自然选择粒子群与电导增量结合算法的MPPT 研究
2023-10-09付祥贵周莉
付祥贵,周莉
(安徽理工大学电气与信息工程学院,安徽淮南 232001)
随着全球能源形势的日益严峻,世界上的能源稀缺逐渐成为影响人类社会的可持续发展的重要因素。光伏太阳能作为一种洁净、环保、可更生的绿色新能源,它逐渐成为世界上所有国家未来能源战略的重要组成部分。在光伏阵列局部遮荫条件下,光伏电池输出功率-电压曲线具有多峰值特性[1]。为了实现对输出功率的最大化利用,且保证快速、准确,对光伏电池全局最大功率点研究的稳定跟踪已成为当今流行的研究方向。
传统跟踪算法,作为干扰观察的方法(P&O)[2-3],电导率增量方法(INC)[4]等很容易陷入理想的局部最优解,无法跳过局部最大功率点,并且跟踪功率浮动很大,极其容易造成功率的大量流失;此外还有智能优化算法例如粒子群算法(PSO)、遗传算法(GA),尽管能在全域范围内找到基本粒子群算法的最佳解,但追踪后期的追踪速度很容易减慢,出现早熟现象,不能很好地处理大规模计算量的问题是遗传算法的缺陷,并且也很容易陷入早熟现象。因此,很多研究人员提出将各种智能算法的优点结合,取长补短,例如粒子群与电导率增量法结合算法[5]、粒子群与扰动观察法结合算法[6]、遗传算法与扰动观察结合算法[7]、遗传算法与BP 神经网络结合算法[8]。
受此启发,本文首先建立光伏电池数学建模,并在正常条件和局部遮荫条件下绘制和分析性光伏输出特曲线。针对在局部遮荫条件下传统电导率增量法容易陷入局部最优解以及追踪精度和稳定性较差的问题,提出了一种自然选择粒子群与电导增量结合算法。首先,利用自然选择粒子群算法快速在最大功率点附近跟踪;其次,使用小步长电导率增量方法准确定位最大功率点;最后,在Matlab/Simulink 仿真结果显示。该结合算法能够有效地克服在局部遮荫下传统电导率增量法容易陷入局部最优解的缺陷,相比于传统电导率增量法,结合算法具有追踪精度良好、稳定性较高的特点。
1 局部遮荫下光伏电池建模及输出特性曲线分析
1.1 光伏电池的数学建模
光伏电池等效电路视为一个恒定电流源Iph和一个二极管D,以及并联电阻Rsh和电池内部串联电阻Rs组成,光伏电池等效电路如图1 所示。

图1 光伏电池等效电路图
根据基尔霍夫电压、电流定律,以及二极管电流与电压关系,简化电池输出电压与输出电流之间关系[9]:
式中:Iph为光伏电池产生的光生电流的数值,单位A;Io为二极管的反向饱和电流的数值,单位A;q为电子所携带的电荷数,为1.6×10-19C;V为光伏电池输出电压的数值,单位V;I为光伏电池输出电流的数值,单位A;Rs为光伏电池串联电阻的数值,单位Ω;n为二极管理想因子数的数值,当T=300 K 时,其值约为2.8;k为玻耳兹曼常数,为1.38×10-23J/K;T为绝对温度的数值,单位K;Rsh为光伏电池并联电阻的数值,单位Ω。
由于式(1)中参数Iph、Rsh、Rs、n和Io对环境变化反应灵敏,难以设置一个准确的数值。式(1)中建立等效电路时Rsh的取值相对较大,并且Rs的取值比较小。那么在常规计算中可以忽略(V+IRs)/Rsh,设定Iph=Isc,在开路状态下,Uoc为开路电压,同时满足I=0,U=Uoc;在最大功率点处需要满足U=Um,I=Im,式(1)可简化为[10]:
式中:Isc为开路电流的数值,单位A;Im为最大电流的数值,单位A;Um为最大电压的数值,单位V;Uoc为开路电压的数值,单位V。
加入辐照度及温度随时变化的影响因素后,可借助式(5)—式(9)获得新环境下的光伏阵列参数。
式中:Tref为标准条件下的参考温度,单位℃;Sref为标准条件下参考辐照度的数值,单位W/m2;a、b、c为在实际工程中取得的补偿系数。
光伏组件各参数取值如表1 所示。

表1 光伏组件各参数取值表
依据其数学模型,利用Matlab/Simulink 搭建出仿真模型。采用每组4 并2 串5×1 组光伏阵列,光伏电池参数参考1Soltech 1STH-215-P,基本参数为:Im=7.35 A、Um=29 V、Uoc=36.3 V、Isc=7.84 A。
1.2 局部遮荫下光伏电池的输出特性
光伏电池的输出功率-电压、电压-电流特性曲线主要受实际环境中太阳辐照强度(S)和温度(T)这2个因素影响,进而影响光伏电池的最大输出功率点,选取环境条件参数如表2 所示。

表2 局部遮荫条件和正常条件下的参数表
局部遮荫和正常条件下光伏电池的功率-电压特性曲线如图2 所示。
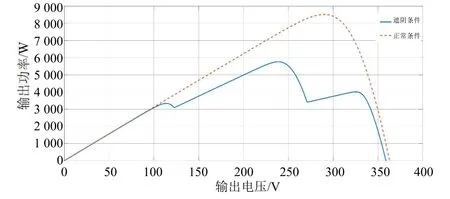
图2 局部遮荫和正常条件下的功率-电压特性曲线图
由图2 可以看出,在正常条件下功率-电压特性输出特性曲线有且只有唯一极值点(290.7 V,8 517 W);在局部遮荫下的功率-电压特性输出特性曲线呈多峰值状态,在局部遮荫条件下功率-电压特性输出曲线有3 个极值点,即(117 V,3 404 W)、(244.3 V,5 871 W)、(332.4 V,4 075 W),其中(244.3 V,5 871 W)为全局最大功率点。
2 光伏电池MPPT(最大功率点追踪)控制方法及分析
2.1 传统电导率增量法
电导率增量(INC)法与扰动观察法不同之处为所检测的物理量和逻辑判别式不同。电导率增量法是利用光伏电池的动态电导率(dI/dU)与静态电导率的相反数(-I/U)对比,以此调节输出电压变化方向的一种方法。
任意时刻光伏电池的输出功率为P=UI,它的两边同时对电压进行求导可得[11]:
若满足dI/dU<-I/U时,判断工作点在MPP 点的右边,此时应当减小输出电压来靠拢MPP 点;若满足dI/dU=-I/U时,判断工作点在MPP 点处,此时应当保持输出电压不变;若满足dI/dU>-I/U时,判断工作点在MPP 点的左边,此时应当增大输出电压来靠拢MPP 点。通过以上判断流程,不断进行电压扰动,直到满足dP/dU=0 时,完成电导率增量法扰动过程。
由式(10)可知,电导率增量法不会盲目地调整工作电压,通过每次检测的数据进行计算,估算MPP点的大概的位置,再进行有针对性的调整。所以,当外界条件变化时,电导率增量法依然能很好地完成最大功率的追踪控制且精度较高。
2.2 自然选择粒子群与电导增量结合算法
基本粒子群优化算法最早由EBERHART 博士和KENNEDY 博士独创,是一种来源于鸟类捕食行为模型的优化计算技术。粒子群优化算法的数学描述为:假设在一个n维搜索空间中,由m个粒子组成的种群,其中第i个粒子位置为xi,其速度为vi。它的个体极值为pi,种群的全局极值为pg。粒子群各粒子在找到上述2 个极值后,就根据下面2 个公式来更新自己的速度v和位置x[12]:
式中:x、v为粒子位置和速度矢量;w为惯性权重因子;c1、c2分别为个体学习因子和社会学习因子;r1、r2为0~1 之间均匀分布的随机数;d为空间维度;pi,j、pg,j为个体极值和全局最优值。
由于基本粒子群算法在迭代后期会出现搜索能力下降,并且容易出现早熟现象。本文采用了自然选择粒子群与电导增量结合算法,其核心思想在于:进行粒子位置迭代更新前会筛选出适应度排在前50%的粒子作为优等粒子,通过优等粒子进行位置更新,其余50%粒子在优等粒子的动态边界范围内随机产生,同时保留粒子群的各个粒子所记忆的历史最优值,自然选择粒子群的各个粒子进行不间断替换进化,能够有效降低陷入早熟的可能性,同时也提升了粒子群的搜寻最优值速度及其优化精度。
在达到最大迭代次数后,因为自然选择粒子群算法能更快地追踪到全局最大功率点附近,此时采用小步长电导率增量法即可完成MPPT 追踪控制,使得结合算法具有可快速、稳定、准确追踪控制的优点。其步骤可总结如下:①初始化基本粒子群的各个粒子的位置(占空比)和速度,并且每个占空比维持一定的采样周期,起到延时作用。②对基本粒子群的每个粒子进行个体最优位置计算即是该粒子历史最优位置,如果各个粒子当前位置的适应度已经更新完成再执行之后的步骤,否则继续更新剩余粒子当前位置的适应度。③对基本粒子群引入自然选择机制,对基本粒子群各粒子按照适应度排序,自动筛选适应度在前50%的粒子作为优等粒子,并将优等粒子中最优位置的粒子传递给gbest;以适应度在前50%的优等粒子数为本体,其余50%粒子在优等粒子的动态边界范围内随机产生。④利用粒子群迭代更新公式来更新粒子群的各个粒子的位置(占空比)和速度。⑤若未达到所预先设定的最大迭代次数时,返回到步骤②继续循环执行;若已达到所预先设定的最大迭代次数时,随后启动电导率增量法来进行全局最大功率点的追踪控制,当达到电导率增量法的结束条件,保存数据,结束结合算法的全过程。结合算法控制流程如图3 所示。

图3 结合算法流程图
2.3 仿真及其结果分析
本仿真基于Matlab2018a 平台搭建。仿真模型选择升压电路(boost)参数选取如下:光伏输出侧并联电容C1=500 μF、升压电路并联电容C2=20.255 μF、串联电感L=8.578 mH、负载电阻Rload=20 Ω。光伏阵列采用每组4 并2 串5×1 组光伏阵列,单光伏组件内参数选取为Im=7.35 A、Um=29 V、Uoc=36.3 V、Isc=7.84 A。分别使用2 种算法分别对光伏阵列进行最大功率点跟踪控制,传统电导率增量法选取较小扰动步长0.000 5;自然选择粒子群与电导增量结合算法的MPPT 算法中,粒子种群规模选取6 个粒子,最大迭代次数3 次,个体和社会学习因子c1、c2分别选取0.4、0.8,惯性权重w取0.3,加入电导率增量法选取较小扰动步长0.000 1。在仿真中,在0.4 s 时,条件发生变化,由局部遮荫条件变为正常条件,其2 种算法的追踪效果如图4 所示。便于分析结果,对2 种算法进行了性能对比分析,如表3 所示。

表3 2 种算法性能表

图4 NSPSO-INC 与INC 追踪效果图
由图4 和表3 可知,对于传统电导率增量法,能够看出在0.024 s 时陷入到第一个局部最大功率点附近且始终无法跳出该局部最大功率点,其功率波动最高可达154 W,追踪精度为56.82%;在0.4 s 时条件变化,虽然电导率增量法在0.426 s 能够最终跟踪到全局最大功率点附近,但其功率波动最高可达66 W 左右,追踪精度为99.71%。对于结合算法在陷入局部最大功率点后很快跳出,在0.146 s 就追踪到遮荫条件下的全局最大功率点,在0.4 s 时条件变化,在0.556 s 就追踪到正常条件下的全局最大功率点;在追踪到全局最大功率点时,追踪精度均为99.98%,功率波动均在1 W 左右,具有追踪精度良好、稳定性较高的特点。
在局部遮荫条件下,结合算法相较于传统电导率增量法的追踪精度提升了43.16%,微震荡;在正常条件下,结合算法相较于传统电导率增量法的追踪精度提升了0.27%,微震荡。由此可见,结合算法在追踪精度和震荡情况方面都明显优于传统电导率增量法,也证实了自然选择粒子群与电导增量结合算法的有效性。
3 结束语
光伏阵列输出功率-电压特性曲线的输出功率在局部遮荫条件下具有多个峰值特性,针对利用传统电导率增量法很容易陷入局部最优解及传统电导率增量方法的跟踪准确性和稳定性差的问题,本文提出了一种自然选择粒子群与电导增量结合算法。由仿真结果分析可知,该结合算法能够有效解决传统电导率增量法容易陷入局部最优解的问题,且在环境变化情况下,依然能够快速、准确、稳定地跟踪到新的全局最大功率点,结合算法具有追踪精度良好和稳定性较高的特点。
