基于Sentinel-1卫星SAR数据的2020年巢湖洪涝监测及灾情分析
2023-10-11朱璨阳李金超徐立晨徐杰铭涂丽丽
朱璨阳, 耿 君, 李金超, 徐立晨, 徐杰铭, 涂丽丽
(1.合肥工业大学 土木与水利工程学院,安徽 合肥 230009; 2.安徽省基础测绘信息中心,安徽 合肥 230031; 3.安徽农业大学 资源环境学院,安徽 合肥 230036)
洪涝灾害是对国民经济影响最严重的自然灾害之一,每年直接或间接造成的灾害损失占所有自然灾害损失的40%以上[1]。迅速分析受灾区域水情,评估洪水灾情状况,可为制定有效的洪涝灾害应对方案提供支撑。卫星遥感技术为洪水淹没范围的评估工作提供了先进的技术手段,在洪水淹没范围监测工作中具有大尺度、实时、动态等优点。
合成孔径雷达(synthetic aperture radar,SAR)采用主动式微波遥感系统,相较于传统的光学影像,SAR影像具有全天时、全天候和全覆盖三大优势[2],可有效提高水体变化监测的准确度,是提取洪水淹没范围、评估洪水灾害状况的高效工具[3-5]。常用的水体提取方法主要有阈值法、面向对象提取方法和传统的支持向量机(support vector machine,SVM)监督分类算法等。文献[6-7]采用SVM法提取水库和城区水体信息,结果表明该方法提取小型水体信息精度和准确率较高,但需先验知识判别,且仅适用于较小范围的高精度提取;文献[8]基于面向对象的方法提取研究区域不同灾害时期的Sentinel-1A 卫星SAR影像淹水范围,结果表明该方法提取结果含杂斑较少,提取效果较好,但该方法的分割尺度需通过实验反复验证得到,应用面较窄;文献[9-10]利用阈值分割法监测洪涝灾情,结果表明该方法在汛情监测和淹没面积评估方面具有较好的实用性。阈值法包括经验阈值法、最大类间方差阈值法和双峰法等,其中基于经验的阈值法最适用于利用Sentinel-1卫星影像提取洪涝灾害时的水体信息[11]。
受持续降雨的影响,2020年6—8月巢湖流域受灾情况严重,然而对于该时期巢湖流域洪涝灾情的相关研究较少。针对巢湖流域的实际条件,本文采用Sentinel-1卫星SAR影像数据,对比单阈值法、哨兵-1双极化水体指数(Sentinel-1 dual-polarized water index,SDWI)阈值法和SVM分类算法等3种水体提取方法的精度,选取最优方法对巢湖流域水体信息进行提取,进而获取巢湖流域洪水淹没范围;同时采用Landsat 8、Sentinel-2卫星中、高空间分辨率光学影像分析灾情期间各类地物的受灾程度,并分析巢湖流域的洪水特征,为灾后评估工作提供技术支持。
1 研究区概况与数据预处理
1.1 研究区概况
巢湖为我国五大淡水湖之一,是河成型湖泊,人类活动对其影响较为严重。巢湖流域处于长江和淮河两大水系,位于安徽省中部,湖区面积为760 km2,6—8月长江中下游月降水量一般为200~300 mm。2020年入夏以后,我国长江流域、淮河流域持续发生严重的洪涝灾害。自汛期以来,由于持续强降雨及上游来水等多重因素影响,巢湖水位不断抬升,达到150年以来峰值。本文以洪水汛期前后的巢湖流域为研究对象,分析该流域洪水淹没范围的动态监测数据。研究区位置如图 1所示(http://xzqh.mca.gov.cn/),其中数字高程模型(digital elevation model,DEM)地形底图来自2000年美国航天飞机雷达地形测绘使命(Shuttle Radar Topography Mission,SRTM)数据中的30 m空间分辨率DEM格网数据(https://lpdaac.usgs.gov/)。
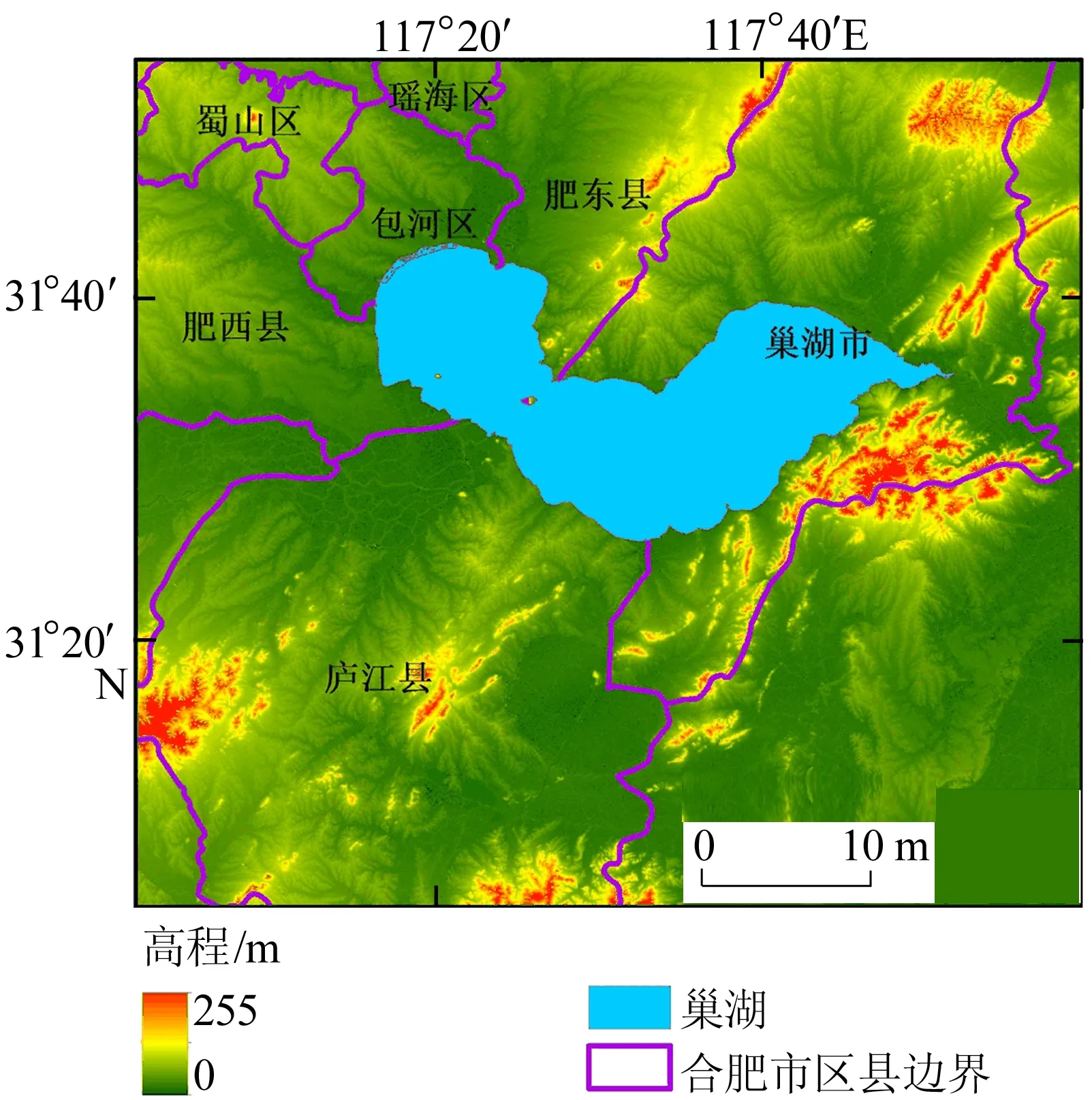
图1 研究区位置
1.2 数据源及预处理
Sentinel-1卫星影像从卫星拍摄到数据分发至数据库仅需3~6 h,对地观测能够穿透云雾,不受天气影响,适合应用于洪涝灾害遥感监测。本文使用干涉宽幅(Interferometric Wide swath,IW)模式获取Sentinel-1A 卫星SAR数据,该模式的宽幅为250 km,空间分辨率为5 m×20 m,具有空间分辨率高和幅宽大的特征。
由于Sentinel-1卫星数据中含有雷达信号相干叠加产生的噪声,需要对原始影像数据进行预处理,达到去除噪声、增强地物后向散射信息的目的。预处理工作使用ESA的SNAP(Sentinel Application Platform,哨兵数据应用平台)软件进行,主要工作流程如图2所示。

图2 Sentinel-1卫星数据预处理流程
2 研究方法
2.1 单阈值法
单阈值法又称为灰度阈值分割法,是依据水体在SAR图像中后向散射系数低、表现为暗区的特性,通过求解图像直方图的极值点来获取水体的分割阈值,形成二值图。Sentinel-1卫星影像VH极化方式的灰度曲线如图3所示。

图3 VH极化影像灰度曲线
在本次实验中设定阈值为-24,将散射值低于-24的部分标记为水体,大于-24部分标记为背景,从而实现水体的提取。
2.2 SDWI阈值法
SDWI水体信息提取方法[12]在归一化植被指数(normalized difference vegetation index,NDVI)和归一化水体指数(normalized difference water index,NDWI)的基础上,根据SAR影像中水体信息的特点,对Sentinel-1双极化数据(VV极化、VH极化)之间水体信息提取的关系进行深入研究,增强水体特征,同时消除土壤和植被的干扰。利用载有C波段的Sentinel-1卫星SAR数据对大尺度的水体信息进行识别,做波段运算后得到新的波段,如图4所示。本次实验设定阈值为0,后向散射系数值大于0的为水体,小于0的为非水体,然后再利用波段运算得到二值图,进而提取水体信息。

图4 SDWI阈值法灰度曲线
2.3 SVM分类法
SVM分类法是在统计学习理论 (statistical learning theory,SLT)基础上优化后的机器学习方法[13],通过学习SVM算法,可自动寻找对分类区分能力强的支持向量,构造出分类器,将各类的间隔最大化,从而获得良好的推广性和较高的分类准确率。
在ENVI(The Environment for Visualizing Images)软件中,对照原始影像和高清的谷歌地球(Google Earth)卫星影像,绘制感兴趣区样本,分为水体和非水体2类,其中70%样本用作训练样本,剩余30%用作验证样本。本文利用SVM监督分类算法对原始影像进行分类,对6幅影像进行水体提取后,通过混淆矩阵来验证此方法提取的精度。
3 结果与分析
3.1 精度评定
本文采用混淆矩阵对3种水体提取方法的成果进行精度分析。混淆矩阵中包含多种分类精度评价指标,包括总体分类精度、Kappa系数、错分误差和漏分误差等。总体精度是指被正确分类为水体或非水体的像元数与总像元数之间的比值;Kappa系数是一致性检验的指标,可用于衡量分类的效果;错分误差是指被错分为水体的像元数占水体真实参考像元数的比例;漏分误差是指被分为其他类型的水体像元数占水体真实参考像元数的比例。
采用单阈值法的精度评定结果见表1所列,总体精度大多高于99%,Kappa系数均高于0.960。

表1 单阈值法精度评定结果
采用SDWI阈值法的精度评定结果见表2所列,总体精度均高于98%,受灾后影像的错分误差较大。
积极推进全域旅游开发是降低分时度假经济成本走出“无钱度假”之困境的必经之路。通过推进全域旅游,开发新的旅游资源,打开供给端,均衡供需关系,避免出现因供需不平衡出现的价格虚高现象,可降低度假的经济成本,提升度假体验感从而多角度的有效刺激当地消费。积极推进全域旅游,要求各地方政府加强合作,通过消费宣传引导联动地区间全域旅游。可以通过各省份之间的联动合作,以“城城联动”为形式,通过开行旅游专列,带动地区间旅游业的发展以此推动各省推行全域旅游,既能为降低分时度假的经济成本也能通过官方宣传为分时度假正名。
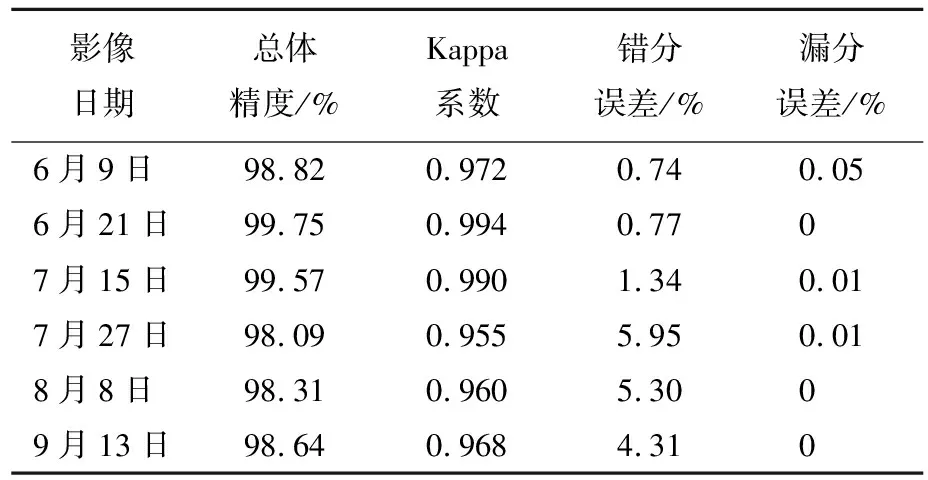
表2 SDWI阈值法精度评定结果
采用SVM分类法的精度评定结果见表3所列,总体精度大多高于99%,部分时间点的影像错分误差稍高,漏分误差也略高于另2种方法。

表3 SVM分类法精度评定结果
采用3种方法提取Sentinel-1卫星影像水体信息的局部效果如图5所示。单阈值法和SDWI阈值法需要确定先验阈值,经过优化和修正,达到提取水体的目的。

图5 3种方法水体信息提取结果局部图
对比分析3种方法提取精度和效果可知:SVM分类法总体精度很高,适合较小范围的高精度提取;对于较大范围的洪涝灾害范围提取,考虑到应满足快速应用的要求,相比于SVM分类法需要人工制作样本,阈值法能更加迅速有效地作出回应,总体精度较高;在阈值法中,单阈值法具有原理简单、提取速度快、计算量小的优点,适用于低噪声、图幅较小SAR图像的水体提取。下面采用单阈值法提取成果对巢湖流域的水面面积进行动态监测。
3.2 洪水淹没面积动态监测与灾后评估
借助Sentinel-1卫星数据,运用单阈值法提取水体,并以RGB波段组合的方式在图像上展现,从而可以快速地提取洪水淹没范围[14]。根据单阈值法生成洪灾前后的水体、陆地二值图,采用RGB波段合成获得彩色图像,R(红光)对应VH极化方式下的原始影像,G(绿光)对应VV极化方式下的原始影像,B(蓝光)对应单阈值法提取得到的水体结果图。巢湖流域2020年6—9月6个时间点的彩色合成图如图6所示。
利用ArcGIS软件计算6个时间点的巢湖水面面积,单阈值法得到的水体面积拟合曲线如图7所示。由图7可知,淹没范围从6月中下旬开始逐渐扩大,在7月27日达到峰值,在8月洪水逐渐退下,9月中旬逐渐恢复正常。

图7 巢湖的湖泊水面面积变化曲线
受灾后巢湖流域的淹没情况如图8所示。图8中:蓝色区域表示洪涝灾害发生前的水域范围;红色区域表示洪涝灾害发生后扩大的淹没范围。根据提取结果统计,洪灾前后水面面积变化高达424.10 km2,提取结果与实际受淹面积相吻合。

图8 洪灾前后巢湖流域的水体变化情况
灾后评估主要包括灾后损失评估和灾害等级判定2个方面。本文利用洪涝灾害未发生时的Sentinel-2、Landsat 8卫星中、高空间分辨率的光学影像对研究区域进行土地利用类型分类,研究受灾区域内各类地物的淹没情况。
参考文献[15],结合研究区实际情况,将研究区分为农用地、建成区、水体和裸地4类。经过精度评定,分类结果的总体精度达到91.49%,Kappa系数为0.880,其中各类地物分类总体精度均高于90%(水体91.61%、农用地95.00%、建成区91.33%、裸地94.00%)。基于较高精度的地物分类图,叠加水体淹没范围进行灾后评估分析,如图9所示。

图9 洪灾灾后水体淹没范围分析图

图10 巢湖闸6-8月降雨量与径流量变化趋势
从整体上看,受灾最严重的区域在巢湖流域西南及正南方向,巢湖的西北和东北方向也受到一定程度的损害;巢湖周围支流附近也遭受淹没。
通过叠加分析,利用ArcGIS软件对淹没区域的各类地物淹没面积进行统计,得到农用地受灾情况最严重,淹没面积高达278.95 km2,其次是裸地,淹没面积为39.73 km2,建成区共淹没18.87 km2。农用地和建成区的淹没受损,极大影响居民的日常生活出行与经济收益。结合2020年6—8月农田庄稼的物候特征进行分析,该时段为农作物生长前期[16],其中夏甘薯、夏玉米、晚稻、夏大豆等属于春播秋收农作物[17],巢湖流域暴雨陆续发生,对农作物造成极大损害。
3.3 洪水特征分析
通过总结巢湖流域洪水的形成过程,能够深入分析巢湖流域洪水形成的原因及特点,对将来的洪水测验研究工作和水域附近居民生命财产的保护都具有重要意义。本文参考文献[18]对淮河流域安徽省多年的暴雨洪水特征分析思路,分析降雨过程和暴雨频率。合肥巢湖闸6—8月的降雨量与径流量数据利用合肥市水务局的监测资料。巢湖闸6—8月降雨量与径流量变化趋势如图 10所示。
巢湖闸在2020年6月中旬到8月末,有4 d降雨量超过50 mm,其中在7月18日降雨量最大,为148 mm,属大暴雨级别。径流过程和降雨过程具有相同的变化趋势,流域径流包括产流阶段和汇流阶段,因此在时间上相对于降雨过程具有一定的滞后性。
在6月中旬至7月7日,降雨量和径流量变化趋势相同,在6月27日降雨量最大(54.5 mm),在6月28日径流量最大(730 m3/s)。在7月8日至7月19日,径流量为0 m3/s,其原因是巢湖闸闸门关闭,过闸流量值为0。在7月20日,巢湖闸开闸泄流,径流量逐渐增大,在7月21日达到最大值,为1 322 m3/s。在7月21日至8月27日,径流量均较大,高于800 m3/s。自8月28日后,由于降雨稀少,径流量逐渐减小。
另外,从巢湖流域6—8月降雨日数和总降雨量分析,结合美国国家环境预报中心(National Centers for Environmental Prediction,NCEP)气候预报系统第2版(Climate Forecast System Version 2,CFSv2)逐6 h数据产品(NCEP Climate Forecast System Version 2 6-Hourly Products),得知巢湖流域2020年6—8月降雨日数高达81 d,降雨日数占6—8月总日数的88.04%,可见降雨的频繁性;在整个6—8月巢湖流域的降雨总量(折合平均降水深)高达1 324.15 mm,降雨强度较大,容易引发洪涝灾害。
4 结 论
本文针对2020年汛期暴雨发生前后巢湖水面面积变化情况,收集6个关键时间点Sentinel-1卫星SAR影像,对研究区淹没面积动态变化进行监测分析。在对比3种水体提取方法的基础上,选取单阈值法对研究区洪水淹没范围进行提取,利用ArcGIS软件对淹没区域的各类地物淹没面积进行统计,淹没面积共计为424.10 km2;淹没土地类型包括农用地、建成区和裸地等,其中影响最严重的是农用地,淹没面积达到278.95 km2,其次为裸地,淹没面积为39.73 km2,建成区共淹没18.87 km2。及时对洪水灾情进行监测评估,可有效提高抗灾救灾工作效率。
本文对于洪灾前后的分析尚有不足之处,仅分析了洪水变化地点和地物变化,未来研究可以做更精确的分析,如结合行政区划边界分析各地区受灾面积、结合人口分布分析受灾人口、结合城镇建筑分布分析受灾的城镇数据等。
