ROV载多波束在海底管线悬跨检测中的应用
2023-10-08刘成龙
沈 星,马 良,郑 剑,王 尚,刘成龙
(1.青岛海洋科技中心,山东 青岛 266100;2.中海辉固地学服务(深圳)有限公司,广东 深圳 518000)
1 引 言
海洋深水油气资源以其高储量、高勘探成功率、高效益而受到各国的重视[1]。因此,深水油气资源的钻探、开采、油田设施的建造和废弃油田设施的拆除等对海洋石油工程技术的发展提出了更多的挑战。海底油气管道经常因腐蚀、海流冲刷、海床运动、人为机械破坏等原因而造成失效,导致海上油气田停产、原油污染海洋环境等一系列问题[2,3]。
上世纪七十年代,基于海军的迫切需要,多波束测深系统在回声测深仪基础上应运而生,带来海底探测技术的一次革新[4,5]。随着全球卫星导航系统(GNSS)技术、水下声学定位技术、电子技术及计算机的发展,各种水下声学设备有了向深水油田设施应用的能力,而水下机器人(ROV及AUV等)技术的发展,更是为各种水下声学设备提供了良好的载体[6]。
2 作业基本流程及工作原理
海上油田设施的工程作业任务执行一般可分为6个阶段,根据任务执行情况选择作业船舶、作业人员及专业设备。作业前,进行软件系统及设备的调试、校准及质控工作;作业结束后,注意数据的处理及完工报告的编撰。ROV载多波束等系统在深水油气管线悬跨及掩埋等检测中的应用,主要涉及船舶定位导航系统、ROV作业系统、多波束声纳剖面仪及数据处理系统等。其中,船舶定位导航系统包含水面定位导航系统及水下定位系统,根据作业需要,ROV可搭载多波束系统及管道追踪系统等。
船舶定位导航系统是整个水下工程作业中最基础的定位导航系统之一。在船舶海洋工程作业中,通常是在船舶的船体上焊接一个可伸缩进入水体的支架,在支架上安装一个换能器(Transducer),在可自由移动的潜水器(如ROV)固定位置安装一个应答器(Responder),用于执行换能器发出的指令,这样就可以获得应答器相对于换能器的相对位置(x2,y2,b)(如图1所示)。通过量取潜水器的高度值c及读取其所安装的高度计(Altimeter)相对固定点的高度h,就可以获得结构物固定点A相对于换能器的相对位置(x2,y2,b+c+h)。换能器相对于天线(Antenna)的相对位置也可通过测量卷尺获得(x1,y1,a)。因此,只要知道天线的绝对位置,就可以计算出水下结构物某一固定点(A点)的绝对位置。
实际作业中,可以通过GPS接收机来获取天线的大地坐标(x,y,z)。假设船首方向为大地坐标的正北方向,船右舷方向为正东方向,A点的绝对位置A(XA,YA,ZA)为:
(1)
3 水面设施系统
3.1 接收机
差分GNSS的基本工作原理主要是依据卫星钟误差、卫星星历误差、电离层延时与对流层延时所具有的时间、空间相关性这一事实,通过已知位置的基准站来测算同时刻、同地域某一接收机GNSS测量误差。在海上石油工程作业中,一般性的米级精度定位系统并不能完全满足定位需求。因此,大多数公司在此基础上,通过不同误差校正、增加差分台站或改进定位接收机等方法,采取付费方式来实现分米级及以内精度的定位,精度可达0.1m(95%的可能性),且工作范围可覆盖全球。
3.2 罗经
水面罗经通常安装在船舶上,使船舶能够满足海洋调查作业及工程作业的基本需求。罗经的主要作用是给船舶及移动平台等提供准确的艏向,根据工作原理的不同,主要分为磁罗经、电罗经及光纤罗经。其中,电罗经的造价相对较低且实际使用过程中优势明显,因此得到广泛应用。在海洋工程作业中,移动船舶(平台)的位移是船舶施工坐标体系中的重要参数,其包含测量点的方位角及测量距离,是目前所有海上工程作业中重要的参数[7]。
3.3 姿态传感器
在海上工程作业中,作业船舶、钻采平台或水下结构单元的运动状态也很受关注。一般情况下,将海面船舶的运动状态分为移动和旋转(姿势和姿态)进行描述,即船舶的左舷右舷方向移动(Sway)、船首船尾方向移动(Surge)、船舶上下深沉(Heave)、船舶纵摇(Pitch)、船舶横摇(Roll)及船舶偏转(Yaw)。船舶的运动及船舶艏向的变化可通过GNSS及罗经获得,而姿态传感器就是获取船舶纵摇及横摇的主要方式。
4 水下设施系统
4.1 超短基线定位系统
目前,水下定位及导航的手段主要是水下声学定位系统,根据定位系统原理,可按基线长短分为超短基线定位系统、短基线定位系统和长基线定位系统3类。其中,长基线定位系统的定位精度与水深无关,而短基线及超短基线定位的精度会随着水深的增加而降低[8]。下面以超短基线(USBL)水下定位系统为例进行简单介绍。
超短基线基阵将水声传感器集成为一个圆柱状换能器(φ=20cm~30cm),便于船舶安装。通常情况下,水声探头中包含3个信号接收传感器单元及1个信号发射传感器单元,并按照固定方位和固定距离(b<30cm)集成在水声探头顶部(如图2所示)。当探头工作时,探头信号发射单元发出一个正弦波脉冲信号,海底声信标Beacon(transponder/Responder)在接收到此脉冲信号后,返回一个不同频率的脉冲信号,集成在探头顶部的传感器会依次接收到此脉冲信号,并记录接收到信号的时间t0及时间差Δt(如图3所示,修改自文献张亚利(1983)[9]、Huibert等(2006)[10])。
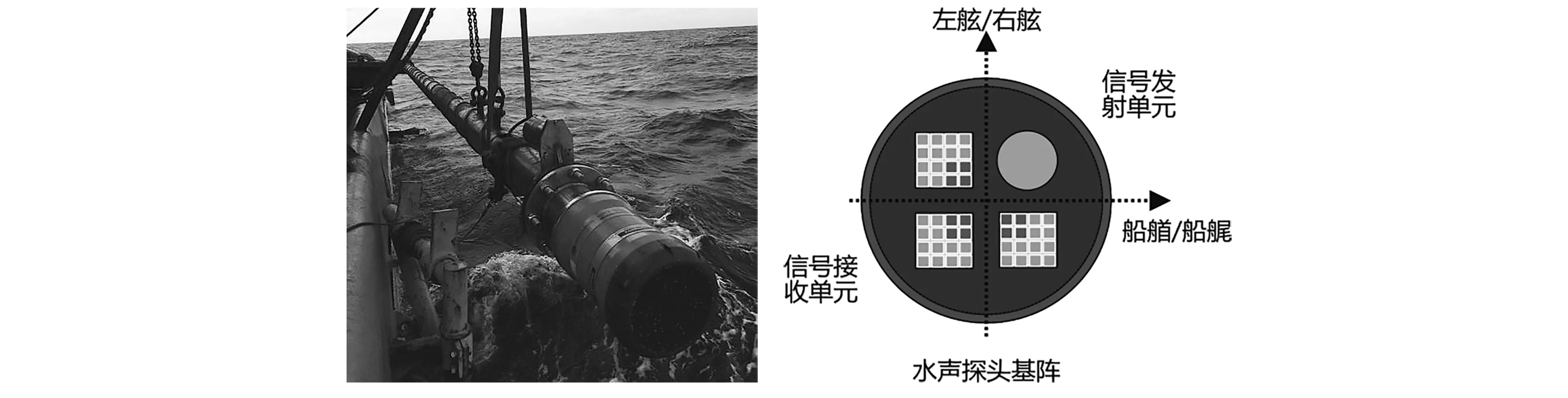
图2 探头安装示意图及顶部结构略图

图3 水下探头收发声信号示意图
因此,某一时刻,水下声信标相对于水声探头接收单元的位置可以表示为:
(2)
其中:
(3)
式(3)中,ν表示声波在水中的传播速度。
在获得信标相对于探头的位置后,再利用姿态传感器对探头的姿态进行校准,最后可通过GNSS得到水下目标(信标)的大地坐标位置。
4.2 ROV作业系统
作业级水下机器人ROV是海洋工程作业的重要载体之一,通过其配备的多功能机械臂、搭载的多种传感器及特种工具,可实现对水下石油设施结构的检查、电缆及油气管道的检测、地形地貌的调查及辅助饱和潜水等作业。ROV与水面船舶相似,为了达到更高精度的作业能力及实现某些特定功能(如导管架清洗、水下切割、管线路由调查等),通常会配备相应的传感器或工具来实现作业需求(如图4所示):水声信号应答器/发射器、深度及高度传感器、姿态传感器、多波束声纳剖面仪、管道追踪系统。
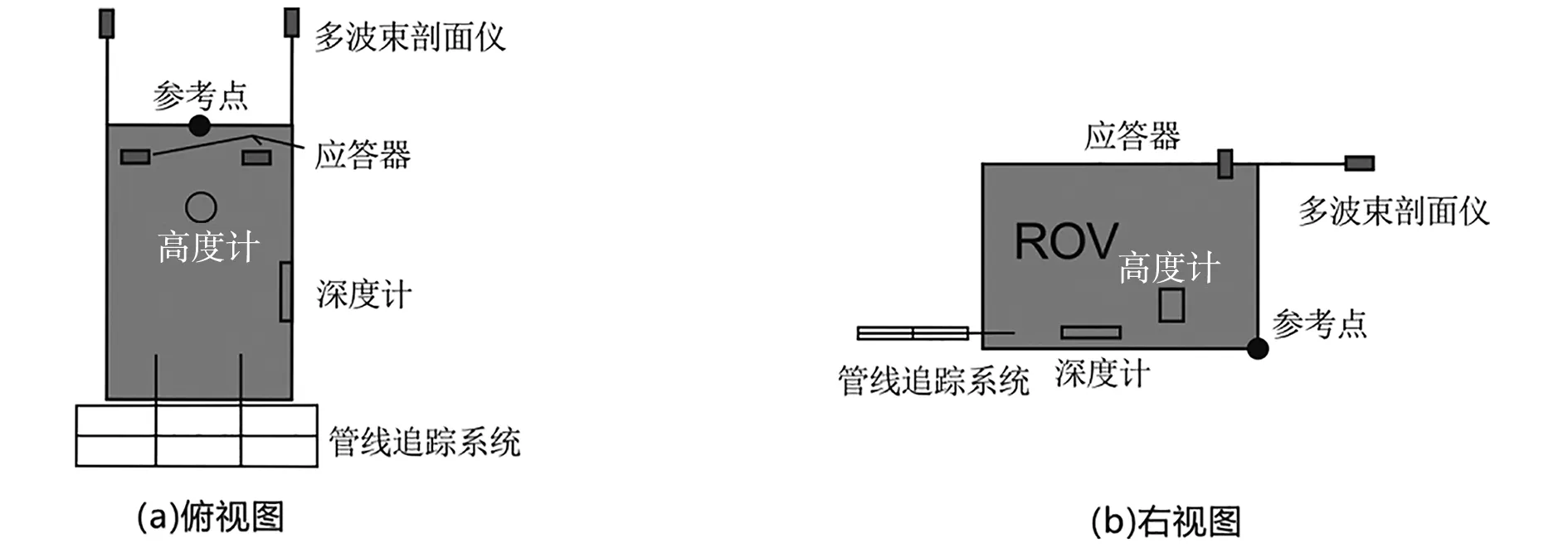
图4 作业级ROV管线检测时搭载的常用传感器示意图
4.3 多波束系统
在解决了ROV水下位置、深度高度及姿态后,要在ROV上安装用于扫描海底地形及管线的多波束声纳剖面仪(MBE Profiling Sonar) 来获取管线的铺设状态。如图5所示, 工程作业中一般配有两个声纳探头,每个探头都具有发射声波及接收反射波的功能,并记录接收到反射波的时间间隔Δtn。声纳探头可在极短的时间内发射几百束声波(Bn),且每束声波有固定的角度(θn)。当Bn波束打到海底表面时(见图5c),可以计算出反射点相对声纳探头的位置:
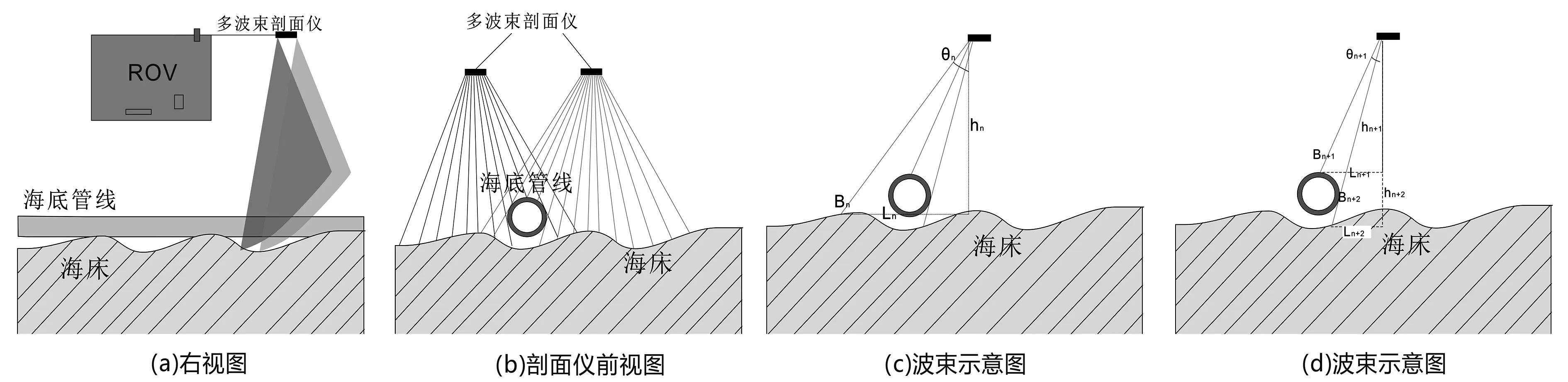
图5 多波束声纳剖面仪工作示意图
(4)
式中,v表示声波在水中的传播速度。
当波束反射点位于管线顶端及侧面时(见图5d),可近似地求出管线的悬跨高度Hp及管线相对声纳探头的位置:
(5)
(6)
其中,Rp表示管线外半径。
根据式(4)可知,当波束垂直打到海底表面,即θn=0o时,可求得此时声纳探头相对海底的高度:
(7)
因此,多波束声纳剖面仪本身也可用来测量其相对海底的高度,在获得水下某一点(移动点或固定点)的位置基础上,通过测量声纳探头相对应答器的位置,再根据式(4)-式(6),就可以得出某一时刻管线及海床某点的绝对位置。
4.4 管道追踪系统
当检测的管道(或电缆等)处于掩埋状态,通过多波束剖面仪及ROV视频系统无法确定管道准确走向,这时就需要配备管道追踪设备(如图6所示)来追踪管线走向。管线追踪设备主要利用电磁感应原理,通过线圈在管道或电缆周围产生感应磁场,磁场的变化产生涡流,通过测量感应涡流的电压值,计算出掩埋管道与线圈之间的距离,得到位置及埋深,即埋深a=TOP-MSBL(其中d和r值可通过传感器获得)。根据工作需要,通过管线追踪系统(Pipe Tracking System)可确定管道具体埋深值及绝对位置。
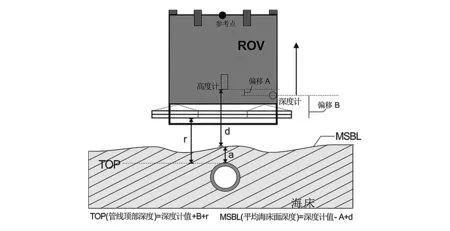
图6 ROV管道掩埋检测示意图(后视图)
上述涉及的传感器或设备均是在实际工作中经常需要配备使用的,根据作业任务及需求的差异,其间还可配备视频监控系统、声呐扫描成像系统、溢油检查系统及惯性导航系统等。
5 数据处理及分析
海上工程作业采集的数据一般包括接收机采集的GNSS数据、罗经数据、姿态数据(Pitch值、Roll值、Heave值等)、温盐深、高度值、三轴加速度值等(主要数据获取途径及流转过程如图7所示)。在这些数据中,部分数据需区分船舶数据和ROV数据。这些数据往往在1s内采集几组或几十组,而多波束等设备往往1s内需采集几十到上百组数据。在数据处理过程中,还需要控制传感器数据的质量,同时需要对校准过的数据进行运算及输出。因此,面对这种大批量数据,如何高效快速地进行数据处理与分析是十分重要的。
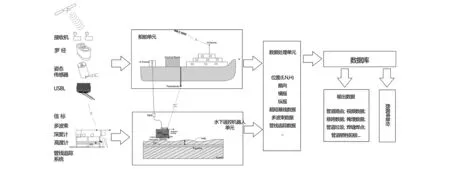
图7 一般工程作业主要数据获取途径及流转过程
数据处理结果直接用于输出雇主需要的数据报告,如管道路由数据、管道悬跨长度及悬跨高度、管线埋深及埋深范围、管道覆盖刚性垃圾或障碍物的三维坐标、管线周围的地形地貌等。因此,需要通过视频采集系统,实时关注现场出现的情况,如鱼群遮挡、水体浑浊以及沙包填埋等,并做好记录。波束数据的处理主要包括噪点的剔除,将高度及深度传感器和姿态传感器采集的原始数据作二次运算后校准至波束数据,删除或挑选重复扫描数据,对少量局部漏检或未扫管线进行可靠插值等。
6 结束语
在海上工程作业时,获取海底结构物等物体的位置方位、水深值等数据至关重要。ROV作为水下结构物外观检查、管线掩埋及管道泄漏检查等工程作业中最重要的载体,更要求获得准确的背景数据信息,为ROV水下工程作业提供有力支撑和保障。通常情况下,在作业母船上配备差分信号接收机、罗经、姿态传感器、水下高精度定位系统(如USBL系统、LBL系统等),在ROV载体上额外配备定位信标、水下罗经、水下姿态仪、高精度深度及高度系统,以提高所获取数据的精度。针对不同的工程作业类型,配备不同需求的传感器或设备,如惯性导航系统、多波束声纳剖面仪、管线追踪系统等。采集数据后,需及时完成数据的基本处理工作,确保数据的质量,保证降低或消除所有可能出现的人为安装或操作引起的误差,提高数据处理结果的质量。
