多机械臂设计及协作试验研究
2023-10-16俎汉杰
俎汉杰
(浙江工商大学,浙江 杭州 310018)
21世纪以来,世界各国的综合国力竞争更明确地建立在高科技水平的基础上[1]。在先进机械制造技术、现代控制技术以及信息技术的有力支撑下,机器人技术飞速发展,成为现代高科技领域中的重要组成部分[2]。世界上主要发达国家都大力发展机器人技术,以提高生产率和降低人工成本,从而在激烈的国际竞争中占据有利地位。随着综合国力不断增长,我国的机器人技术也飞速发展,在机器人本体制造、机器人控制以及多机器人协调等方面都取得了丰富的研究成果[3]。以机械臂为主的工业机器人是工业生产线和复杂场景中作业的核心单元。而执行、高效完成复杂任务依赖多个机械臂的协调和配合[4]。因此,单个机械臂本体的设计和多机械臂协调作业的研究对提高我国机器人技术水平具有非常重要的意义。
1 机械臂的结构设计
该文的核心研究目标是多个机械臂的协作作业。要完成该研究工作,就要依赖于单个机械臂本体的结构设计、机械臂运动过程中的路径规划。因此,先给出单个机械臂的本体结构设计,如图1所示。

图1 机械臂本体的结构设计
由图1 可知,机械臂的主体部分是1 个三臂长的结构。在视图方向上,处在垂直方向上的机械臂构成单元是第一段臂长,其长度为300 mm,宽度为60 mm;第二段臂长与第一段臂长通过第一关节O1相连,第二段臂长的长度为200 mm;第三段臂长与第二段臂长通过第二关节O2相连,第三段臂长的长度为150 mm;第一段臂长的下方配置1 个底座,底座可以直接放在运动小车上,从而使机械臂整体具有移动能力,如果不需要机械臂整体具有移动能力,就将底座放置平稳,使其具有静态稳定性,便于各段机械臂作业;第三段机械臂的末端可以连接作业装置,例如焊枪、机械手等,从而使机械臂具有最终的作业处理能力(要根据执行任务的目标来决定配置相应的作业装置)。
2 机械臂运动中的路径规划
考虑机械臂在复杂场景中作业,必须具有整体的移动能力。因此,该文考虑机械臂底座安放在运动小车上的情况。为了确保机械臂运动的安全性和平稳性,需要对配置了运动小车的机械臂整体进行路径规划(基于人工势场法的机器人路径规划)。
在移动机器人的行进过程中,始终要向任务目标前进,即便因路径可行性问题可能出现短时间的偏离或远离,但是总体上是不断向目标位置靠近的,相当于被目标位置吸引。在移动机器人的行进过程中,会遇到界限、阻挡以及动态障碍物等。出于机器人自身安全起见,必须躲避、远离或者绕开这些界限、阻挡和障碍物。因此,这些界限、阻挡以及障碍物相当于不断地给移动机器人提供排斥力。移动机器人运动的过程就是在引力和排斥力的综合作用下,不断调整和优化路线的过程,以确保这个路线是最短、最佳或最合理的。
基于人工势场法的路径规划就是根据引力和斥力的产生原理,由规划者人为地给目标、障碍分别施加引力范围和斥力范围。当然,在算法执行的过程中,引力范围和斥力范围是由程序施加的。引力作用一般是终点位置提供给机器人的,通过程序设定也可以在场景中设置必须经过的点,这些点也为机器人提供引力作用。斥力作用就比较明显,机器人不能行走通过的区域、必须躲避的障碍物都对机器人具有斥力作用。人工势场法通过明确这些作用效果,在整个场景中形成明确的引力范围和斥力范围,再结合可以行进的路径信息就可以进行路径规划了。
与目标位置的引力作用效果相比,障碍物等形成的斥力作用效果对机器人的运行安全性具有更大的影响。因此,在人工势场法的执行过程中,针对每个可能产生斥力作用效果的点位都要外加一个最小安全距离。当机器人距离障碍物接近这个最小安全距离时,算法就会报警,提示机器人躲避或者绕行。
从斥力的形成过程也可以明显看出,斥力的作用效果与机器人到障碍物之间的距离是成反比的。这个距离越近,障碍物对机器人提供的排斥作用就越明显。这个距离越远,障碍物对机器人提供的排斥作用就削弱。根据上述对斥力、斥力形成过程以及斥力作用效果的分析构建斥力函数,如公式(1)所示。
式中:Wr为障碍物形成的斥力场所具有的势能;η为障碍物形成的斥力场的特征正常数;σ为移动机器人到斥力源之间的实际距离;σ0为斥力源形成的斥力范围的距离。
由公式(1)可知,斥力源对移动机器人形成的斥力作用不会一直存在,当二者之间的距离超过了斥力源的作用范围时,移动机器人受到斥力源的斥力作用效果就是0。如果二者之间的距离恰好介于斥力源的作用范围内,就需要根据公式(1)中的第一个算式计算移动机器人受到的实际斥力。在这个过程中,当移动机器人和斥力源的距离接近0 时,移动机器人受到斥力源的作用效果将达到最大。
构建人工势场法的基础包括斥力源的斥力作用以及目标位置、必经点所提供的引力作用。从算法的角度来看,为了确保移动机器人不偏离正确的行驶位置,移动机器人距离引力源的距离越远,引力源所提供的引力就越大。根据上述对引力、引力形成过程以及引力作用效果的分析构建引力函数,如公式(2)所示。
式中:Wa为目标位置、必经点对移动机器人所形成的引力场的势能;Ka为引力源形成的斥力场的特征正常数;X为移动机器人在整个场景中所在的实际位置;Xg为移动机器人需要到达的目标位置;σ(X,Xg)为移动机器人的当前实际位置和目标位置或必经点之间的距离,σ(X,Xg=|X-Xg);Fa为移动机器人受到的实际的吸引力,Fa=Ka×σ(X,Xg)。
引力源给移动机器人提供的引力作用效果的方向始终是指向目标位置的。当机器人距离目标位置较远时,引力的作用效果就比较大。随着机器人越来越靠近目标位置,这个引力的作用效果就不断变小。当机器人到达目标位置时,这个引力作用效果降至0。
3 多机械臂的协作作业试验与仿真
通过复杂场景下多机械臂在移动中完成协作作业的试验来验证该文研究工作的有效性。
为了完成移动机器人作业的可视化研究,选择C++程序设计语言结合OpenGL 的融合开发技术。OpenGL 是行业领域中最广泛接纳的2D/3D 图形API。OpenGL ™是独立于视窗操作系统或其他操作系统的,也是网络透明的。在CAD、内容创作、能源、娱乐、游戏开发、制造业、制药业以及虚拟现实等行业领域中,OpenGL ™帮助程序员在PC、工作站以及超级计算机等硬件设备上开发高性能、极具冲击力的高视觉表现力图形处理软件。
在OpenGL 的基础上还有OpenInventor、Cosmo3D 以及Optimizer 等多种高级图形库。其中,OpenInventor 应用最广泛,该软件是基于OpenGL 面向对象的工具包,提供创建交互式3D 图形应用程序的对象和方法,提供了预定义的对象和用于交互的事件处理模块,创建和编辑3D 场景的高级应用程序单元,具备打印对象和用其他图形格式交换数据的能力。
复杂场景下多器人协作完成物料搬运的仿真结果如图2所示。由图2 可知,场景中存在复杂的障碍信息(用多个圆锥表示)。场景中同时存在3 个机械臂,被抓取和搬运的物料是1 根长度较长的圆柱形物料。如果1 个机械臂搬运,就无法保持平衡。根据作业任务的难度,最后选择2 个机械臂完成抓取任务。

图2 仿真试验场景一
在抓取物料后,2 个相互配合的机械臂要通过路径规划离开复杂的场景,结果如图3所示。
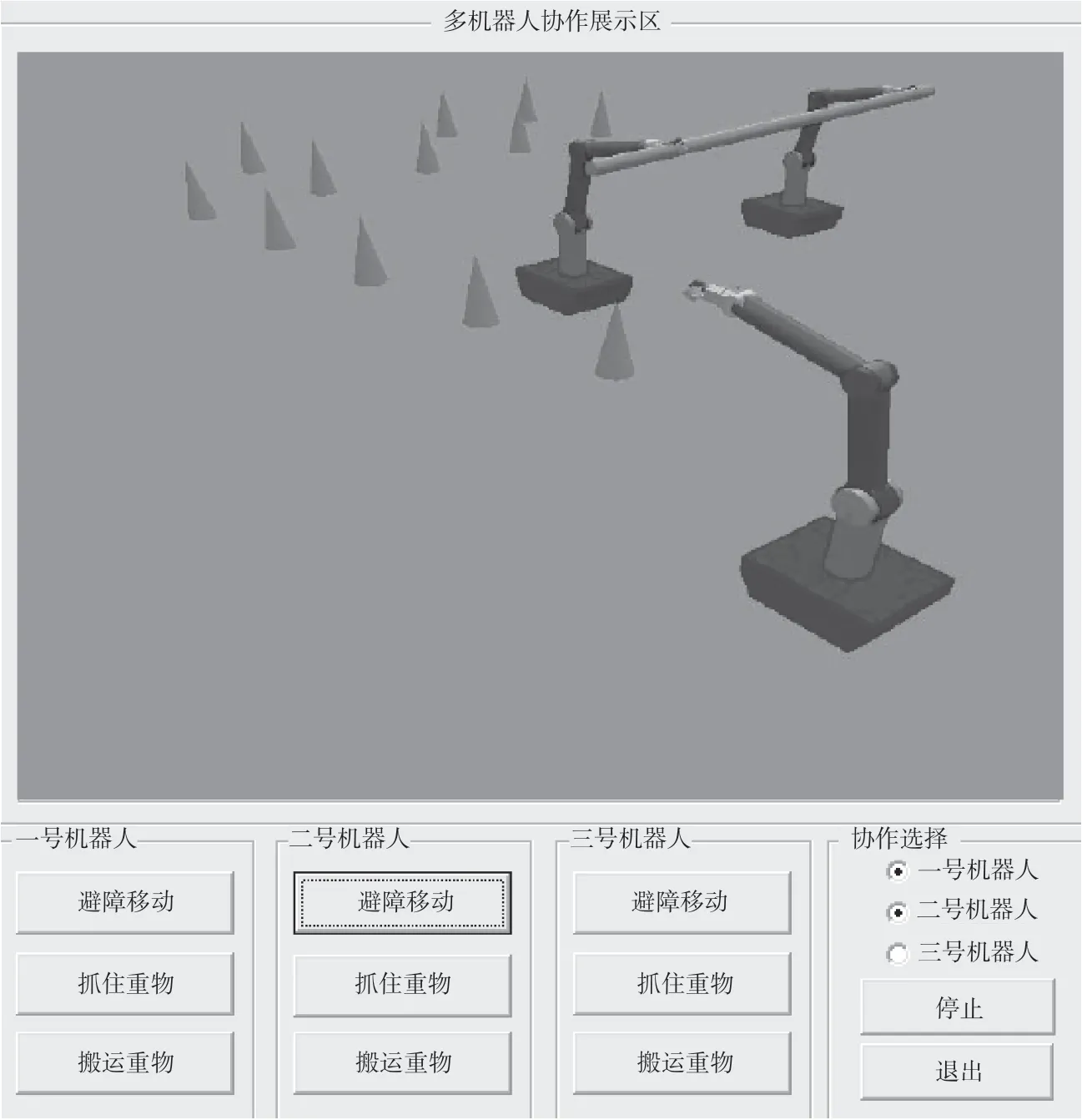
图3 仿真试验场景二
对比图2 和图3 可知,背景场景、障碍信息都没有发生变化,2 个协作配合的机械臂在底座下配置运动小轮并基于人工势场法的路径规划成功地躲避障碍,而长圆柱形物料也一直平稳地把持在2 个机械臂的手爪中。
通过这组仿真试验充分证明了该文设计的机械臂本体结构的合理性、路径规划方法的有效性、多机械臂完成协作作业和躲避障碍行进的技术可行性。
4 结语
机器人技术是代表时代发展方向的关键科学技术,是衡量机械制造业、控制技术发展水平以及国家综合科技实力的重要标尺。该文设计了1 个三分段机械臂的本体结构,并基于人工势场法分别构建了斥力函数和引力函数,为机器人作业过程中的路径规划奠定了基础。在仿真试验的过程中,以复杂场景为作业背景,以3 个可移动的机械臂协作作业为试验对象。试验结果表明,该文设计的机械臂结构合理,多机械臂协作作业较好地完成了复杂场景下的物料抓取和搬运任务。
