复杂环境下雷达抗干扰及多功能一体化波形设计方法研究
2023-10-11李淳泽
范 文,李淳泽,赵 勇,张 航
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引言
随着卫星、无线电台、电视、雷达、通信、导航等各类服务和系统的广泛使用,不断增长的业务和应用使得有限的频谱资源供需矛盾日益突出,雷达工作的电磁环境也日益复杂。为避免雷达与其他电磁设备的相互干扰,提升雷达在复杂电磁环境的适应能力,需设计行之有效的雷达抗干扰技术[1-2]。目前雷达抗干扰技术主要解决方案有三类:一是开展电子系统综合一体化的研究,如雷达通信一体化研究,即雷达与通信系统共享同一频谱,同一硬件平台,研究一体化信号设计与处理以及系统集成方案来同时实现探测和通信双功能[2-4];二是基于波形设计的研究,即设计雷达波形时有意避开被其他系统所占用或干扰存在的频段,例如在其他系统占用(或干扰存在)的频带形成频谱零陷/凹口等[5-7];三是无源态雷达技术,即利用现有用频系统所发射的信号实现目标检测和参数估计[8]。
波形设计技术可使电子系统从发射端即赢得主动,根据系统工作的环境,通过不断调整发射波形以适应日益复杂的电磁环境,从而有效提升系统性能(如通信抗干扰性能,雷达目标检测、跟踪、成像及抗干扰等)。此外,高性能信号处理器件、任意波形产生器等的出现也为实时动态发射波形提供了可能[9-12]。基于此,本文从波形设计角度开展雷达抗干扰和多功能一体化波形设计方法研究。
1 研究现状
通常,雷达发射机的线性放大器的动态范围有限,幅度动态范围过大的信号极易进入功率放大器的非线性区域,导致信号产生非线性失真,造成带内信号畸变,进而导致整个雷达系统性能严重下降[13-14]。因此,为使雷达发射机在饱和状态工作,避免放大器等模拟器件的非线性导致波形失真,雷达系统一般趋向使用恒定幅度(或幅度动态范围较小)的波形。雷达波形需要具备低的自相关和互相关水平以避免接收信号间的相互干扰,此外,雷达需要具备灵活的发射波束图以应对不同探测需求。雷达波形模的幅度约束、自/互相关函数以及波束图均为非线性函数,使得雷达波形设计问题呈现出高维非凸的多约束优化问题,为处理非凸优化问题,本文总结了上界最小化(Majorization-Minimization,MM)方法[15]和交替方向乘子法(Alternating Direction Method of Multipliers,ADMM)[9-10]及其在波形设计中使用的思路和技巧。本文还总结了最为典型的发射多波形的多输入多输出 (Multiple Input Multiple Output,MIMO)[11-12,16-18]雷达单波形的单输入单输出(Single Input Single Output,SISO)[19-21]雷达抗干扰波形设计建模方法和优化策略,以期能为后续雷达抗干扰波形和多功能一体化波形设计研究提供参考和依据。
1.1 MIMO雷达波形设计
集中式MIMO雷达收发天线单元间间距较近,不同天线单元可独立发射不同波形,典型的集中式MIMO雷达,各个发射单元发射相互正交的波形[14]。MIMO雷达的波形分集特点使其自由度比相控阵雷达更大,例如:当雷达系统需要具备大的作用距离或者对目标进行跟踪时,集中式MIMO雷达可切换为每个天线单元发射相同波形的相控阵雷达体制,形成具有高增益的窄波束[14];当需要对空域中所有目标进行探测时,集中式MIMO雷达可切换为发射正交波形的MIMO雷达体制,形成覆盖全方向的宽波束,且通过适当布置发射和接收天线单元的位置可扩展天线的虚拟孔径(发射天线单元和接收天线单元位置的不同所形成的虚拟孔径也不同,M发N收可形成的最大虚拟孔径为M×N)[22-23];当目标方位先验已知时,MIMO雷达可发射介于相干和完全正交之间的部分相关波形,利用波形的相关性完成灵活发射波束图设计,使雷达辐射能量集中于指定方向[14]。通过灵巧地设计发射波形控制发射波束图,可增强目标回波,抑制背景杂波,显著提高雷达目标检测和参数估计性能[22-23]。
集中式MIMO雷达的波形分集特性具备了更高的目标分辨率、更好的参数辨识能力和抗截获能力[10,22-23]。另外,集中式MIMO雷达还可根据雷达工作的电磁环境和目标的动态变化自适应地设计发射波形以提高雷达在复杂多变的战场电磁环境中的适应能力[5-8]。本文总结了如下两类具有代表性的MIMO雷达波形设计问题:首先,为保障在频谱密集环境中工作的MIMO雷达系统的抗干扰性能[24],针对复杂电磁环境下宽带MIMO雷达发射波束图设计问题,本文提出了波束图匹配设计优化模型和最小峰值旁瓣波束图设计优化模型,以生成与复杂电磁环境相适应的MIMO雷达波形,进而提升雷达抗干扰性能(见第3节模型1~2);其次,当需对空域中所有目标进行探测时,MIMO雷达系统工作模式可切换为发射具有低自相关峰值旁瓣和互相关电平的正交波形,形成覆盖全方向的宽波束[5],本文提出了频谱约束条件下的最小自相关峰值旁瓣和互相关峰值电平的波形集设计模型,并根据分块逐次上界极小化(Block Successive Upper-bound Minimization,BSUM)算法框架[15]给出了求解思路(模型3)。
1.2 SISO雷达波形设计
当MIMO雷达所有发射天线发射同样的波形时,MIMO雷达等价为SISO雷达。因此,不同于MIMO雷达需同时设计多波形,SISO雷达仅需设计单波形,根据应用场景的不同,本文总结了几类典型的单波形设计问题[8]:① 若发射波形的模幅度变化很大,会遭受严重的能量损失或非线性失真[12-14]。此外,传统的波形频谱赋型方法均基于最小二乘拟合准则[6-7],仅仅关注了“总体”平方误差、无法兼顾峰值匹配误差,使得所设计的波形频谱形状可能具有大的峰值阻带水平和大的通带纹波,这对于谱干扰抑制极为不利。为此,本文给出了基于min-max的频谱赋形优化模型,以同时抑制峰值阻带水平和通带纹波(模型4)。② 雷达波形自相关峰值旁瓣水平对高分辨率雷达应用有显著影响[6]。本文在频谱和幅度约束下构造了自相关旁瓣精确控制模型(模型5)。③ 在诸如认知雷达[24]和机载雷达等应用中,除频谱兼容性和波形幅度动态范围要求外,波形还需具有图钉状模糊函数以满足对移动目标探测的需求。为此本文提出最小相似度设计模型以实现具有较低的模糊函数旁瓣水平和指定频谱零陷的探测波形(模型6)。
除上述MIMO雷达和SISO雷达波形设计建模外,本文还对上述模型的建模机理、求解方法进行了分析,给出了ADMM、MM以及ADMM+MM三种求解波形设计问题的优化手段和使用技巧。结合波形设计相似性约束的优良特性,本文创新性地将上述建模思路和优化方法应用于多功能一体化波形设计的两个实例(模型7~8),以期为未来多功能一体化波形设计提供有价值的参考。
2 问题建模思路与优化方法
雷达波形设计通常需转化为约束优化问题,约束条件由雷达工作的电磁环境和雷达本身的硬件限制等确定,是设计的前提;而目标函数描述了设计的目标。设计整体思路可分为4个基本步骤:① 根据雷达具体工作环境以及物理硬件限制等,确定波形的约束条件(如波形频谱约束、自相关约束、幅度约束以及功能约束等);② 根据具体探测任务确定目标函数(如波形模糊函数、MIMO雷达发射波束图等);③ 根据优化问题的目标函数和约束条件的特性确定优化方法,并针对性的推导有效的求解算法,以获得满足约束条件和设计目标的雷达波形;此步骤中涉及诸多信号处理和数学使用技巧,直接影响着波形设计方法的性能;④ 对算法性能分析和评估,如波形的模糊函数、自相关、频谱兼容性、波束图、算法复杂度和收敛性能等指标。实际设计中约束条件和目标函数相关指标可按需求灵活互换和组合。
2.1 常见约束条件
设离散化后雷达发射的波形为x=[x1,x2,…,xN]T∈N×1。其中,(·)T表示向量或者矩阵的转置,表示复数域,N表示波形离散点数。M个波形(序列)集合也可以写为矩阵的形式X=[x(1),x(2),…,x(M)]T∈N×M,其中,x(m)=[x1(m),x2(m),…,xN(m)]T∈N×1,m=1,2,…,M。
2.1.1 波形幅度约束
为避免放大器等模拟器件的非线性导致波形失真,雷达系统一般趋向使用恒定幅度(或幅度动态范围较小)的波形[9-11,15]。对于MIMO雷达而言,由于要求具备多个发射机以发射相互正交或部分相关的波形,每一路发射波形都满足恒定幅度或者具有较低的幅度动态范围将有利于简化雷达系统的硬件设计[25]。这种幅度约束通常有恒模(Constant Modulus,CM)约束,ε-不确定集(ε-Uncertainty Modulus)约束,峰值平均功率比(Peak-to-Average Power Ratio,PAPR)约束和离散相位约束等[25-27]。
CM约束:|xn|=ξ,n=1,2,…,N,其中,ξ>0表示波形x的模。
不确定集恒模约束:cn-ε≤|xn|≤cn+ε(cn≥ε≥0),其中,cn表示不确定集约束的中心,ε表示不确定集的不确定度,分别由用户确定。
离散相位约束:angle(xn)∈{φ1,φ2,…φK},n=1,2,…,N,其中,φ1,φ2,…φK为固定的离散相位。
相似性约束:在机载雷达及其他应用[12]中,除幅度动态范围约束外,雷达波形还需具有较好的模糊函数以提升动目标的探测性能。但直接添加模糊函数约束太过复杂,一种简单且有效的方法是在波形设计建模时添加相似性约束(Similarity Constraint,SC)使设计的雷达波形继承参考波形优良的模糊函数和动态范围等特性[7]。相似性约束定义为‖x-c‖p≤σ,其中,c表示参考波形,具有良好的模糊函数和幅度的动态范围,p=2或∞表示不同的相似性约束,参数σ控制相似度。
本文用模约束(Modulus Constraint,MC)统一表示上述的幅度约束:
MC(x)。
(1)
2.1.2 频谱约束

(2)

y=FH[x;0],
(3)
2.2 目标函数
2.2.1 MIMO雷达部分相关波形设计


(4)


q=-N/2,…,0,…,N/2-1,
(5)
其中:

(6)
fq=[1,e-j2πq/N,…,e-j2π(N-1)q/N]T∈N×1。
(7)
(8)
式中:yq=[y1(q),y2(q),…,yL(q)]T,am,q≜a(θm,q/(NTs)),X=[x(1),x(2),…,x(L)]T∈L×N。

(9)
常用的波束图设计准则有:① 波束图匹配设计准则[26],即设计波形X使得其波束图Pm,q或者(Pm)与给定的波束图模板相匹配;② 最小旁瓣设计准则[15],即设计波形X使得其波束图Pm,q的峰值旁瓣最小化;③ 主旁瓣比例最大化设计准则[15],即设计波形X使得波束图的主瓣积分相比于旁瓣积分最大化。
2.2.2 MIMO雷达正交波形集(序列集)设计
(10)



(11)
2.2.3 单波形(序列)设计
对于给定波形x≜[x1,x2,…,xN]T∈N×1,其自相关函数定义若波形x为周期的,其自相关定义为波形x的自相关积分旁帮和峰值旁瓣定义与波形集的定义相同,且是波形集相关性能衡量准则ISL和PSL的特例形式。
2.3 优化方法
近年来,ADMM和MM在信号处理、通信和机器学习等领域广泛应用以处理非凸优化问题。ADMM适用于大规模凸优化问题的求解[9],该方法将大规模优化问题分解成多个小规模的子问题,并以交替优化的方式确定原优化问题的解。此外,MM通过构造原非凸非光滑目标函数的上界函数,然后以迭代的方式求解上界优化问题,适用于大规模非凸优化问题[9-12,16-17]。下面介绍ADMM和MM优化框架。
2.3.1 ADMM
ADMM可处理具有复杂约束的优化问题,其具有对偶上升法强大的分解能力(变量分离、优化问题分裂等)和乘子法的快速收敛特性。研究表明,ADMM在许多非凸问题中也有出色的表现[10]。下面介绍ADMM算法框架,如针对优化问题:
(12)
类似于乘子法,ADMM首先构造增广的拉格朗日函数:
(13)
ADMM算法按如下规则更新:
(14)
(15)
λ(t+1):=λ(t)+Ax(t+1)+Bz(t+1)-c,
(16)
式中:t表示迭代次数。式(12)被分解成上述两个简单的子问题,即式(14)~(15),和一个乘子更新步骤式(16)。
该算法可处理多约束优化问题,对于凸问题,理论收敛已得到证明。但是当处理非凸优化问题时,其理论收敛性目前还没有文献给出。目前对于ADMM算法求解部分非凸优化问题的收敛性分析一般是首先证明增广的拉格朗日函数随着迭代进行是递减(增)的,即:
Lρ(x(t+1),z(t+1),λ(t+1))≤Lρ(x(t),z(t),λ(t)),
(17)
且增广的拉格朗日函数有下(上)界,即σ≤Lρ(x,z,λ)。通过上述两个结论可知,随着迭代进行,ADMM对非凸优化问题是收敛的。
2.3.2 MM
MM也属于迭代算法,可处理具有复杂目标函数但约束形式简单的优化问题。例如针对优化问题[11]:
(18)
(19)
(20)
其次,求解优化问题(最小化步骤(Minimization)):
(21)
经过上述两步,可有如下不等式:
(22)
即:原目标函数值非增。算法可通过有限次迭代趋于稳定(收敛),MM可处理复杂高次目标函数的优化问题,但通常上界函数难以构造,此外,该算法难以处理具有复杂约束的优化问题。
2.3.3 MM与ADMM混合算法
M-ADMM[17]可用于求解目标函数和约束条件均比较复杂的优化问题,以式(12)为例,算法的思路是通过MM框架构造该优化问题对应的上界优化问题:
(23)

(24)
(25)
构造式(23)对应的增广的拉格朗日函数,并根据ADMM更新规则式(14)~(16),更新优化变量。
M-ADMM算法收敛性分析的基本思路为:根据式(17)和式(22),可推导M-ADMM方法所构造的增广的拉个朗日函数值随迭代次数增加而减小,且有下界,进而可得M-ADMM算法是收敛的。
3 波形设计建模与优化问题求解思路
3.1 复杂电磁环境下MIMO雷达波形设计

(26)
式中:Θn表示波束图零陷的离散网格点集,其只包含干扰的频谱带宽和干扰空间方向。基于上述定义和讨论,构建频谱密集环境下宽带MIMO雷达发射波束图设计模型。
模型1:宽带MIMO雷达波束图匹配设计
当已知干扰的频谱范围,提出如下波束图匹配设计问题:
(27)
在Wm,q>0表示第m个方向角和第q个频率点对应的权重系数,D表示波束图模板(Dm,q=1,∀{m,q}∈Θm,Dm,q=0,∀{m,q}∉Θm,其中Θm表示离散网格点集),MC(x(l))表示第l个波形的模约束,如式(1)。
模型1求解思路:可以看到式(27)的主要难点是MC约束和目标函数中的求模运算。根据MM优化框架可以推导出式(27)对应的上界优化问题(主要作用是去掉目标函数中的求模运算),然后通过引入辅助变量yq=Xfq(可以看到目标函数和约束条件中都含有Xfq,且此项中fq为傅里叶变换的基,引入辅助变量yq便于后续运算和推导),并利用ADMM算法来求解该上界优化问题[17]。
模型2:宽带MIMO雷达最小旁瓣发射波束图设计
实际中,目标来波方向可能不精确,要求宽带MIMO雷达波束图主瓣满足d-以提升雷达探测的稳健性,其中d和(d>)分别表示主瓣电平和主瓣波纹项。此外,为降低雷达杂波对雷达检测性能的影响[17],本模型以最小化波束图峰值旁瓣为目标函数,针对干扰的空间方向和频段先验已知的情况建立如下设计问题:
s.t.d-,∀{m,q}∈Θm;
(28)
式中:Θs和Θm分别表示波束图旁瓣和主瓣的离散网格点集。由于MC和波纹约束d-形成了一个非凸的可行集,式(28)是非凸的。此外,由于目标函数中的max运算和取模操作该优化问题的目标函数是非光滑的。上述模型也可推广到窄带MIMO雷达最小峰值旁瓣与主瓣波纹控制设计。

模型3:复杂电磁环境下的正交MIMO雷达波形设计
(29)

(30)
利用序列的功率谱密度函数和其自相关函数互为傅里叶变换对,以及傅里叶变换矩阵的正交性,可将式(3)的目标函数简化为基于二范数度量的最小距离优化问题[28-29]:
(31)
3.2 复杂电磁环境下SISO雷达形设计
模型4:基于min-max准则的频谱赋形设计
不同于基于最小二乘的频谱赋形设计方法仅从整体考虑了波形频谱赋形误差[7],基于min-max准则同时抑制波形频谱阻带峰值水平和通带波纹提出如下优化模型:
s.t.MC(x),
(32)
式中:τm表示频谱模板,wm>0为第m个频点对应的权重参数。
模型4求解思路:式(32)与式(29)类似的目标函数,可用模型3相同的求解思路简化优化问题的目标函数,并利用傅里叶变换矩阵的正交性将优化问题化简为类似式(31)的形式。
模型5:峰值旁瓣精确控制设计
在无线通信和SAR等应用中,通常感兴趣目标回波的时延数大致已知,在波形设计过程中只需控制波形的特定自相关区域。此外,为保证雷达抗干扰能力,通常会在模型中加入频谱约束,建立如下优化问题以满足上述应用场景需求[6]:
|rn|≤δ,∀n∈Θs;MC(x),
(33)
式中:Θm和Θs分别表示需要最小化和精确控制的波形自相关旁瓣区域,δ表示波形自相关旁瓣区域Θs范围内所允许的最大值。
模型5求解思路:根据式(11),上述优化模型可写为带等式约束(r=F(|FHx|2))的优化问题,然后用ADMM求解[7]。
模型6:最小化相似性设计
除了低自相关峰值旁瓣,当雷达用于动目标探测时波形还需具类似于图钉状的模糊函数。但直接优化波形的模糊函数峰值旁瓣十分困难(4次目标函数和非凸波形幅度约束)[7]。为此,建立如下最小化加权l∞范数和l2范数相似性模型[7]:
(34)
式中:ρ∈[0,1]为用户定义的参数,通过设定不同的ρ可获得不同的目标函数,如当ρ=1时,是l∞范数模型,而ρ=0时获得l2范数度量。
模型6求解思路:求解思路同模型4。
4 多功能一体化波形设计建模
传统雷达、通信、导航等电子系统分立发展,使得各系统间的构成存在很大冗余,导致系统硬件、频谱、波形、处理等资源无法被充分使用,且各系统之间存在资源竞争,导致电磁兼容性差。系统一体化设计能够使各系统共享平台资源,克服分立发展导致的问题。如雷达和通信系统共用波形的方式能够使两系统共享系统硬件、频谱和功率等资源,从根本上克服跨系统干扰并提升资源利用率,已成为近年来的研究热点[3-4]。

(35)
上述分析表明,本文介绍的模型1~6,均可加入相似性约束,将MIMO/SISO雷达波形设计问题转化为多功能一体化波形设计问题[30]。
模型7:MIMO多功能一体化波形设计问题建模
同理,可以在模型1~3中加入相关的相似性约束,使设计的波形具备期望的发射方向图和特定的功能。以模型1为例,构建多功能一体化波形设计模型:
(36)

模型7求解思路:同模型1。
模型8:雷达通信一体化波形设计问题建模
根据对通信需求的分析,提出最小化自相关峰值旁瓣设计模型,实现探通一体波形设计:
s.t. ‖x-xc‖∞<σn,DRR(x)≤ζ,
(37)
同理,针对波形(序列)集设计,建立如下多功能一体化设计模型:
∀m|xn(m)|2=1,n=Nc+1,2,…,N,
(38)
式中:xc(m)表示第m个波形对应的参考波形。通过选取不同的参考波形,例如通信、导航、干扰等波形,可以实现多功能一体化波形的设计。
在式(36)~(38)中,参考波形xc(m)可根据需要适当选择;如需要实现探干一体化波形,xc(m),∀m可选择常用的干扰波形;若需要探干通一体化波形,可以选择xc(1),xc(2),…,xc(M)分别为通信波形、干扰波形,即选择不同得参考波形即可获得不同性能的多功能一体化波形。
模型8求解思路:同模型3。
下面通过仿真验证式(38)的有效性。仿真参数设置为M=2,N=4 096,Nc=2 048,p=20,σ1=σ2=σ。图1给出了当σ=0时两个波形的自相关函数和互相关函数,可以看出,波形的自相关旁瓣和互相关水平几乎相同,表明了波形具有较好的探测性能。图2绘制了不同σ时通信的误码率曲线,可以看到当σ=0时,实际误码率曲线基本与理论误码率曲线一致,而随着σ的增大,误码率性能会逐步退化,这也与本节理论分析一致;也可以看出,实际中相似性参数不用选择过大,否则会影响波形的通信性能(如σ=0.3时通信性能退化较为严重),从仿真结果来看σ=0.1是一个非常好的选择。

(a) r(1,2)

(b) r(1,2)
(c) r(2,1)
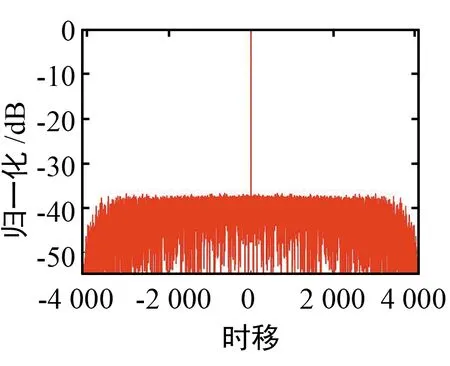
(d) r(2,2)图1 波形自相关函数和互相关函数(σ=0)Fig.1 Waveform autocorrelation and cross correlation function (σ=0)
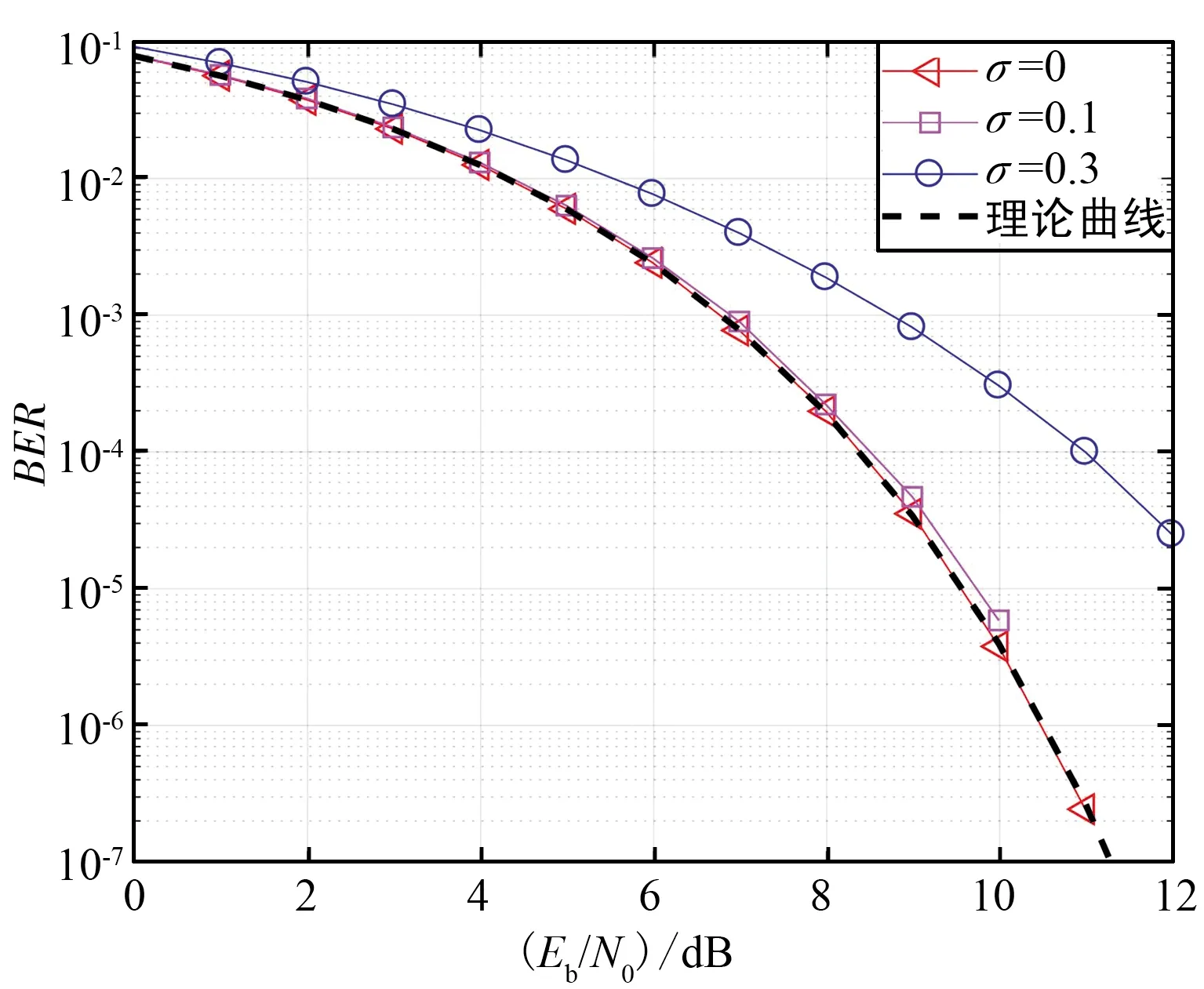
图2 不同σ时通信的误码率曲线Fig.2 Error rate curve for different simultaneous communications σ
5 结束语
本文总结了复杂电磁环境下雷达抗干扰波形设计建模与优化方法,对波形设计的约束条件、设计准则、指标等进行了细致的梳理和总结。还对ADMM和MM优化方法进行了简单描述,结合典型优化问题,给出了其在波形设计中的应用思路。本文建模思路和优化手段可为复杂电磁环境下雷达抗干扰波形设计、探测干扰一体化以及雷达通信一体化等多功能一体化波形设计提供有价值的参考。