茶叶机械化采摘技术研究现状与展望*
2023-10-09郑航傅童薛向磊叶云翔俞国红
郑航,傅童,薛向磊,叶云翔,俞国红
(1. 浙江省农业科学院农业装备研究所,杭州市,310021; 2. 浙江科技学院生物与化学工程学院,杭州市,310023)
0 引言
中国是世界茶叶的原产地,也是世界上茶叶生产、消费、出口最大的国家。2022年全球茶叶产量达6 397 kt,其中中国茶叶总产量达到3 181 kt,占据全球第一[1]。2022年中国茶园总面积3 330.3 khm2,同比增长2.03%,其中,采摘面积3 026.6 khm2,同比增长3.78%[2-3]。随着茶园面积不断增大,茶叶生产所需劳动力的缺口将日渐扩大。
茶产业属于劳动密集型产业,其中鲜叶采摘修剪季节性强、用工量最多、最集中、成本最高,人工采茶修剪占茶叶生产成本60%以上。随着我国茶叶市场扩大和人们消费水平提高,茶叶需求日益增长,若只单靠传统的手工采茶,已经不能满足市场需求,而现阶段我国农村劳动力不断下滑,“用工荒”和“用工贵”问题日益明显,成为制约我国茶叶规模化生产发展的“瓶颈”,茶叶采摘机械化是未来茶叶生产发展的趋势。
1 我国茶叶采摘农艺要求
1.1 采摘标准
茶叶采摘在茶产品的制作过程中十分关键,不同品级种类的茶叶有着不一的标准,一般分为大宗茶、名优茶、特种茶和边销茶[4]。首先是大宗茶的采摘,此类茶对于茶叶的鲜嫩要求程度不高,采摘一般采取适中采摘,通常以一芽两叶为主,兼采一芽三叶[5],此类茶目前能实现机械化采摘;名优茶,此类茶对叶芽鲜嫩程度和完好程度有着较高的要求,一般采摘一芽一叶或一芽一叶初展,有的甚至只采单个茶芽[6];特种茶,此类茶在新梢长到3~5叶,顶叶六七成开面时,采下2~4叶,茶叶完全展开呈开面状态时采摘[7],通常用于制乌龙茶,叶片基本成熟时,茶叶的内部物质含量丰富,使得成茶具有特殊的风味和香气[8];边销茶,此类茶主要供销于边疆有需要的少数民族,一般需要在新梢基本成熟时进行采收,为了提升作物经济价值也可提前进行一次芽叶的采收[9],茶叶分类示意如图1所示,其对应的不同采摘标准如表1所示。
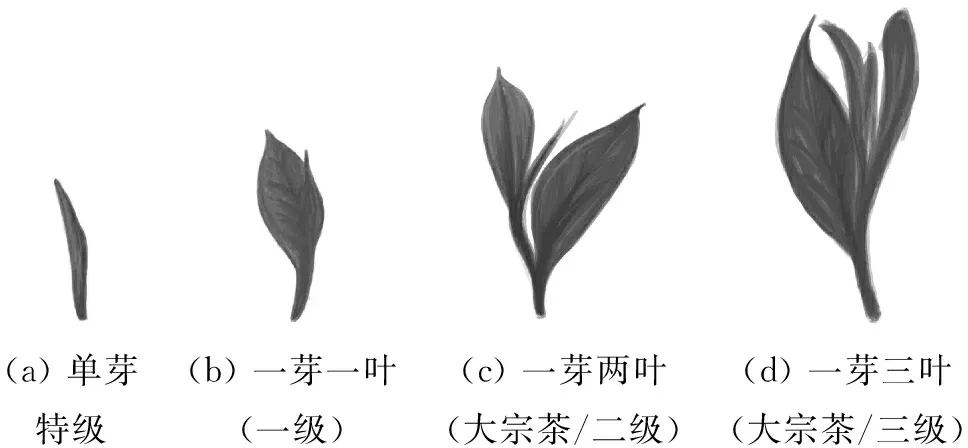
图1 茶叶分类示意图Fig. 1 Diagram of tea classification

表1 不同种类茶叶采摘标准Tab. 1 Picking standards for different types of tea
1.2 机采农艺要求
在机采农艺要求方面,需要对已种植的茶垄、蓬面修剪整形使得其形成统一高度的弧形或平形冠面。采用“四个一致性”将茶园规范标准化,即修剪整形与机采所选取的割刀参数一致、所用割刀中心轨迹线与待采茶垄蓬面中心线一致、放置架上割刀同水平面位置一致、割刀所处放置架位置离地面高度相对一致。通过标准化的农艺修剪培育适合自走机械采摘的茶垄冠面[10]。机采要考虑到设备的适用性,一般选择平地、15°以下的缓坡或等高梯地、土层深厚的地方[11]。新茶园需采用条栽方式种植,株距20~30 cm、行距150~180 cm、行长30~50 m。对于陡坡阶梯茶园,梯面的宽度应不小于2 m,距内侧1 m处单行种植,每增植一行梯宽需增加150~180 cm。茶园四周还需留有2 m左右的通道,每隔30~50 m修建一条人行道[12-13]。机采的适期一般为标准新梢达到60%~80%时,一年机采4~6批次[14]。
2 茶叶采摘装备与技术研究现状
目前,茶叶采摘技术与装备主要有基于往复式切割原理的大宗茶采收装备和基于芽叶智能识别的选择性名优茶采收装备。
大宗茶采收装备方面,较为成熟的有小型单人手持式、双人手抬式以及乘坐式采摘机械,其中单人手持式采茶机和双人手抬式采茶机应用最为广泛,而乘坐式(自走式)采茶装备国内未大范围推广使用,主要因为我国丘陵山区茶园存在坡度较大,标准茶园很少,且茶行沟内坑洼不平,茶园行距多变、蓬面不规整、茶行侧沟高度差等,国外成熟的乘坐式采茶机不适应我国山区茶园的作业环境。在名优茶选择性采摘技术方面,目前不少研究机构研究采摘割台的茶蓬自动仿形技术、智能识别和精准采摘技术,但都未形成可以推广应用的茶叶智能化采摘装备。
2.1 茶叶采摘装备
2.1.1 大宗茶单人采茶机
单人采茶机按照动力源不同分为单人手持式采茶机和单人背负式采茶机。如4CD-30B型单人手持式采茶机[15],主要由偏心机构、切割刀片、减速机构、电机、电池、集叶盒组成,工作时通过电机经减速装置减速后带动偏心机构的输入轴,偏心机构上下偏心轮在输入轴上错开180°布置,分别带动上下切割片的相对运动,达到切割芽叶的需求。NV60H型单人背负式采茶机[16],主要由切割刀片、偏心机构、汽油机、传动软轴、风机、减速装置、集叶袋等组成。其切割原理是由刀片往复式运动收获芽叶,动力源为汽油机需采摘人员背负于身上,通过软轴将汽油机动力传递给偏心机构和风机,切割后芽叶由风机通过送风管吹进集叶袋,集叶袋需要额外人员配合使用。单人采茶机机型成熟,茶园应用广泛,手持式采茶机采用电机作为动力源,结构轻巧便简,单人即可操作,使用灵活,适用于小规模或山地茶园的采摘,但采摘幅宽较小效率不够高,且受电池续航能力影响大,不能长时间连续作业;背负式采茶机采摘宽幅较大,效率较好,但机体质量较重,人工劳动强度大且需要配合人员辅助接袋,操作便利性较差。
2.1.2 大宗茶双人采茶机
双人采茶机能够改善单人采茶机效率不高的问题。现众多茶园市面上选择的双人采茶机以日本进口为主,如SV-100型双人手抬式采茶机[17]。双人手抬式采茶机的构成与工作原理与单人背负式采茶机相似,目前国内茶园在一些梯田和缓坡地带使用最多的就是双人手抬式茶叶采摘机,这种机器作业时需两人手抬,还需两人手持收集袋,双人手抬式采茶机结构简单,操作便捷,已在我国丘陵山地茶园应用,但因采摘效率低、消耗作业人数较多以及操作舒适度差等缺点限制了进一步推广使用。
2.1.3 大宗茶乘坐式(自走式)采茶机
乘坐式采茶机国内外都有较多的研究,日本是世界上最早开展采茶机械化研究的国家。如KJ4N型履带式乘坐式采茶机,采用柴油驱动,重量1 370 kg,作业能力达到0.1 hm2/h,可容量茶青240 kg,通过选择不同刀片实现茶叶采摘、轻修剪和深修剪等作业,整机技术成熟。OHL-5D型履带式乘坐式采茶机,采用全液压驱动,横跨采摘作业,能较好满足大宗茶采摘要求,适用于平原以及丘陵缓坡(15°以下)茶园。国内有的茶园为提升生产效率引进部分外产采茶机,国外的乘坐式采茶机只能适用于标准化茶园,而我国丘陵山区茶园坡度较大,且茶行沟内坑洼不平,茶园行距多变、蓬面不规整、茶行侧沟高度差等,这些机型引入国内后难以适应国内茶园种植大环境。
为了改善单人、双人采茶装备采摘效率不能满足当下茶叶采摘的问题,国内也开展了乘坐式采茶机的相关研究,通过考虑采摘效率、实际作业环境、刀具仿形切割、设备生产使用成本等方面,有了一定的研究成果。如4CJ-20型乘坐自走式全自动采茶机[18],该采茶机仍使用经典往复切割作业方式,采摘幅宽1.2 m,刀片双动,单台作业效率为0.2~0.53 hm2/h,解决了传统的手抬式采摘机需要多人配合作业的劳动困局,但此设备不能调节刀架,对茶园有规范化要求。后续研制的3TG-1500型自走采茶机[19],采用全液压驱动、跨行乘坐式采茶,具有通过能力强,行驶、转向灵活,操作方便,采摘设备高度调节方便等特点。
如图2所示轻便自走式大宗茶采摘样机,设计了轻简化移动动力底盘,机具快速挂接模块,可以方便进行不同作业机具的快速装卸,实现采摘、修剪一体化功能,结构简单,实用性强且机器造价成本低,易于推广。
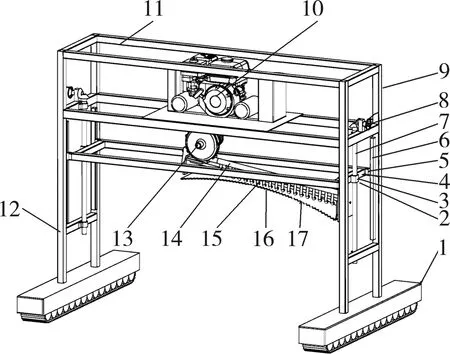
图2 轻便自走式大宗茶采摘机Fig. 2 Lightweight self-propelled bulk tea picker1.行走底盘 2.升降机构 3.螺母 4.升降横梁 5.滑块 6.导轨 7.丝杆 8.驱动机构 9.机架 10.汽油机 11.横梁固定机架 12.竖梁支架 13.鼓风机 14.排风管 15.吹风嘴 16.采摘装置 17.切割刀片
考虑到现有采茶机不能对茶树弧形顶梢芽叶高效自动化的采收,陈建能等[20]发明了如图3所示的一种超声波测距的自动仿形采茶装置,该装置通过仿形支撑组件悬挂采茶单元,通过超声波传感器对茶树的树冠高度进行检测,在丝杆和滑台的配合下实现对茶垄顶梢芽叶的仿形自动采收,但超声波检测易受到采摘自然环境的影响导致采收效果不佳。
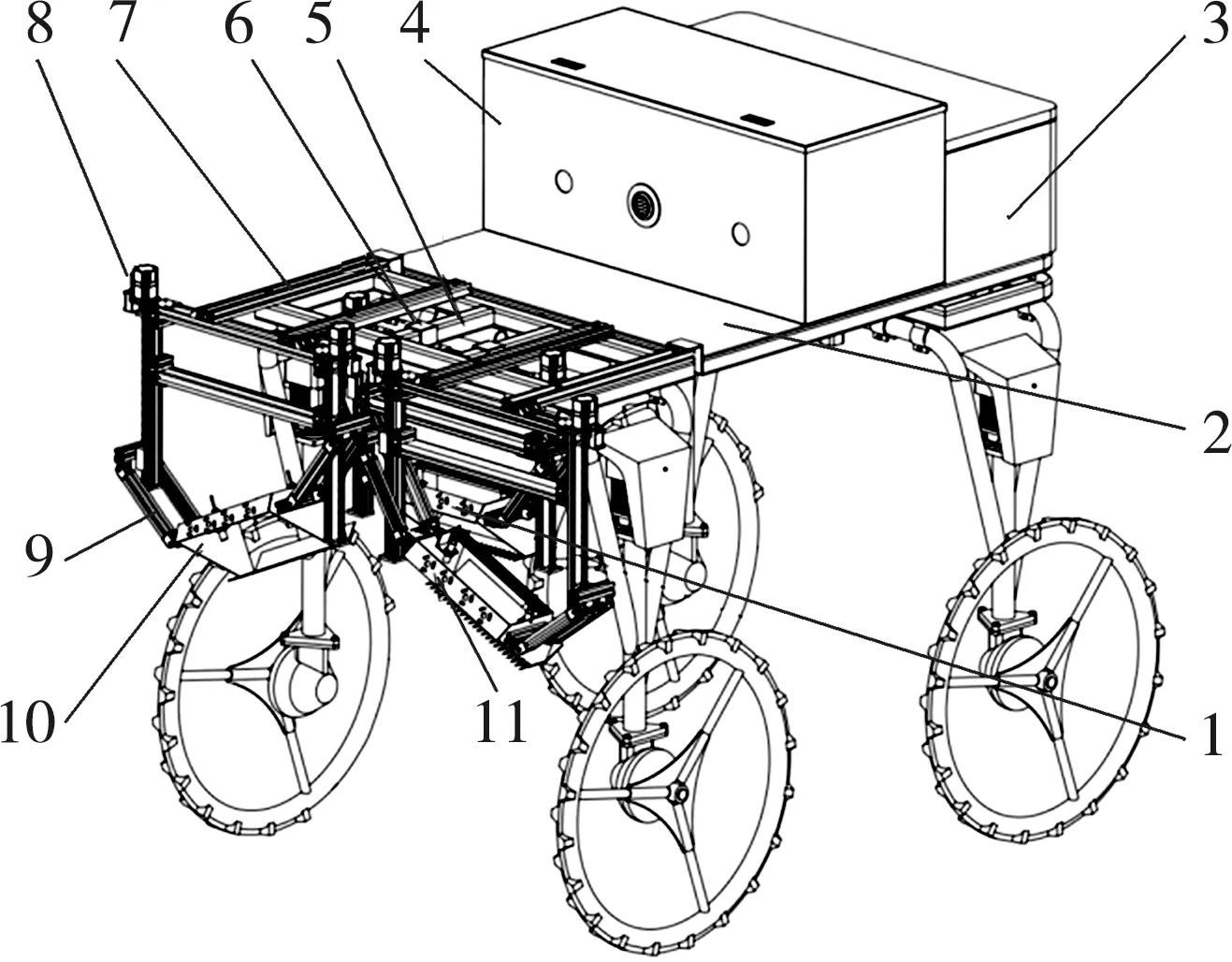
图3 超声波测距自动仿形采茶装置Fig. 3 Ultrasonic ranging automatic profiling tea picking device1.中仿形采茶单元 2.移动平台 3.平台控制柜 4.仿形采茶单元控制柜 5.移动平台机架 6.钣金件 7.长臂支持型材 8.伺服电机 9.摆臂 10.左仿形采茶单元 11.右仿形采茶单元
如图4所示,李尚庆等[21]发明了一种茶园自走式采茶机。该装置包括行走机构、升降机构、连接臂等。此装置通过操作人员判断茶蓬的高度,适时调节采茶机构与茶蓬间距,对茶叶进行准确的采收。其优点在于结构简单、操作方便、特别适合梯田茶园的茶叶采集。闫晶晶[22]利用挡板接触茶蓬面角度的变化实时检测茶蓬高度,通过角度传感器与PLC结合控制割刀的上升与下降,该设计方案为大宗茶仿形采收提供了一定思路和方向。
(a) 自走式采茶机
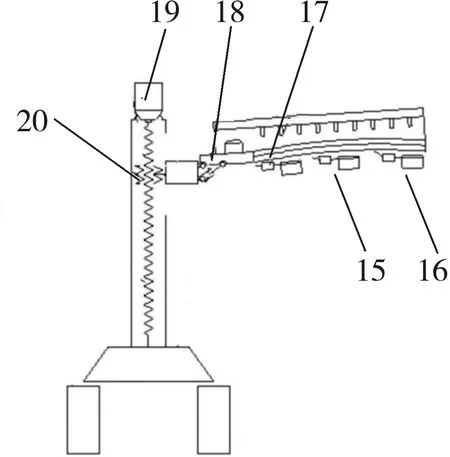
(b) 接触式仿形自走式采茶机图4 茶园自走式采茶机Fig. 4 Tea garden self-propelled tea picker1.风机、风管 2.往复式切割器 3.汽油发动机 4.采茶机架 5.连接臂 6.驱动电机 7.轴套 8.丝杆 9.螺母 10.底座 11.行走机架 12.汽油发动机 13.底盘 14.履带 15.高度传感装置 16.角度传感装置 17.传感装置 18.切割器 19.上下移动电机 20.螺母
2.1.4 名优茶采摘装备
名优茶对芽叶采摘位置精度要求更高,现有研究方案一般是利用图像处理确立芽叶位置信息再通过相关并联机构、机械手、末端执行器等进行采收。对于茶叶外观和品质要求较高的名优茶机械化采摘,一直以来都是国内外茶叶机械专家研究的重点和难点,目前仍处于样机试验阶段,还没有成熟的产品投入实际应用。
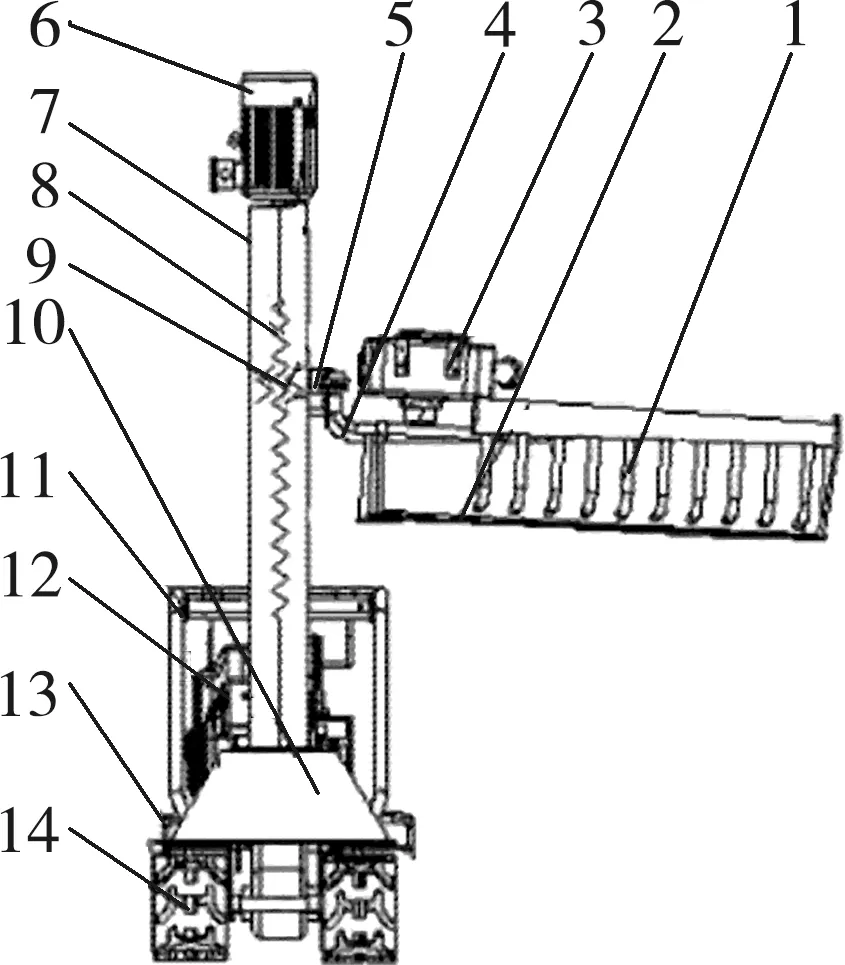
陈志标等[23]设计了一种手持式采茶机,如图5所示。该装置设计考虑了芽叶的脆弱性,使用时需操作人员判断芽叶位置,再利用置于前端的刀片切割代替人手采摘,通过柔性皮带机构将芽叶传送至储叶罐。该设备有一定的实际应用,减少了收获人员劳动强度,但待采茶叶不易对准,对于芽叶的采摘分选还是得依靠采摘人员的经验,长时间使用舒适度欠佳。

图5 手持式采茶机Fig. 5 Handheld tea picker1.储茶罐 2.把手部 3.进茶口 4.第一带轮 5.软质皮带 6.带轮架 7.上安装板 8.下安装板 9.电机
Kurena等[24]设计了一种仿真末端执行器,通过模仿人工采茶动作,用两个机械手指实现茶叶嫩芽叶茎的采摘。郝淼等[25]设计了一种茶叶仿生采摘手抓(图6),可以模仿人工采摘动作。对机构结构几何参数优化使得驱动力传递效率提高,室内初步实验采摘成功率近70%。贾江鸣等[26]设计了一款手持式名优茶嫩梢采摘机械手(图7),通过模拟人手指夹住茶叶提采的过程完成了机械手的设计并进行了优化试验,在采摘试验中采摘成功率为74.3%。

图6 仿生采茶机Fig. 6 Bionic tea picking machine1.芯轴 2.里层套 3.下连杆 4.内连杆 5.上连杆 6.中层套 7.外层套 8.提拉气缸 9.夹持气缸 10.提拉气缸
(a) 前视图
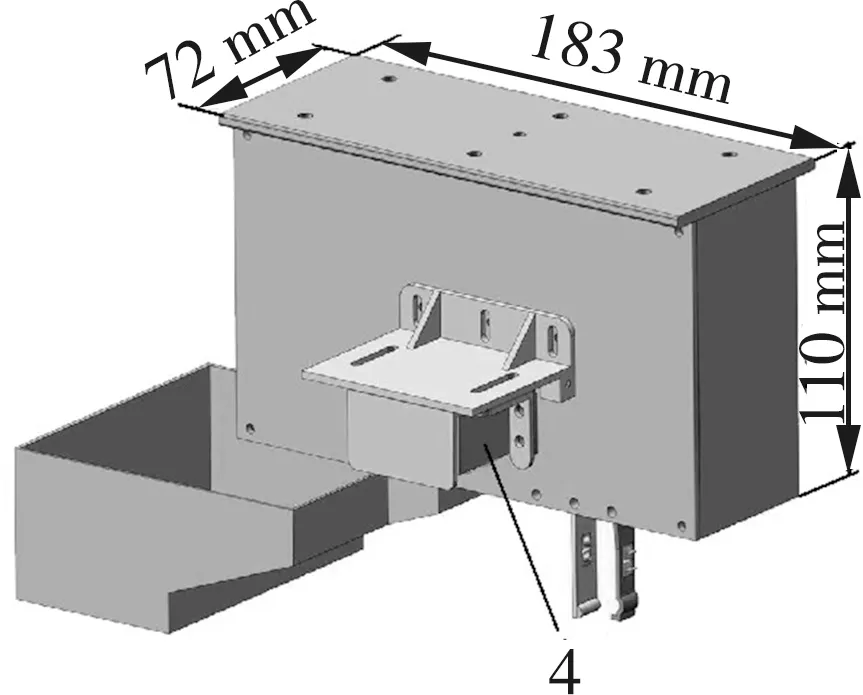
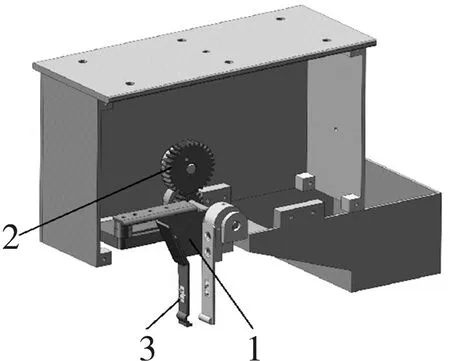
(b) 后视图图7 手持仿生采摘机械手Fig. 7 Hand held bionic picking manipulator1.采摘机构 2.送料机构 3.对射光电开关 4.舵机
自走式名优茶采摘装备利用双目摄像头采集图像信息并对芽叶精准定位识别率达85%。确定芽叶位置后利用机械臂顶端小剪刀剪切,剪切完成后利用负压吸管将芽叶收集到储茶装置中,但该装置目前采摘效率较低还需优化。
2.2 茶叶采摘技术
2.2.1 采摘机构
目前采茶机械实际应用较多的机型采用往复式切割原理[27]。如图8所示,通过往复式切割刀片割断嫩叶枝条,利用风机总成将切割下来的嫩叶吹入收集装置中,实现茶叶收集。
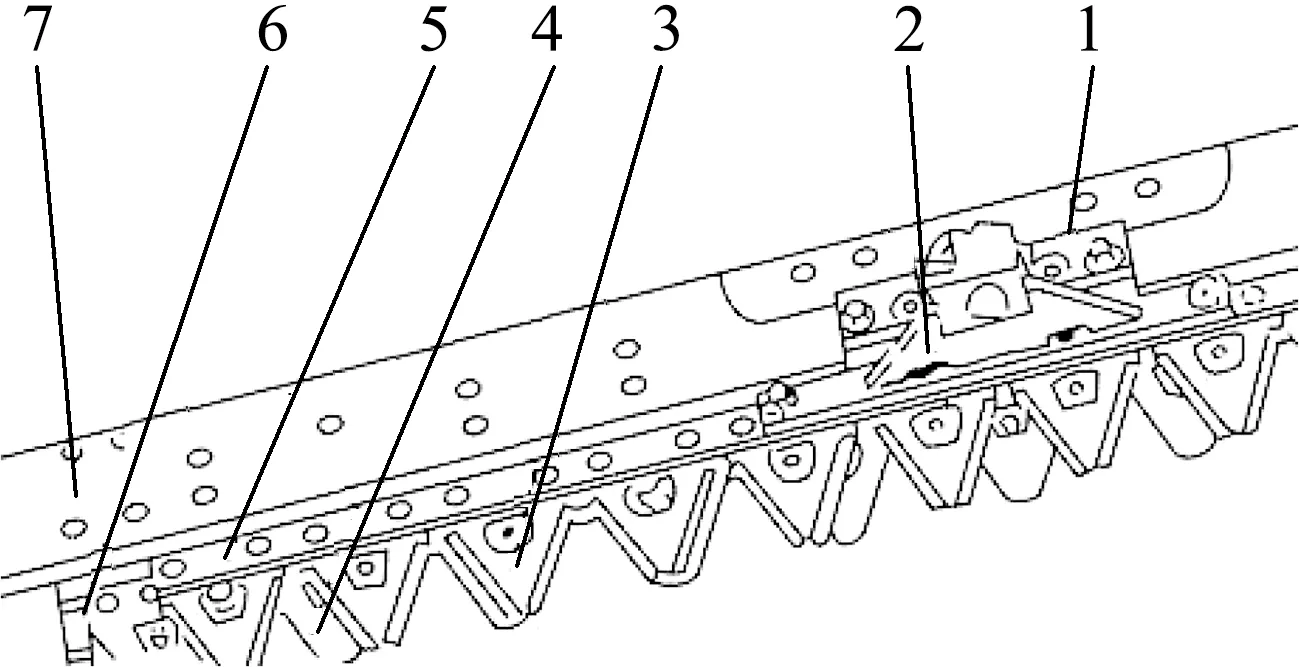
图8 往复式切割模型Fig. 8 Reciprocating cutting model1.下刀头 2.上刀头 3.上动刀 4.下动刀 5.上刀架 6.下刀架 7.刀架
如图9所示,切割器的切割原理是割刀在曲柄连杆机构的作用下做往复直线运动,在护刃器的配合下完成切割动作,图中Ⅰ、Ⅱ、Ⅲ分别为一次性切割区、重割区和漏割区。一次切割区是芽叶经过动刀片的刃线再配合定刀片所产生的切割区域,而在重割区是收获物在刃线经过两次所产生的,此时会造成过度切割产生碎叶或者残茬,漏割区是芽叶在一次切割的行程中未经过割刀刃线的区域,会导致漏割。
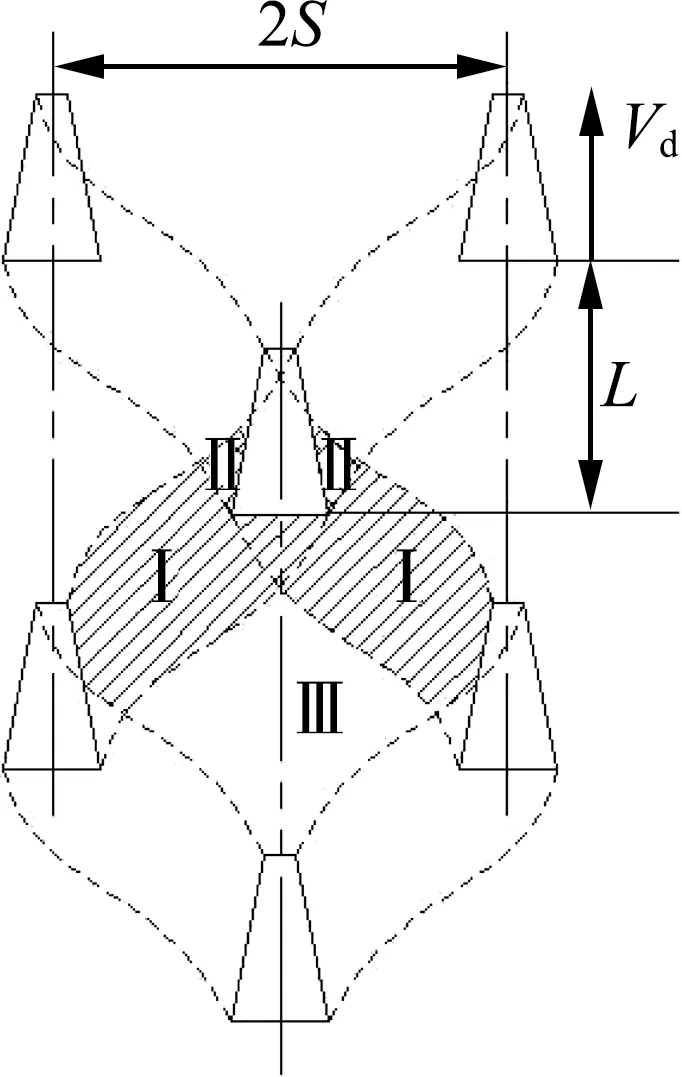
图9 往复式切割原理图Fig. 9 Reciprocating cutting schematic
名优茶对芽叶采摘位置精度要求更高,现有研究方案一般是利用图像处理确立芽叶位置信息再通过相关并联机构、机械手、末端执行器等进行采收。对于茶叶外观和品质要求较高的名优茶机械化采摘,一直以来都是国内外茶叶机械专家研究的重点和难点,目前仍处于样机试验阶段,还没有成熟的产品投入实际应用。对于名优茶的采摘不能采用往复式刀片“一刀切”,需要对芽叶细采。按照采摘机构的原理不同大致分为剪切式、仿生式、气吸式,总结如表2所示。
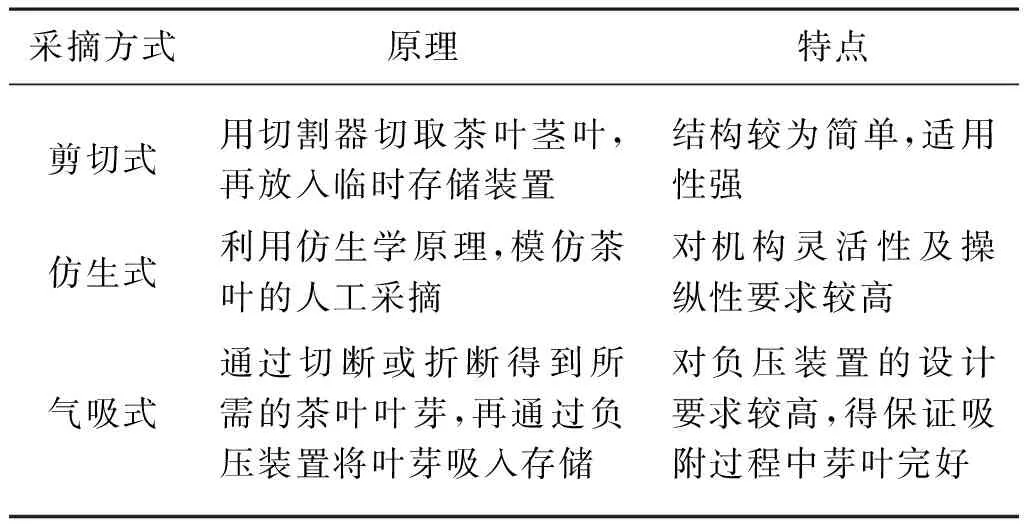
表2 选择性采摘机构区分Tab. 2 Selective harvesting mechanism discrimination
2.2.2 嫩芽识别与仿形采摘技术
茶叶采摘过程中芽叶识别及其位置判断十分重要。现有茶叶采摘装备大多需要操作人员判断刀具切割位置,调整刀具切割高度,在实际作业中,茶蓬面高低不一且茶园多处丘陵坡地不能保证刀具实时处在良好的切割位置,导致茶叶采摘质量不理想。 为了代替人工识别,国内外研究学者都进行了相关研究并取得了成果。
在机具工作过程中为了获取待采芽叶的位置信息,相关研究学者研究了相关嫩芽识别与仿形采摘技术,按照识别方式主要分为接触式识别(图10)和非接触式识别(图11)。接触式识别通过机具构件与茶蓬面接触获取蓬面高度变化数据调整刀具切割位置实现仿形采摘,非接触式识别包含利用超声波测距感知茶蓬面高度变化、激光雷达对茶蓬面曲线拟合、基于机器视觉图像处理对芽叶位置判断等,通过获取采摘装置与茶蓬面实时距离的变化对采摘装置控制实现高效采收。仿形采摘技术能够有效提高采摘茶叶收获效率和质量,减少漏采和芽叶破损率。如闫晶晶[22]选用了丝杆螺母装置搭建升降机构,可实现采茶机头的上升与下降,挂接在刀具前的挡板与茶蓬面接触感知茶蓬面形态变化,通过角度传感器与PLC的结合使采茶机可以检测茶蓬高度来控制采茶机头的上升与下降;董春旺等[28]发明了一种仿生刀具、采茶装置,通过激光雷达和采茶机构的协同作用,激光雷达传感器对茶树蓬面曲线拟合,准确匹配刀具与茶树蓬面,对茶垄顶梢芽叶进行自动仿形采收;王财盛等[29]提出了一种基于机器视觉的采茶机割刀控制方法,可以提取茶叶图像中的嫩芽区域,并设计间接定位法定位弧形割刀位置达到仿形采摘的目的;赵润茂等[30]利用超声波传感器感知往复式割刀与茶蓬面间距离信息,通过丝杆实现切割装置的仿形运动控制,利Hampel滤波和低通滤波算法对距离信息在线预处理,并设计了基于非线性跟踪微分器仿形控制率PNTD,研制出了分布控制的乘坐式仿形采茶原型机。

图10 接触式识别流程图Fig. 10 Contact identification flow chart
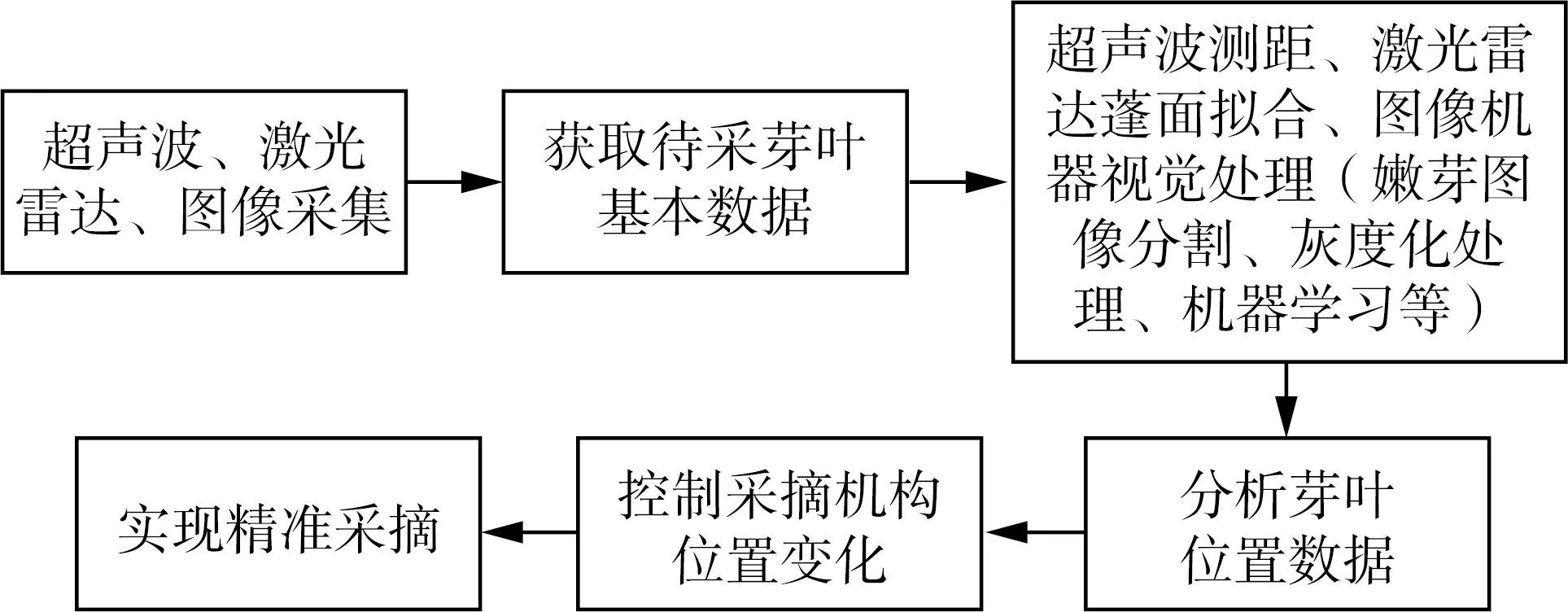
图11 非接触式识别流程图Fig. 11 Non-contact identification flow chart
在算法设计方面,张雯娟[31]针对在户外环境、自然光照下的茶叶图像,提出了一种基于ResNet和U-Net的茶叶嫩芽图像分割方法用于分割出自然背景下的茶叶嫩芽。张博[32]展开了基于RGB-D的茶叶识别与定位技术研究依靠嫩芽与背景(老叶、茎、土壤)颜色和大小的不同在彩色图像上进行识别。对彩色图像在RGB、HSL、HSV、HSI色彩空间进行灰度化处理,在对灰度图像进行去噪、分割后进行形态学操作和颗粒特征分析最终实现了嫩芽识别。王琨等[33]基于颜色及区域生长实现茶叶嫩芽图像分割。国外学者Paranavithana等[34]在芽叶的精准识别方面提出了一种基于卷积神经网络(CNN)的茶叶采摘适宜性识别,建立了相关预测模型。其模型识别精度达到70.15%,能够达到一定的分类效果,为名优茶采摘奠定一定基础。
综上所述,现有嫩芽识别和仿形采摘技术研究有了一定成果,但还不能够投入实际生产使用当中,大多处于理论待实际验证阶段。超声波、激光雷达等传感器受环境因素影响较大具有不稳定性,另外茶园收获环境复杂,实际工作中易受到环境干扰导致效果不理想,对地形适应性上面临很大的挑战。通过图像识别和计算机处理辅助机械手、并联机构末端执行器等采摘达到一定理论效果,但采摘效率较低,暂时难以替代人工采摘。
2.2.3 动力系统及操作方式
茶叶采摘装备按动力区分一般为电动和汽油动,操作方式分为手抬式、背负式、乘坐式、手推式等。茶叶采摘装备动力系统及操作方式汇总如表3所示。
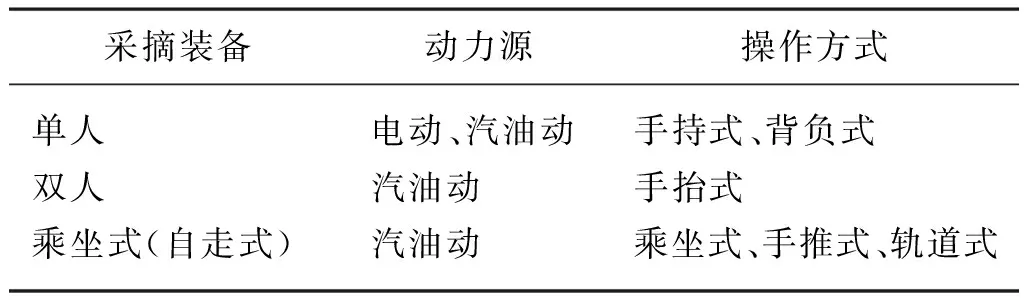
表3 不同种类采摘装备动力源及操作方式区分Tab. 3 Differentiation of power source and operation mode of different kinds of harvesting equipment
单人、双人采茶机成本较低,动力源一般为电动和机动。电动采摘装备因为以电池提供动力,采摘过程中工作续航能力较弱不能满足高效工作,且此类机型通过操作人员背负、手持、手抬仍会带来较大的劳动强度,虽对比手工采摘效率有一定提升,但单人、双人采茶机的使用已经不能满足茶行业的发展,需要更多地推广使用大型茶叶采摘装备。乘坐式(自走式)采摘装备能够较大减轻操作人员的劳动强度,大宗茶乘坐式(自走式)采摘装备一般以汽油机为动力,电池动力源不适用于大型采摘装备,因为电池对续航、制造成本、装备整体重量等方面相较于汽油机有明显短板。乘坐式(自走式)采摘装备拥有高效率、低人力成本的优点,若能良好地推广使用可以解决茶叶采摘过程中劳动力需求过大的问题。
3 存在问题
通过分析现有的茶叶采收技术与装备,虽然我国茶叶采摘已有成熟的机械,但是只能实现外观品质要求不高的大宗茶采摘,且装备的作业效率低,操作舒适度差,而名优茶采摘目前还没有成熟的机械使用,我国茶叶机械化采摘技术水平较低。
3.1 茶园地形条件差,种植不规范
国内茶园种植区60%以上分布在丘陵山区,山区地块小且分散,地形坡度大,茶垄地面坑洼不平,且国内茶园缺乏宜机化规划。各个茶产区茶树高、蓬面和垄沟尺寸差异较大,缺乏合理的机耕道路,种植不规范,造成采摘机械田间作业空间狭窄,运行和转弯困难等问题,难以实施大型机械化作业,只能采用单人或者双人小型采摘机械,作业效率低,劳动强度大。国外大型的乘坐式采茶机受限于国内茶园环境特点,难以大面积推广使用。
3.2 国产采摘机关键部件稳定性、可靠性差
由于国内刀片材料和加工工艺水平达不到国外先进水平,生产出的采茶刀片耐用性较差,长时间使用容易发生磨损或者折断,严重限制了国内手抬式采茶机的推广使用。目前国内使用最多的双人手抬式采摘机大量依赖进口,机器销售价格较高;另外作为自走式高效采茶装备的核心部件,比如液压马达、液压电磁阀等精密元器件以及高强度材质等,国内同类产品稳定性与可靠性较差。这些不足进一步限制了国内智能高效采摘机的研制与推广应用。
3.3 茶叶采摘机具功能单一,智能化水平有待提高
目前使用较成熟的采茶机只能实现大宗茶采摘,存在茶芽老嫩不匀、叶梗混杂、重复切割产生碎渣等现象,无法适用外观品质较高的高档名优茶采摘,对不同种类茶叶采收农艺要求的适应性差,智能化水平低;同时采摘只是茶园生产管理环节之一,机器如果仅能实现采摘,应用时间短,经济效益低,进一步限制了茶叶采摘机械的推广。
4 发展建议
4.1 改进茶园种植模式,促进农艺与农机融合
田地块小、不规整、田间道路狭窄而崎岖不平是目前丘陵山区茶园立地环境的真实反映,在丘陵山区茶园机械化过程中需要解决大型高效机械通行与作业“方便性”问题,因而必须在农田道路基础设施完善与农机研制创新两方面同时着力。按照将“小田变大、角田变方、坡田变平”的要求,将零散细碎农田重新规划整理,形成“适机农田”,同时加强农村机耕道路建设,尽量把机耕道拉通到山头田垄,方便农机作业和通行;另外探索并规范适合机采的修剪形式、茶蓬高度、修剪次数与修剪期等,以及适合机采茶树品种的选育等,创造适合机械化作业的生产条件。
4.2 基础研究与先进技术的综合应用
自走式采茶机具有作业效率高、操作舒适好、消耗劳动力数量少等优点,因此开发出适合我国茶园特点的自走式高效茶叶采摘机是我国茶叶机械发展的必然选择。需要组织农机科研院所与相关生产企业、推广部门加强信息沟通交流,加大对茶叶采摘装备研发的系统研究、资金投入和协同攻关。应当从基础的机理方面入手,重视核心关键技术基础理论的研究,提高制造材料性能、加工工艺水平以及动力单元性能。同时,引进先进智能控制技术、机器视觉技术、传感器技术等,将人工智能运用到茶叶采摘机具研发中,加速技术融合转化,有利于机具研发质量的提高。
4.3 提高茶叶采收机的通用性
我国茶园地形条件复杂,不同区域茶叶种植模式差异明显,老茶园宜机化改造成本巨大,因此设计高效自走式采茶机,需要满足底盘间距能够可调以适应不同茶棚宽度,机架具备自适应仿形以适应茶行双侧沟高度差,同时具备作业部件快速连接接口,通过合理的结构设计、更换不同作业机具,实现一机多用,拓展机具的作业功能,提高机具的通用性和利用率;在一次性采摘方式的基础上,研发采摘机具能够同时适用大宗茶采摘于名优茶采摘,通过研发茶棚面的自适应仿形技术、行走底盘与采摘作业装置的协同控制技术以及采后智能分级分选技术来提高名优茶机械化采摘的质量品质。
4.4 加强新型采茶机型研发与推广政策
2021年中央一号文件明确指出:提高我国农机装备自主研制能力,支持高端智能、丘陵山区农机装备的研发制造,加大购置补贴力度,开展农机作业补贴。因此,政府应加强对适用于我国茶叶自走式智能采摘机研究和推广的重视程度,加大茶叶采摘技术与装备的研发资金投入,创新制定茶叶新型机械“首台套”政策和购置补贴政策,建立标准化茶园机械化采摘示范基地,加强新机具的宣传与操作培训,扶持培育一批创新型研发制造茶机企业,提升我国茶叶机械化水平。
5 结论
1) 大宗茶的采摘技术与装备较为成熟,很多机型已经市场化应用,但国内现应用较多的手抬式大宗茶采摘机消耗操作人数多,国外直接引进乘坐式采茶机不适用我国复杂地形丘陵茶园和非标准化茶园的特征,国内现有乘坐式采茶机技术装备还不够成熟,还存在有待解决的问题。
2) 虽对名优茶的采收技术与装备进行了大量深入研究,但由于名优茶严格的外观品质要求,以及复杂的茶园自然环境条件,使其机械化采摘难度远大于大宗茶,距离实际应用还有很长的一段路要走。
3) 改进茶园种植模式,开发适用性强、低成本、高效率的茶叶机械采摘作业设备,同时加强新型采茶机型研发与推广政策,对提高我国茶叶机械化技术水平和茶产业进一步发展具有深远意义。
