山区公路弯道会车过程驾驶人心生理及行为耦合特性分析
2023-10-10胡汇
胡 汇
(重庆交通大学 交通运输学院, 重庆 400064)
驾驶负荷与行车安全密切相关,人因是导致交通事故发生的本质原因[1]。我国山区道路线性及交通状况复杂,驾驶人行车过程需不断接收道路信息,做出感知判断及执行操作,若在驾驶过程中出现任何感知偏差、决策失误或操作错误都会导致道路事故风险增加。与山区公路普通路段相比,山区公路弯道操作更加复杂、行车风险更高,尤其是弯道会车过程中,驾驶人负荷较大时,极易发生影响行车安全的风险事件。
为此,国内外学者针对驾驶负荷开展相关研究,Faure等[2]通过模拟器采集驾驶人眼动数据,发现驾驶员眨眼频率可作为视觉负荷表征指标,当驾驶难度增加时,表征效果会降低。之后的研究表明平均注视持续时间变化以及瞳孔面积或变化率均可间接反映驾驶人驾驶负荷变化[3-4]。有学者使用平均注视时间和瞳孔面积对驾驶人在不同郁闭式空间下的视觉负荷进行量化评价[5-7]。白婧荣等[8]利用驾驶员瞳孔直径及专注度等数据对毗邻互通立交特长隧道驾驶负荷进行研究。心率相关指标(心率值或增长率等) 也可有效描述驾驶人心理状态和精神压力变化[9-11]。徐进等[12]、胡立伟等[13]、张康[14]对山区公路纵断面参数、加减速及心率增长率的关系开展了研究。
此外,部分学者围绕道路线形对驾驶负荷的影响开展分析。张熙衍[15]通过分析驾驶人视觉负荷动态演变规律,对山区公路不同平面线形进行安全评价。陈志贵等[16]研究了驾驶人纵向加减速行为受不同组合线形变量的具体影响。徐进等[17]、乔建刚等[18]通过开展实车试验探究驾驶人会车过程中行车速度与心率变化之间的联系。王海晓等[19]基于注视行为特性进行了驾驶人分心负荷评估。
可见,前述研究多采用单一指标对驾驶负荷进行分析评价,较少结合驾驶人信息感知-心生理变化-驾驶行为变化全过程进行具体分析,且山区弯道会车场景下的驾驶人心生理与行为耦合特性分析研究相对较少,目前研究对于弯道会车规律探究的还不够完善,本文补充了弯道会车规律研究的相关理论。
本文通过开展实车试验,分析不同经验驾驶人在山区公路会车场景下的心生理变化、速度控制特性及影响[20],量化驾驶人会车场景驾驶负荷,通过秩和比法综合评价会车各阶段行车风险等级。
1 试验设计
1.1 试验路段
选取贵州市境内5条道路作为备选道路,实地调研对比各路段交通量、交通组成、环境特征后,最终选择贵阳X129道路开阳县华兴油脂厂-乌当区丽华木工厂段开展试验,路段总长35 km,设计速度为30 km/h,路面宽度为8 m。
1.2 试验驾驶人
试验共招募21名被试驾驶人,且均具有3年以上驾驶经验,裸眼视力优良,无重特大交通事故经历。综合驾龄、驾驶里程及对试验路段熟悉程度,将驾驶人分为熟练和非熟练两类。熟练驾驶人平均驾龄13年,山区公路驾驶经验丰富;非熟练驾驶人平均驾龄6.5年,常行驶路段为城市道路,山区公路驾驶经验较少。驾驶人基础信息见表1。
1.3 试验设备
如图1所示,试验车选用北京现代四座小轿车,并搭载航姿参考系统(内置陀螺仪和加速度器,采集速度和加速度,频率为10 Hz)、PhysioLab生理多导仪(记录被试心电信号)、Smart eye型佩戴式眼动仪(实时记录驾驶人眼动指标及变化)等设备。

图1 试验车辆及设备
1.4 数据筛选
经统计,共得到197段弯道会车数据。为减少因弯道差异对分析结果的影响,进一步筛选半径为40 m左右、坡度绝对值小于3%的弯道会车数据,共得到61段,其中熟练驾驶人33段,非熟练驾驶人28段;同样地,筛选得到半径为40 m左右、纵坡坡度绝对值小于3%的弯道无会车数据,共52段,其中熟练驾驶人28段,非熟练驾驶人24段。
2 弯道会车驾驶人心生理行为耦合特性
对弯道会车场景下熟练及非熟练驾驶人的视觉特性、心率及速度变化特点进行分析,综合评价会车过程不同阶段驾驶人的驾驶负荷变化规律。
2.1 注视持续时间
通过分析眼动数据,得到熟练及非熟练驾驶人在山区弯道左转及右转过程中的注视持续时间,以100 ms为分隔区间,分别对两类驾驶人弯道左转/右转过程中会车/不会车时的注视持续时间进行统计分析,结果如图2所示。
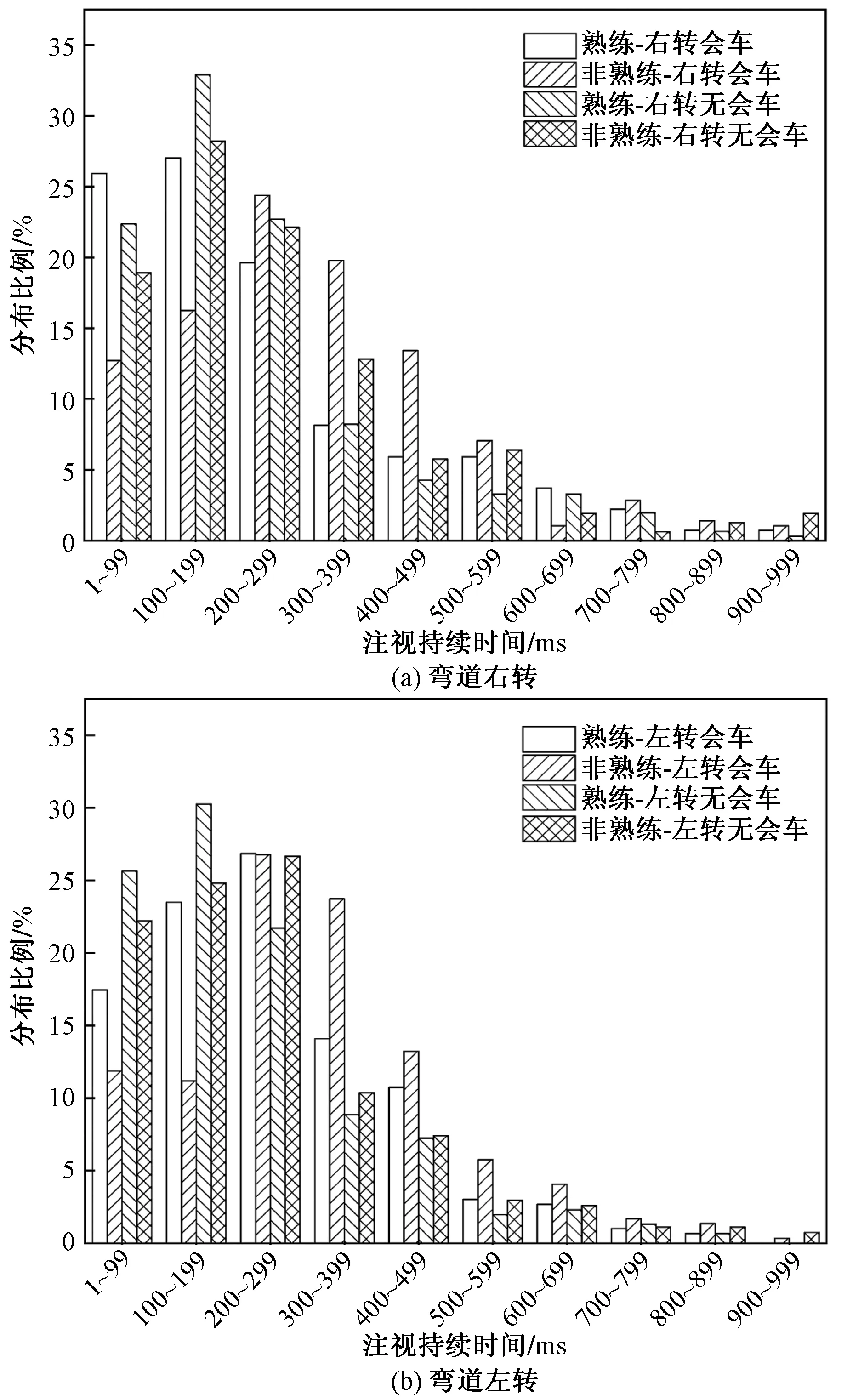
图2 两类驾驶人弯道注视时间分布
由图2可知,两类驾驶人弯道左转/右转会车单次注视持续时间均呈现偏态分布。弯道右转无会车时,两类驾驶人注视持续时间集中在100~199 ms区间;右转会车时,熟练和非熟练驾驶人注视持续时间分别集中在100~199 ms和200~299 ms,且500 ms以上注视时间占比增加。
弯道左转无会车时,熟练及非熟练驾驶人注视持续时间集中分布于100~199 ms及200~299 ms,会车时两类驾驶人注视持续时间主要集中在200~299 ms,300~500 ms占比增长幅度较大。上述结果表明弯道左转或右转会车时,驾驶人注视持续时间均有小幅上升,非熟练驾驶人注视持续时间长于熟练驾驶人,获取道路信息所需时间更长。
熟练驾驶人弯道右转会车及无会车时的平均注视时间分别为250.9、231.7 ms,非熟练驾驶人弯道右转会车及无会车时的平均注视时间分别为306.4、251.6 ms。熟练驾驶人弯道左转会车及无会车时的平均注视时间分别为262.1、226.4 ms,非熟练驾驶人弯道左转会车及无会车时的平均注视时间分别为312.6、261.1 ms。可知,两类驾驶人在会车时的平均注视持续时间均高于无会车情况,会车时非熟练驾驶人平均注视时间大于熟练驾驶人。
2.2 注视分布特性
通过K均值方法对弯道左转无会车及会车时的注视点坐标进行聚类分析,得到7处兴趣区域(图3)。弯道左转情形下的注视点分布情况如图4所示。
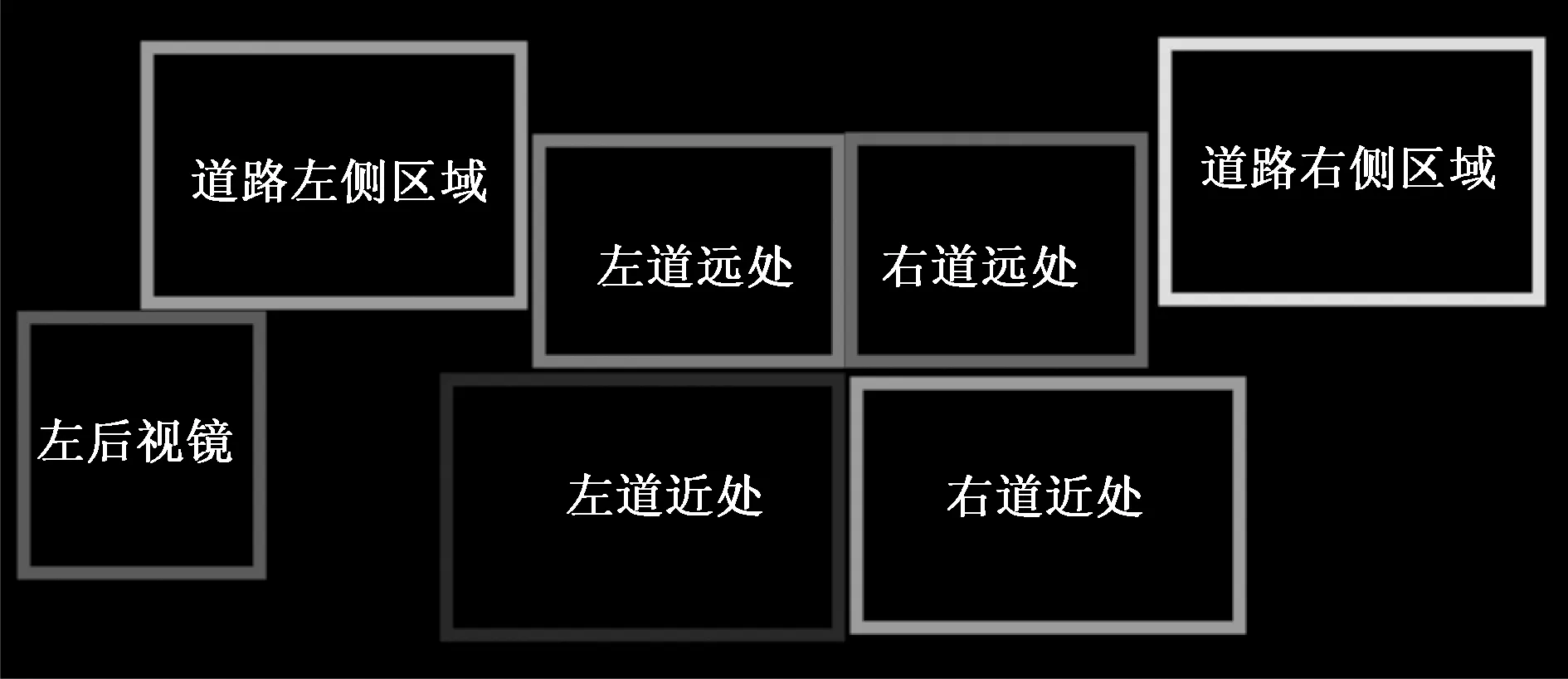
图3 弯道左转情形下动态聚类兴趣区域

图4 两类驾驶人弯道左转情形下注视点分布
由图4可知,弯道左转会车时,熟练驾驶人注意力由分散转为向车道集中,非熟练驾驶人注视点在右车道近处更为密集,对道路远处和路侧注视点分布少于熟练驾驶人。
类似地,对弯道右转无会车及会车时的注视点坐标进行聚类分析,由于未统计到左右后视镜注视点,故选定6类注视兴趣区域(图5)。弯道右转情形下的注视点分布如图6所示。

图5 弯道右转情形下动态聚类兴趣区域

图6 两类驾驶人弯道右转情形下注视点分布
由图6可知,弯道右转会车时,驾驶人注意力集中于道路近处,对车道远处、道路外侧关注度均低于无会车情形,熟练驾驶人对车道以外及对向车辆的关注度均高于非熟练驾驶人。
2.3 瞳孔直径变化规律
基于眼动数据对驾驶人弯道行驶过程中的瞳孔直径变化情况进行分析,统计结果如图7所示。可知,两类驾驶人瞳孔直径均值位于2.7~3.1 mm,驾驶人在弯道行驶过程瞳孔直径均呈先上升后下降的趋势;无论是否会车,非熟练驾驶人平均瞳孔直径均高于熟练驾驶人。

图7 两类驾驶人弯道平均瞳孔直径变化
2.4 心率变化规律
基于生理多导仪采集数据对驾驶人弯道行驶过程中的心率均值进行分析,结果如图8所示。可知,无论是否会车,两类驾驶人心率均值均呈先上升后下降的趋势,非熟练驾驶人心率均值整体高于熟练驾驶人,会车时驾驶人心率均值整体高于无会车情形,非熟练驾驶人会车时心率均值增长幅度高于熟练驾驶人。
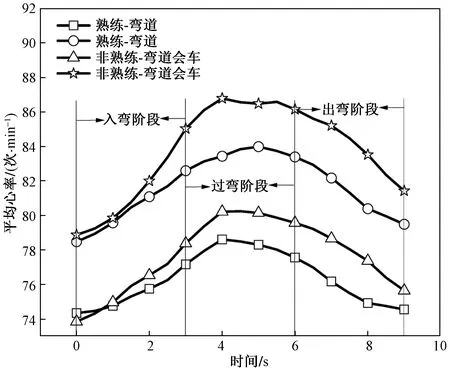
图8 两类驾驶人弯道平均心率变化
2.5 速度控制特性
通过分析驾驶人弯道行驶过程中的速度数据(图9)可知,两类驾驶人平均速度呈先下降后上升的趋势,无论是否会车,熟练驾驶人平均速度均高于非熟练驾驶人。
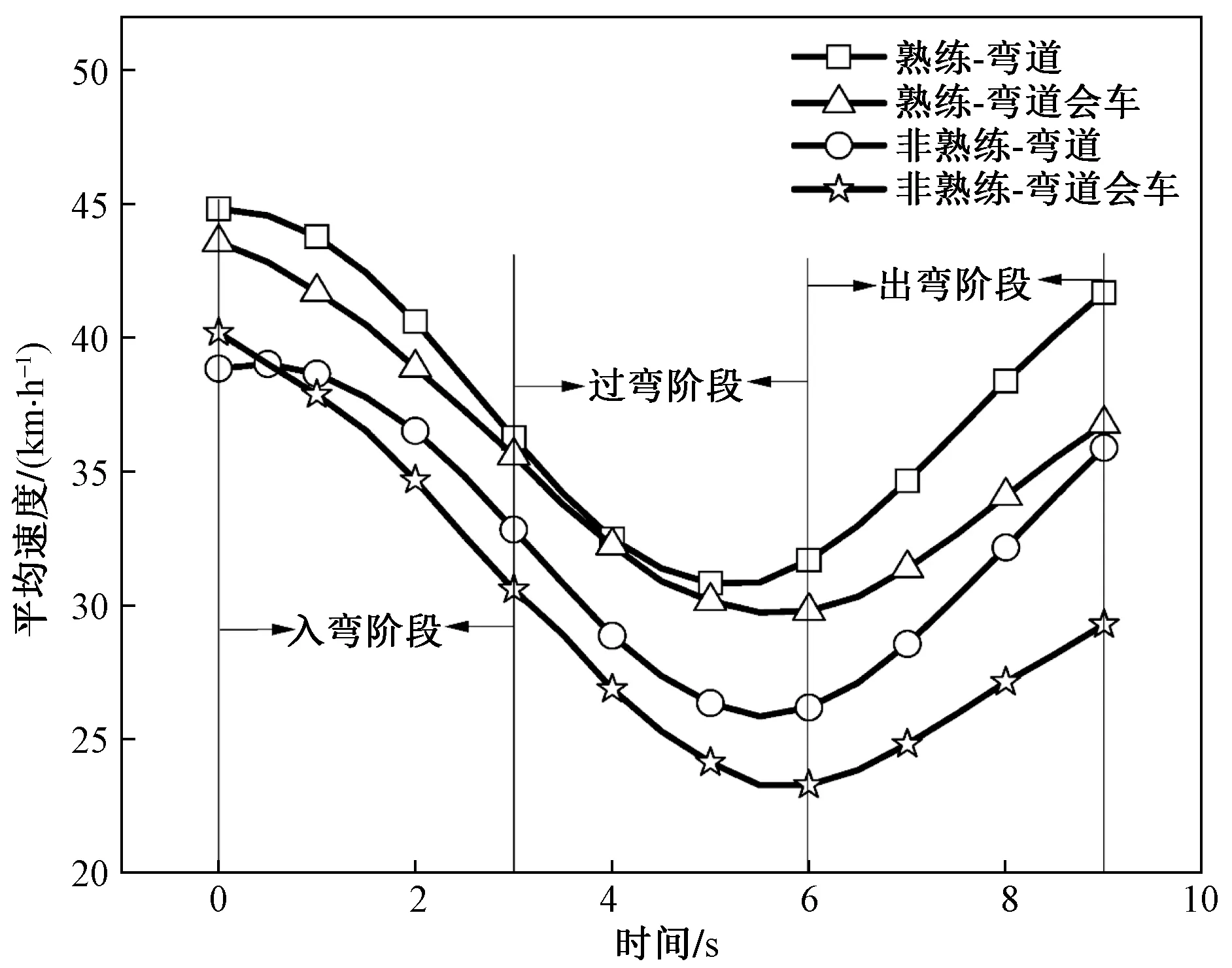
图9 两类驾驶人弯道平均速度变化
3 驾驶负荷评价
通过秩和比法评价弯道会车时的驾驶负荷,并对各阶段负荷大小进行排序,以表征会车各阶段的行车风险性。
3.1 评价指标归一化
通过构建标准化决策矩阵V=(bij)m×n,瞳孔面积变化率、心率增长率和注视持续时间作为单一指标均可评价驾驶人行车负荷[21-23],采用式(1)将指标数据进行归一化处理,将数据映射至[0,1],结果见表2。

表2 评价指标归一化
(1)
式中:xjmax、xjmin分别为评价指标所有样本的最大值和最小值。
3.2 评价指标权重确定
因不同评估指标的影响程度不同,故根据信息熵大小,衡量每个评估指标的变化程度,以确定指标权重。对于具有n个评估阶段和m个评价指标的多目标综合评价问题,其评价指标熵Hj为
(2)
(3)
各评价指标熵权W计算公式为
(4)
根据式(2)~式(4)可知各指标信息熵、信息效用值及熵权,计算得到瞳孔面积变化率、心率增长率和注视持续时间的权重系数分别为0.558 3、0.343 1和0.098 3。
3.3 秩值计算与排序
某矩阵有n行(n个评价对象)m列(m个评价指标),其秩值计算如式(5)所示。代入前述归一化数据计算得到各评价指标的RSR(秩和比)值,计算结果见表3。
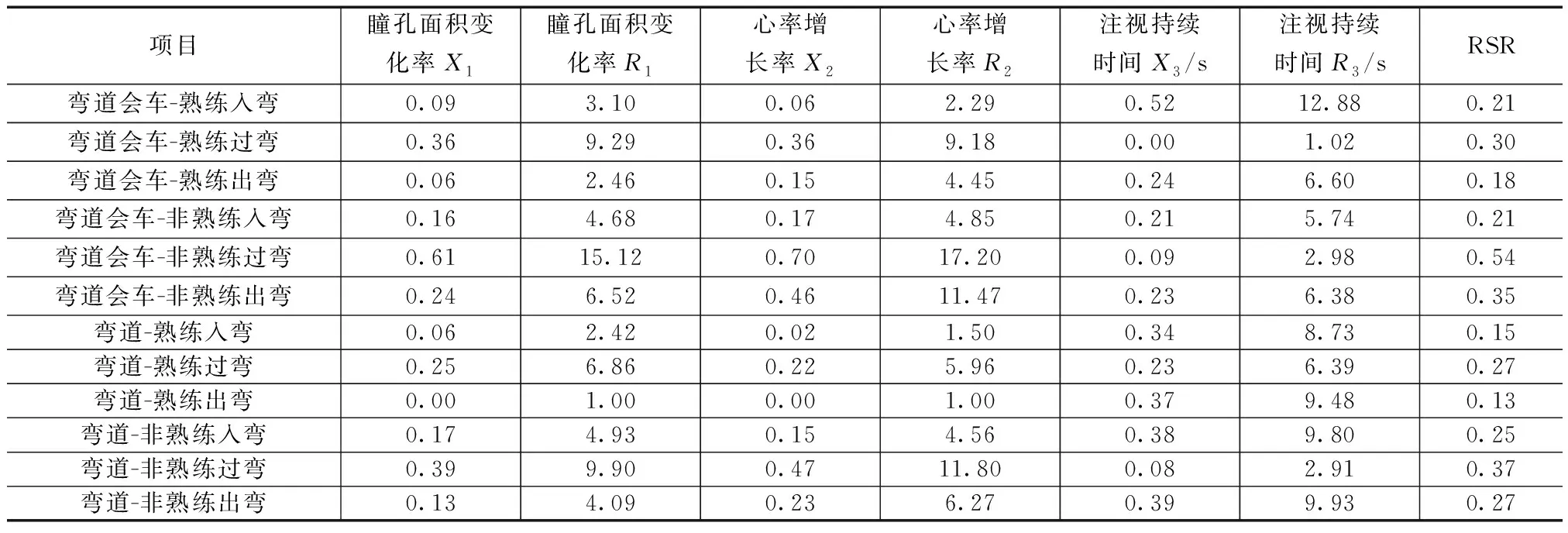
表3 RSR计算结果
(5)
式中:i=1,2,…,n.;j=1,2,…,m;Rij为第i行第j列元素的秩。
查询“百分数与概率单位对照表”,求得各RSR值对应概率单位Probit值。进一步对秩和比法得到的驾驶负荷评价值进行K均值聚类,通过K均值聚类方法中的肘部法则和轮廓系数法,寻找损失值下降平稳的拐点和轮廓系数的最大值,两种方式的结果均显示当聚类个数(K)为5时,聚类效果最优,故将其分为高、较高、正常、较低、低5级,见表4。
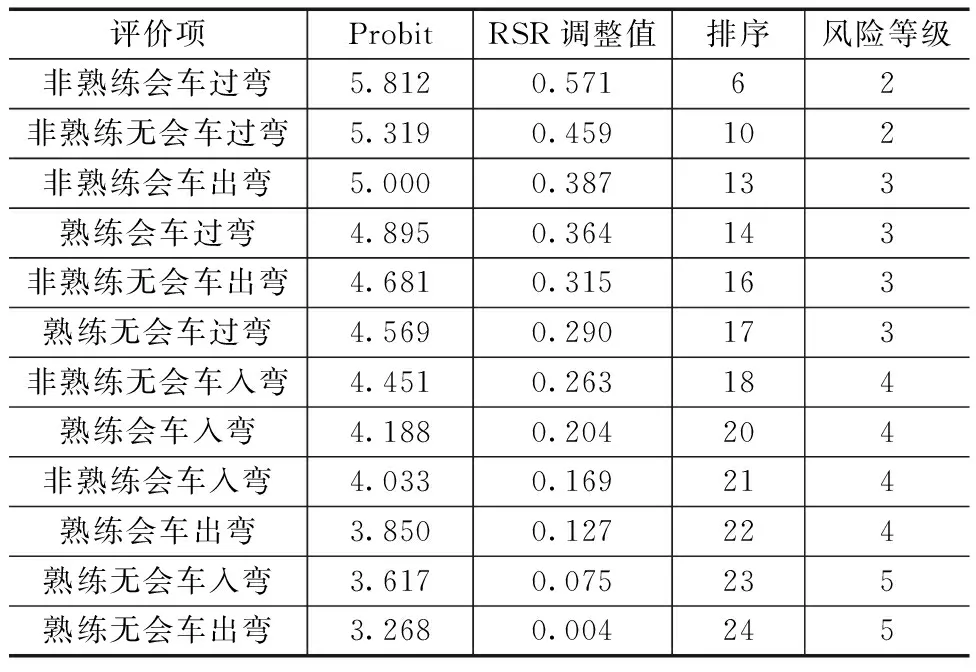
表4 驾驶负荷评价排序结果
由表4可知,无论是否会车,非熟练驾驶人过弯阶段的驾驶负荷均较高,风险等级为2级。熟练驾驶人过弯阶段的驾驶负荷处于中等水平。由于弯道入弯及出弯驾驶难度较低,因此,驾驶人在上述行车区间驾驶负荷相对较低。
4 结论
1)不同经验驾驶人弯道会车过程驾驶负荷均表现为过弯阶段>出弯阶段>入弯阶段,且非熟练驾驶人无论会车与否,过弯阶段的风险等级均较高。弯道无会车时,两类驾驶人对道路远处的注意力占比较高;弯道会车时,两类驾驶人注意力向车道近处集中,且熟练驾驶人关注对向来车的比例更高。
2)非熟练驾驶人在会车/无会车两种情形下的平均视觉负荷、心理负荷均高于熟练驾驶人。弯道会车时,两类驾驶人的平均视觉负荷、心理负荷均高于无会车情形。
3)不同经验驾驶人会车过弯的平均速度均低于无会车过弯情形,且无论弯道会车与否,熟练驾驶人的过弯平均速度均高于非熟练驾驶人。
本研究剔除了驾驶人在雨雾天气下的弯道会车样本,天气对驾驶人会车影响较大,未来可进一步扩展样本,对不同天气下的驾驶人会车过程心生理及行为特性开展研究。除眼动和心率特性外,今后研究可考虑引入脑电、皮电等数据指标。
