无铁氧体同步磁阻电机的最大转矩电流比控制
2023-10-08鲁文其张晓斌岑国建
谭 浩,鲁文其,冯 嘉,张晓斌,岑国建
(1.浙江理工大学机械工程学院,浙江 杭州310018;2.杭州汉德质量认证服务有限公司,浙江 杭州310020;3.宁波中大力德智能传动股份有限公司,浙江 宁波 315301)
0 引言
驱动电机作为新能源汽车的核心部件,其类型的选择及驱控技术决定了新能源汽车的调速性能、舒适性和效率[1-2]。数据显示,目前新能源汽车用电机中永磁同步电机占比约为94.7%,异步电机占比约为5%。永磁同步电机具有高效率、高功率密度和高转矩密度的优点,但近年来稀土材料价格不断上涨且波动较大,且由于永磁体的存在,永磁同步电机的性能和控制精度受高温影响较大。因此,不依赖永磁体的磁阻电机成为新的研究热点。同步磁阻电机(synchronous reluctance motor,SynRM)转子上无永磁体,具有制造成本低、体积和质量小、功率密度高的优点,且不存在高温失磁现象[3-5],在新能源汽车用电机中替换永磁同步电机和异步电机具有广阔的市场前景。
SynRM控制方法主要有矢量控制(field oriented control,FOC)和直接转矩控制(direct torque control,DTC)[6-8],其中FOC应用较为广泛。FOC通过坐标变换将交流电机模型简化为类直流电机模型,将定子电流分解为励磁电流和转矩电流分量,并分别独立控制,使交流电机获得像直流电机一样优秀的调速性能[9-11]。常用的FOC方法包括最大转矩电流比控制(maximum torque per ampere,MTPA)、最大转矩变化率控制(maximum rate of change of torque control,MRCTC)、最大功率因数控制(maximum power factor control,MPFC)和感应轴恒电流控制(constant current inductor axis control,CCIAC)等,其中使用最为广泛的是CCIAC和MTPA[12-14]。
SynRM的CCIAC通过在d轴给定恒定电流将其自身等效为IPMSM(interior permanent magnet synchronous motor),其本质与SPMSM(surface permanent magnet synchronous motor)的零d轴电流策略相同。CCIAC原理简单直观,但在实现上对于不同参数、不同工况下的d轴电流如何确定是个难点,一般可通过实验测定法获得最优给定。文献[15]~文献[17]研究了电流超前角和磁链的关系式作为d轴电流给定判断;文献[18]通过CCIAC实现了SynRM恒转矩输出。MTPA策略通过给定转速与反馈转速差值经PI调节得到反馈转矩,通过反馈转矩计算出id、iq目标值。文献[19]实现了SynRM的MTPA策略控制,并对CCIAC与MTPA策略控制效果做了对比实验;文献[20]采用一种考虑磁饱和的MTPA实现了单位电流输出最大转矩的控制目标;文献[21]为实现高精度MTPA控制,将电机参数非线性变化纳入考量,系统介绍了考虑参数非线性变化的多种MTPA控制方法的工作原理,从控制性能、算法复杂程度和计算量等方面归纳总结了不同方法的优劣;文献[22]通过理论仿真和硬件实验,将虚拟双极性方波注入法与现有的虚拟单极性方波注入法进行对比,验证了该方法具有更高的稳态精度,且具有良好的动态性能,能够实现SynRM的高性能MTPA控制。
本文首先对同步磁阻电机FOC中的MTPA控制理论进行推导,其次通过实验法离线获取电机不同工况下电感参数,将得到的电感参数实时传入MTPA控制算法,最后综合设计同步磁阻电机的基于离线电感参数更新的MTPA控制系统,并搭建实验平台进行实验验证。
1 SynRM的数学模型
同步磁阻电机在dq坐标系的电压方程、磁链方程、转矩方程和机械动力学方程分别如式(1)~式(4)所示。
电压方程为
(1)
磁链方程为
(2)
转矩方程为
(3)
机械动力学方程为
(4)
2 SynRM的最大转矩电流比控制
同步磁阻电机MTPA控制方法可以使电机以较小的定子电流获得较大的转矩输出,同时在降低电机损耗的情况下提升电机带载能力。关于同步磁阻电机MTPA控制方法的理论推导如下所述。
设同步磁阻电机定子电流矢量is与d轴间的相位夹角为θ,可得d、q轴电流与is的关系为
(5)
此时,可将式(3)的电磁转矩公式改写为
(6)
由此可得到单位电流的电磁转矩函数为
(7)
电机运行中电流环频率远大于转矩变化频率,因此可以假设此时is不变,对式(7)中电流角θ求偏导后令其值等于0,即
(8)
将式(7)代入式(8)可得
(9)
可解得同步磁阻电机最大转矩电流比控制方法中的电流分配角θ为
将θ值代入式(5),可得d、q轴电流为
(10)
即当id=iq时,电机工作在最大转矩点。
3 基于离线电感参数更新的MTPA控制
矢量控制算法用于永磁同步电机时,对于表贴式永磁同步电机常用零d轴电流控制,电磁转矩只包含永磁转矩无磁阻转矩部分[23-24],因此,d、q轴电感变化不会带来电磁转矩的波动。而对于内置式永磁同步电机,因其凸极率一般较低,故电磁转矩中磁阻占整个电磁转矩比重较小,因此,d、q轴电感变化所带来的磁阻转矩波动对整个电磁转矩的影响很小,可以忽略。而对于同步磁阻电机,因其转子凸极率较大以及其电磁转矩仅由磁阻转矩组成,故电磁转矩受磁路饱和现象引起的电感变化影响较大。因此,要使矢量控制用于同步磁阻电机时取得稳定可靠的控制效果,必须获得电机实时电感参数。文献[24]针对同步磁阻电机磁路饱和所带来的电感变化现象做了大量研究。在电流较小时,电感参数比较恒定,随着电流的增大,电感参数逐渐变小,达到一定程度后趋向于恒定。通过前面的分析,要使矢量控制取得良好的控制效果,准确的电机参数是十分必要的。而同步磁阻电机在d、q轴系下,电感参数与电流的关系非常复杂,这给控制方案的设计带来困难。
为了克服同步磁阻电机运行中电感参数变化带来的精确控制的难点,本文提出一种考虑电感参数变化的矢量控制方法。对样机(参数如表1所示)通过实验方法测定各工况下Ld、Lq,记录变化曲线,生成电感参数离线表,然后用查表法代入同步磁阻电机矢量控制算法中,实现基于离线电感参数更新的同步磁阻电机矢量控制算法。
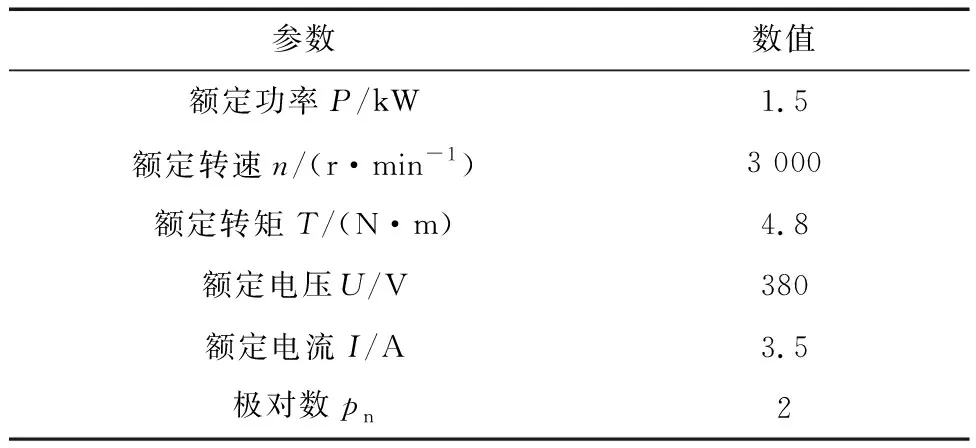
表1 同步磁阻电机参数
实验测得相电流ia与d轴、q轴电感参数对应关系如表2所示。表2中,ia表示母线a相电流值。

表2 相电流与d轴、q轴电感对应关系
对表2数据做线性拟合,得到Ld、Lq变化曲线如图1所示。观察到随着相电流的增大,d轴电感出现先增大再减小,最后趋于不变的趋势;q轴电感随相电流增大而减小,至一定程度后趋于不变。

图1 Ld、Lq变化曲线
将所得电感数据代入式(6)绘制MTPA曲线与理论推导MTPA曲线对比如图2所示。观察到基于离线电感参数更新的MTPA曲线在相电流小于3.5 A时与理论MTPA曲线基本重合,仅在相电流为1.0 A附近时出现偏离,与电感变化曲线(图1)对应可知,此时受d轴电感增大影响;在相电流大于3.5 A时,基于离线电感参数更新的MTPA曲线大幅偏离理论MTPA曲线,即此时id=iq并非最大转矩工作点。

图2 基于离线电感参数更新的MTPA曲线与理论MTPA曲线
本文所设计基于离线电感参数更新的同步磁阻电机最大转矩电流比控制系统原理如图3所示。
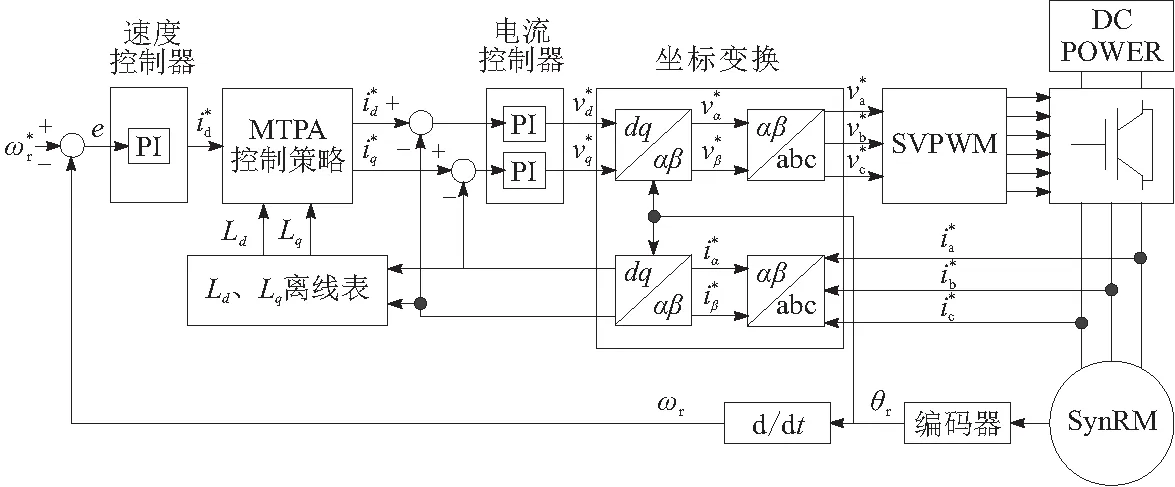
图3 基于离线电感参数更新的同步磁阻电机最大转矩电流比控制系统原理
4 实验测试与分析
4.1 实验平台设计
为了验证本文算法的控制性能,搭建了如图4所示实验平台进行测试,实验平台主要由上位机、驱动器、磁粉离合器、转速转矩功率采集仪、转速转矩传感器和同步磁阻电机(电机参数如表1所示)等组成。
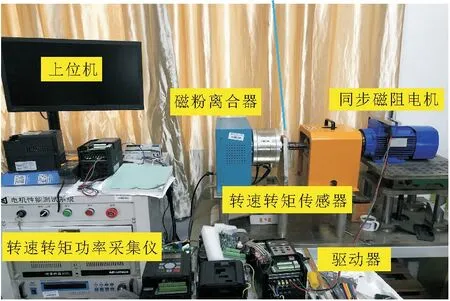
图4 实验测试平台
4.2 启动与稳态性能测试
4.2.1 空载启动
图5为给定转速10 r/min、空载的情况下启动测试得到的实验波形,观察波形可知,电机大约经过0.4 s运行到达给定值并稳态运行,且稳态时电机的实际转速在9.2~10.6 r/min之间变化,稳态误差为8.0%。

图5 给定转速10 r/min、空载的实验波形
图6为给定转速1 500 r/min、空载的情况启动测试得到的实验波形,观察波形可知,电机大约经0.7 s运行到达给定转速值并稳态运行,且稳态时电机的实际转速在1 495.2~1 504.6 r/min之间变化,稳态误差为0.3%。
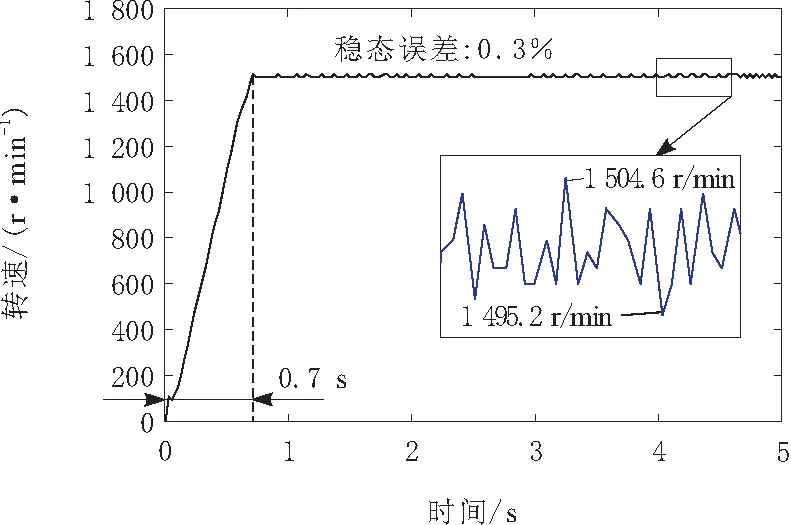
图6 给定转速1 500 r/min、空载的实验波形
图7为给定转速3 000 r/min、空载的情况下启动测试得到的实验波形,观察波形可知,电机大约经1.1 s运行到达给定转速值并稳态运行,且稳态时电机的实际转速在2 997.7~3 005.4 r/min之间变化,稳态误差为0.2%。
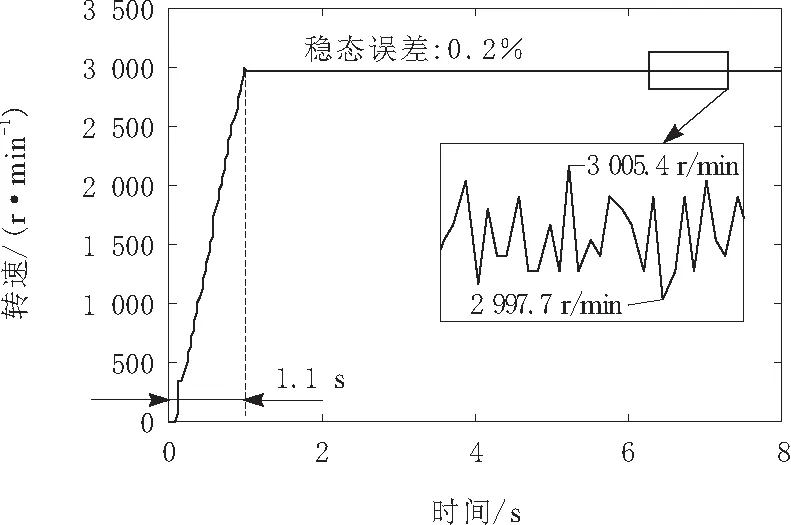
图7 给定转速3 000 r/min、空载的实验波形
综上,采用本文设计的基于离线电感参数更新的最大转矩电流比控制方法在空载且不同的给定转速下,均能保证电机在启动时快速稳定于给定转速,且稳态运行过程中波动较小,具有较高的稳态运行精度。
4.2.2 满载启动
图8为给定转速10 r/min、带载4.8 N·m的情况下启动运行得到的波形,由波形可知,电机大约经0.2 s运行到达给定转速值并稳态运行,且稳态时电机的实际转速在9.2~11.4 r/min之间变化,稳态误差为10.3%。

图8 给定转速10 r/min、带载4.8 N·m实验波形
图9为给定转速1 500 r/min、带载4.8 N·m的情况下启动运行得到的波形,由波形可知,电机大约经0.9 s运行到达给定转速值并稳态运行,且稳态时电机实际转速在1 496.2~1 504.6 r/min之间变化,稳态误差为0.2%。
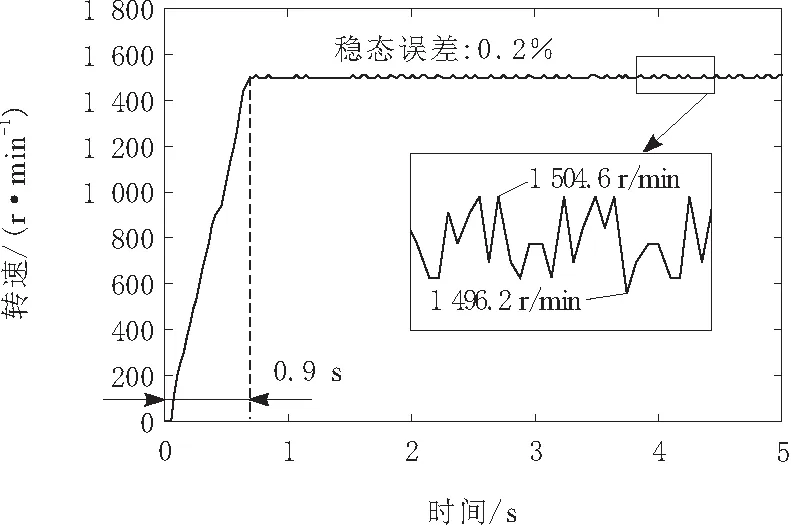
图9 给定转速1 500 r/min、带载4.8 N·m的实验波形
图10为给定转速3 000 r/min、带载4.8 N·m的实验波形,由波形可知,电机经1.0 s到达稳态运行,稳态转速在2999.6~3002.2 r/min之间,稳态误差为0.1%。
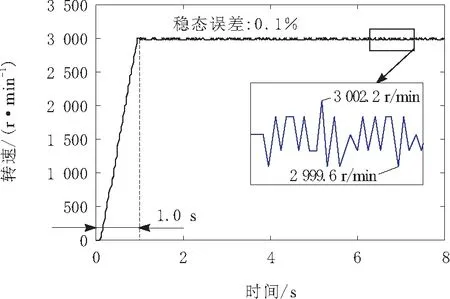
图10 给定转速3 000 r/min、带载4.8 N·m的实验波形
综上,采用本文设计的基于离线电感参数更新的最大转矩电流比控制方法,在满载且不同的给定转速下,均能保证电机在启动时快速到达给定转速,且在电机稳定时转速误差较小,具有较大的启动和带载能力。
4.3 抗负载扰动性能测试
在第3节中论述了同步磁阻电机电感变化对系统性能的影响及电流变化与电感变化之间的关系。而负载的变化会引起电流变化,因此,通过研究负载变化对电机性能的影响来检验控制算法的性能。为了验证本文所设计的基于离线电感参数更新的MTPA算法的抗负载扰动性能,在给定不同转速、且在电机稳态时突加突卸负载4.8 N·m的条件下,进行抗负载扰动性能测试。
图11为给定转速为10 r/min且在电机稳态时突加突卸4.8 N·m负载的实验波形。采用传统MTPA算法控制时,电机转速降至8.2 r/min,0.5 s后到达稳态,然后突卸4.8 N·m负载,电机转速升至15.3 r/min,0.5 s后到达稳态,最大稳态误差为43.0%。采用本文设计基于离线电感参数更新的MTPA算法控制时,电机转速降至7.2 r/min,0.4 s后到达稳态,然后突卸4.8 N·m负载,电机转速升至12.2 r/min,0.4 s后到达稳态,最大稳态误差为28.3%。

图11 给定转速10 r/min、突加突卸4.8 N·m实验波形
图12为给定转速为1 500 r/min且在电机稳态时突加突卸4.8 N·m负载条件下进行实验得到的波形。采用传统MTPA算法控制时,电机的实际转速跌落到1 435.5 r/min,经0.6 s重新到达稳态,然后突卸4.8 N·m负载,电机的实际转速上升到1 543.8 r/min,经0.5 s重新到达稳态,稳态运行中转速的最大稳态误差为4.3%。采用本文设计基于离线电感参数更新的MTPA算法控制时,电机的实际转速跌落到1 486.8 r/min,经0.5 s重新到达稳态,然后突卸4.8 N·m负载,电机的实际转速上升到1 510.3 r/min,经0.5 s重新到达稳态,稳态运行中转速的最大稳态误差为0.9%。

图12 给定转速1 500 r/min、突加突卸4.8 N·m实验波形
图13为给定转速为3 000 r/min且在电机稳态时突加突卸4.8 N·m负载条件下进行实验得到的波形。采用传统MTPA算法控制时,电机的实际转速跌落到2 974.8 r/min,经0.7 s重新到达稳态,然后突卸4.8 N·m负载,电机的实际转速上升到3 029.4 r/min,经0.6 s重新到达稳态,稳态运行中转速的最大稳态误差为0.9%。采用本文设计基于离线电感参数更新的MTPA算法控制时,电机的实际转速跌落到2 983.6 r/min,经0.6 s重新到达稳态,然后突卸4.8 N·m负载,电机的实际转速上升到3 010.4 r/min,经0.5 s重新到达稳态,稳态运行中转速的最大稳态误差为0.5%。

图13 给定转速3 000 r/min、突加突卸4.8 N·m实验波形
综上,采用本文设计的基于离线电感参数更新的最大转矩电流比控制方法,在给定不同转速、且电机稳态运行时突加突卸4.8 N·m负载的条件下,相比较于传统MTPA控制电机转速能够更快恢复稳态,且稳态误差更小。
5 结束语
针对同步磁阻电机控制中因电感变化带来的控制精度问题,设计了基于离线电感参数更新的MTPA算法,并搭建实验平台验证算法。实验结果表明:算法在各典型工况下启动、稳态性能都具有良好表现;基于离线电感参数更新的MTPA算法能够快速响应由负载变化带来的电流变化所引起的电感变化,并及时调整MTPA控制参数,降低控制系统对电机参数的敏感性,提高了系统的动态响应性能、稳定性和可靠性。证明了本文算法的合理性和可行性。