一种三梁结构六维力传感器设计与研究
2023-10-14汪志强
汪志强
(台州中清科技有限公司,浙江 台州 318000)
0 引言
六维力传感器能够同时测量三维空间的全力信息,是机器人力控系统中最重要的传感器之一[1],在机器人示教、轮廓跟踪、精密装配、打磨抛光等作业中有广泛的应用[2-3]。弹性体作为六维力传感器的核心元件,其结构直接影响传感器性能[4-5],三梁式弹性体结构具有体积小、结构紧凑、成本低等优点[6],有利于六维力传感器的产业化发展。但目前国内绝大部分的研究都集中在十字梁式弹性体和并联式弹性体结构上,对三梁式弹性体结构的研究寥寥可数。因此对三梁式弹性体结构进行分析研究显得尤为重要。
1 弹性体设计及其应变分析
设计的三梁式弹性体结构如图1所示,包含外圈法兰、中心台、浮动梁、应变梁,其中3根应变梁互成120°夹角。S1~S12为应变片,其中S1/S3/S5贴于应变梁上表面,S2/S4/S6贴于应变梁下表面,S7/S8/S9/S10/S11/S12贴于应变梁侧面。

图1 三梁式弹性体结构
当弹性体受到正向Fx作用时,应变梁CD、EF侧面产生弯曲应变,位移如图2(a)所示,其中应变片S9、S12受拉,应变片S10、S11受压;当弹性体受到正向Fy作用时,应变梁AB、CD、EF侧面产生弯曲应变,位移如图2(b)所示,其中应变片S7、S10、S12受拉,应变片S8、S9、S11受压;当弹性体受到正向Fz作用时,应变梁AB、CD、EF上下表面产生弯曲应变,位移如图2(c)所示,其中应变片S1、S3、S5受拉,应变片S2、S4、S6受压;当弹性体受到正向Mx作用时,应变梁CD、EF上下表面产生弯曲应变,位移如图2(d)所示,其中应变片S3、S6受拉,应变片S4、S5受压;当弹性体受到正向My作用时,应变梁AB、CD、EF上下表面产生弯曲应变,位移如图2(e)所示,其中应变片S2、S3、S5受拉,应变片S1、S4、S6受压;当弹性体受到正向Mz作用时,应变梁AB、CD、EF侧面产生弯曲应变,位移如图2(f)所示,其中应变片S7、S9、S11受拉,应变片S8、S10、S12受压。对应变梁上下表面及侧面在六轴载荷作用下的弯曲应变分别进行整理,如图3(a)和图3(b)所示。
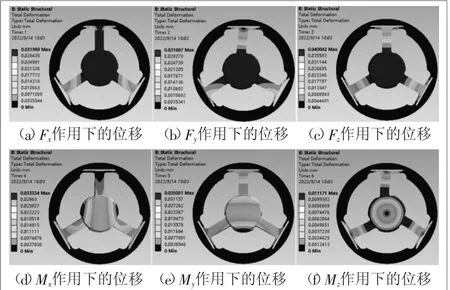
图2 弹性体在各轴载荷作用下的位移云图

图3 应变梁在各轴载荷作用下的应变分布
2 组桥设计及解耦计算
根据上述应变片在各载荷分量作用下的输出特性,设计惠斯通半桥电路(如图4),应变片位于桥路邻边,并与2个相同阻值的常规电阻R组成惠斯通半桥电路,桥路供电电压为U,输出电压为SG。
以桥路SG1为例,当施加+Fz方向力时,应变片S1受拉阻值增大ΔR,应变片S2受压阻值减小ΔR,则SG1的输出为
式中:SG1为输出电压;R为桥路电阻;U为供电电压;K为应变片灵敏系数;εFz1为应变片S1/S2的平均应变量。
其他载荷分量作用下的桥路输出亦可得到类似结果,如表1所示。
根据式(1)和表1,可定义各载荷分量作用下的名义输出电压U:
六维力传感器力矩阵与输出电压矩阵有如下关系:
式中:F为六维力传感器力矩阵;B为初始解耦矩阵;U为名义输出电压矩阵;K为系数矩阵;SG为桥路输出电压矩阵;B′为变形后的解耦矩阵。
因此,六维力传感器标定时,可通过额定受力矩阵F和桥路输出电压SG求解变形后的解耦矩阵B′,简化标定计算步骤。
由最小二乘法可得
3 有限元仿真验证
将设计的三梁式弹性体结构导入ANSYS仿真软件中,尺寸参数及材料参数如表2、表3所示,应变片S1~S12位于距中心台1 mm处。外圈法兰底面施加固定约束,中心台施加载荷,共计10个载荷步,载荷步详情如表4所示。其中载荷步1~6为单轴标定载荷,用于求解解耦矩阵B′,载荷步7~10为复合载荷,用于验证解耦矩阵B′。

表3 弹性体材料参数

表4 各载荷步载荷分量详情
因为桥路输出电压SG与应变片应变εF成正比,且比例系数KU/2为定值,所以可使用εF作为SG的值进行仿真验证。求解载荷步1~10,得到应变片S1~S12的应变量,计算汇总后得到桥路输出电压SG如表5所示。根据式(8)进一步计算,可得到名义输出电压U,如表6所示。

表5 各载荷步输出电压SG详情

表6 各载荷步名义输出电压U详情
观察表6单轴加载时(即载荷步1~6)的名义输出电压,综合如图5所示,主对角线的值远大于其余值,反映了名义输出电压与对应单轴载荷的强相关性,进一步证明了式(2)~式(7)的表征作用。
由表4、表5载荷步1~6中的载荷分量F和输出分量SG可求得变形后的解耦矩阵B′:
为了验证上述解耦矩阵的正确性,将表5载荷步7~10输出分量SG′6×4及B′代入式(9),求得验证载荷F′6×4:
对比表4载荷步7~10载荷分量与解得的F′6×4,可以发现两者基本无误差。从而验证了该六维力传感器设计方案和解耦方法完全可行。
4 结语
本文设计了一种三梁式六维力传感器,在各轴载荷作用下,对传感器弹性体进行了应变分析,并以此为基础设计了组桥电路,详述了名义输出电压的计算与简化求解解耦矩阵的方法,最后通过ANSYS仿真软件验证了本文设计方案及所提解耦方法的可行性,为后续该结构类型六维力传感器的优化设计奠定了基础。