基于深度视觉传感的巡检机器人行进轨迹跟踪控制
2023-10-08郭建仙
郭建仙
(国能神福(石狮)发电有限公司,福建 泉州 362700)
0 引言
随着科学技术的快速发展,智能机器人[1]成为21世纪最受欢迎的科研项目之一。在不同类别属性、不同工作领域的众多智能机器人中,巡检机器人作为调试范围不受限的工业型机器人,因具备较为优越的复杂环境适应能力,常被应用于各种轨迹跟踪任务中。不同于其他机器人对平衡中心点线的依赖性,巡检机器人采用双轮支撑质心。由于双轮对前馈-反馈滚动趋势具有较为精准的预测性,因此,巡检机器人面对不同路况能够做出较其他类型机器人更为迅速、敏捷的反应。但这种反应速度产生的时间差使巡检机器人在运行过程中轨迹跟踪控制容易产生误差,这成为巡检机器人的研究难点。
张磊等[2]通过变增益自抗扰控制器,实现机器人轨迹跟踪控制;张婷婷等[3]提出欠驱动搬运机器人轨迹跟踪控制技术;贾松敏等[4]通过反步控制技术,从横向、纵向2个方向控制机器人闭环系统、补偿机器人打滑扰动,实现机器人轨迹跟踪控制。上述3种方法未考虑实际巡检环境中的地形条件,在存在障碍物的环境中跟踪控制效果较差。
为了解决上述方法中存在的问题,提出基于深度视觉的巡检机器人行进轨迹跟踪控制方法。
1 巡检机器人运动学方程
巡检机器人的电机部分并不统一组装,即应用于不同领域的巡检机器人在电机装配方面存在较大差异。但无论装配哪种电机,巡检机器人的移动位姿和轴向运动轨迹产生的角速度和线速度在综合情况上均大致相同。因此,想要获取巡检机器人运动学方程,应忽略电机类型,转而以地面坐标系为参考坐标,以巡检机器人所处位点为中心点,分别计算机器人行进方向在X轴、Y轴的夹角,确定机器人当前移动位姿,并将轴向运动轨迹产生的角速度、线速度与巡检机器人移动位姿结合。机器人行进方向在X轴、Y轴夹角T和U的计算公式为[5]
(1)
g为巡检机器人中心点;α为巡检机器人两轮间的速度差;v为X轴行进的理想角速度;δ为中心点与X轴的夹角;y为修正偏差;h为车轮半径;ϖ为Y轴运动轨迹理想线速度;f为Y轴运动轨迹理想角速度;θ为中心点与Y轴的夹角。
巡检机器人移动位姿的描述公式为
(2)

机器人实际角速度R和线速度C的计算公式为
(3)
∂为巡检机器人的几何中心;ι为双轮驱动力;u为双轮滑动阻力;k为巡检机器人实际位姿;χ为X轴方向的航向角;λ为Y轴方向的航向角;z为任务空间与地面的垂直高度;p为坐标变换维数。
巡检机器人运动学方程的表达式为
(4)
Δj为任务空间速度向量;η为空间位移;γ为滑动模态。由此完成巡检机器人行进轨迹跟踪控制的运动学模型。但以上模型未考虑实际巡检路况中的障碍物,获得的轨迹控制结果为理想值,实际应用中存在一定偏差。因此,需要利用深度视觉技术和滑模器解决轨迹控制误差问题。
2 巡检机器人行进轨迹跟踪控制
2.1 地图创建
Kinect深度视觉传感器是建立在环境感知设备基础上的自动化信息采集装置,该装置能够通过释放红外散射激光扫描场景内的全部信息,并根据扫描获取的RGB彩色信息和深度信息[6]构建与实际环境贴合度较高的三维地图。将Kinect深度视觉传感器与巡检机器人搭配在一起,Kinect深度视觉传感器可以为巡检机器人提供虚拟地图,指导巡检机器人前往目标任务点,避免与巡检环境中的障碍物发生碰撞。
Kinect深度视觉传感器创建虚拟地图的具体过程为:首先启动电机底座的CCD相机[7]扫描巡检机器人所处环境的深度图像,然后根据扫描获取的RGB彩色信息和深度信息建立场景深度模型。考虑到巡检机器人对具体测距的高精要求,Kinect深度视觉传感器在建立场景深度模型时,要时刻注意每个像素点是否满足像素均值对应的深度值。提取场景深度模型特征点并将特征点匹配到三维坐标系中,即可自动创建巡检机器人所处环境的虚拟地图。深度图像采集公式为
(5)

像素均值对应深度值的计算公式为
J=-κsgn(s1)-s2
(6)
κ为图像中顶点两两距离的均值;s1为图像采集信息与预测深度信息间的对应关系;s2为深度值不确信度。
场景深度模型的表达式为
D=2ρsinφ(ξ+qijtan ϑ)
(7)
ρ为环境信息丰富度;φ为模型视野范围;ξ为模型与实际场景的贴合度;qij为点i和点j的深度视觉射线距离;ϑ为模型权重。
场景深度模型特征点提取公式为
X=e1p1+e2p2+ψp3
(8)
e1为三维点云模拟数据;p1为特征点成像原理;e2为特征点倾斜因子;p2为互不相交的特征点融合度;ψ为特征点在X轴上的物理尺寸;p3为特征点在Y轴上的物理尺寸。
特征点匹配公式为
(9)
l为初始化地图栅格单元;ζ为先验地图面积;I为几何转换率;ε为交叉匹配出现错误的概率。由此完成巡检环境虚拟地图的构建,为跟踪控制奠定基础。
2.2 跟踪控制
滑模控制器[8]是遵循动态补偿原理的电动执行器,在反馈控制动态目标上具有精准度高和浮动偏差低等特点。由Kinect深度视觉传感器创建的虚拟地图在给定巡检机器人示教路线后,滑模控制器通过高速视觉反馈和位置动态补偿的方法,自动判断巡检机器人运动学方程中实际轨迹与期望轨迹存在的偏差,并在偏差演变为矢量误差前离线编程巡检机器人制动区间,使原本粗糙的巡检机器人轨迹转趋于平滑,实现巡检机器人轨迹自动化跟踪控制。
巡检机器人制动区间编程平滑曲线公式为
(10)

滑模控制器的位置动态补偿表达式为
M=σν+G
(11)
σ为补偿执行器的活动范围;ν为PD控制率;G为误差收敛的速度。
将式(11)的动态补偿结果输入到滑模器的制动区间编程中,消除行进轨迹跟踪控制偏差。
3 实验与结果
为了验证基于深度视觉的巡检机器人行进轨迹跟踪控制的整体有效性,需要对其测试。
随机选择2款不同型号的巡检机器人作为验证算法行进轨迹跟踪控制性能的实验对象,如图1所示。

图1 实验对象
实验对象相关参数如表1所示。

表1 实验对象相关参数
使用Kinect深度视觉传感器获取的信息如图2所示。

图2 Kinect深度视觉传感器获取的信息
将传感器输入到滑模器中进行位置动态补偿。为了体现本文方法可以不受实际巡检环境障碍物的影响,设置非障碍物环境和障碍环境2种测试环境,如图3所示。
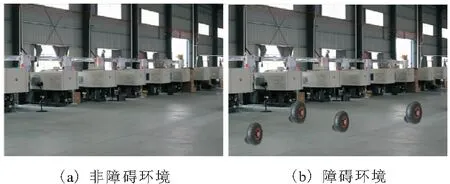
图3 障碍环境设置
3.1 非障碍物环境
将实验对象置于非障碍环境,分别采用本文方法、文献[2]方法和文献[3]方法跟踪控制实验对象行进轨迹,通过对比不同方法的控制结果,判断不同方法对巡检机器人行进轨迹的跟踪控制性能。不同方法的控制结果如图4所示。
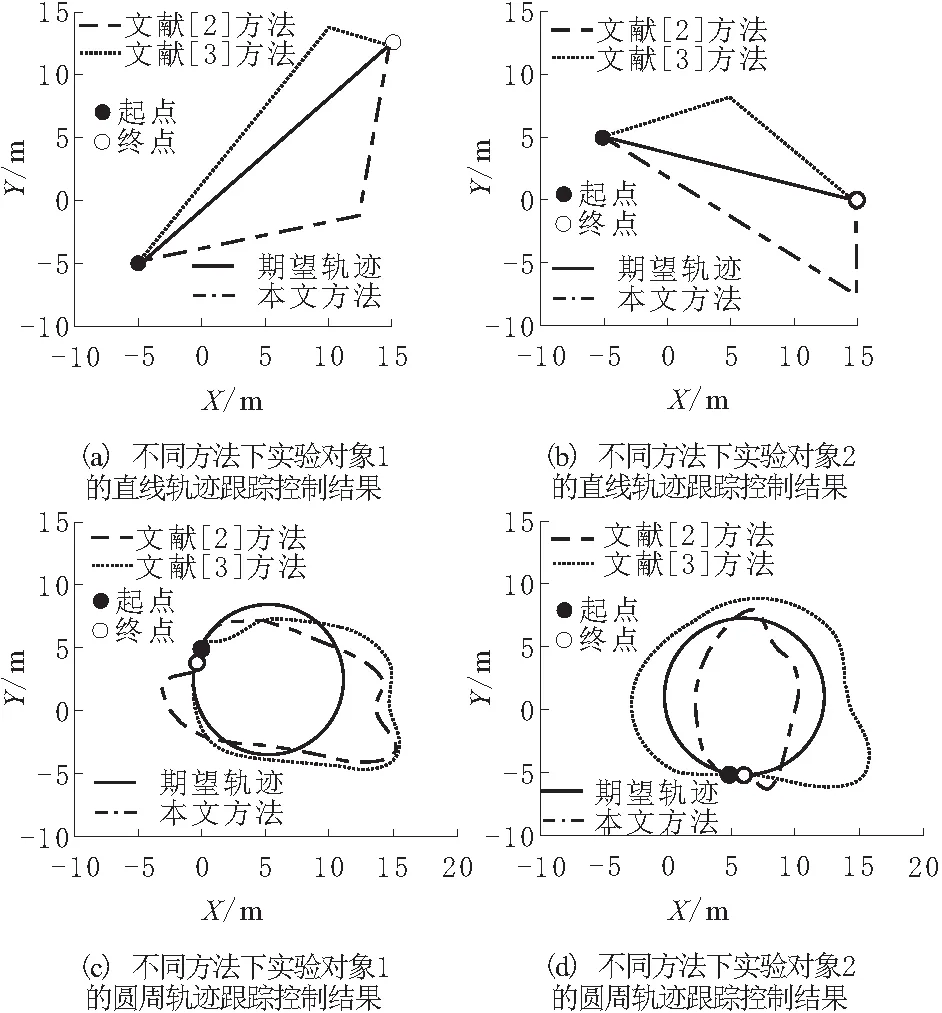
图4 不同方法的控制结果
由图4可知,采用本文方法跟踪控制巡检机器人行进轨迹,其在直线、圆周2种轨迹模式中的跟踪控制结果均与期望轨迹重合,说明本文方法的跟踪控制效果较好。因为本文方法在跟踪控制巡检机器人轨迹前,优先利用Kinect深度视觉传感器创建贴合实际环境的虚拟地图,并以此为基础,为巡检机器人提供轨迹跟踪控制的最优方案。采用文献[2]方法和文献[3]方法跟踪控制巡检机器人轨迹,二者在直线、圆周2种轨迹模式中的跟踪控制效果均与期望轨迹存在较大偏差,说明文献[2]方法和文献[3]方法的跟踪控制效果较差。经上述对比可知,本文方法的跟踪控制效果明显优于传统方法。
3.2 障碍物环境
将实验对象置于障碍环境,分别采用本文方法、文献[3]方法和文献[4]方法跟踪控制实验对象轨迹,通过对比不同方法的控制结果,判断不同方法对巡检机器人行进轨迹的跟踪控制性能。不同方法的控制结果如图5所示。

图5 不同方法的控制结果
由图5可知,本文方法在障碍物环境中仍与期望轨迹保持较高的重合率,而文献[3]方法和文献[4]方法在障碍物环境中极易与障碍物碰撞导致巡检机器人无法到达终点位置。经上述对比,进一步验证了本文方法的实用性。
4 结束语
近年来,巡检机器人轨迹跟踪控制技术已成为焊接、打磨和喷漆等机械制造领域不可或缺的重要技术。国内外学者为了减少工业制造损失和运行间隙误差,均投身到巡检机器人轨迹跟踪控制方法的研究之中。本文提出的基于深度视觉的巡检机器人行进轨迹跟踪控制经过测试在障碍物环境和非障碍物环境的跟踪控制效果均较好,能够消除机械制造领域的安全隐患。