MATLAB GUI在迈克尔孙干涉实验中的应用*
2023-10-10毛胜春何让杰刘奕然
童 童 毛胜春 何让杰 刘奕然
(西安交通大学物理学院大学物理国家级实验教学示范中心 陕西 西安 710049)
迈克尔孙干涉仪是一种利用分振幅法实现双光束干涉的仪器,能够精确测量微小长度或变化,可以用来观察许多干涉现象.它设计巧妙,包含了丰富的物理实验思想,在物理学史上做出了重要贡献,是许多近代干涉仪的基础[1].但是,迈克尔孙干涉仪相关实验调节难度大、测量精度要求高、操作时间长,无法在上课中展示不同情况的干涉现象,不利于学生对实验知识的有效掌握.
MATLAB是一种使用方便的科学计算软件,它在数值分析、科学计算及图形处理等方面具有强大的功能,已被广泛地应用到各个行业领域中.将虚拟仿真技术与实验课程教学相结合,已成为实验教学信息化改革的重要内容[2].利用MATLAB中的图形用户界面(GUI)能够设计出用户交互界面友好、操作方便简单、实验参数灵活设定的仿真实验平台.同时,可利用MATLAB的APP打包功能,将仿真实验平台打包,生成脱离MATLAB环境运行的可执行文件,提升仿真平台使用便利度.
目前利用MATLAB进行的光学仿真研究成果有很多[3-5],针对迈克尔孙干涉仿真大多数局限于对其等倾干涉的模拟,或者将其干涉分为等倾干涉和等厚干涉进行讨论.然而,迈克尔孙干涉仪所产生的干涉条纹与两反射面的相对位置有关,即同时受到反射面之间的距离及倾斜角度的影响.本文对迈克尔孙干涉的原理进行了系统的讨论,综合考虑倾角、距离等因素对干涉条纹的影响,利用MATLAB软件搭建GUI仿真操作平台,模拟仿真迈克尔孙干涉仪的几种干涉现象[6-9],模拟仿真结果与实验观测图样一致.
1 基本实验原理
迈克尔孙干涉仪原理如图1所示,由两平面反射镜M1和M2,光源S和观察点E(或接收屏)组成.M1、M2相互垂直,M2是固定的,M1被安装在一个轨道上,可沿轨道做精密移动,其精度可以达到10-4mm.G1、G2是两块材料相同,薄厚均匀相等的平行玻璃片.G1的背面镀有半反射膜,称为分光板.G2称为补偿板,使两个光束3次通过玻璃介质.G1、G2与平面镜M1、M2成45°角.

图1 迈克尔孙干涉仪光路图
为了使入射光线具有各种倾角以获得丰富的干涉图样,光源应该是扩展的,插入毛玻璃或凸透镜以扩大视场.自面光源S发出的一束光射到分光板G1的半透膜后,被分解为振幅相等的反射光和透射光,这两束光分别经M1和M2反射后又原路返回,在分光板后表面分别被透射和反射,在E处相遇成为相干光,可产生干涉现象.
当观察者从E处向G1看去时,除了直接看到M1外,还能看到M2在G1中的虚像M′2,这里M′2是右方M2镜面对G1镀银面反射而生成的像,即M′2与M2互为镜像对称,故左右往返于M2的光程等于上下往返于M′2的光程.借助等效空气层概念,迈克尔孙干涉仪中接收的干涉场等效于M1镜面与M′2镜面形成的空气层所产生的干涉场.
1.1 等倾干涉 M1与M′2严格平行(α=0)
当M1与M′2严格平行,即M1与M2严格垂直时,所得干涉为等倾干涉,其光路图如图2所示.

图2 等倾干涉光路图
干涉图形中的每条圆环状干涉条纹对应的入射光线都有相同的入射角.根据光路图中的几何关系,可以得到光束1与光束2之间的光程差为
Δ1=AC+CB-AE
(1)
因为
所以
Δ1=2dcosi
(2)
相位差为
(3)
1.2 等厚干涉 M1与M′2相交(d=0,α≠0)
等厚干涉光路图如图3所示,根据等厚干涉的定义分析,只有当入射角i近似等于零,并且d很小(d=0或在波长λ线度内)才能够出现严格意义上的呈直线的等厚干涉条纹.设楔形空气层的夹角为α,视场上一点(x,y),则该点处的光程差为

图3 等厚干涉光路图
Δ2=2h=xtanα≈2xα
(4)
相位差为
(5)
1.3 同时存在等倾与等厚干涉(d≠0, α≠0)
实际实验中,很难利用迈克尔孙干涉仪调节出严格的等厚干涉,是因为反射镜M1与M′2之间没有严格平行,即M1与M′2有一定角度及厚度时,M1与M′2之间形成楔形空气薄层.此时等厚干涉条纹不再严格平行,而是随着d的变化向两侧弯曲.因为圆环状干涉条纹上的各个点对应的M1与M′2之间形成的楔形空气薄层厚度不再相同,不是严格意义上的等厚干涉,需要考虑等倾干涉的共同作用.我们将此种情况下的干涉图样规律总结如下.
此时的i、d很小,其光程差可以近似地分为等倾干涉和等厚干涉两部分之和,其光程差为
Δ3=2dcosi+2xα
(6)
其相位差为
(7)
设G1分光板材料玻璃的折射率是n1,半透膜的折射率是n2,且n1>n2时,则光束1仅在M1表面反射时存在半波损失,光束2在M2和G1背面存在两个半波损失,因此光束1和光束2相位差需加π.考虑半波损失后,产生干涉条纹的明条纹条件为
产生干涉条纹的暗条纹条件为
其中k=0,1,2,….
两束光在相干条件下,满足双光束干涉强度公式
(8)
这里I1=I2=I,则式(8)化简为
I(P)=2I[1+cosδ(P)]
(9)
式(6)和式(9)包含了迈克尔孙干涉仪出现的各种干涉图样.
2 MATLAB GUI的仿真平台的建立
根据前面的理论分析,本文以波长、M1与M2的距离以及角度为自变量函数,利用MATLAB函数结合式(6)和式(9)计算干涉条纹的分布.同时本文创建了GUI界面如图4所示.

图4 MATLAB GUI的仿真平台与运行结果(等倾干涉时)
以等倾干涉为例,左上角给出了实验名称、实验光路示意图;右侧是3个滑动条及3个数字文本框,能够改变或输入参数以对M1与M′2的倾角α、光波的波长λ和M1与M′2的距离d进行取值;单击界面下方的运行对话框,通过观察视场(界面左下方)能够直观地看到迈克尔孙干涉条纹随参数变化的空间分布动态变化.
3 仿真实验与实际实验结果对比
3.1 实验结果
当迈克尔孙干涉仪中的反射镜M1与M2的镜像M′2的相对位置不同时,实验室的观测结果如图5所示.其中,图5(a)、(b)、(c)、(d)、(e)是M1、M2严格平行的情况,属于等倾干涉;图5(h)是严格的等厚干涉;图5(g)、(i)的干涉条纹既包含了等倾干涉也包含了等厚干涉;图5(f)、(j)是M1、M2两平面镜间距太大时看不到干涉条纹.
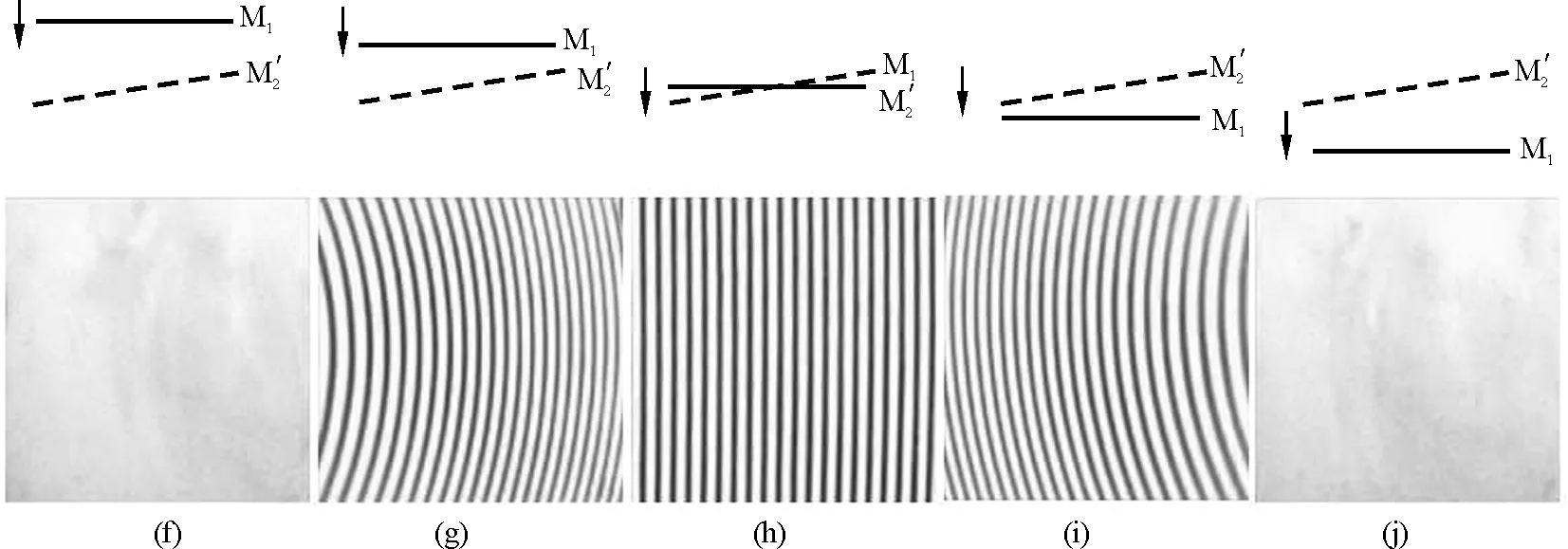
图5 迈克尔孙干涉仪中观察到的几种典型条纹
可以看出,当M1与M′2严格平行时,观察到的是一组明暗相间的同心环状等倾干涉条纹,如图5(a)~(e)所示.当M1与M′2相距较远时,条纹比较密,如图5(a)和(e)所示;将M1与M′2距离变小时,各圆条纹不断陷入中心,条纹越来越稀疏,如图5(b)和(d)所示;直到M1和M′2重合,干涉条纹消失,如图5(c)所示.当M1与M′2有微小夹角时,观察到的是“等厚”干涉条纹,如图5(f)~(j)所示.当M1与M′2的间距大于光源的相干长度时,不发生干涉条纹,如图5(f)和(j)所示;当M1逐渐靠近M′2时,出现干涉条纹,朝背离M1与M′2交线的方向弯曲,如图5(g)和(i)所示;当M1与M′2距离很小,相交时,条纹变直,如图5(h)所示,观察到的是等厚干涉条纹.

3.2 仿真实验结果
我们搭建的MATLAB GUI实验仿真平台,能够模拟出迈克尔孙干涉实验中的多种干涉图样.当M1与M′2严格平行时,即倾角为零时,仿真结果是等倾干涉图样,结果如图4所示.当点击增大或减小按钮改变M1与M′2之间的距离,能看到环状的等倾条纹先吞后吐或者先吐后吞,可以观测到与实验结果图5(a)~(e)完全相同的干涉图样.
当M1与M′2不平行时,即倾角不为零时,仿真结果是“等厚干涉”时,结果如图6和图7所示.当点击增大或减小按钮改变M1与M′2之间的距离,能看到等厚条纹由向左弯曲的线条逐渐变为平行直线,再逐渐变为向右弯曲,或是由向右弯曲的线条逐渐变为平行直线,再逐渐变为向左弯曲,即与实验结果图5(g)~(j)完全相同的干涉图样.图6是M1与M′2相交时的仿真结果,即等厚干涉图样.图7是当M1与M′2不平行且有一定距离,即同时存在等倾干涉和等厚干涉时的仿真结果.

图6 等厚干涉仿真结果图
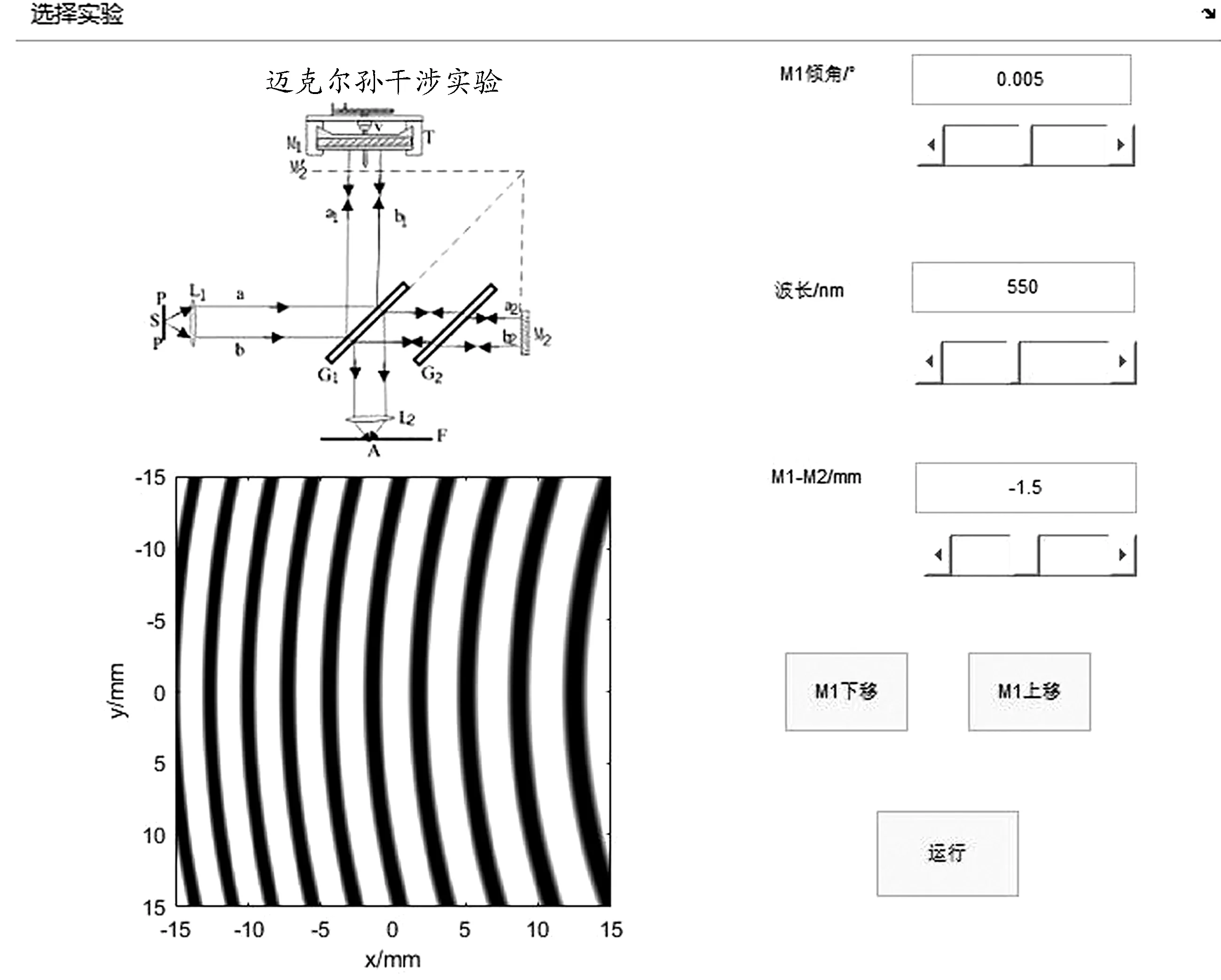
图7 同时存在两种干涉的仿真结果图
我们可以看出仿真结果与实际结果非常地吻合,并且使用迈克尔孙干涉实验仿真界面中的两个移动反射镜M1的按钮,能够观察图样动态变化情况.这样有助于学生直观地理解物理概念,更好地理解实验图像,也能够培养学生对实验研究的兴趣.
4 结论
本文对迈克尔孙干涉实验中的等倾干涉、等厚干涉以及两种干涉同时存在的干涉等3种情况的原理分析,给出了两种干涉都存在时的理论分析,并基于此设计了MATLAB GUI仿真实验平台,能够模拟上述3种干涉图样,与实际实验结果相符合.仿真实验平台模拟的各种干涉过程,使学生深刻体验到不同条件下的干涉图样,图样细致逼真,使整个物理过程变得直观形象,能够解决实验设备调节困难、实验现象难以观测等问题,为实验的理论分析和实验教学提供了有效辅助手段.而将信息化技术与物理实验教学相结合,提供多元化实验教学资源,进而提升实验教学效果已成为高校物理实验教学创新发展的必然趋势.
