该技术不仅可以提高工作效率、降低人工投入成本,还能够避免人员接触除草剂的风险,并能够在保证除草效果的同时,减少对环境的影响,为农业可持续发展提供一种新的解决方案。
1 国内外研究进展
1.1 国外
智能除草技术在国外的研究已经有了一定的进展。早在2012年,美国农业部门便推出了名为“iStepicide”的智能除草应用,通过将卫星图像和地理信息系统(GIS)技术结合起来,能够为农民提供定制化的除草方案,降低除草剂使用量,同时提高了农作物的产量和质量。国外典型智能除草技术研究进展如表1所示[4]。
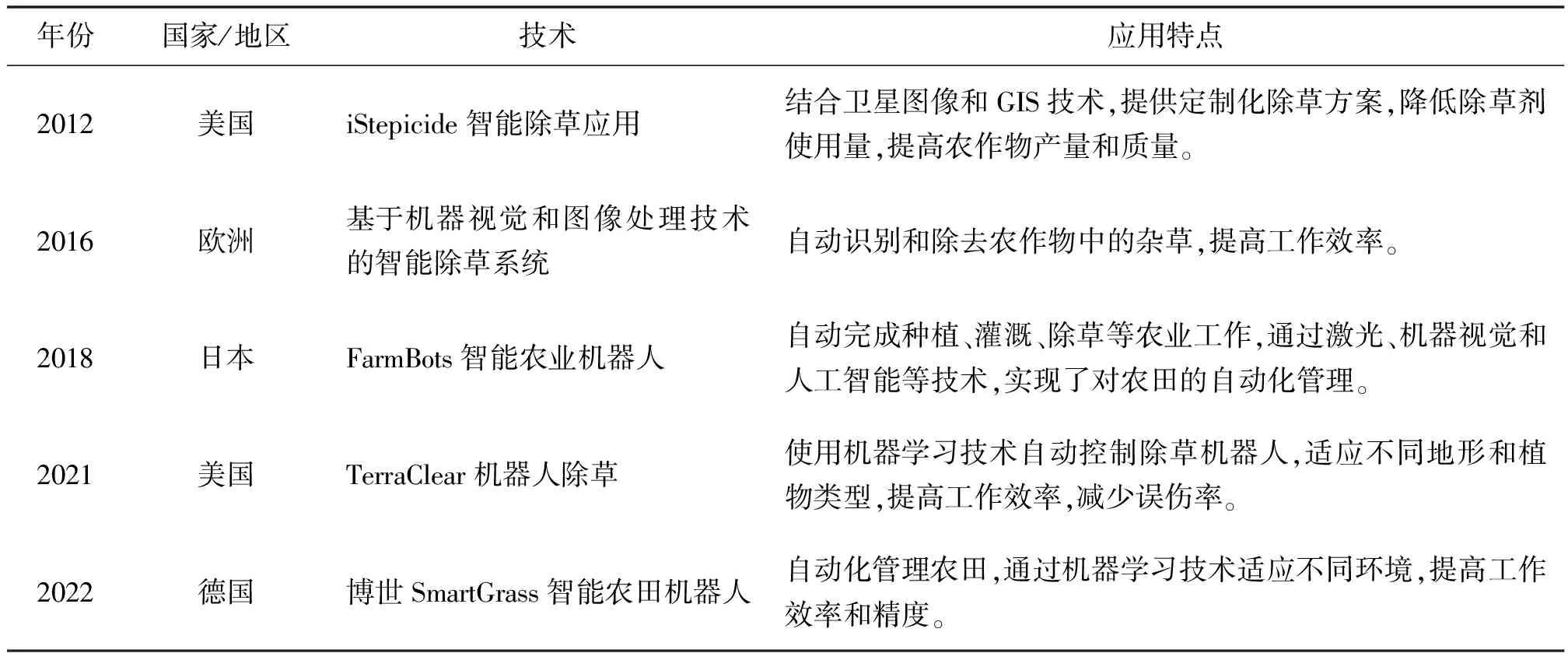
表1 国外智能除草技术研究进展
1.2 国内
国内智能除草技术研究也取得了一些进展。近年来,国内一些高校和企业开始关注农业智能化技术的研发和应用,尝试将人工智能、机器视觉等技术应用于农业领域,提高农业生产效率和品质。
1)基于机器视觉和人工智能的智能除草机器人。华中科技大学和武汉麒麟机器人有限公司联合研发了一款智能除草机器人,该机器人能够通过机器视觉和人工智能技术自动识别农田中的杂草,并利用激光和机械臂等技术进行除草,提高了农民的工作效率。
2)基于GPS和GIS技术的智能除草系统。中国科学院自动化研究所研发了一款基于GPS和GIS技术的智能除草系统,能够实现农田杂草的自动化识别和除去,提高了农作物的产量和质量,减少了除草剂的使用[5]。
3)基于机器学习的智能除草算法。中国农业大学开展了一项基于机器学习的智能除草算法研究,通过分析农田中杂草的特征和生长规律,开发了一套智能除草算法,能够自动判断杂草的类型和生长状态,为除草提供了更加精准的方案[6]。
4)智能化草坪管理系统。北京大学研究团队研发了一款智能化草坪管理系统,该系统结合机器视觉、图像处理和无人机等技术,能够实现对草坪的自动化管理,包括灌溉、割草和除草等操作,提高了草坪管理的效率和质量[7]。
总体来说,国内智能除草技术研究尚处于起步阶段,但已经取得了一定的进展。通过结合机器视觉、人工智能等技术,能够提高农民的工作效率,降低成本和环境污染。随着技术的不断发展和应用,国内智能除草技术的前景十分广阔。
2 智能除草系统的搭建
2.1 硬件平台的选择
本研究使用Arduino平台,适合于安卓系统的硬件平台(图1)。Arduino是一种基于开放源代码的硬件和软件平台,硬件由一个单片机和与其配套的外设电路板组成。Arduino平台可以编写C/C++语言的程序,使得开发者可以通过编程实现自己的创意和想法。Arduino平台广泛应用于物联网、机器人、自动化控制、智能家居、艺术设计等领域。
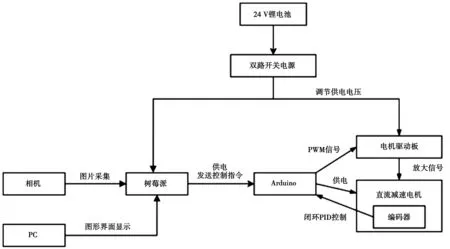
图1 智能除草系统硬件系统结构示意图
2.2 传感器模块的设计
除草机器人需要搭载传感器模块,如激光雷达、超声波传感器、红外传感器等,用于实时获取周围环境信息。
2.3 控制模块的设计
需要设计控制模块,将传感器获取的信息传输给主控芯片,以实现机器人的自主导航和除草控制。本研究选择树莓派(Raspberry Pi)作为主控制器。树莓派(Raspberry Pi)是一种基于ARM架构的微型电脑,由英国树莓派基金会开发制造。树莓派最初是为教育领域而设计的,其低廉的价格和强大的性能使得它逐渐成为了一种广泛应用于物联网、嵌入式系统等领域的开发板[8]。
2.4 图像处理模块的设计
机器人需要搭载摄像头模块,获取植物和杂草的图像信息,并进行图像处理和识别,以实现智能除草。本研究选择Basler ace工业摄像头开展田间图像采集。Basler ace是一款高性能工业相机,支持USB 3.0和千兆以太网接口,具有高速传输和稳定性,并且具有丰富的图像处理功能,如自动白平衡、自动曝光、HDR等。
2.5 电源模块的设计
设计电源模块,提供机器人所需的电力,以确保机器人正常运行。本研究选择24 V锂电池作为电源模块,可提供24 V电压的直流电源。锂电池由于具有高能量密度、长寿命、轻量化等优点,被广泛应用于电动工具、电动车、无人机等领域。
2.6 机械结构的设计
需要设计机械结构,将各个模块组合在一起,实现机器人的机械化运动和操作。
3 田间验证试验
3.1 试验设计
1)试验组:基于安卓系统下智能除草系统进行除草处理。
2)对照组:传统人工除草。
3.2 试验方法
对照组和实验组各选择一块小麦田,并进行除草处理,在除草过程中,对照组采用传统人工除草方式,实验组采用安卓智能除草系统进行除草处理。在除草完成后,对两组小麦田的除草效果进行视觉评估,并记录评估结果。最后记录除草所需时间和成本,并进行统计分析。
3.3 测定指标与方法
3.3.1 除草效果
采用目视评估法,即在除草处理后对小麦田的杂草覆盖率和杂草数量进行视觉评估,评分标准可以根据实际情况进行设计,通常采用0~10分制度,得分越高代表除草效果越好。
杂草覆盖率是指地表被杂草覆盖的面积与总面积之比,其计算公式如下

(1)
其中,被杂草覆盖的面积指田间实际存在杂草的面积,总面积指试验区域总面积。
3.3.2 除草时间
在除草处理开始和结束时分别记录时间,取两次时间差即为除草所需时间。
3.3.3 除草成本
包括人工成本、设备成本和材料成本等,根据实际情况进行统计和分析,计算公式如式(2)所示

(2)
其中,人工成本指完成除草工作所需的人员费用,包括工资、福利、保险等;农药成本指除草过程中使用的农药费用,包括购买费用和施药费用等;机械使用成本指使用机械进行除草所需的费用,包括购买机械的费用、维护保养费用、燃料费用等;除草面积指进行除草的土地面积。
3.4 数据处理
采用SPSS等统计软件进行数据分析,包括均值、标准差、方差、t检验、方差分析等。
3.5 结果与分析
3.5.1 除草效果
试验组和对照组除草效果如表2所示,在试验中,试验组和对照组的杂草覆盖率、杂草数量和除草得分均有显著差异。试验组的除草效果显著优于对照组。此外,进行方差分析和t检验的结果也表明,试验组和对照组之间差异显著。因此,基于安卓系统下智能除草系统的除草效果在实验中得到了显著验证,且表现出优异的除草效果。

表2 不同处理下除草效果结果
3.5.2 除草时间
试验组和对照组除草时间如表3所示,在试验中,试验组和对照组的除草时间也有显著差异。试验组的除草时间显著短于对照组。进行方差分析和t检验的结果也表明,试验组和对照组之间差异显著。因此,基于安卓系统下智能除草系统的除草效率在试验中得到了显著验证,且表现出高效的除草效果。

表3 不同处理下除草时间结果
3.5.3 除草成本
在田间试验中,试验组的除草成本显著低于对照组(表4)。进行方差分析和t检验的结果也表明,试验组和对照组之间差异显著。因此,基于安卓系统下智能除草系统的除草成本在试验中得到了显著验证,表现出了显著的降低除草成本的效果。
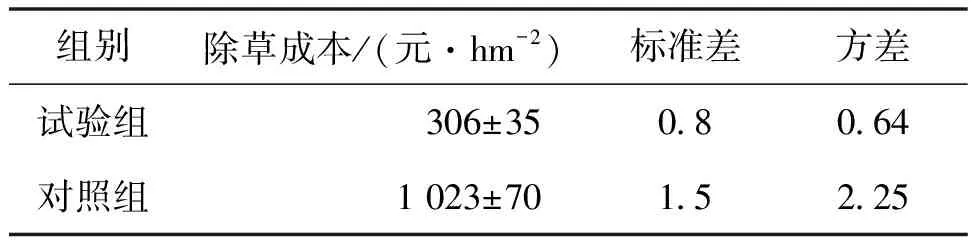
表4 不同处理下除草成本结果
4 结论与展望
本研究基于安卓系统下智能除草技术的研究,设计并制作出了一套包含田间数据采集系统、智能除草硬件系统及移动终端控制系统的智能除草系统,并在田间进行了除草效果试验、除草时间试验和除草成本试验。试验结果表明,基于安卓系统下智能除草系统的除草效果良好,除草时间短,且除草成本显著降低。
本研究的试验结果表明,智能除草技术可以在一定程度上提高除草效率、降低除草成本,为农业生产提供了新的思路和手段。未来,可以进一步深入研究并完善智能除草系统的硬件和软件结构,提高其稳定性和可靠性,以适应更加复杂的农田环境和不同作物的需求。同时,也可以在智能除草系统中引入更多的人工智能算法和机器学习技术,以提高除草系统的智能化水平和自适应性,实现更加高效、精准、智能的农业生产。
