智能无人车辆混合储能系统选配与参数优化
2023-10-07何强刘后刚邹波吕布陈续麟段昱
何强, 刘后刚, 邹波, 吕布, 陈续麟, 段昱
(重庆铁马工业集团有限公司, 重庆 400050)
0 引言
伴随装备技术的不断革新和强烈的军事需要,智能无人车辆快速发展,其装载的储能系统被寄予具有高功率特性以满足急加速与再生制动的需求,同时具有高能量特性以满足长续航的要求[1]。然而,车辆的动态性能需求与电池储能技术的矛盾阻碍了整体性能的进一步提升。受限于目前的电池材料水平,尽管电池技术发展迅猛,现有电池储能系统依然不能完全满足整车的性能要求,特别是智能无人车辆多样化的用电载荷与极限工况的大功率充放电需求,对储能系统的供电性能提出了更高的挑战[2-4]。为了解决这个问题,将动力电池与具有高功率密度的超级电容器相结合的混合储能系统(HESS)受到广泛关注,被认为是最佳方案之一,其兼有较高的比功率与比能量,可以有效提升储能系统的功率输出能力,更好地满足车辆瞬时启动、加速、爬坡等大功率需求[5-6]。然而,两种类型的能源元件也意味着更多的组合结构及可调参数,直接影响着系统的动力性、经济性和使用寿命等特性。因此,研究HESS的结构选型与参数优化,对充分发挥两种储能元件的优势和提升整车性能有着重要意义。
为了最大程度地发挥HESS的效能,很多学者进行了研究,主要集中在系统参数辨识与估计、结构设计与优化、配电与能量管理策略等方面,取得了丰硕的成果[7]。其中,系统的拓扑结构设计及优化对HESS性能有很大影响,不仅直接关系着系统的成本与能耗,还决定了系统的基本性能以及后续优化的可提升性[2],因此被学者广泛研究。
一方面,一些学者基于整车的性能需求对HESS配置进行分析优化。文献[8]针对电动汽车复杂路况的功率需求,设计了基于双向DC/DC能量调节器的HESS结构,并提出了通过控制DC/DC输出值来实现系统功率分配的控制策略,测试结果验证了方案的有效性。文献[9]基于城市道路工况数据,利用整车能量和功率两方面的需求对动力电池与超级电容进行参数匹配,并针对充放电电流过大等问题制定了能量控制策略,测试结果验证了HESS的优势:可以提高车辆的动力性、减小大电流对动力电池的冲击等。文献[10]基于储能系统典型功率需求等数据,以最小化年度运行成本为目标,优化得到HESS的最佳配置,包括系统的最大功率及动力电池与超级电容的最大功率和容量,与单一电池储能系统相比,优化得到的HESS使系统的经济性提高了37.8%。文献[11]针对动力电池在大负荷工况频繁充放电时导致效率下降等问题,以车辆动力性、续驶里程等为约束条件,以提升整车经济性为主要目标,对HESS进行参数匹配,并设计了能量控制策略,通过仿真验证了可行性。文献[12]根据多种典型循环工况的功率需求及能量需求,以电池容量和超级电容容量为优化对象,以HESS的质量和成本为目标函数,得到了不同加权系数下系统的最佳参数匹配方案。文献[13]根据选定的电池、电容型号,以车辆最短续驶里程及循环工况中连续最高功率需求等为约束条件,匹配优化了HESS储能元件单体参数。另外,为了分析系统相关参数对HESS的影响,文献[1]选择行驶里程、拓扑结构、总线电压等8个参数进行了系统最优尺寸与成本的敏感性分析,发现行驶里程对HESS成本的影响最大,为混合系统的参数设计提供了有益参考。
另一方面,针对HESS参数配置与系统的质量、成本、电池寿命等多个因素的关联关系,一些学者利用多种算法进行参数优化,以获得最佳结果。文献[14]提出一种多目标优化方法,同时将HESS的质量、成本、电池健康状态等作为优化目标,将整车最高速度、续驶里程、加速时间等作为约束条件,以获得混合系统动力电池与超级电容单体最佳数量。文献[15]针对插电式电动汽车HESS的配置进行多目标优化,以最大限度地降低系统成本、质量和体积,并尽可能延长电池使用寿命,仿真结果表明优化后的混合系统经济性与质量都更优。文献[16]针对HESS参数配置提出了一种基于DIRECT(DIviding RECTangles)算法的多目标优化方法,以减轻HESS的质量、延长电池的使用寿命,仿真结果表明在城市工况中优化后的HESS能显著延长蓄电池使用寿命。文献[17]开发了一种多目标混合优化算法,对HESS的尺寸与功率分配进行了优化,结果显示HESS在质量、电池寿命等方面可以得到最佳结果。文献[18]针对铲运机负载变化剧烈的特点,提出了一种基于动态规划算法和帕累托最优解集的多目标优化方法,解决了HESS的参数优化和能量管理策略优化问题。文献[19]以全寿命行驶里程和折算百公里成本为双重优化目标,并运用NSGA-II算法对HESS的配置参数与功率分配参数开展联合优化,在各目标性能之间取得了合理的平衡。另外,文献[20-21]也采用粒子群优化算法等对HESS参数进行相关优化,取得了一定成果。
HESS拓扑结构对于整车性能的提升有着重要意义,然而目前的研究主要集中于HESS的能量管理与状态估计等方面,对HESS的结构选型与参数匹配进行的优化较少,且现有优化方案较为复杂,可能陷入局部最优解。
为了尽可能消除智能无人车辆动态性能与储能技术的矛盾,本文提出一种HESS快速选型与匹配优化方法,主要贡献如下:1)针对智能无人车辆对HESS的基本要求及其运行特性,综合对比系统拓扑结构及能源元件,选配最优系统构型;2)基于车辆动力性、静音续驶里程等约束条件,以轻量化为目标对系统储能元件参数进行匹配优化,实现HESS输入输出能力与系统质量的平衡,从而提高车辆综合性能。
1 HESS拓扑结构及储能元件选型
随着新能源电机、电控等技术的不断发展,电传动系统逐步应用于智能无人车辆,一方面提升了车辆的综合性能,另一方面也对车辆储能系统的设计带来了挑战;同时,面对智能无人车辆搭载的各种武器系统、信息系统等用电需求,对车载储能系统提出了更高的要求,主要包括:
1)具有高比能量与比功率,以满足智能无人车辆续航、加速、载荷用电等需求。
2)工作温度范围宽,以保证智能无人车辆在恶劣环境条件下正常使用。
3)充放电效率高、自放电率低,以降低系统损耗,提升综合性能。
4)安全可靠、寿命长、成本低等,以降低车辆生产与后期维护成本。
面对采用电传动构型的智能无人车辆对储能系统的要求,本文结合储能技术现状,选择HESS作为车载储能系统,并选取具有高能量密度的动力电池与高功率密度的超级电容作为HESS的基本元件[22],以提升车辆综合性能。
1.1 HESS拓扑结构对比
目前,HESS的构型研究主要集中在三类:主动式构型、被动式构型及半主动式构型,其中半主动式构型又可分为动力电池主动式构型与超级电容主动式构型,如图1所示。

图1 HESS典型构型
其中,被动式构型如图1(a)所示,此时超级电容组相当于滤波器,仅当动力电池组电压发生较大变化时,其可以减小电池组电流波动[23]。该构型结构简单,但各分系统的功率不能主动控制,同时超级电容的作用受到限制,不能充分发挥其功率密度高的优势。
动力电池半主动式构型如图1(b)所示,动力电池组与双向直流转直流(DC/DC)变换器连接,因此该结构易于对动力电池组的充放电电流进行控制,以延长动力电池寿命。但其工作时易使负载端电压产生较大变化,影响电压的稳定性,提高了对负载设备性能的要求。另外,一般电池作为主能量源,能量频繁经过变换器,会增加系统的能量损耗[24]。
超级电容半主动式构型如图1(c)所示,超级电容组先与DC/DC变换器连接再与动力电池组并联,可以充分发挥超级电容的优势,承担瞬时大电流充放电工作,保护动力电池组。同时,由于动力电池组的端电压特性较硬,对负载设备性能要求较低,且动力电池组端没有连接DC/DC变换器,因此充放电效率较高。但由于超级电容主要承担瞬时功率输入输出,则该构型对于DC/DC变换器的响应速度有较高要求[1]。
主动式构型如图1(d)所示,动力电池组与超级电容组分别通过一个DC/DC变换器与负载连接,使得负载电压较为稳定,降低了对驱动系统及用电负载的性能要求;同时可利用DC/DC分别对动力电池组与超级电容组进行控制,实现能量的最优分配。但该连接方式结构复杂,两个DC/DC变换器不仅增加了系统的损耗,而且混合系统的控制难度、体积、质量与成本等都相应增加[22]。
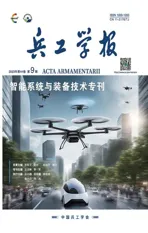
综上分析,4种拓扑结构的对比如表1所示,考虑无人车辆对储能系统高效率的要求、其激烈的行驶工况对瞬时充放的需求及用电负载设备对电压稳定性的要求,最终选择超级电容半主动式构型为基本构型。相比被动式构型,其不仅可以充分发挥超级电容的优势,延长电池使用寿命,还降低了对电机驱动系统的性能要求;相比主动式构型,其质量、成本、控制难度、系统损耗都有优势;相比于电池半主动构型,其具有母线电压稳定性更好等优势。
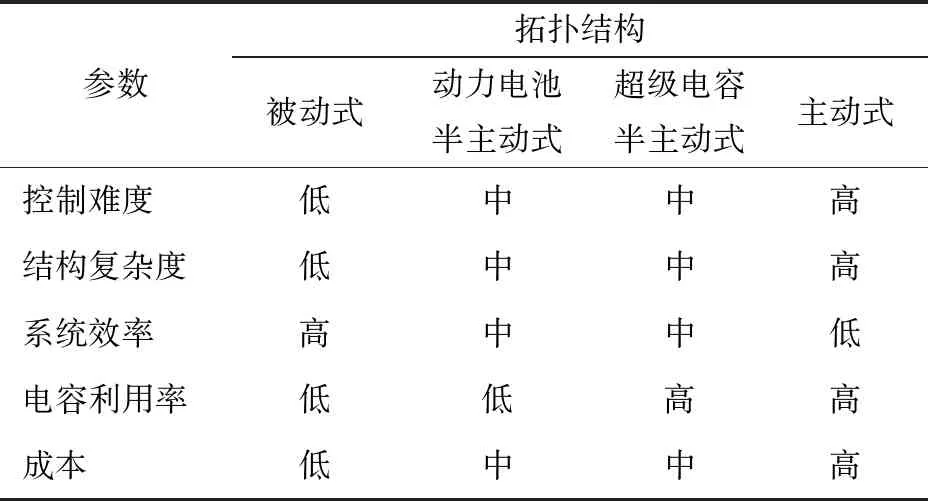
表1 典型拓扑结构对比
1.2 HESS关键部件分析
1.2.1 动力电池分析
目前应用于车载动力电池的种类主要包括铅酸电池、镍氢电池、锂离子电池等,3种电池性能对比如表2所示。相比于铅酸动力电池、镍氢动力电池,锂离子动力电池具有高比能量、高比功率、循环寿命长等优点,非常贴合混合储能装置的需求[25-26],因此选择锂离子动力电池作为HESS的储能元件。
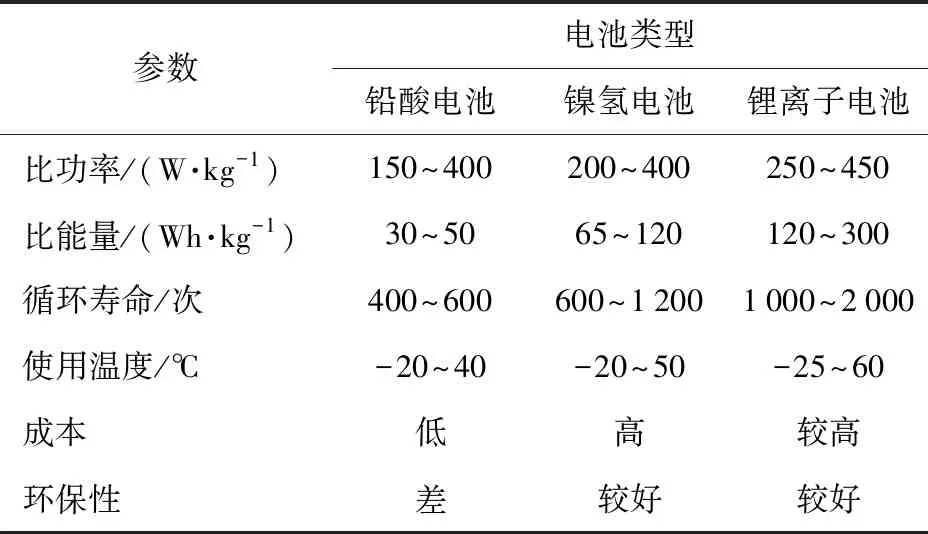
表2 动力电池性能对比
1.2.2 DC/DC变换器分析
根据超级电容半主动式储能系统的工作特性,DC/DC变换器必须具备双向工作的能力,以实现电能双向流动。限于成本、体积等因素,目前车载DC/DC变换器大多选用非隔离型变换器[27],其主要分为4种拓扑结构:双向半桥型变换器、双向全桥型变换器、双向Cuk变换器及双向SEPIC变换器,如图2所示。图2中,S1~S4为功率开关管,C1~C3为电容,L1、L2为储能电感,D1~D4为反向并联二极管。
图2 DC/DC变换器拓扑结构
图2中,双向半桥型DC/DC变换器不需要传递电容,结构简单,且工作效率高,相比于Cuk变换器、SEPIC变换器对电感有较高的要求、全桥变换器复杂的结构、控制逻辑及较高的成本[28],很贴合混合储能装置的要求,因此选择半桥式结构为HESS的变换器。
1.2.3 超级电容分析
超级电容具有功率密度高、循环寿命长、高充放电效率等优点,但其比能量低,因此一般与能量型储能系统混合使用,以实现优势互补[29-30]。根据表3中的法拉第准超级电容、双电层超级电容以及混合型超级电容的性能对比,综合考虑,选择高功率密度的双电层超级电容作为HESS的储能元件。
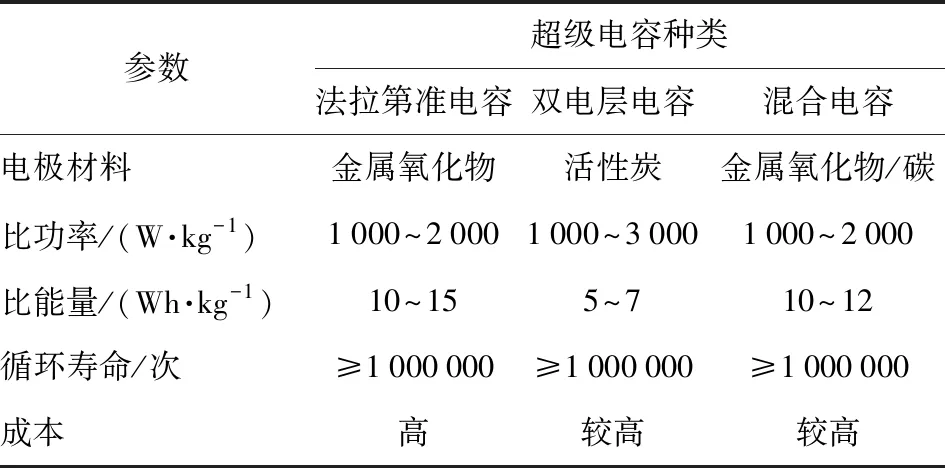
表3 超级电容性能对比
超级电容存储的能量E可以用下式表示:
(1)
式中:C为超级电容的电容量;U为超级电容的电压。
超级电容能量状态(SOE)如下式:
(2)
式中:Umax为超级电容最大工作电压。
选取的超级电容SOE与电压的关系如图3所示。
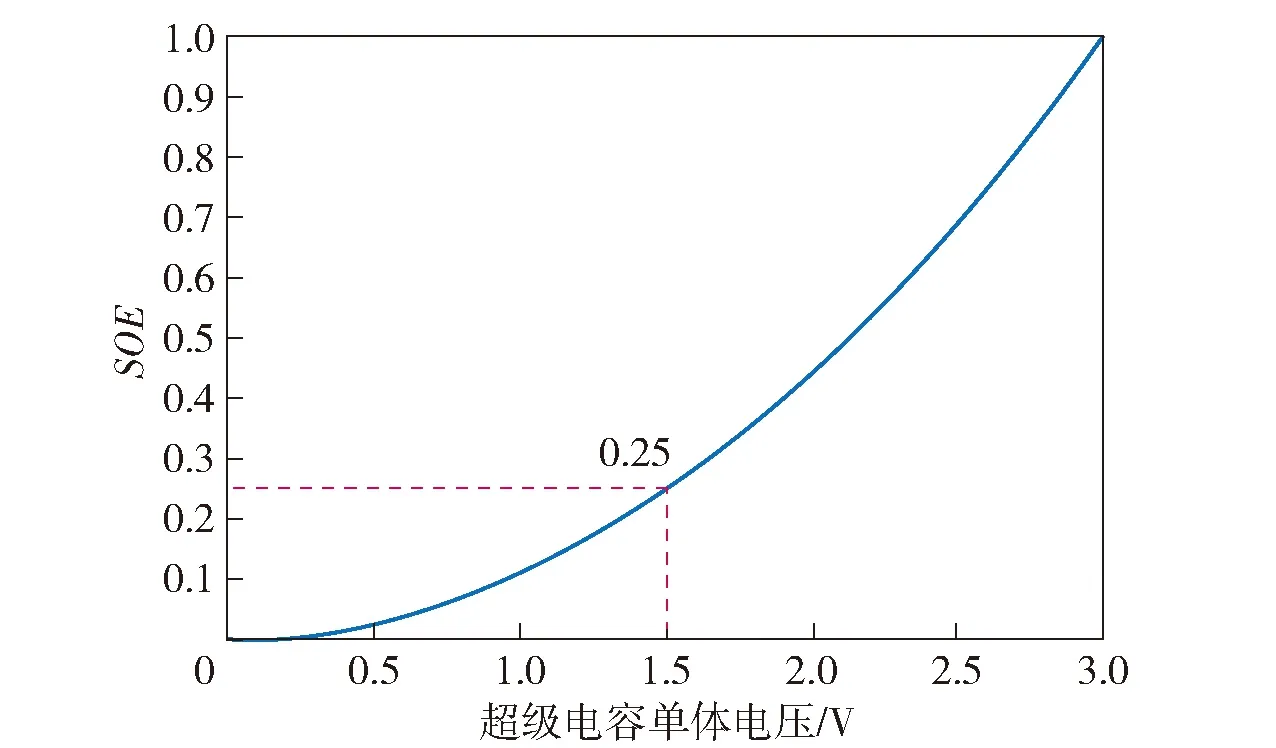
图3 超级电容SOE与单体电压关系
当超级电容电压降低至最高电压的一半时,其存储容量下降为标准容量的四分之一,若继续放电,则超级电容性能变差,可能造成不利影响,因此为了保护超级电容,设置超级电容的截止工作电压Umin为0.5Umax。则超级电容的荷电状态(SOC)定义[31]为
(3)
2 HESS工作模式分析及系统参数匹配
2.1 HESS工作模式分析
结合不同储能元件的工作特性,混合储能装置中动力电池为主能源,为车辆行驶提供主要能量,超级电容为辅助能源,负责供给或回收智能无人车辆急加速或减速等恶劣工况过程中的部分能量。则HESS的工作模式主要包括动力电池单独供电、混合电源联合供电、制动能量回收等,各工作模式能量流如图4所示。
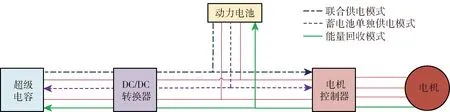
图4 HESS工作模式
其中,动力电池单独供电模式是指当车辆处于匀速工况等状态时需求功率较为平稳,依靠动力电池组便能满足需求,则以锂离子电池组作为能量源,为整车提供电能,同时根据需要可对超级电容组进行充电。联合供电模式是指当车辆处于急加速、爬坡等恶劣工况时,短时需求功率较大,仅靠动力电池组难以满足电能需求,则依靠超级电容优异的瞬时输出能力,由动力电池组与超级电容组共同输出电能,避免动力电池组大功率输出,以延长动力电池寿命。制动能量回收模式是指当车辆处于制动、滑行等工况时,此时电机变为发电机模式,可将车辆动能转为电能,反馈于储能系统,由于超级电容良好的充电性能,优先由其回收电能,同时根据车辆运行及储能元件状态,可反馈一部分给动力电池组。
2.2 HESS参数匹配
智能无人车辆的储能系统需要满足整车动力性及纯电续驶里程等要求。其中车辆动力性要求主要是指储能系统需满足驱动系统的功率需求,以完成越野机动等任务,常用的计算方法为通用动力性计算方法与循环工况匹配法。而纯电续驶里程要求是指储能系统满足智能无人车辆静音行驶的能量要求,以完成隐蔽机动等任务,包括指标直接匹配与工况匹配法[32]。整车性能指标如表4所示,整车主要部件参数如表5所示。

表4 整车性能指标要求
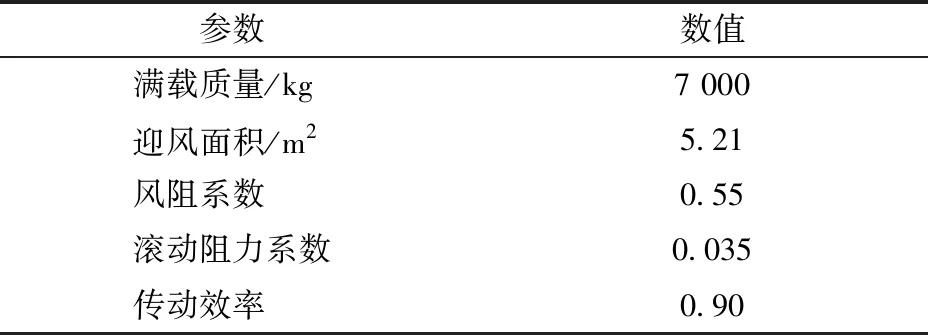
表5 整车主要参数
2.2.1 基于动力性约束参数匹配
2.2.1.1 基于动力性指标参数匹配
1)最大速度需求功率
车辆在平直路面上行驶的最高车速要求大于90 km/h,此时车辆仅受滚动阻力和空气阻力[33],则此时需求功率为
(4)
式中:ηT为传动系效率;m为车辆质量;g为重力加速度;f为滚动阻力系数;umax为最高车速;CD为空气阻力系数;A为迎风面积。
2)加速需求功率
加速时不要求车辆爬坡,不受爬坡阻力,则需求功率为
(5)
式中:ua为加速末速度;δ为车辆旋转质量转换系数;t为加速时间。
3)最大爬坡需求功率
车辆爬坡时,不要求此时加速,功率如下所示:
(6)
式中:ub为爬坡时速度;a为爬坡角度。
4)平均越野需求功率
智能无人车辆越野时,平均需求功率如下所示:
(7)

综上,输出功率至少为
P≥max(Pv,Pa,Pc,Pc-c)
(8)
则P≥176.79 kW。
2.2.1.2 基于循环工况参数匹配
循环工况选择国家标准的中国典型货车行驶工况(CHTC-HT)(来自GB/T 38146.2—2019),根据工况的车速等信息计算出其功率需求,如图5所示。车辆需求最大功率约为178.77 kW,不计制动时车辆需求功率,可得出驱动平均功率为34.31 kW。
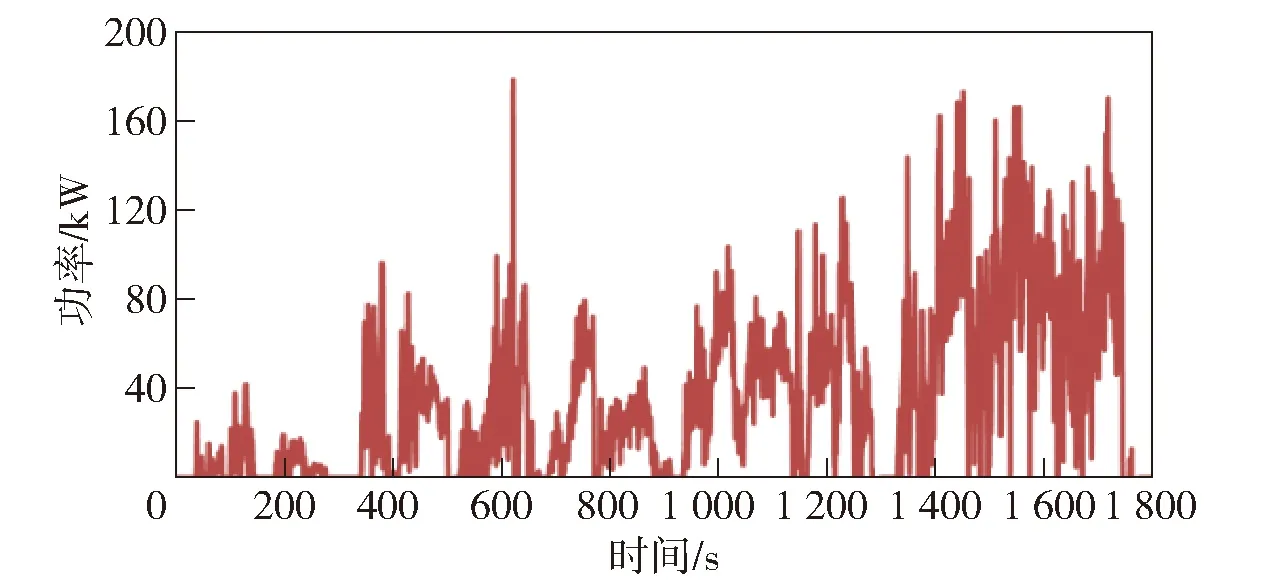
图5 典型工况需求驱动功率
结合指标匹配法和工况匹配法,选择驱动电机总峰值功率约为179 kW。考虑车载附件损耗,在此基础上扩大一定倍数[33];同时,为满足智能无人车辆上装载的激光雷达、相机及毫米波雷达等感知器件及其他部件的用电功率需求,综合考虑,选型电机总峰值功率为210 kW,车载能源系统输出功率约221 kW。
2.2.2 基于能量约束参数匹配
1)储能系统能量指标匹配法
储能系统的能量需要满足智能无人车辆静默行驶要求[34],此时车辆仅受滚动阻力和空气阻力,则车辆驱动力所做的功为
(9)
式中:ud为行驶速度;s为行驶距离。
代入相关参数,得到车辆行驶所需能量约为19.47 kW·h。考虑到驱动电机效率等因素影响,同时车辆的驱动能耗与车载附件如激光雷达等器件的能耗分别占总能耗的50%与13%,则储能系统最低能量[24]为
(10)
式中:Eu为满足等速续驶里程要求的最小容量;ηe为驱动电机效率;Sf为附件能耗。计算得出储能系统最低能量约为26.19 kW·h。
2)储能系统能量工况匹配法
根据循环工况得到的平均驱动功率可以计算储能系统输出功率,同时考虑智能无人车辆激光雷达、摄像头等感知器件及其他附件消耗等因素,则储能系统的最低能量为
(11)
式中:Ec为满足循环工况要求的最小容量;Pave为循环工况平均驱动功率;tc为循环工况下行驶20 km所需时间。由此计算得出储能系统最低能量为 26.64 kW·h。
结合上述两种方法,则HESS最低可用能量E为
E≥max(Eu,Ec)
(12)
综合考虑,储能系统的最低可用能量为27 kW·h。
2.2.3 基于能量回收参数匹配
由电机驱动的车辆在减速过程中,可以控制电机转为发电机模式以回收部分能量,从而延长续驶里程,但同时也对车载储能系统的充电功率及存储容量提出了要求。为了有效减小频繁制动对动力电池的冲击,根据本文的HESS方案,考虑超级电容的容量至少可吸收最高车速刹车时的回收能量[35],即
(13)
式中;Er为满足能量回收要求的超级电容最小容量;ηb为制动能量回收转换效率。
“现在的模式不是最终的版本,也并非完美,由于医院的目标在变,所以要不停地修订。”施秉银说,为了医院的发展,怎么调整目标或完善目标,是非常难的事情。最难的是,有些部门的工作很难考核。如后勤辅助部门,通下水道、修管道、环境巡视及一些外包服务,很难考核。
同时,根据选配的电机,在制动过程中,当电机以满负荷制动时,考虑附件消耗功率约15%,则储能系统最大回收功率至少为179 kW。
3 混合系统参数优化
为了确定HESS中储能元件的最优数值,以动力电池与超级电容器单体数量的极限值为优化边界条件,基于车辆动力性、静音续驶里程等约束,以轻量化为目标进行系统参数优化,实现储能系统输入输出能力与系统质量的平衡。
3.1 储能元件单体数量极限值计算
3.1.1 动力电池数量极限值计算
基于1.2.1节的分析,选择某能量型锂离子电池为能量源,标称容量45.3 A·h,额定电压3.6 V,具体参数如表6所示。储能系统中动力电池作为能量元件,是整车能量的主要来源,为避免其大倍率充放电,限制其最大充放电倍率为1 Cb,以延长寿命;同时为避免电池不可逆损伤,设定电池的有效放电系数为0.8,以免电池深度充放电,则此时动力电池可用容量大约为总容量的80%。综上考虑,为了保证锂离子电池的有效能量达到27 kW·h,其总能量需达到33.75 kW·h,电池单体数量需要 207块,而要使其有效输出功率达到221 kW,则需要1 356块电池单体。
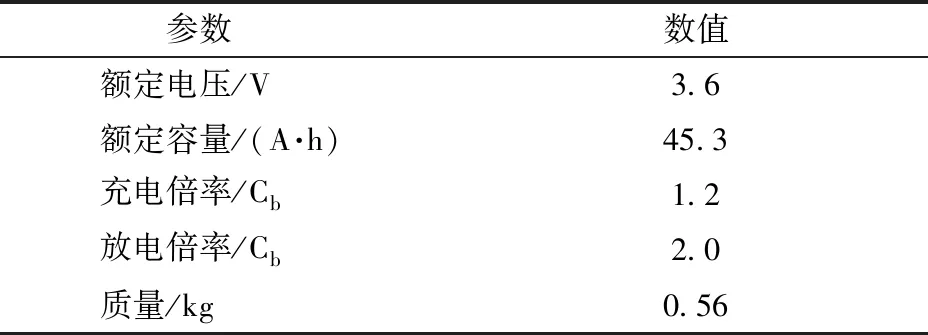
表6 动力电池参数
3.1.2 超级电容数量极限值计算
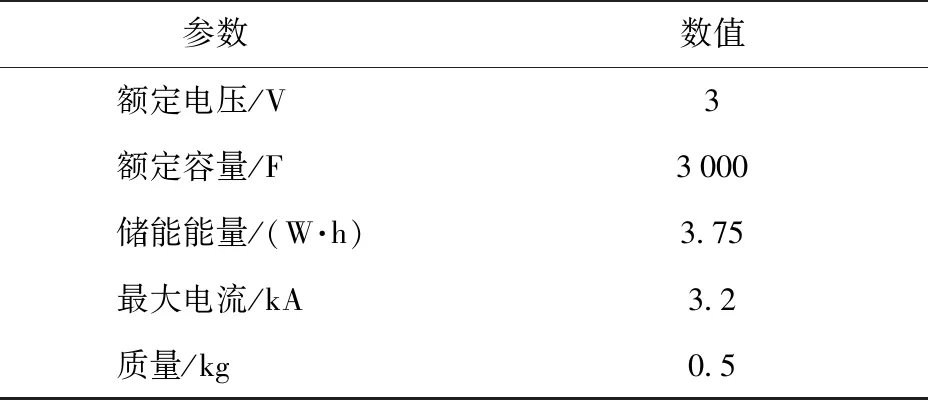
表7 超级电容参数
另外,为了防止充电过程中浪涌电压造成的影响,设置超级电容荷电状态上限值为95%,同时为使得超级电容尽量工作于高效区域,设置超级电容荷电状态下限值为10%,则单体超级电容存储能量如下式:
(14)
式中:USOC_max为超级电容荷电状态上限值对应电压;USOC_min为超级电容荷电状态下限值对应电压。则当满足27 kW·h有效能量时,需要11 112块单体。
为了充分发挥超级电容“削峰填谷”作用,在设计控制策略时,灵活调整超级电容的SOC,在高速时维持较低的SOC状态,以待回收能量;在车速较低时,维持较高的SOC状态,以待助力车辆加速。同时为保证一定余量,综合考虑,本文规定超级电容SOC在低速时维持在0.7~0.9左右,在高速时维持在0.1~0.3左右。则在吸收电能时超级电容可用容量为可用总容量的76%,在输出电能时超级电容可用容量为可用总容量的70%。
此外,超级电容在使用中不仅需要承担输出峰值功率的作用,还需承担制动回收的作用,根据前文计算,HESS的最大回收功率至少为179 kW。
3.2 储能元件数量优化
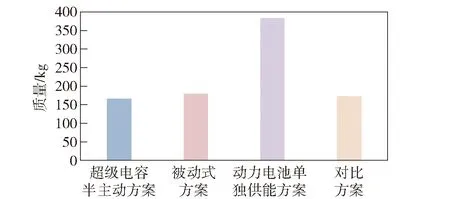
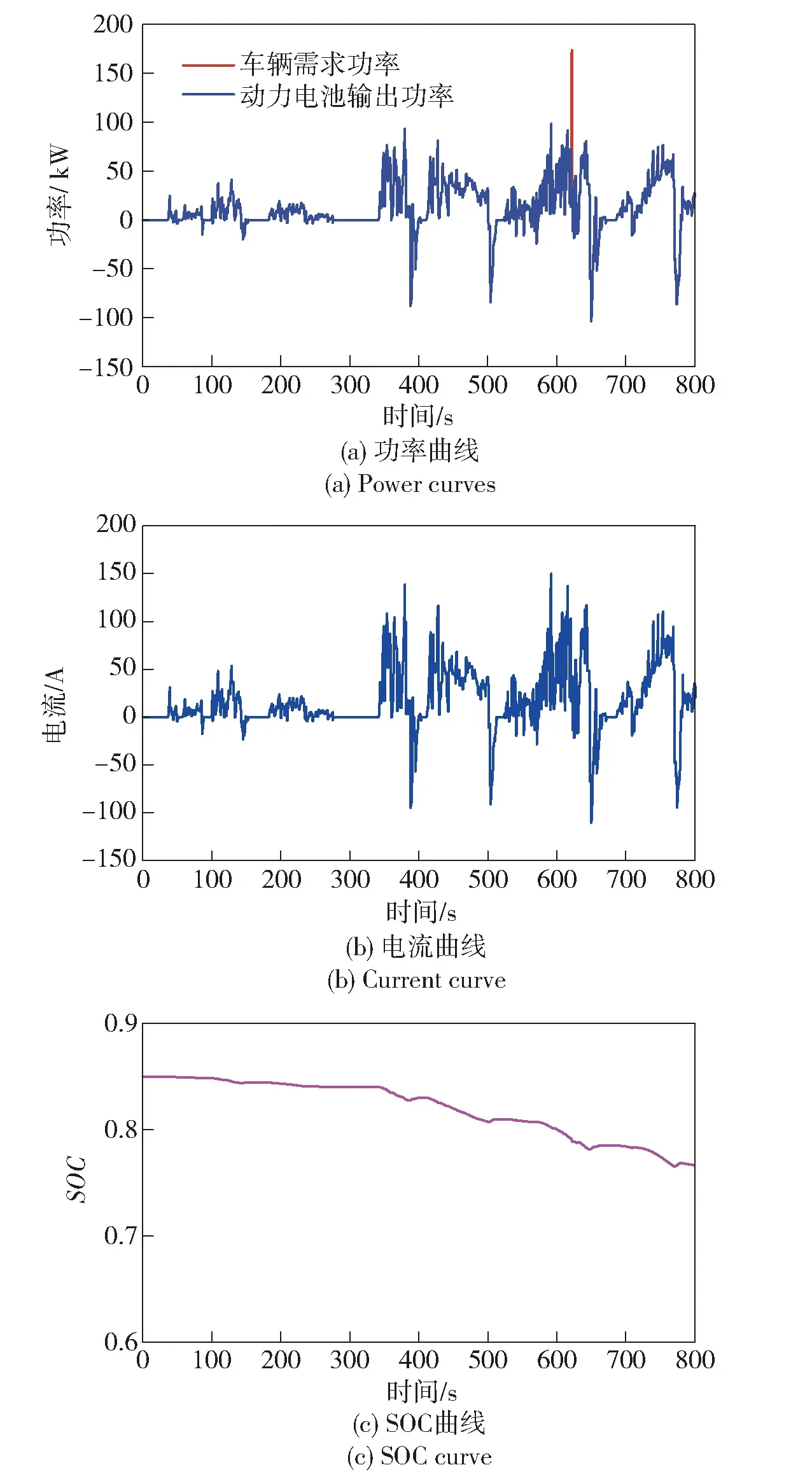
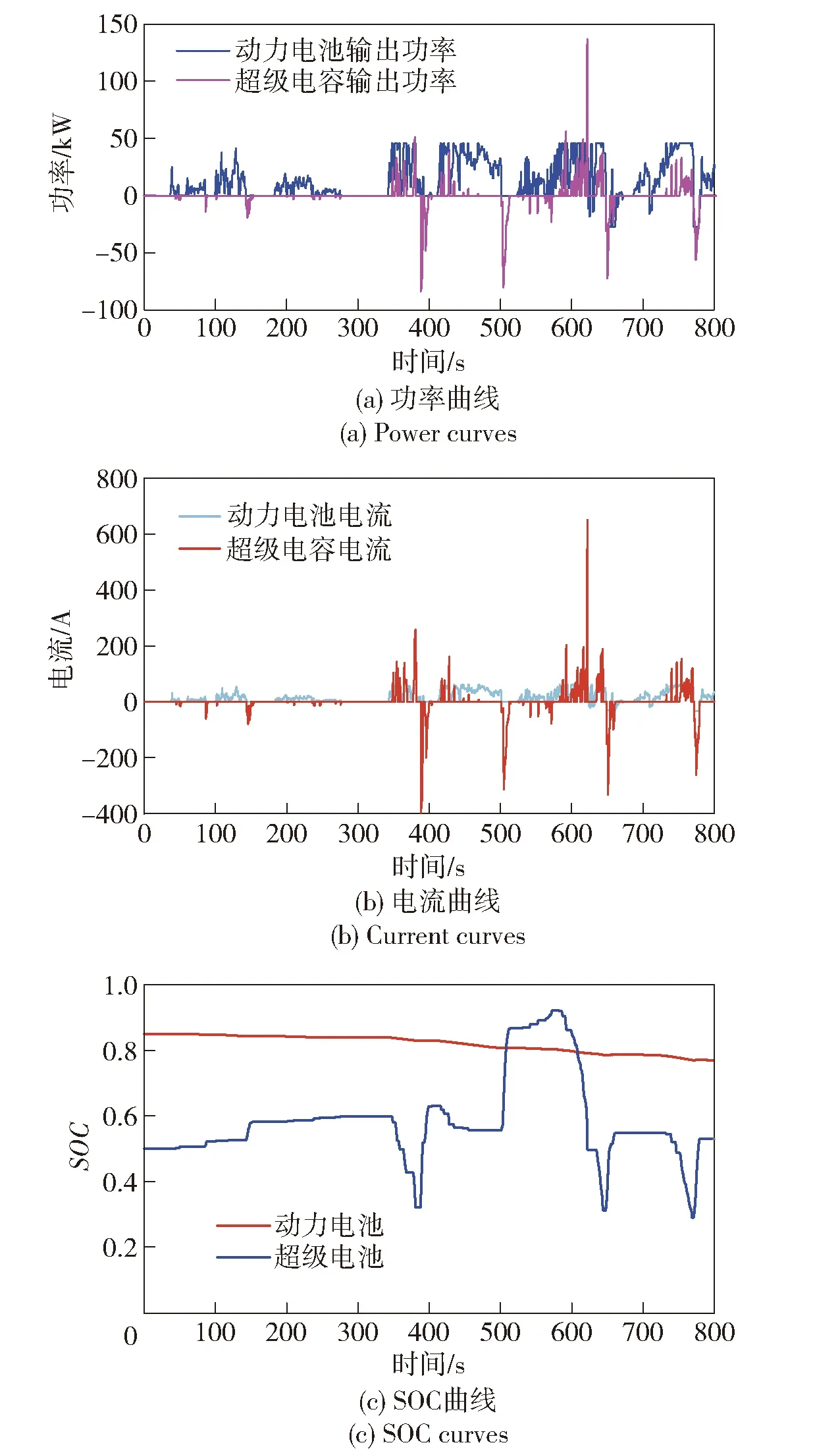
为满足智能无人车辆快速机动的需要,对整车质量限制较为严格,为此本文将HESS的功率与能量需求等作为约束条件,以储能系统质量最小作为优化目标,对系统参数进行优化。假设储能系统中超级电容器的数量为x,锂离子动力电池的数量为y,则x和y的取值范围分别为0 (15) 由于对部件质量有严格限制,在满足条件的x和y可行域内以质量最小为优化目标,寻找可行域内的最优值,基于动力电池及超级电容的单体质量,则目标函数为0.5x+0.56y,可行域如图6所示,可得到最优值为x=101,y=206,此时系统质量最小。 图6 目标函数与可行域 当系统额定电压为370 V时,若选择被动式方案,则超级电容需要124块、锂电池206块便满足要求,根据串并联规则,确定选取超级电容124块串联、锂电池串联103块后再并联,最终系统单体总质量为177.36 kg。根据1.1节对混合系统拓扑结构的分析,选择超级电容半主动式构型,同时考虑DC/DC特性,选取超级电容101块串联、锂电池串联103块后再并联。当只采用动力电池方案并以最大输出功率计算时,需要动力电池678块。同时,以文献[35]优化方法为对比方案,综合考虑附加损耗等能量需求后,得到系统质量对比如图7所示。 图7 不同方案对比 由图7可以发现,采用动力电池单独供能方案时系统质量最大,不仅会增加驱动系统负担,还会对车载设备布局产生影响。而采用超级电容半主动方案质量最小,为降低智能无人车辆整体质量提供了良好基础。且根据前文分析不同拓扑结构优缺点,超级电容半主动式方案可以充分发挥超级电容优势,承担瞬时大功率输入输出工作,总线电压也更加稳定,有利于整车性能的进一步提升。同时,与对比方案相比,本文优化结果质量更轻,验证了优化的有效性。 根据第2节与第3节匹配的混合系统参数,建立超级电容半主动式构型仿真模型以验证可行性,主要包括工况模块、混合储能控制模块、混合储能模块及状态监测模块等模型,其中混合储能模块包括电池系统、超级电容系统及DC/DC系统等,同时也建立了单独电池储能模型,以便进行对比。以CHTC-HT工况前半部分为例,对比HESS与动力电池单独供能方案的充放电电流与SOC,结果如图8、图9所示。 图8 动力电池系统方案仿真结果 图9 HESS方案仿真结果 动力电池单独供能方案中,动力电池独自承担车辆运行过程中的输入输出功率,如图8(a)所示,可以发现在620 s附近,由于需求瞬时功率大,动力电池功率难以满足需求,车辆的动态性能受到影响;同时根据图8(b)电流变化可知,系统电流变化范围大且峰值电流高,因此对动力电池的性能提出了较高的要求,对动力电池寿命有不利影响。 在混合储能方案中,超级电容由于其高功率密度及较高的充放电效率,能够很好地满足车辆激烈工况中的瞬时大功率需求,系统输出功率变化如图9(a)所示,为了保护动力电池组,其输入输出能力受到一定限制,由超级电容组进行动态补充,以满足车辆实时需求;同时可以发现,在制动阶段,基于实时状态,超级电容介入非常频繁,不仅可以及时回收能量,还可减少电池介入的次数,延长其使用寿命。根据图9(b)所示电流曲线,在整个过程中,动力电池组电流均在一定范围内平稳变化,没有峰值电流,通过超级电容实时补足,可以有效避免大电流对电池造成的损害,减缓其老化。系统SOC变化如图9(c)所示,动力电池作为能量的主要提供者,其SOC随着无人车的运行而逐渐降低,但变化较为平缓,而超级电容由于能量存储容量较小,在车辆运行过程中不断进行充电与放电,SOC状态起伏较大,同时其SOC变化在0.3~0.9之间变化,根据前文分析,此时超级电容拥有较高的充放电效率,可以充分发挥其“削峰填谷”作用。 综上分析,匹配优化的超级电容半主动式储能系统可以很好地满足无人车辆整车功率需求,为其进行高速越野机动提供良好支撑,同时通过利用超级电容的高效工作区间可以有效降低动力电池峰值电流,减少其充放电介入次数,延缓其老化过程,从而延长其服役寿命。 为提升智能无人车辆储能系统的综合性能,本文基于车辆动力性指标、静音行驶里程和典型循环工况等性能约束,提出了一种以轻量化为目标的HESS参数匹配优化方法,以实现储能系统输入输出能力与系统质量的平衡。得到主要结论如下: 1)由锂离子电池组与双电层超级电容组成的超级电容半主动式储能系统非常贴合智能无人车辆的运行特性及使用需求,可以充分发挥超级电容“削峰填谷”的优势,仿真结果显示该方案能够有效降低动力电池大电流冲击,延长动力电池使用寿命。 2)匹配优化方法可以有效降低系统质量,相比于被动式方案、动力电池单独供能方案及对比方案,优化后的超级电容半主动式方案质量更轻,在系统输入输出能力与系统质量之间找到了平衡,提升了车辆综合性能。 综上所述,本文提出的智能无人车辆HESS的构型选取及参数匹配优化方法有效可行。下一步将结合混合系统能量管理优化策略进一步提升HESS性能,并进行实车试验。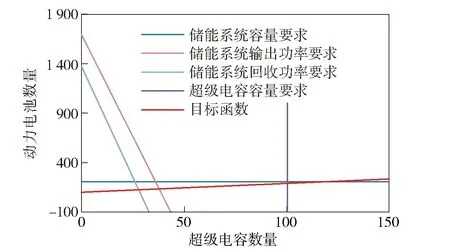
4 仿真分析
5 结论