三维激光扫描技术在矿山巷道断面测量中的应用
2023-10-09邹江
邹 江
(贵州省有色金属和核工业地质勘查局五总队,贵州 安顺 561000)
0 引言
巷道断面测量是检核巷道开挖质量与设计质量符合情况必不可少的一步,常规的全站仪加控制导线的实测方法效率较低,且只能以点线形式展示巷道开挖情况,无法多角度、立体式呈现巷道施工进度[1-3]。三维激光扫描仪的诞生将测绘技术引领到一种高精度、高效率、无接触式测绘新领域。面对三维激光扫描仪的普及,国内工程院校、科研企事业单位都进行过深入研究与开发,关于该技术在巷道断面测量中的应用相关文献进行了详细阐述。俞艳波、李小松等在《便携式三维激光扫描技术在矿山地下巷道可视化建模中的应用》一文中论述了三维激光扫描技术可用于获取井下巷道的三维可视化模型,为矿山建设监管提供数据支撑[4]。程华伟、钱小峰将三维激光扫描技术与传统测量方法在巷道断面测量中进行对比论证,得出了三维激光扫描技术可以提高巷道建模精度和效率的结论[5]。庞帆、何玉龙等采用端到端定位误差、相对距离误差、绝对点位误差作为精度评测,验证得出三维激光扫描技术在井下巷道测量中能达到厘米级精度[6]。刘宏亮将三维激光扫描技术运用于煤矿井下巷道断面测量及巷道贯通测量,分析得出三维激光扫描技术能有效提高巷道断面测量和贯通测量的效率及精度为巷道施工提供指导依据[7]。王博群等运用空间几何方法从海量三维激光点云数据中快速、高精度地获取到隧道中心点坐标与断面信息[8]。牛家宽、钱小峰在《移动式三维激光扫描技术在矿山测量中的精度及误差分析》中指出移动式三维激光扫描技术具有实时、快速、高精度的优势,建议推广用于矿山采空都区测量、巷道实体测量等矿山测量工作[9]。根据以上文献资料及工程实例论述三维激光扫描技术在井下矿山巷道工程测量、巷道中轴线提取、纵横断面测量、三维建模等方面运用已经逐渐成熟。为此本文在已有研究成果的基础之上,详细介绍三维激光扫描技术应用于巷道断面测量,并在提取断面尺寸流程中介绍了专业应用软件的使用过程。最终通过工程案例验证了三维扫描激光技术获取的断面尺寸与设计值相差较小的结论。
1 TLS技术应用于断面测量的工作流程
三维激光扫描技术应用在矿山井下巷道断面测量获取点云数据流程如图1所示。

巷道区间为狭长空间,对于地面激光扫描仪的架设及外业测量工作极为不利,因此需要到现场进行踏勘,确定测站间距、标靶布设位置。扫描参数的合理设置有利于在确定的巷道长度和精度范围内使用最少的扫描时间,为确保扫描进度高效及点云质量。断面测量的目的是为指导巷道掘进和后续调整巷道中腰线、巷道施工提供基础数据,为了获取区间断面的限界尺寸,点云数据要求为绝对坐标,作业时需要使用贯通测量控制点作为控制基准。三维激光扫描具体实施方案如下:
1)现场踏勘,制定扫描方案,布设控制点:外业扫描前需要收集相关的设计图纸和控制点资料,现场踏勘、确认巷道内的控制点,对可用的控制点标记、保存。标靶点布设要合理,确保每站扫描过程中至少三个标靶在视场之内。标靶点选择为颜色对比鲜艳,反光特性的材料制成,稳固且可靠。
2)外业扫描:考虑到巷道管片没有明显的特征点用于匹配拼接,获取的点云数据要求为绝对坐标,外业扫描采用标靶联系测量法和导线测量法。激光扫描测站及标靶布置如图2所示。

可采用导线将各标靶点与控制点坐标精确的获取,既提高了点云相对精度,又提高了模型的绝对精度,现场导线布设样式如图3所示。主要步骤如下:
a.在扫描前布设导线点,即地面激光扫描仪架站点(A,B,C,D,T1,…,Tn);其中A,B,C,D为已知点。b.仪器架设在B点,A点架设标靶作为后视点,A,B用已知坐标设站方法进行设站测量。c.完成B点设站后开始扫描,同时对T1点架设前视标靶进行精扫。d.T1设站时,将B点作为后视定向点,测站设置完毕开始后续扫描工作,T2点在本次扫描中作为前视点完成点云获取工作。e.后续按照相同的操作步骤完成各站的定向与扫描工作,直至C点结束。仪器高与标靶高在每次架站时都要量取至毫米位,至此各站的点云获取工作与导线测量工作均完成。f.检查各测站的数据质量情况,检查仪器高与标靶高正确与否,有无错漏的情况发生。核对完成后对设站数据进行拼接,拼接报告中可以查看各导线点的坐标信息,导线总长度和闭合差信息。

开始扫描时,从开始的一端优先对控制点上的标靶进行精细扫描,由设备拟合出标靶中心点坐标后进行完整扫描。每一站扫描结束后移动前进方向尾部的两个靶球至前方,保障每相邻两站数据间存在至少4个公共靶球,作为点云拼接的依据。由于井下巷道狭长、内径小,为避免入射角过大时激光采集的数据反射率较低,采用约10 m一个站点的方式,不仅保证了数据的重叠范围,也保证了靶球的可识别率。
3)点云数据预处理:外业工作中获取的原始点云数据需经过加工才可应用,其中包括点云配准、点云去噪、点云模型构建。将不同测站坐标的点云统一至相同坐标系下,为后续工程应用提供数据基础。
a.点云配准:点云配准即将不同测站获取的点云数据变换至统一坐标系下,其中目标点云与参考点云之间寻找对应点成为了关键一步。假设目标点云P与参考点云Q之间存在变换矩阵H,(x,x′)为二者中的对应点,那么对应点之间的转换关系如式(1)所示:
X′=HX
(1)
其中,X和X′分别为x和x′的齐次形式,旋转变换矩阵H是由一个3×3的旋转矩阵R和一个3×1的平移矩阵组成T矩阵(见式(2)):
(2)
关系式也可以表示为:x′=R3×3x+T3×1。
其中,旋转矩阵R3×3为正交旋转矩阵,可以表示为式(3):
(3)
其中,α,β,γ分别为沿x轴、y轴、z轴的旋转角。6个配准参数需要至少三组对应点才能计算出来。
b.点云拼接:点云拼接工作是将具有不同坐标系的点云通过旋转、平移变换为统一坐标系,即点云数据的拼接。本文采用基于控制点的拼接和基于标靶的拼接两种方法。
c.点云去噪:该项工作是将与被测物体无关的多余点云剔除,可通过滤波算法过滤掉误差点与错误点。巷道点云数据中需要剔除的噪声主要包括管道、电线、支撑结构以及工作人员等。
d.点云简化:外业扫描时,点云数据的采样密度较高,存在巨大的数据冗余,造成数据量的庞大,对后期的处理和成图、存储、显示带来困难,同时也造成计算资源和人力资源的浪费,因此对点云数据的简化处理尤为必要。
2 巷道断面数据处理
巷道断面数据处理主要包括:根据设计文件生成线路数据;以设计线路为准进行点云数据切片、中心线提取和限界计算。
1)生成设计线路:针对传统方法在巷道断面数据处理中效率低、三维可视化效果差、检查困难等问题,采用C号编程语言和.NET API对AutoCAD进行二次开发完成的巷道断面数据处理程序。根据设计数据按照一定的间距绘制平曲线和竖曲线及相关控制线。
2)点云切片:点云切片的目的是为点云的拟合做准备。以巷道的设计中线为基准,沿中轴线方向创建垂直于巷道中线的巷道断面,点云数据切片的厚度根据实际需要进行设定。按照设计要求,直线段每6 m、曲线段每4.5 m提取一个断面。
3)椭圆度计算:在提取断面后进行长短半轴的测量,并求取椭圆度,参照式(4)进行计算:
T=2×(a-b)/D
(4)
其中,T为椭圆度;a为长半轴;b为短半轴;D为巷道内径。
4)中心线提取:将切片点云投影到与设计中线垂直的平面上,断面点云坐标由三维空间变换至二维空间,以便于巷道断面拟合。根据转换系数可实现断面点坐标正向转换和反向转换。根据二维平面中断面位置点和噪点判断距离,剔除噪点,然后拟合巷道圆,获取圆心和半径。巷道圆拟合采用最小二乘法进行。
3 工程实例
以贵州某矿为实例,该巷道采用相向掘进的施工方式。为监测巷道施工质量并对已施工区段采取监测,使用LEICA P40激光扫描仪获取点云数据,该仪器的主要技术指标见表1。在巷道的两端设站导线作为掘进定向,同时在导线中架设如上文提到的设站方式,在扫描点云时注重仪器三脚架的稳定性,以防施工区段土质不稳定造成相同测站点云粗差过大的情况发生。

表1 徕卡P40的主要技术指标
为得到扫描区域的整体三维点云数据,仪器参数设置中扫描方式为全景扫描,即竖向270°扫描,横向360°扫描,扫描过程中对标靶球和安置在控制点上的标靶点进行精细扫描,便于后期点云数据的拼接。公共点使用靶球固定在具体的扫描部位上,保证标靶的稳定性且具有一定的高差。为满足点云数据的拼接要求,相邻测站有3个公共点重合。
在外业中获取到点云数据之后,导入软件Cyclone中进行点云去噪、拼接、配准等预处理工作。在Cyclone Register模块下,对预拼接后的点云根据扫描路线进行优化,然后对点云数据进行去噪和抽稀,得到完整的巷道点云数据。点云效果如图4所示。

将点云数据导入3Dreshaper软件中,提取巷道断面的中轴线。本项目采用3Dreshaper软件进行中轴线拟合提取,以圆形为依据创建巷道中线,采用最小二乘法进行拟合。巷道点云提取断面示意如图5所示。

由于断面数据处理工作量较大,依靠巷道断面数据处理程序,可批量处理内业数据,极大地提高了效率,并实现了断面测量数据的三维可视化,在三维空间中便于查询、检查。
程序界面如图6所示。程序使用的主要流程有:1)工程信息配置:设计线路参数。2)运行程序,根据设计参数绘制平曲线和竖曲线,计算逐桩坐标。3)导入断面数据,对每个断面进行空间圆拟合,得到实测圆心和半径。结合设计线路求出横向和竖向偏差,根据巷道断面测量示意图计算出左右横距和顶底点高程。4)将计算成果按照设计要求的格式输出,绘制断面图,断面效果图如图7所示。5)对数据进行检核,如果不合格,对工程配置和线路参数进行检查。对得到的部分结构断面进行分析,参照椭圆度计算公式,计算出椭圆度见表2。


最后拟合出巷道断面的中心,与设计巷道中心点坐标进行对比,得到巷道的限界成果,见表3。实测值与设计值差值均在厘米级别,精度均匀分布,符合相应规范对中心点实测坐标的要求。按照要求的格式整理断面测量成果表,作为后续调整巷道中腰线、巷道坡度基础测量数据。

表2 椭圆度计算成果表
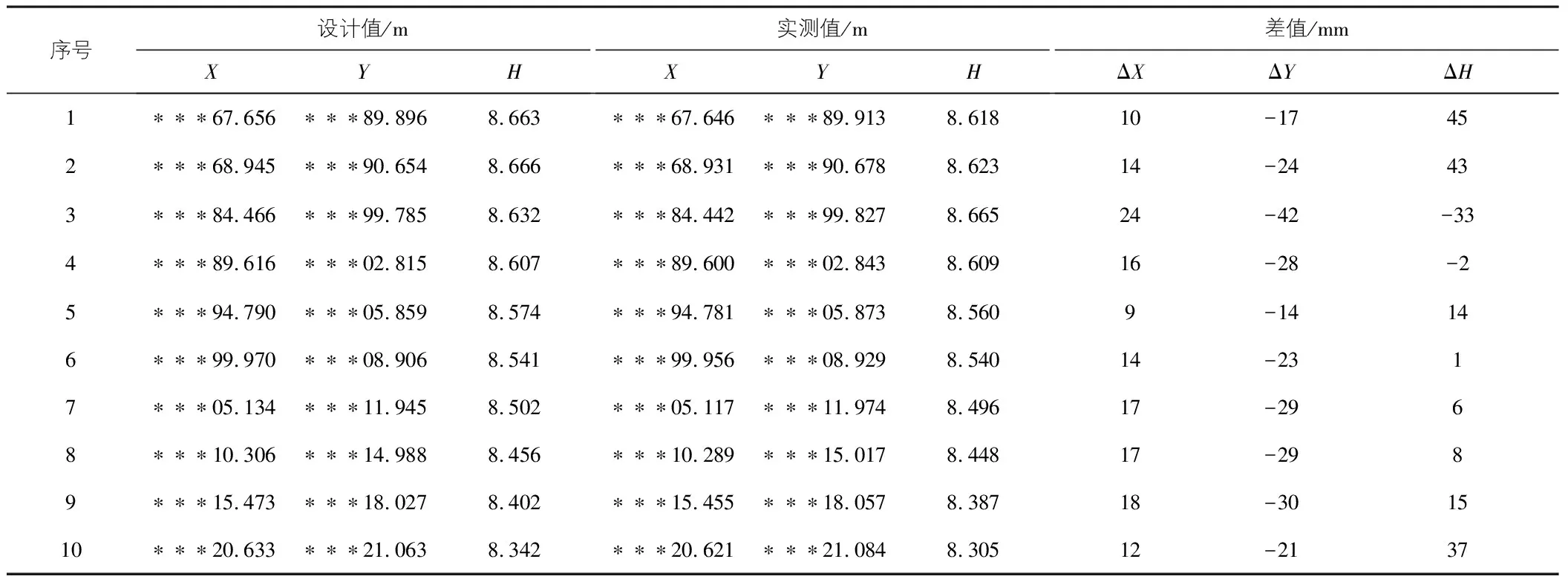
表3 巷道断面测量成果表
4 结语
本文系统性叙述了三维激光扫描仪在巷道断面测量中的外业工作和内业数据处理流程,其中包括了外业使用徕卡P40激光扫描仪获取点云数据,内业使用Cyclone软件进行点云数据预处理。使用3Dreshaper软件以巷道轴线为基准并提取断面数据,采用最小二乘算法对获取的断面数据拟合。通过与巷道设计轴线比较,获取每个断面的限界尺寸。试验结果证明了充分利用三维激光扫描仪技术,可克服传统的全站仪导线测量模式效率低、获取数据单一、断面数量不足等缺点,提高断面测量作业效率及精度,在工程项目中具有较强的实用性。
