三维激光扫描仪自由设站法在施工期水工隧洞变形监测中的应用
2023-10-07许烨璋符蓓蕾屠铁威丁国章
许烨璋,张 炜,符蓓蕾,屠铁威,丁国章
(1.浙江省水利河口研究院(浙江省海洋规划设计研究院) ,浙江 杭州 310017;2.浙江省水利防灾减灾重点实验室,浙江 杭州 310017;3.绍兴市曹娥江流域中心,浙江 绍兴 312099)
0 引 言
隧道施工期间,周围地质情况的复杂性以及施工过程中岩土力学行为不断变化等因素会对隧道结构产生综合影响,从而使隧道发生变形。因此,隧道的变形监测是隧道施工安全控制的重要环节[1]。隧道外部变形是其内在受力的外部表现,常规单点的监测方法无法全面描述监测物体的表面信息[2-4]。采用摄影测量方法获取监测物体的三维模型,其图像采集精度受观测条件影响较大,后期处理繁琐且稳定性不高[5-6]。传统的洞室、隧道变形监测方法是:开挖期间,在墙体内部预埋收敛计、位移计等传感器以及巴赛特收敛系统[7]、光纤Bragg光栅传感技术[8-9]等,其局限性在于预埋的传感器只能监测每隔一定距离的特定部位断面的几何信息,而无法进行整体变形量监测以及三维可视化。
三维激光扫描技术能够快速获取被测物体表面大量的、连续的、密集的点云数据,能够全面地反映被测物体的几何外形信息[10-11]。近年来三维激光扫描技术不断被运用到各类工程的变形监测中,取得了良好的应用效果[12-14]。
文章介绍了在浙江省某抽水蓄能电站的水工隧洞在掘进施工过程中采用三维激光扫描仪自由设站法用于隧洞变形监测的方法。
1 方案设计
1.1 扫描仪器
本次隧洞三维激光扫测采用德国Z+F Imager 5016相位式三维激光扫描仪,其主要参数见表1。

表1 Z+F Imager 5016三维激光扫描仪主要参数
1.2 公共点布设
为进一步针对性地监测隧洞在施工期间的变形情况,选择隧洞内20 m长的一段距离进行扫描试验,在隧洞顶部4个角落里布设固定不动的扫描靶球作为公共基准点,见图1。4个公共基准点的作用主要有2个,一是给每一期扫描的各测站点云提供公共配准点,二是给前后用作变形分析的二期点云数据提供变形分析的基准点。
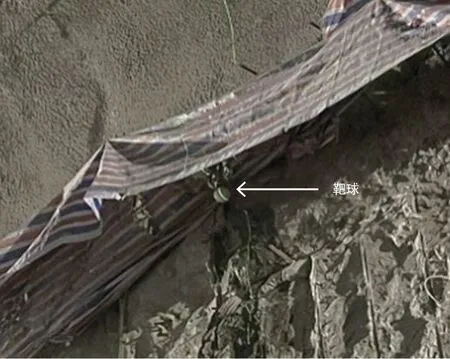
图1 现场靶球图(公共点)
1.3 自由设站实现
选取隧道中轴线断面里程距50~70 m段作为本次变形监测研究段,在该段范围上沿着隧洞的中轴线均匀布设3站扫描位置,每站的位置大致位于20 m长中轴线的等分点上,且每站扫描位置都能够扫测到4个靶球。扫描仪每次只需要架设在3个等分点附近位置处即可实现对该断隧道的自由设站式扫描,设站位置布设见图2。

图2 隧洞扫描设站示意图
每站扫描时均将扫描仪扫描参数设置为最高精度和最高分辨率模式,目的是采集到分辨率和精度都最高的隧洞点云数据以便于后期变形分析和建模处理。扫描作业现场见图3 a)和3 b)。

图3 扫描作业现场图
2 点云数据处理
2.1 点云配准原理
点云数据配准的目的是将每期扫测的3站点云数据以及二期扫描的点云数据转换到同一个坐标系统下,由于二期扫描的3个测站都同时扫测到了布设在隧道顶部的4个靶球,因此4个靶球球心点可以作为每期各个测站之间和二期之间点云数据坐标转换参数计算的公共点。公共点计算坐标转换参数完成点云数据配准按照公式(1)进行。
式中:(X,Y,Z)为转换后坐标;(x,y,z)为转换前坐标;μ为尺度因子;α、β、γ分别为x、y、z三个坐标轴方向上的旋转角度;(x0,y0,z0)为3个平移参数。
2.2 点云配准实施
具体流程为先将第一期第2和第3站点云数据配准到第一期第1站点云坐标系中形成第一期隧洞整体点云数据,然后对第二期隧洞3站点云数据作相同操作。靶球点云处理采用天宝Realworks软件,通过球面点云数据拟合计算出球心的空间三维坐标,靶球拟合效果见图4,隧洞扫测第一期3站点云数据配准好后整体点云见图5,点云配准数学精度见表2。
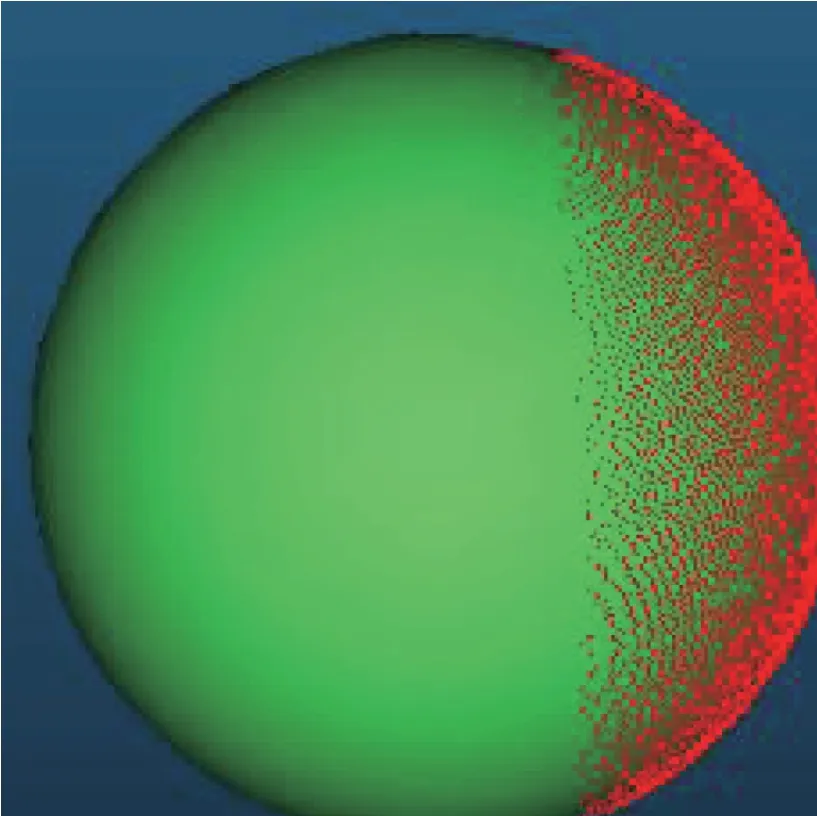
图4 靶球拟合效果图

图5 隧洞第一期3站点云配准后整体点云数据图

表2 点云配准数学精度表
2.3 二期点云数据建模
将完成配准后的二期隧洞点云数据利用天宝Realworks软件进行三维建模处理,具体采用点云数据建模功能模块。首先选择一期隧洞点云数据,软件会根据点云数据采用三角网法自动构建隧洞表面三维模型,二期点云建模结果见图6~7。

图6 隧洞第一期点云建模效果图(中间黄色连续区域)
图7 隧洞第二期点云建模效果图(中间蓝色连续区域)
为了直观地显示建模的精度和效果,将每期点云数据建好的模型和参与对应的三维点云数据叠加在一起显示,见图8~9,其中红色离散点代表扫测点云数据,黄色及蓝色连续区域代表对应点云所建模型。

图8 隧洞第一期点云数据与模型叠加效果图
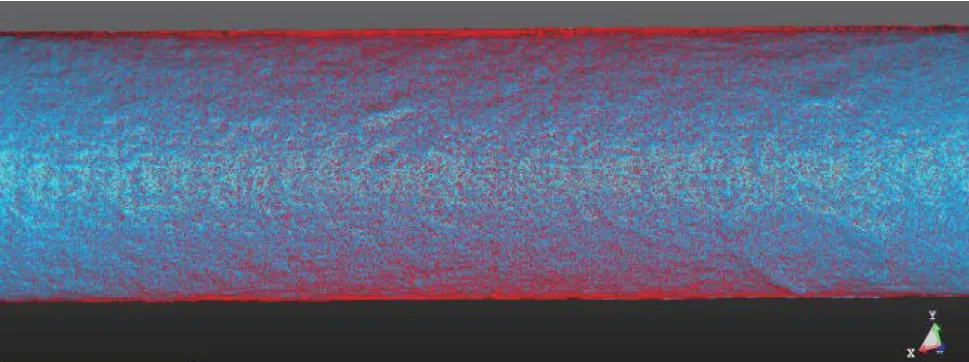
图9 隧洞第二期点云数据与模型叠加效果图
2.4 基于三维模型的变形分析
采用天宝Realworks软件的监测/检测图分析工具对二期拱顶模型进行叠置分析以显示及提取洞室的三维整体变形量,根据变形值进行赋色渲染,二期三维模型叠置分析变形显示效果见图10。
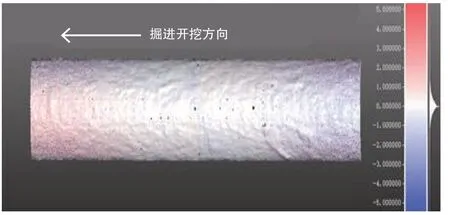
图10 隧洞二期三维模型叠置分析变形图
由图10可知,颜色偏红也即变形量值大的变形点多集中在靠近隧洞掘进开挖方向的一侧,其变形数值最大约为5 mm,由于隧洞在掘进施工中多采用爆破方式,爆破产生的震动会给整个隧洞带来一定影响,因此变形的结果也与施工情况相符合。
利用软件的查询工具可以查询显示指定位置处的变形信息,包括变形点的变形数值,变形值在三维坐标系中的变形分量等。变形信息查询显示效果见图11。
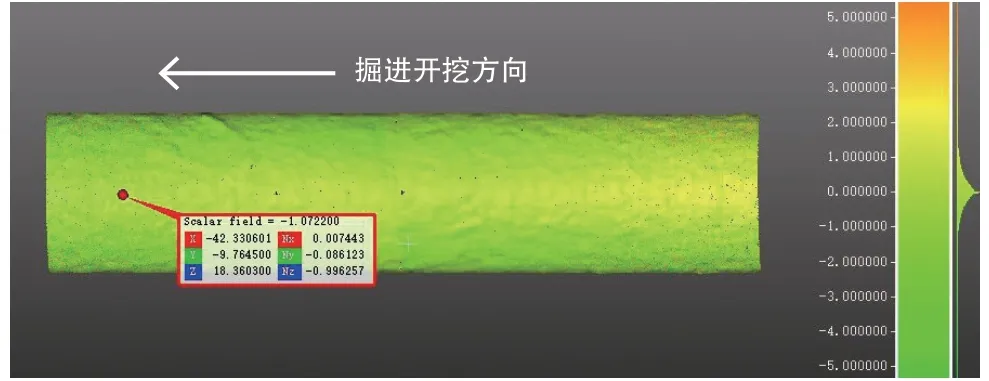
图11 三维变形信息查询图
3 结 论
本文采用德国Z+F Imager 5016三维激光扫描仪分两期扫描了处于掘进施工中的水工隧洞,通过自由设站法采集二期点云数据,采用Realworks软件实现了基于三维模型的变形分析及显示,得到以下主要结论:
1)三维激光扫描仪自由设站法具备灵活高效且无需建造固定观测墩的优点,十分适用于工况环境复杂多变的监测环境,因此该方法具备一定的推广性。
2)水工隧洞等大型地下工程在施工过程中需要高频率地了解其变形状况,三维激光扫描技术以其自动化程度高,配套软件功能齐全等优势十分适用于此类地下工程的变形监测。
3)三维激光点云数据不仅可以用于变形监测,还可以将三维点云数据与工程设计参数进行对比分析,计算出施工与设计的偏差情况。
