基于微动探测技术实现铁路机制砂厂三维可视化展示
2023-10-10谭冠华汤建平周仕隆
汪 峥, 范 琪, 谭冠华, 汤建平, 周仕隆, 王 肖
(1.中铁二院工程集团有限责任公司, 成都 610036;2.川藏铁路技术创新中心有限公司, 成都 610256)
铁路机制砂厂建设地附近一般地质条件复杂,易发生滑坡、泥石流等地质灾害。因此,在修建砂厂之前,需要对场地进行地质探测,对可能影响工程施工的问题进行提前处理,保证施工安全。
传统的地质探测手段有钻探法、高密度电法、重力法等。钻探法需要较为宽阔的场地架设钻机等装置,在建设前期,沿线无道路或仅有狭窄的道路条件,难以运输和架设钻探设备,施工难度大,并且成本高、施工效率低;高密度电法需要采集电阻率数据,但电阻率容易受到裂隙水等因素的影响,使电阻数据失真,导致探测精度降低;重力法易受到地形起伏的影响,使得探测精度下降。因此亟须一种无损的、适应性强、精度高的探测技术。
作为地层分层和隐伏构造探测的物探新方法,微动探测技术无需人工震源,具有较强的抗干扰性、高探测精度和灵活的施工方式。在地层划分[1]、地质勘查[2]、地质构造探测[3]等多个领域已取得良好的应用成果。微动探测技术在环境条件要求较低的同时,展现出良好的探测效果。然而,在复杂的山地环境中,这一技术的应用尚属罕见。本文通过具体案例分析,将微动探测技术引入铁路机制砂厂建设工程项目,对测区进行地质探测,全面评估场地条件,并排查地质风险,有效解决了项目中的难题。同时,将微动探测成果整合到三维数据平台,以直观且准确的方式展示测区的地质情况。
1 微动探测技术简介
地球表面即便没有发生明显可以感知的地震,也始终存在着各种频率的微弱振动,这类振动称为微动。一般来说,微动的振幅都很小,位移幅值通常介于10-4~10-2mm。微动信号源于自然和人类活动两类因素:自然因素包括地震、海浪、潮汐、风、降雨等;人类活动因素包括工厂生产、交通及日常活动等。微动信号中同时包含有体波和面波成分,面波成分在微动信号中占据绝对主导地位,从本质上讲微动探测是一种基于面波特性来研究浅地表地层结构的弹性波物探方法。
根据微动采集数据方式的不同,可以将微动分为基于台阵的方法及基于单点的方法。
1.1 微动台阵方法
SPAC(spatial autocorrelation,空间自相关)法最早由Aki于1957年从理论上推导,目前在工程勘察[4]、地质灾害勘察[5]等领域应用广泛。SPAC法要求采用圆形等规则台阵[6],具体形式为圆心布设1个测点,圆周布设3个及以上的测点。SPAC法处理台阵微动数据获取横波速度结构主要分三个步骤:①计算台阵中台站对的空间自相关函数,并经方位平均后得到空间自相关系数;②利用第一类零阶贝塞尔函数拟合得到瑞雷波的相速度(频散曲线);③反演频散曲线得到地下横波速度结构。
F-K法(频率-波数法)最早由Capon于1969年提出,目前也被用于工程勘察等领域[7]。F-K法的台阵布设比SPAC法自由,一般不受台阵布设形状的限制,但需要的测点个数多,一般在6个或6个以上。该方法基于频率、波数域功率谱密度函数的计算,将台阵观测信号从时间-空间域转换到频率-波数域,从而获取入射波场能量在不同慢度和方位角的分布。不同频率的面波在二维波数空间上会出现相应的峰值;确定该峰值的位置即可得到波数,从而能够计算出不同频率面波的相速度,获取面波的频散曲线,通过反演得到地下横波速度结构。
1.2 微动单点方法
HVSR(horizontal-to-vertical spectral ratio,水平-垂直谱比)法最早由Nogoshi和Igarashi于1971年提出,并由Nakamura于1989推广应用,目前已广泛应用于工程领域,如场地类型评价、地震放大效应评估等方面[8-9]。HVSR法采用单台三分量地震仪进行数据采集,没有台阵布设的限制,可以因地制宜地进行探测点位的布设。HVSR法计算地表微动记录的水平分量频谱与垂直分量频谱的比值,典型的HVSR曲线具有一个明显的峰值频率F0,通过分析曲线的峰值频率F0特征并反演得到地下横波速度结构。
2 项目应用
在某铁路隧道洞口建设的机制砂厂工程项目中开展微动探测技术的应用,旨在识别和评估潜在的地质风险,从而确保工程的安全和高效进行。
2.1 技术对比
拟建厂区附近高山林立,属于典型的高山峡谷地貌。地面多为滚石、杂土,植被茂盛,地表不平整且地形起伏大,作业面局限。选取约10 m×10 m的区域作为试验场地,对SPAC法、F-K法和HVSR法进行场地适应性研究及方法间的比选,(图1)。

图1 试验场地选择
2.1.1 SPAC法
SPAC法对台阵形式要求严格,但由于地表条件限制,难以选取规则的作业面,在人工对部分地面进行平整后,本次采用圆内接正五边形的台阵形式,由位于圆心的1台仪器及圆周的5台仪器组成,台阵半径设置为2 m。台阵布设如图2(a)所示。

图2 SPAC法
在完成台阵布设后,进行时长为15 min的微动数据采集。利用SPAC法进行频散曲线的提取,由图2(b)可知,在2~50 Hz的频率范围内,频散曲线范围发散,无法提取有效的频散曲线。
2.1.2 F-K法
F-K法对台阵形式要求相对自由,但对台阵内部各测点的一致性要求很高,选区地面为滚石、碎石及杂土等多种类型。在进行点位布设时,尽量将地面条件控制为相对均一的碎石/杂土类型,台阵内部节点最小间距为1 m,最大间距为6 m,台阵布设如图3(a)所示。

图3 F-K法
在完成台阵布设后,进行时长为15 min的微动数据采集。虽然尽量控制了地面条件的均一性,但由于地表类型变化不规律,F-K法采集的原始数据还是存在一定程度的差异,如图3(b)所示。
利用F-K法进行频散曲线的提取,由图4可知,在2~50 Hz的频率范围内,频散曲线范围发散,无法提取有效的频散曲线。

图4 F-K方法提取频散曲线
2.1.3 HVSR法
HVSR法仅需单台三分量微动记录仪,仪器之间相互独立,没有台阵形式及仪器间一致性的要求,可以覆盖不同的地面条件,如滚石、碎石、杂土等。在试验区域布设微动点位,进行微动数据采集,如图5(a)所示。
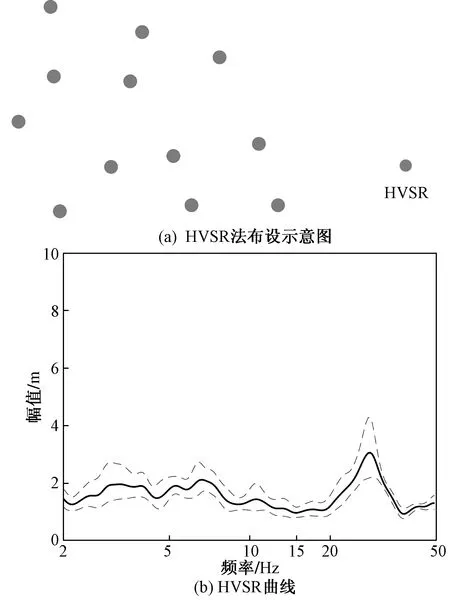
图5 HVSR方法
在完成点位后,进行时长为15 min的微动数据采集。利用HVSR法计算HVSR曲线,由图5(b)可知,HVSR曲线具有清晰的峰值频率,数据真实可靠。
综上所述,SPAC法对台阵形式要求严格,测区地面不平整,地表起伏大,大部分区域需要进行人工平整,成本巨大且难以实施,因此难以按照圆形台阵形式进行点位布设,且通过SPAC法无法提取得到有效的频散曲线;F-K法台阵形式相对灵活,但由于地表类型多种多样,且分布无规律,难以保证台阵节点间的一致性,因此无法提取得到有效的频散曲线;HVSR法节点之间相互独立,对场地条件要求低,可以最大限度地利用已有场地环境进行点位布设,施工灵活、高效,计算得到的HVSR曲线可靠、有效,满足探测要求。因此,选取HVSR法进行测区的场地条件评估工作。
2.2 场地条件评估
2.2.1 微动数据采集
砂厂区域长度约为200 m,宽度约为120 m,本次微动探测采用一体化、高精度、三分量宽频带数字地震仪,在砂厂区域布设微动点位,用于微动数据的采集。
本次微动探测共计完成275个微动点位的工作,如表1所示。

表1 微动探测完成工作量
2.2.2 HVSR曲线提取
完成微动数据采集后,进行HVSR曲线的提取。计算得到HVSR曲线后,采用欧洲SESAME项目提出的准则检验HVSR曲线的可靠性,本次数据的95%均符合该标准,数据可靠度高,一个清晰、可靠的HVSR曲线如图6所示。

图6 HVSR曲线
2.2.3 HVSR曲线反演
邻域算法是一种基于全局搜索的反演方法,主要包括两个步骤:首先应用维诺图的几何分割方法在参数空间搜索符合条件的模型,然后对模型进行贝叶斯统计分析,最终确定最优模型。采用邻域算法对计算得到的HVSR曲线进行反演,主要参数空间包括地层纵波速度、地层横波速度、泊松比及密度。通过反演地层横波速度结构,结合《建筑抗震设计规范》等标准,将测区的场地类型分为三类。
第Ⅰ类为基岩型。这种类型地层地面为出露基岩,地层结构稳定,测点占总测点数的60%左右,场地施工风险较低或无施工风险,如图7(a)所示。
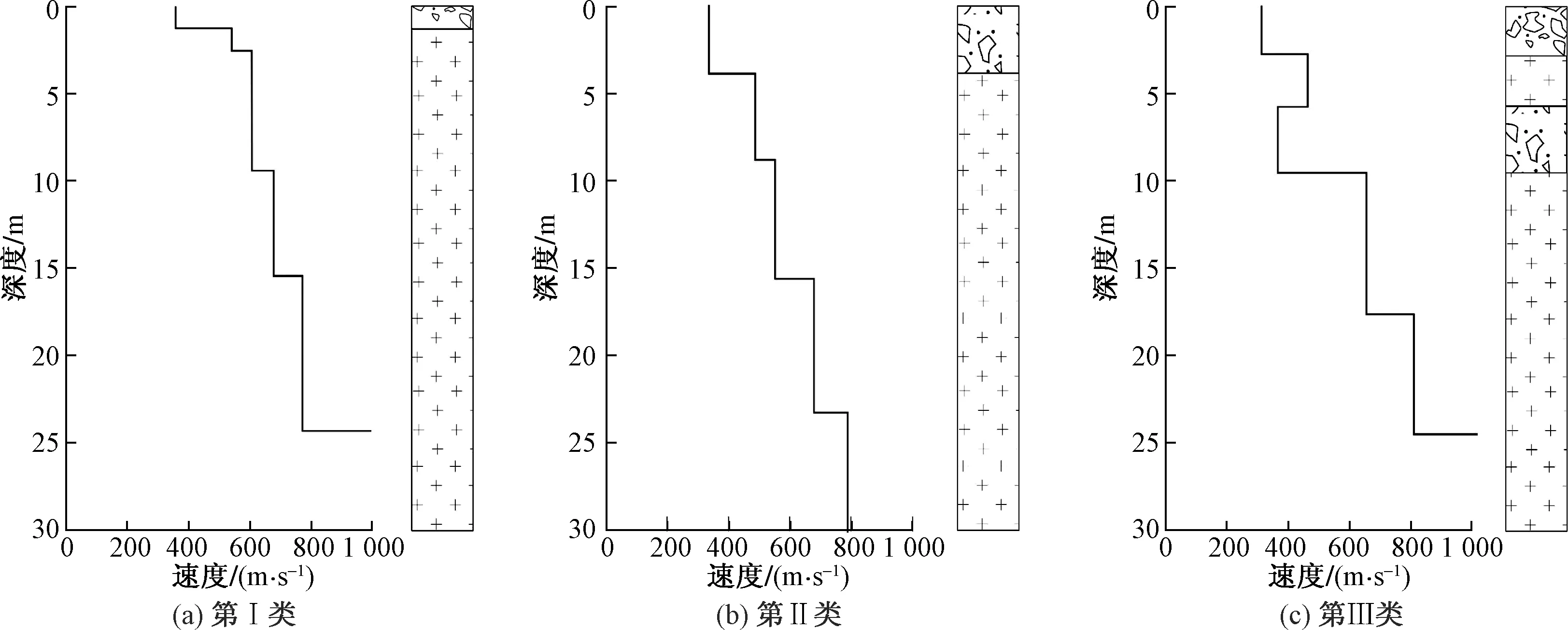
图7 HVSR反演地层类型
第Ⅱ类为浅基岩型。这种类型地层地面为上覆土/碎石,基岩面在上覆层之下,上覆层的厚度整体为1~2 m,基岩面以下地层结构稳定,测点占总测点数的25%左右,场地具有一定程度的施工风险,如图7(b)所示。
第Ⅲ类为深基岩型。这种类型地层浅层为上覆土/碎石与岩石的互层,基岩面深度较深,整体深度为7~8 m,最深处超过10 m,基岩面以上存在多个地层分界面,地层结构不稳定,测点占总测点数的15%左右,场地施工风险较高,如图7(c)所示。
本次微动探测获取了测区的地层结构及基岩面信息,将场地类型划分为Ⅰ、Ⅱ、Ⅲ类(图8),将第Ⅱ、Ⅲ类存在地质风险的地层分布位置进行了重点标注,与施工方进行了沟通,验证准确度在90%以上。
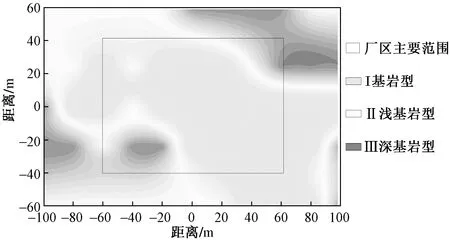
图8 测区场地类型分布
通过对可能影响工程施工的风险区域提前进行了工程处理,保障了工程施工的安全,使得砂厂按质按量建设完工。
2.3 综合成果展示
2.3.1 三维建模
在机制砂厂建设完成后,利用大疆M300无人机搭载五目相机及P1相机对厂区及附近约3 km2区域进行倾斜摄影数据采集,共完成14 027张倾斜摄影照片的采集,如图9所示。
利用飞马SLAM100对厂区及其内部设备进行三维激光扫描,总面积约为200 m×120 m,共完成30组高精度的三维点云数据采集,单位点云密度大于100/m2,如图10所示。
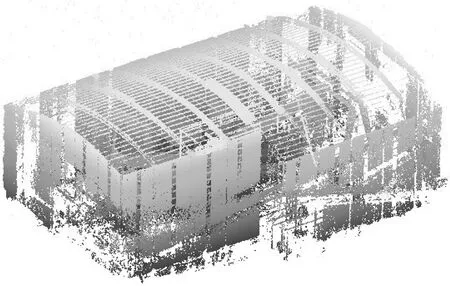
图10 三维激光扫描点云数据
在完成倾斜摄影及三维激光数据采集后,按照设置坐标控制点、空三加密处理、建立密集点云、融合三维激光扫描数据、三角网格化、构建网格纹理的处理流程,重建了测区的高精度三维场景。
2.3.2 成果展示
传统的地质勘探成果以数据剖面图、平面图为主,往往难以展示测区的环境信息,部分可以通过结合卫星图等地图资源的方式解决一定的地理信息问题,但由于卫星图等地图的精度差,误差一般在十几米到几十米,且数据更新速度慢,更新周期通常在几个月或几年,不能真实地反映测区环境的变化。
利用三维建模技术对测区进行三维重建,结合地理信息系统(geographic information system,GIS)信息实现测区精准位置的确定。同时,根据需要可随时更新模型数据,保持与实际场景的一致。在精度方面,环境模型的精度控制在厘米级,厂区及仪器设备的建模精度达到毫米级。
将微动探测成果如基岩面深度等值线图等,搭载到三维数据平台,直观地展示了厂区的基岩面分布情况,真实地还原了厂区周围的环境信息,解决了传统地质勘探成果在展示上的难题。
3 结论与展望
首次提出将微动探测技术用于铁路机制砂厂并成功实现应用,通过对微动SPAC法、F-K法及HVSR的适应性研究,优选了适合本测区的HVSR法。通过HVSR曲线的反演将探测区域划分为基岩型、浅基岩型及深基岩型三种场地类型,提示了其可能存在的地质风险,为工程施工提前处理提供了数据支撑,并且取得了良好的应用效果。在成果展示方面,创新性地利用三维数据平台进行探测成果的展示,将GIS信息、环境信息、厂区信息及微动成果进行了融合,达到了很好的展示效果,值得在铁路其他机制砂厂项目中进行推广应用。
同时,基于本文构建的三维数据平台提供了地质灾害预警、数字化管理等服务的可能,符合数字化、智能化的发展趋势。
