基于QualNet的无人机信息攻击半实物测试架构设计与实现
2023-10-07李思琪龚鹏单丹李剑锋刘宇高翔
李思琪, 龚鹏, 单丹,2, 李剑锋, 刘宇, 高翔*
(1.北京理工大学 机电学院, 北京 100081; 2.沈阳建筑大学 电气与控制工程学院, 辽宁 沈阳 110168)
0 引言
无人机的诞生可以追溯到1914年,随后其凭借性能良好、行动灵活等特点,在军事领域中被广泛使用。军用无人机作为现代空中军事力量中的一员,具有使用限制少、隐蔽性好、效费比高等特点,在现代战争中的地位和作用日渐突出。随着战争信息化加快,军用无人机进一步发展出无人机群协同作战路线,对其组网和通信能力提出更高的要求[1-4]。尽管无人机在军事领域发展迅速,但工作中其数据链路易受到干扰,导致无法正常执行任务[5-7]。因此,无人机干扰与反干扰技术成为无人机技术研究中的热点问题,对无人机数据链路及干扰攻击效果的仿真模拟可以为该技术的研究提供重要支撑。
在对无人机数据链路的干扰攻击研究中,首先会考虑到理论分析和实物测试。但当无人机组网规模大、执行任务复杂度高时,理论分析存在计算量大、研制周期长等问题;实物测试存在投入较多、环境不稳定等问题,从而导致这两种方法难以投入使用。计算机仿真凭借其工作高效、成本可控和受环境影响少等优点,可以解决大规模仿真中理论分析和实物测试出现的部分问题。目前,主要有OPNET[8]、NS-2[9]、QualNet[10]等主流仿真软件,可完成不同规模网络的模拟仿真。但在无人机大规模仿真过程中存在部分组件难以构建数学模型且易受环境变化等的影响,导致计算机仿真难以满足测试需求。这时,利用半实物仿真可以将其中不易建模的部件以外部模型或实物替代,可以提高系统设计的可靠性[11]。因此,大部分无人机相关技术研究过程中均利用半实物仿真作为验证手段。
20世纪60年代,Klaus Capple等开发了无人机半实物仿真方法,无人机仿真从理论转为现实。20世纪70年代,美国和日本等国陆续建设大批半实物仿真实验室,开展了多项飞行器研制相关的仿真测试,缩短了飞行器的研制周期[12-13]。随着微机电系统相关技术的提升,无人机开始向小型化发展,无人机半实物仿真技术也随之受到科研人员更多关注。斯坦福大学Tomlin团队在半实物仿真平台下进行无人机控制算法验证,提高了对无人机姿态和位置的控制能力[14]。Prochazka等提出用于验证混合无人机容错控制方法的半实物仿真平台,验证飞行控制器在目标硬件上实现方法的正确性以及所用算法的实时性,减少了研制的成本,提高了控制算法的可行性[15]。
20世纪80年代初,我国建设了一批大型半实物仿真实验室,开始对飞行器半实物仿真测试方面进行研究,虽然研究开始较晚,但进步较快[11,16]。航天科工海鹰仿真中心研制开发出基于Windows NT+RTX的半实物仿真系统,该系统实时性高,人机界面友好,易于扩展[17]。南京航空航天大学仿真模拟实验室提出了综合复杂传播环境下的无人机通信信道理论模型,并在此基础上设计实现了无人机通信干扰电磁环境半实物仿真系统,可用于无人机通信链路抗干扰性能的分析、测试和评估[18]。西北工业大学飞行控制与仿真技术重点实验室结合准确的无人机6自由度非线性数学模型和xPC实时系统模块研发了无人机飞控半实物仿真系统,该系统可模拟生成无人机在不同指令控制下的飞行状态信息,为无人机飞控系统开发提供了支撑[19]。
综上,无人机半实物仿真在国内外均取得了很大进展,但上述半实物仿真系统更多关注的是协同工作流程,对于其无线通信网络,未考虑或简化了数据传输链路的传输性能对无人机协同工作的影响,缺少“信息维”和“网络维”的深层次仿真。同时大部分半实物平台存在仿真进程不可动态实时更改的问题。
为更精确地验证无人机被加载信息干扰攻击后对其通信网络效能的影响,本文提出了一种针对无人机信息攻击的半实物测试方法,关注“信息维”和“网络维”,以典型无人机数据链路为目标,对其体系结构、工作机制等方面进行建模仿真,实现仿真进程动态实时可更改。该半实物测试方法基于QualNet仿真软件,通过分析典型无人机数据链路,构建目标仿真环境,设计了半实物接入模块和与系统相匹配的无人机数据传输接口,实现在仿真过程中根据实际攻击手段和效果实时动态地以指令控制的形式对无人机干扰攻击进行仿真模拟。该无人机信息攻击半实物测试方法对于改进现有的无人机信息攻击策略及相应的防御方法具有重要的意义,可支撑无人机及反无人机关键技术验证。
1 无人机信息攻击半实物测试架构
在无人机信息攻击半实物测试中模拟的3种干扰攻击加载效果分别为:
1)无人机遥测链路干扰:信息攻击启动后,地面站无法接收任务机的遥测信息;攻击结束后,地面站重新接收任务机的遥测信息。
2)无人机遥控链路干扰:信息攻击启动后,地面站可以接收任务机的遥测信息,但失去对任务无人机的控制;攻击结束后,地面站重新获得对任务无人机的控制。
3)无人机接管控制攻击:信息攻击启动后,干扰机发送某种控制指令,任务无人机依照该指令执行相应的操作。相反地,地面站失去对任务无人机的控制,但可以观察到任务机被操控并接收其遥测信息。
同时,本文无人机信息攻击的半实物测试架构在整个设计过程中应贯彻以下原则:
1)该测试架构要具有一定的灵活性和高度的开放性,便于网络模型、无人机模型、对抗模型的不断发展和扩充,及时适应使用需求变化。
2)该测试架构应能够为数字仿真和半实物设备模型定义接口,并实现相互间数据交互,通过真实设备环境与模拟环境互为补充、互为验证,提高对抗仿真验证能力。
3)该测试架构作为一个综合性的无人机信息攻击半实物测试架构,内容丰富、接口多样,设计与实现应遵循阶段性原则。首先完成测试架构本身的设计规划,以及典型模型的设计实现,解决急需。然后根据实际需求逐步增加网络模型、半实物接口以及半实物接入模型。
4)该测试架构设计采用新一代面向服务架构,系统功能可重构,资源可动态分配。
5)该测试架构设计围绕系统集成和人机交互操作实现,加强通用设计,提高产品的成熟度和稳定性。
在无人机信息攻击半实物测试中,需要实现干扰攻击的动态加载、三维态势中攻击效果的实时展示、对无人机的实时控制以及无人机自身遥测信息的实时显示。针对上述需求,本文设计了一种无人机信息攻击半实物测试架构[20],如图1所示。
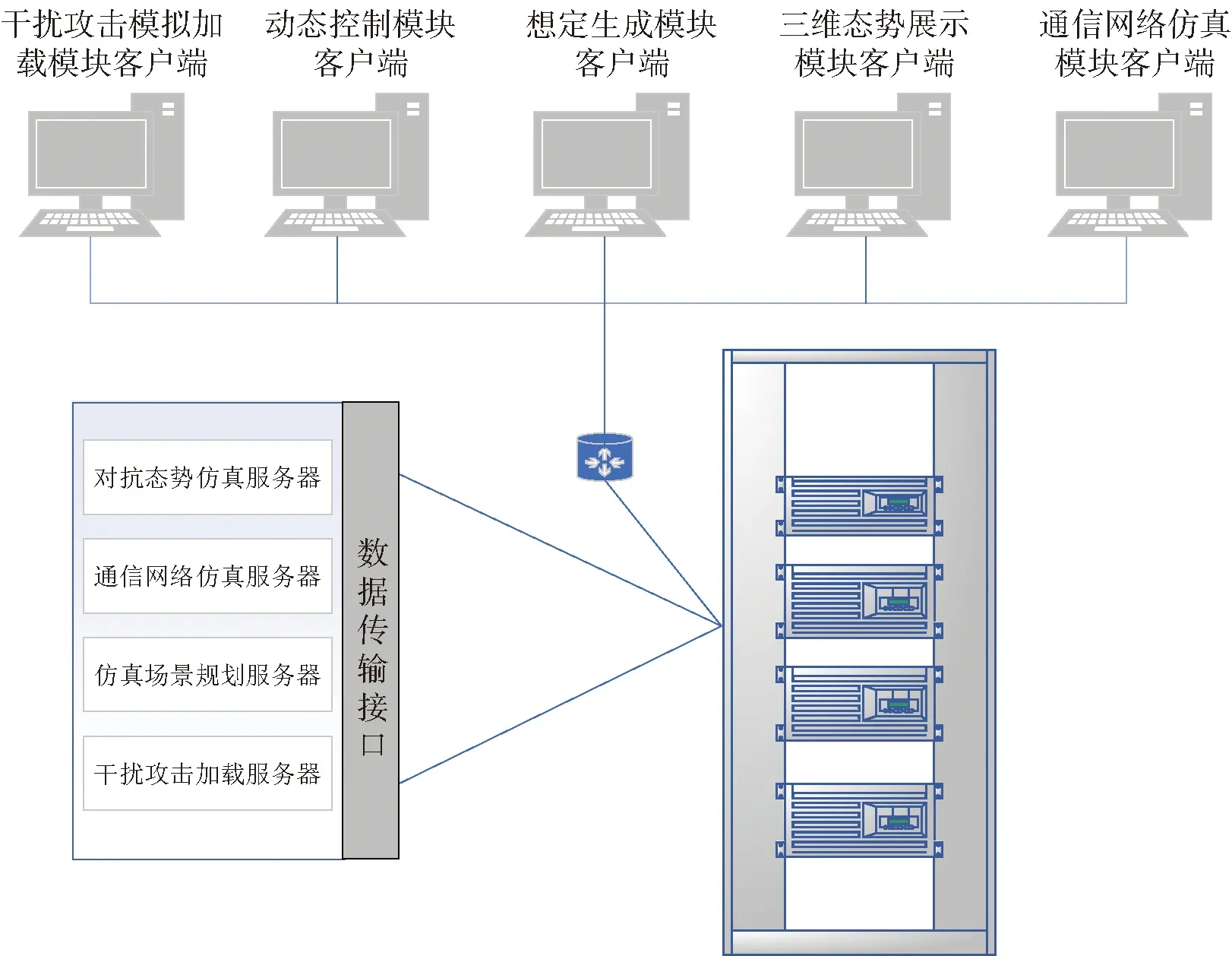
图1 无人机信息攻击的半实物测试架构
该半实物测试架构将整个无人机信息攻击半实物测试系统划分为6个模块,各模块功能介绍如下:
1)通信网络仿真模块:该模块利用QualNet对无人机信息攻击网络模型进行建模,是无人机系统仿真的基础。在仿真过程中,该模块能够提供信号衰减模型、信噪干扰模型、移动模型和无线传播模型,同时支持通信协议的开发,并且能够通过对各层协议的设计开发定制数据链网络模型。
2)想定规划模块:该模块主要完成仿真场景设计,明确仿真模块部署、节点信息关系、仿真运行时间、仿真流程、通信网络的配置和业务应用,并细化各无人机的性能参数、运动轨迹以及随时间变化情况,形成想定脚本,下发给仿真参与模块。
3)干扰攻击模拟加载模块:该模块主要负责模拟对无人机干扰攻击的动态加载。在无人机信息攻击半实物测试过程中,该模块能够以指令控制的方式对遥测干扰、遥控干扰和接管控制攻击的干扰攻击手段和效果进行仿真模拟。无人机仿真系统能实时对模块所加载的干扰攻击指令进行响应,并能通过三维态势展示模块进行实时展示。
4)三维态势展示模块:该模块通过三维态势及模型实现对仿真中无人机态势的展示和标绘,可实时展示攻击加载效果。三维态势展示模块主要包括地形模型、环境模型和轨迹模型等,可以动态展示无人机的飞行轨迹,具备目标坐标、高度和速度等参数的计算功能。
5)动态控制模块:该模块主要负责模拟地面站对任务机的实时控制与状态监视。该模块将人在界面进行的操作构造成指定类型的数据包并发送至通信仿真模块的仿真场景中,实现对无人机飞行仿真的干预。干预的手段包括使无人机进行左盘旋、降落和爬升等,模拟地面监控系统对目标无人机的实时控制。同时无人机自身的状态信息,如实时坐标、姿态和速度等,将通过通信网络仿真模块回传给动态控制模块,模拟地面监控系统对目标无人机的状态监视。
6)数据传输接口模块:该模块主要负责无人机信息攻击半实物测试中各模块间的数据传输。通过此接口,三维态势展示模块可接收通信网络仿真模块发送的场景数据和模型状态数据并作出实时响应,干扰攻击加载模块依托该接口将指令传送到仿真通信网络,然后对网络中的虚拟无人机节点进行作用。同时,动态控制模块也通过此接口将控制指令传送到仿真通信网络对虚拟无人机节点进行动态实时控制,并依托此接口从虚拟通信网络中接收虚拟无人机节点自身遥测信息。
2 无人机数据传输接口设计
2.1 无人机数据传输接口框架设计
基于RTI-DDS开发的无人机数据传输接口的框架[21]如图2所示,其中通信网络仿真模块基于QualNet软件对无人机信息攻击网络模型进行建模。作为域参与者的各模块利用各自创建的发布者与订阅者通过中间件RTI-DDS进行信息与指令的交互,对于测试中每一种需要交互的数据类型,发布者和订阅者都分别创建一个对应的数据写和数据读来发送和接收该数据。三维态势展示模块的通信接口负责与通信网络仿真模块的数据交互,监听来自QualNet的虚拟节点态势信息。想定规划模块的通信接口负责向QualNet发布仿真场景参数数据。干扰攻击模拟加载模块的通信接口负责向QualNet发布干扰数据和通信参数请求,同时接收QualNet的应答。动态控制模块的通信接口负责向QualNet发布遥控数据,同时订阅QualNet发布的遥测数据。QualNet网络仿真软件的外部接口负责QualNet与外部模块的数据交互,接收来自动态控制模块、干扰攻击模拟加载模块和想定规划模块的数据包,并对动态控制模块、干扰攻击模拟加载模块的请求发送应答,同时向三维态势展示模块发布数据。

图2 无人机数据传输接口的框架
2.2 无人机数据传输接口数据交互关系
在仿真过程中,基于QualNet仿真软件构建通信网络仿真模块,QualNet仿真软件与想定规划模块、干扰攻击模拟加载模块、三维态势展示模块、动态控制模块需要交互的数据分为遥控数据、遥测数据、态势数据、通信参数数据、干扰参数数据和仿真场景参数数据。其中态势数据主要包括真实航迹数据、数据传输线数据、被干扰节点状态数据、干扰机状态数据和被遥控节点状态数据。表1为无人机数据传输接口数据的交互关系。
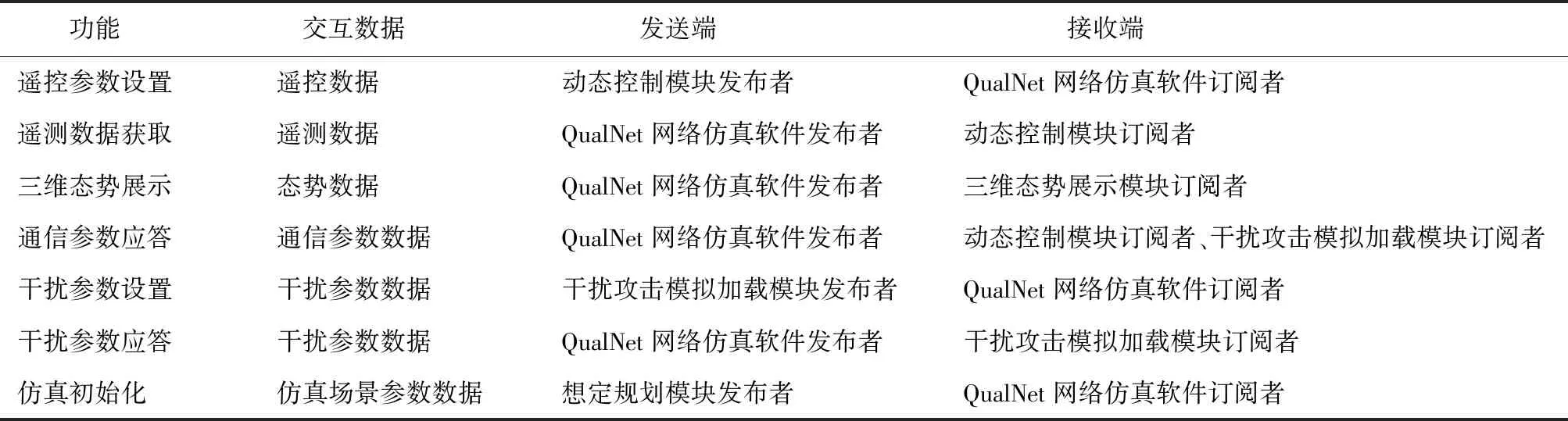
表1 无人机数据传输接口数据交互关系
2.3 无人机数据传输接口典型数据结构体设计
以无人机数据传输接口定义的较为重要的数据类型结构体的具体字段为例,对交互数据的结构体设计进行详细说明,包括遥控数据、遥测数据和干扰参数数据。
遥控数据的结构体名称为KjRemoteControl。KjRemoteControl结构体的具体说明如表2所示。
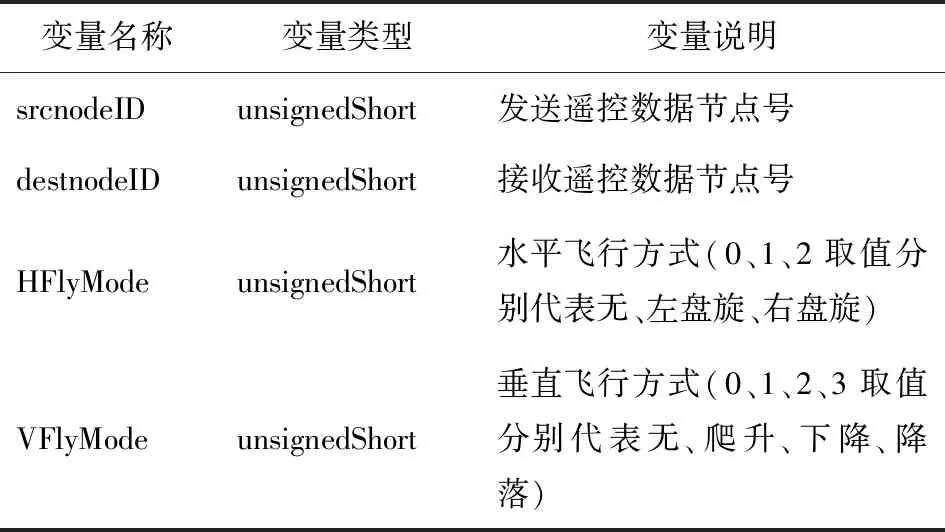
表2 KjRemoteControl结构体的具体说明
干扰参数数据结构体名称为UavJammerData。UavJammerData结构体的具体说明如表3所示。
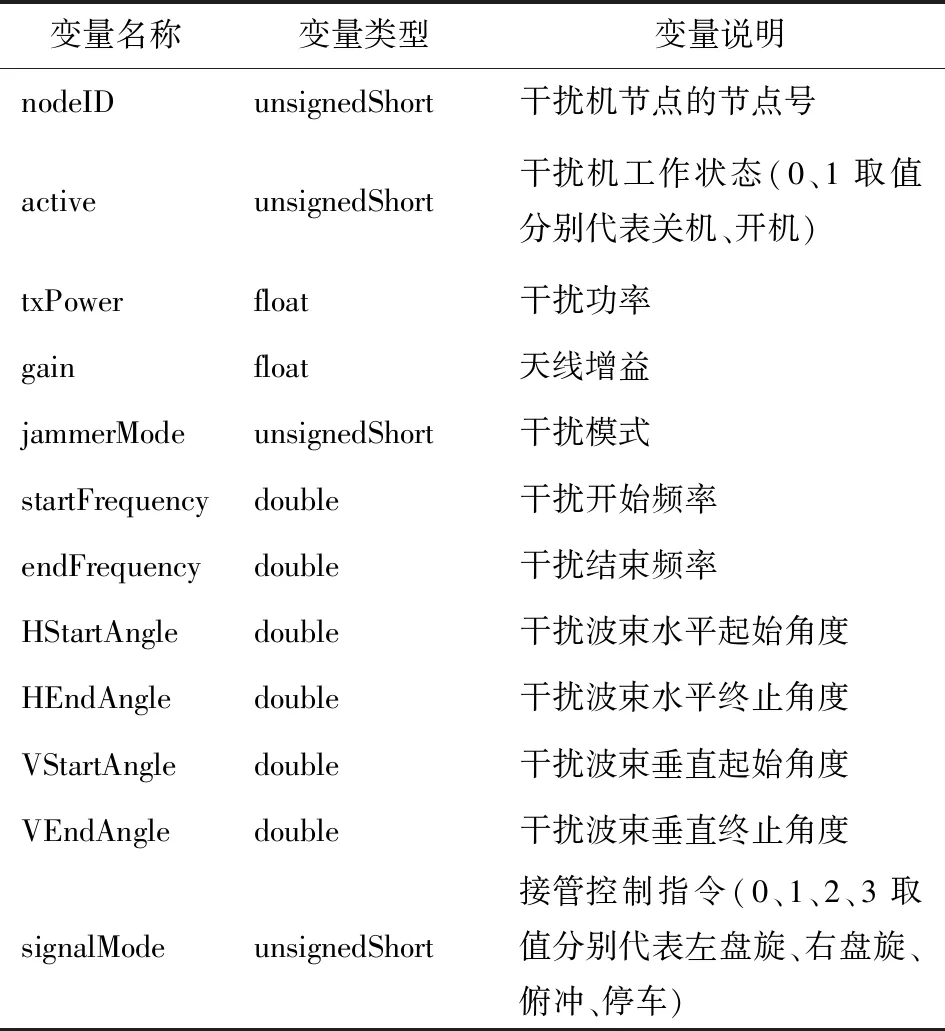
表3 UavJammerData结构体的具体说明
遥测数据结构体名称为KjRemoteMeassure。KjRemoteMeassure结构体的具体说明如表4所示。
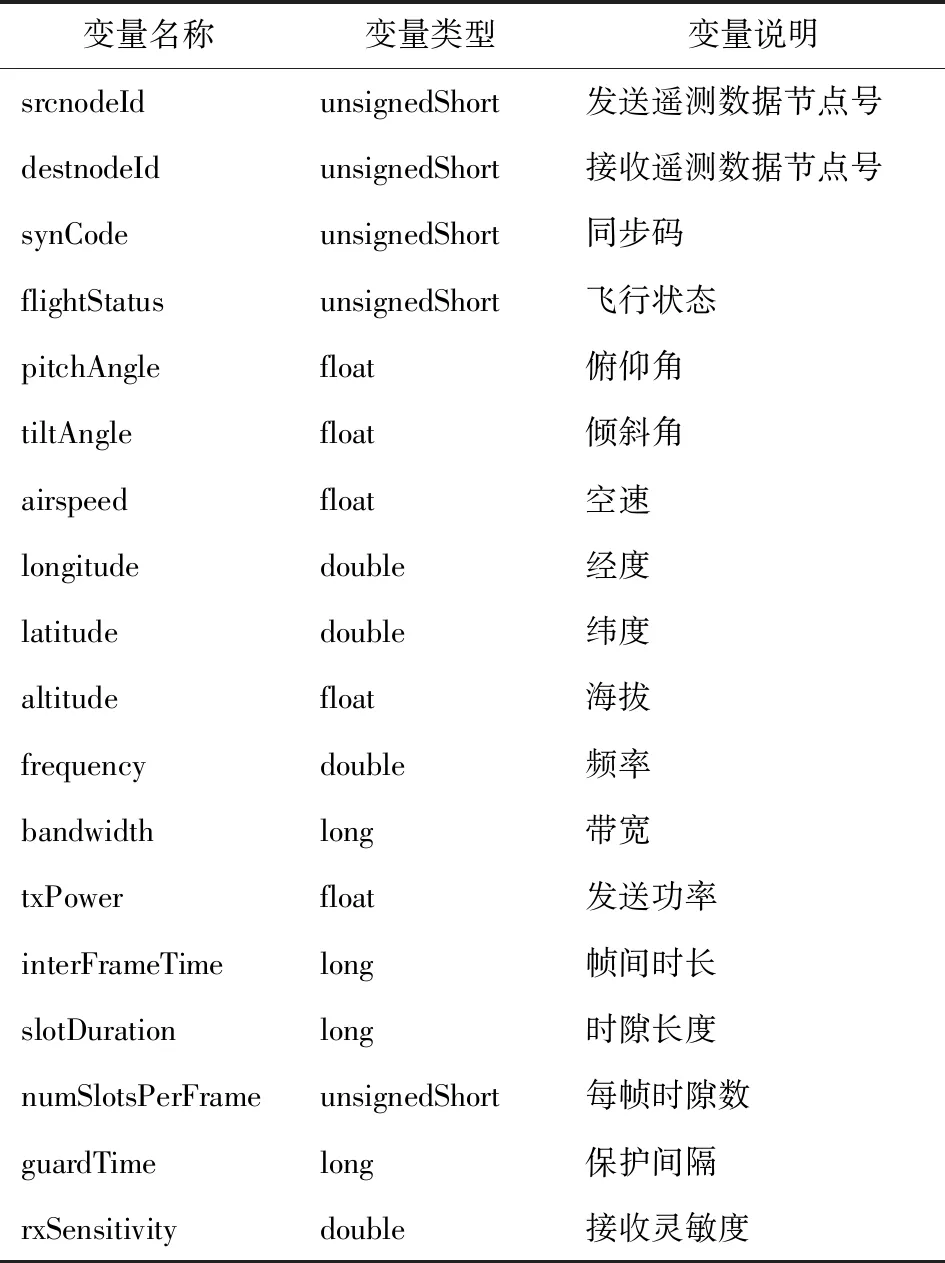
表4 KjRemoteMeassure结构体的具体说明
3 无人机信息攻击半实物接入模块设计
3.1 干扰攻击模拟加载模块设计
干扰攻击模拟加载模块主要分为两部分:基于QualNet开发框架的干扰应用模型与基于Qt应用程序开发框架的干扰攻击模拟加载界面。通过干扰应用模型和干扰攻击模拟加载界面可实现在半实物测试过程中对任务无人机的遥测链路干扰、遥控链路干扰、接管控制攻击加载过程和效果的模拟。
3.1.1 干扰应用模型设计
干扰应用模型的工作流程如图3所示。干扰应用模型加载在干扰机节点上,模拟干扰机节点对任务机节点的干扰攻击效果。经过初始化后,干扰机节点上接收干扰攻击界面的指令,设置干扰参数,产生干扰攻击指令数据包并广播,同时经过接口将干扰攻击指令发送给三维态势展示界面。经过初始化后任务机节点接收被广播的干扰攻击指令数据包,解析指令数据包后判断干扰效能。如果干扰成功,则任务机节点根据指令修改遥控和遥测应用中对应标志位或航迹信息,同时将干扰结果发送给三维态势展示界面;否则丢弃该数据包,任务机节点不受到干扰攻击。
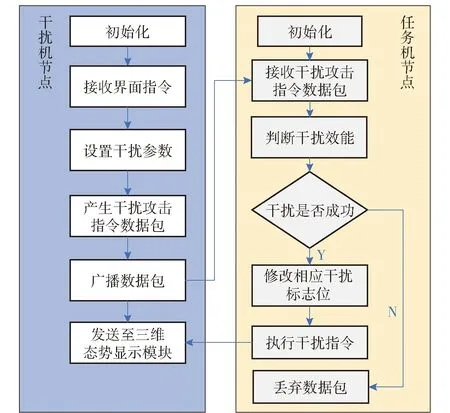
图3 干扰应用模型工作流程
3.1.2 干扰攻击模拟加载界面设计与实现
通过所开发的无人机数据传输接口,干扰攻击模拟加载模块界面可对网络仿真场景中干扰机节点进行干扰参数的获取、显示和修改,可对被干扰攻击节点的航迹进行修改,同时可对场景中节点的通信参数进行获取、显示和修改。干扰攻击模拟加载模块主要是为了模拟实际攻击策略和攻击效果,主要可模拟对任务机的遥测链路干扰、遥控链路干扰和接管控制攻击。
根据功能需求和设计原则,干扰攻击模拟加载模块界面组成如图4所示,可以划分为4个对话框。
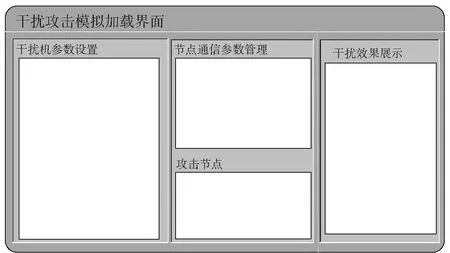
图4 干扰攻击模拟加载模块的界面框架图
各对话框功能如下:
1)干扰机参数设置对话框:功能分为干扰机参数查看和动态修改干扰参数数据两部分。干扰机参数查看功能可向QualNet端请求干扰机节点的干扰参数数据,并在面板上显示,帮助判断是否应该调整某些参数以获得更好的干扰效果;动态修改干扰参数功能可实现为干扰机节点配置新的干扰参数,并发送给QualNet端进行配置。
2)节点通信参数管理对话框:功能分为通信参数查看和动态修改节点通信参数数据两部分。通信参数查看功能可根据节点号向QualNet端请求节点通信参数数据,并在面板上显示;动态修改节点参数数据功能可在对话框中配置选定节点的新的通信参数,发送给QualNet端进行配置。
3)攻击节点管理对话框:功能为选择即将攻击的节点号后重新配置该节点的航迹。实现方法为读入外部已经配置好的航迹文件,然后将节点移动轨迹数据发送到QualNet仿真程序中对该节点预置的运动轨迹进行替换,以达到重新配置节点航迹的效果。
4)干扰效果显示对话框:功能为显示干扰机是否干扰成功,显示当前场景被攻击节点号以及控制状态。
根据干扰攻击模拟加载模块界面的框架图和各个对话框的功能,在Windows10操作系统下使用Visual Studio 2015和Qt 5.0对该模块界面进行了编程实现。干扰攻击模拟加载模块界面效果如图5所示。
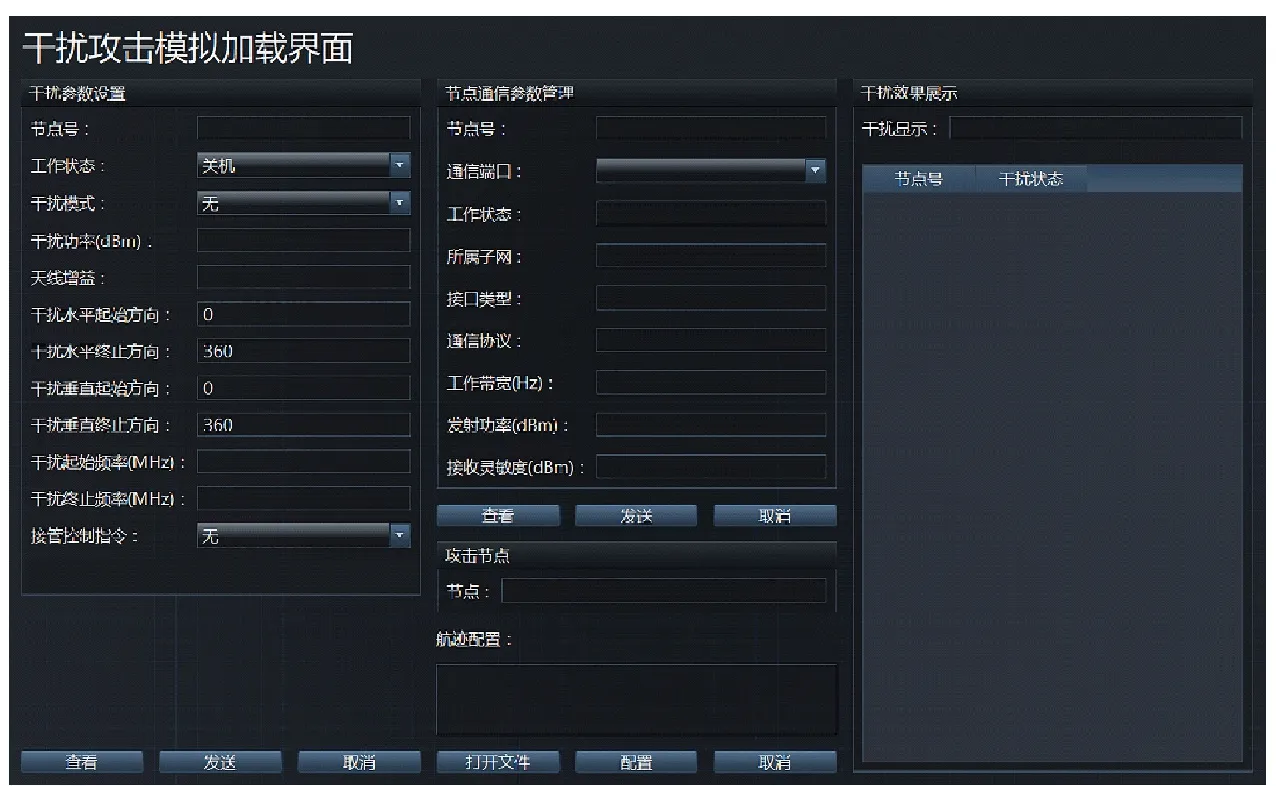
图5 干扰攻击模拟加载模块的界面效果图
3.2 动态控制模块设计
动态控制模块同样主要分为两部分:基于QualNet开发框架的遥控和遥测应用模型与基于Qt应用程序开发框架的动态控制界面。通过遥控、遥测应用和动态控制界面可实现在半实物测试过程中地面站对无人机的实时控制以及对无人机自身遥测信息的实时显示的模拟。
3.2.1 无人机遥控和遥测应用模型设计
无人机遥控应用模型的工作流程如图6所示。遥控应用加载在地面站节点、任务机节点和中继机节点上。在地面站节点上,经过初始化,通过接口获取动态控制界面的指令,将该指令数据包解析重构为遥控指令数据包后在子网内广播。在中继机节点上,经过初始化,接收子网内广播的遥控指令数据包,解析该数据包提取遥控目标类型标志位,并对其进行判断。如果遥控目标为中继机,则执行控制命令,并通过接口将遥控指令数据包重构后发送给三维态势展示界面;如果遥控目标为任务机,则由该中继机节点将数据包转发给任务机节点。在任务机节点上,经过初始化,接收广播的遥控指令数据包,并首先判断是否被接管和遥控干扰。如果被干扰,则丢弃数据包,任务机节点不被控制;如果没有被接管和遥控干扰,则解析该数据包并提取遥控目标类型标志位,对其进行判断。当遥控目标为任务机时,则执行指令,任务机节点被控制,并通过接口将遥控指令发送到三维态势展示界面;否则丢弃该数据包,任务机没有接收到目标为自身的遥控指令。
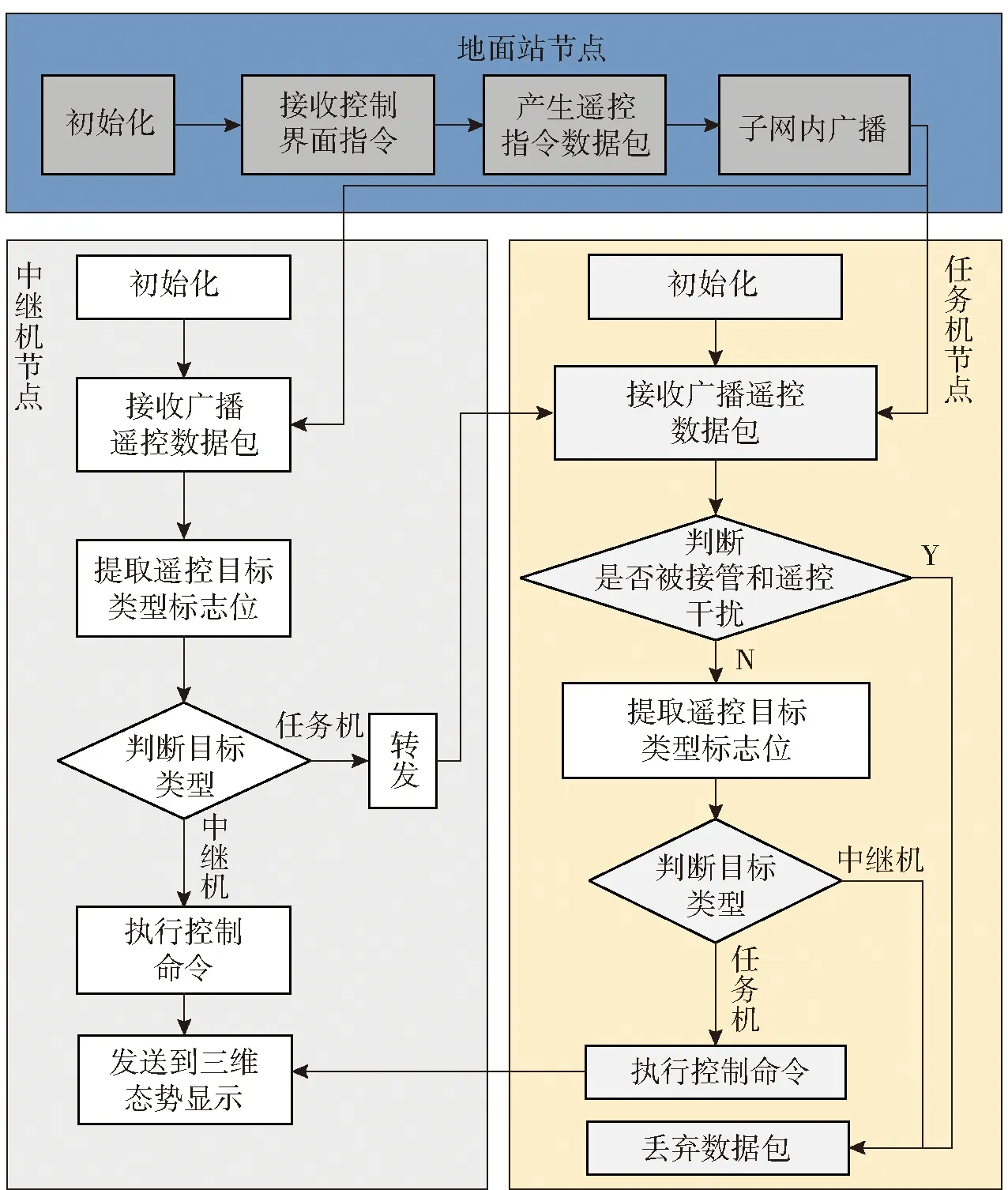
图6 遥控应用模型工作流程
无人机遥测应用模型的工作流程如图7所示。遥测应用模型加载在地面站节点、任务机节点和中继机节点上。在任务机节点上,经过初始化后,周期性产生遥测数据包并广播,并通过接口将遥测数据发送到三维态势展示界面。同样地,在中继机节点上,经过初始化后,周期性产生遥测数据包并广播,并通过接口将数据包发送给三维态势展示界面。同时,接收任务机节点广播的遥测数据包,解析数据包并判断任务机是否被遥测干扰,如果没有被遥测干扰,则将中继转发标志位置为已被中继机转发,再将接收到的遥测数据包广播;否则丢弃该任务机遥测数据包,并将该节点被遥测干扰发送给三维态势展示模块。经过初始化后,地面站节点接收广播的遥测数据包,提取遥测数据包类型标志位进行判断。如果类型为中继机,则通过接口发送到动态控制界面显示;如果类型为任务机,则提取中继转发标志位,判断是否经中继机节点转发,经中继机节点转发的任务机节点遥测数据包通过接口发送到动态控制界面显示,其余数据包丢弃。
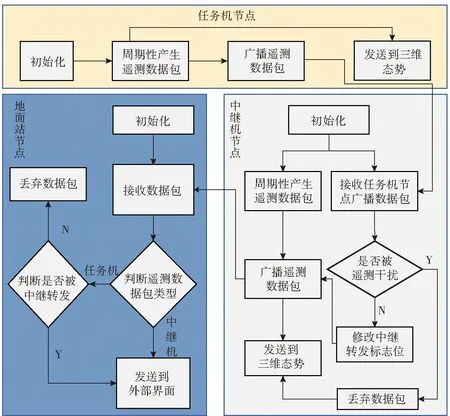
图7 遥测应用模型工作流程
3.2.2 动态控制界面设计与实现
动态控制模块可模拟地面站对目标无人机的实时控制与监视。通过所开发的无人机数据传输接口,动态控制模块可发送控制指令到网络仿真场景中的无人机节点,即任务机和中继机节点。同时动态控制界面可实时接收无人机节点的遥测信息和无人机探测到的目标位置信息。进一步,可获取与显示地面站节点和无人机节点的通信参数。
根据功能需求和设计原则,动态控制模块界面组成如图8所示,可以划分为遥控面板和遥测面板共2个面板,同时包含6个对话框。
各对话框功能如下:
1)无人机控制参数对话框:功能为选择指定的无人机节点,发送无人机的控制指令。实现方法为界面将无人机控制指令数据包发送到QualNet端,QualNet端解析数据包后更改相应节点的运动轨迹,模拟对无人机的控制。无人机控制参数主要包括无人机编号、水平飞行方式和垂直飞行方式等。
2)地面站通信参数:功能为对地面站进行通信参数查看。通信参数查看功能可根据节点号向QualNet端请求节点通信参数数据,并在面板上显示。
3)路径配置对话框:功能为为目标节点重新配置航迹。实现方法为读入外部已经配置好的航迹文件,再将带有节点号的移动轨迹数据发送到QualNet仿真程序中对该节点预置的运动轨迹进行替换,以达到控制无人机飞行轨迹的目的。
4)目标信息展示对话框:功能分为无人机自身状态信息显示和无人机探测目标显示两部分。无人机自身状态信息显示主要为解析接收到的QualNet端返回的无人机信息并显示。无人机探测目标显示功能模拟无人机对周围目标的探测,在雷达图中显示所探测到的目标的大致位置。
5)无人机通信参数对话框:功能为对无人机进行通信参数查看。无人机通信参数查看功能可根据节点号向QualNet端请求节点通信参数数据,并在面板上显示。
6)状态信息打印对话框:功能为显示无人机所有探测到的目标的经纬度、干扰状态和无人机控制状态。
根据动态控制模块界面的框架图和各个对话框的功能,在Windows10操作系统下使用Visual Studio 2015和Qt 5.0对该模块界面进行了编程实现。动态控制模块界面效果如图9所示。

图9 动态控制模块的界面效果图
4 实验与测试
4.1 仿真实验测试场景
按照无人机信息攻击的半实物测试需求,仿真场景中至少包含一个地面站节点、一个任务机节点、一个中继机节点和两个干扰机节点。在实际应用中,数据的传输距离有限,中继机起到在地面站和任务机之间转发遥控数据和遥测数据的作用,这样可以保证数据传输的准确和高效。同时为了确保干扰攻击的范围足够广,在仿真场景中设置了两个有一定距离并且分布在任务机和中继机飞行轨迹两侧的干扰机节点。在仿真过程中,任务机节点、中继机节点和地面站节点之间要进行遥测、遥控信息的交互,组成一个子网;两个干扰机节点组成另一个子网。利用QualNet 12.04设计的无人机仿真场景如图10所示,其中3号节点为地面站节点,1号节点为中继机节点,2号节点为任务机节点,4号和5号节点均为干扰机节点;小红旗代表仿真场景中预设的各节点初始移动轨迹;云朵代表仿真场景中的无线网络。
在想定规划模块中仿真测试采用的想定场景如图11所示,选取内蒙古阿拉善地区作为仿真场景区域。
4.2 功能与性能测试
4.2.1 遥测链路干扰测试
仿真开始后,如图12(a)和图12(b)所示,动态控制界面遥测面板目标信息展示窗口中更新任务机遥测信息,状态信息打印窗口显示探测到的目标信息。同时,如图13所示,三维态势展示界面中显示路径为2号任务机节点-1号中继节点-3号地面站节点的绿色遥测数据线。
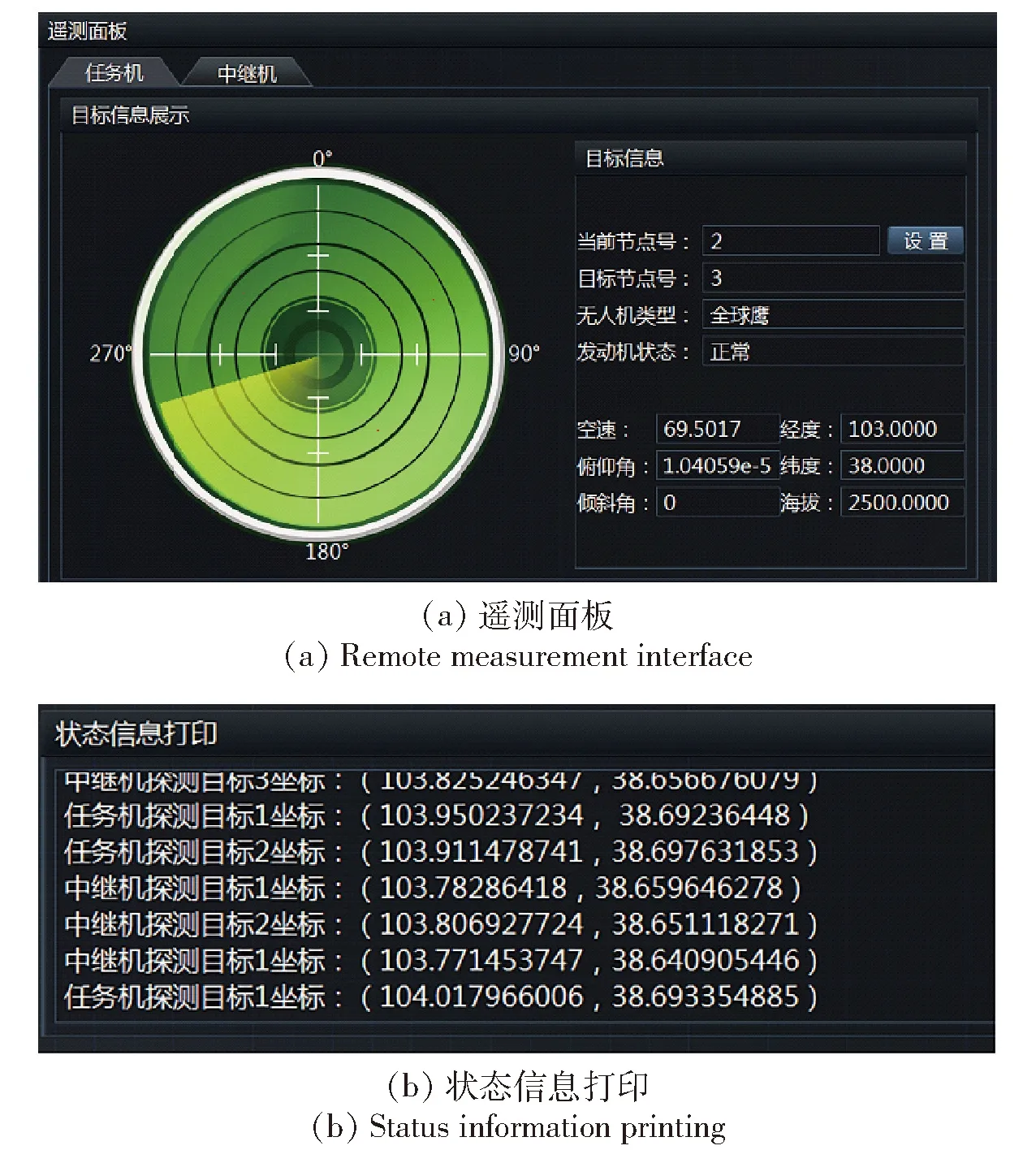
图12 遥测干扰开启前动态控制界面显示
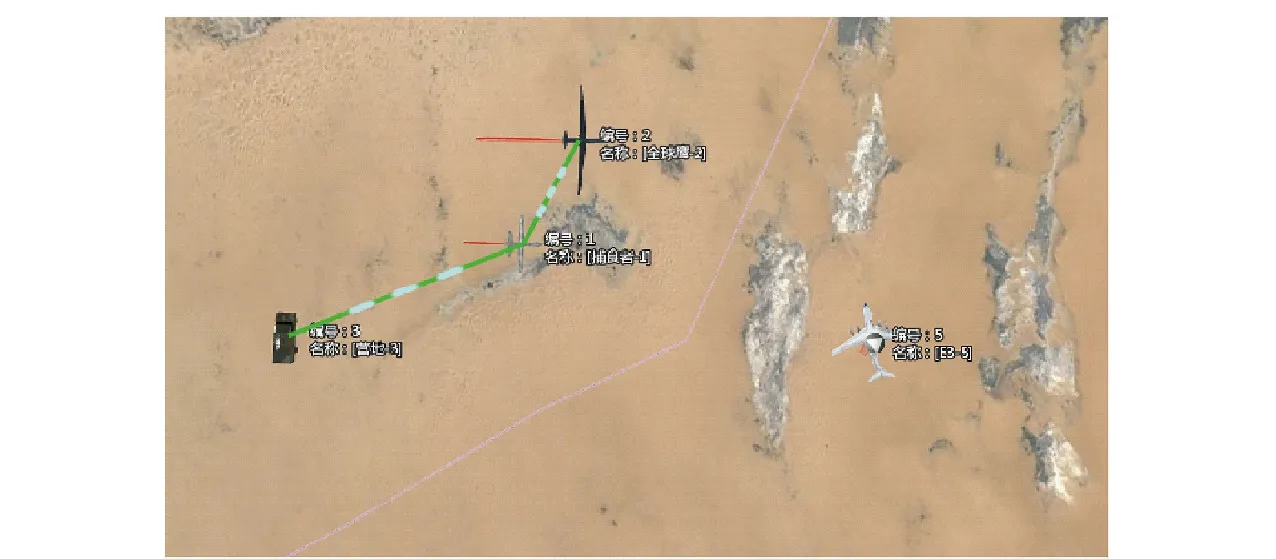
图13 遥测干扰开启前三维态势界面显示
干扰攻击模拟加载模块界面开启遥测干扰,如图14所示。遥测链路干扰启动后,如图15(a)和图15(b) 所示,动态控制界面中的遥测面板不再更新任务机回传的遥测信息,状态信息打印窗口显示遥测干扰,同时三维态势展示界面中红色区域显示干扰节点干扰范围,在干扰范围内的1号中继节点发送给3号地面站节点的绿色遥测数据传输线消失,如图16所示。因此,该测试可以验证在对任务机开启遥测链路干扰后,任务机无法将遥测数据包经中继机转发给地面站节点,即地面站节点失去对任务机的监视能力。

图14 遥测干扰开启
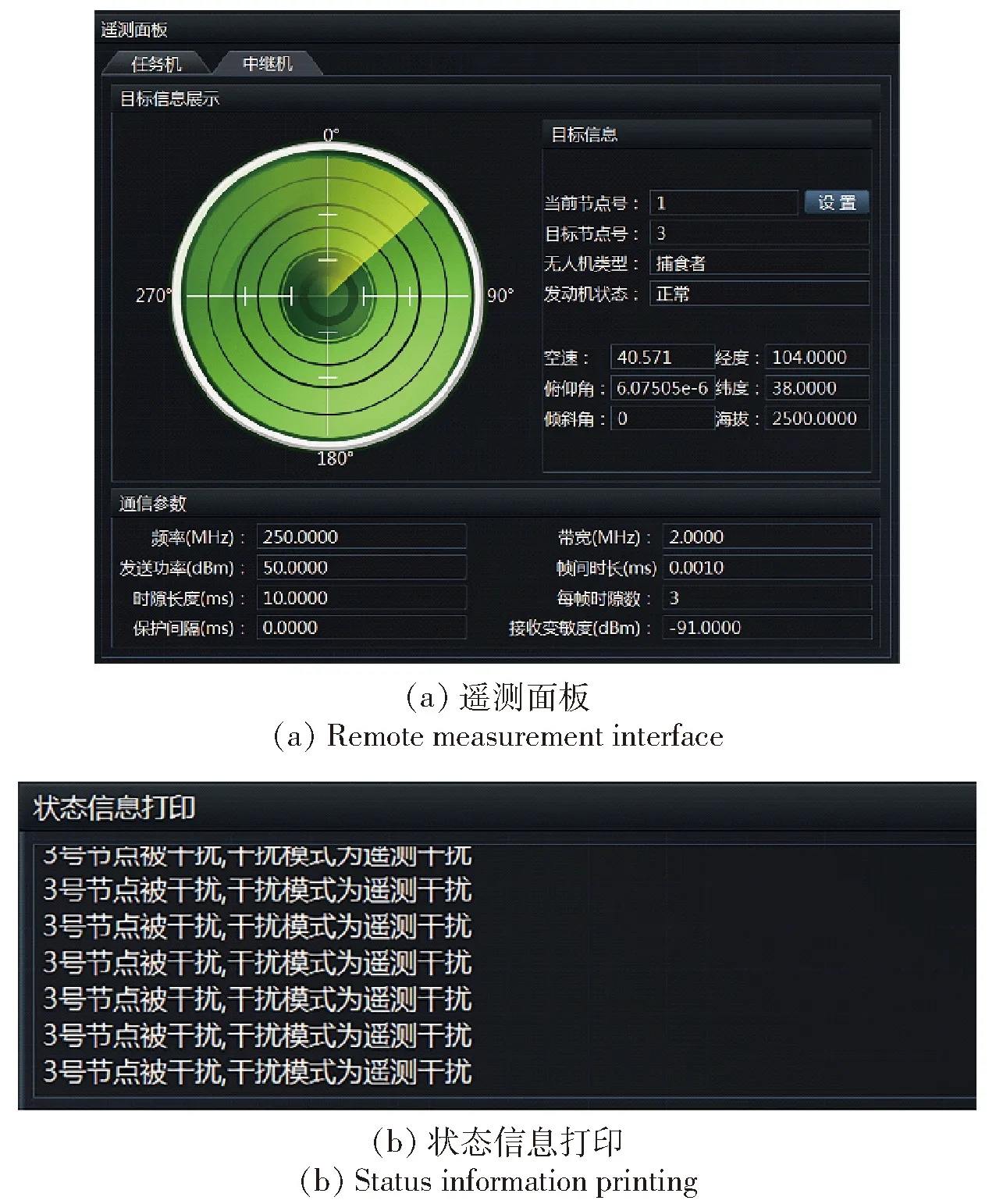
图15 遥测干扰开启后动态控制界面显示
4.2.2 遥控链路干扰测试
在动态控制模块界面的遥控面板向2号任务机发送左盘旋指令,如图17所示,状态信息打印窗口显示对2号任务机节点进行控制。此时,三维态势界面显示红色遥控数据线及任务机节点航迹变化,如图18所示。
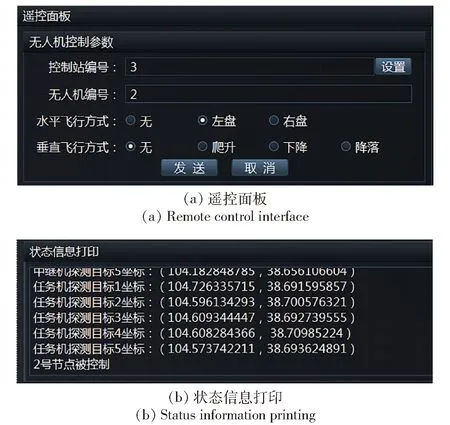
图17 遥控干扰开启前动态控制界面显示

图18 遥控干扰开启前三维态势界面显示
图19为干扰攻击模拟加载模块界面开启遥控干扰。如图20(a)和图20(b)所示,动态控制界面中的状态信息打印窗口显示遥控干扰,同时,向2号任务机节点发送左盘旋指令。三维态势展示界面中红色区域显示干扰节点干扰范围,在干扰范围内的1号中继节点与2号任务机节点间无法产生红色遥控数据传输线,2号任务机节点保持之前的飞行状态不变,即动态控制界面失去对任务机的控制,如图21 所示。因此,该测试可以验证在开启遥控干扰后,动态控制模块失去对任务机的控制,即地面站失去对无人机的实时控制能力。

图19 遥控干扰开启

图20 遥控干扰开启后动态控制界面显示

图21 遥控干扰开启后三维态势界面显示
4.2.3 接管控制攻击测试
干扰攻击模拟加载模块界面开启接管控制攻击并发送左盘旋指令,如图22所示。动态控制界面显示任务机节点被接管控制执行左盘旋指令,如图23所示。三维态势展示界面中红色区域显示干扰节点干扰范围,在干扰范围内的任务机节点航迹发生相应的改变,进行左盘旋飞行,并产生干扰机节点到任务机节点的黄色数据传输线,如图24所示。因此,该测试可以验证干扰攻击模拟加载模块,实现了对任务机接管控制攻击加载的模拟。
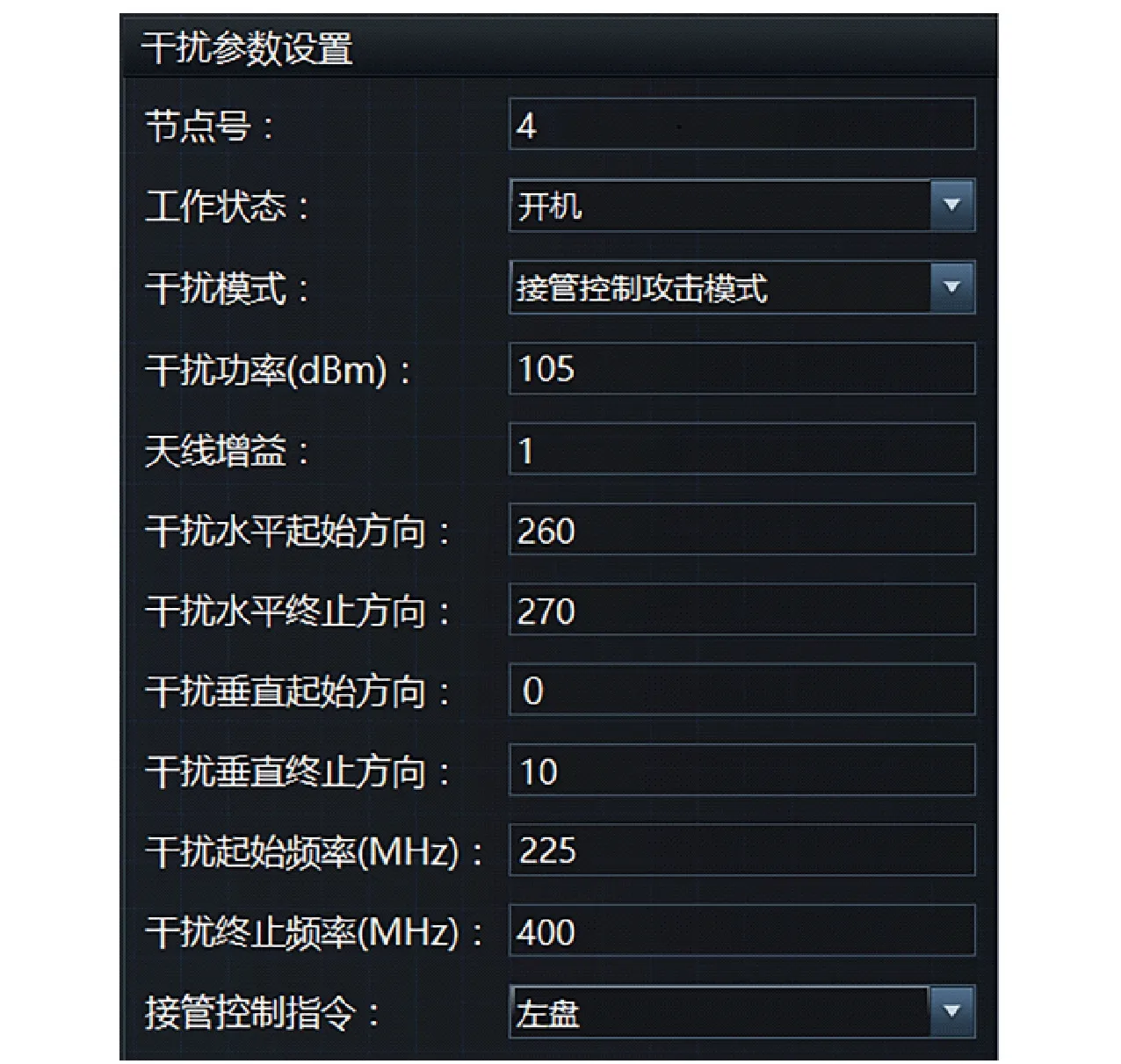
图22 接管控制攻击开启
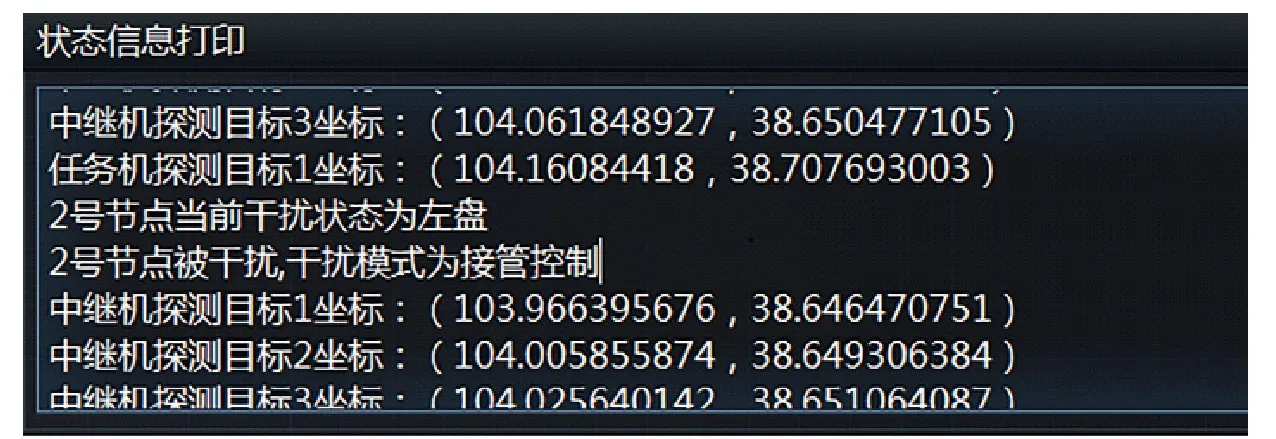
图23 动态控制界面状态信息打印窗口显示
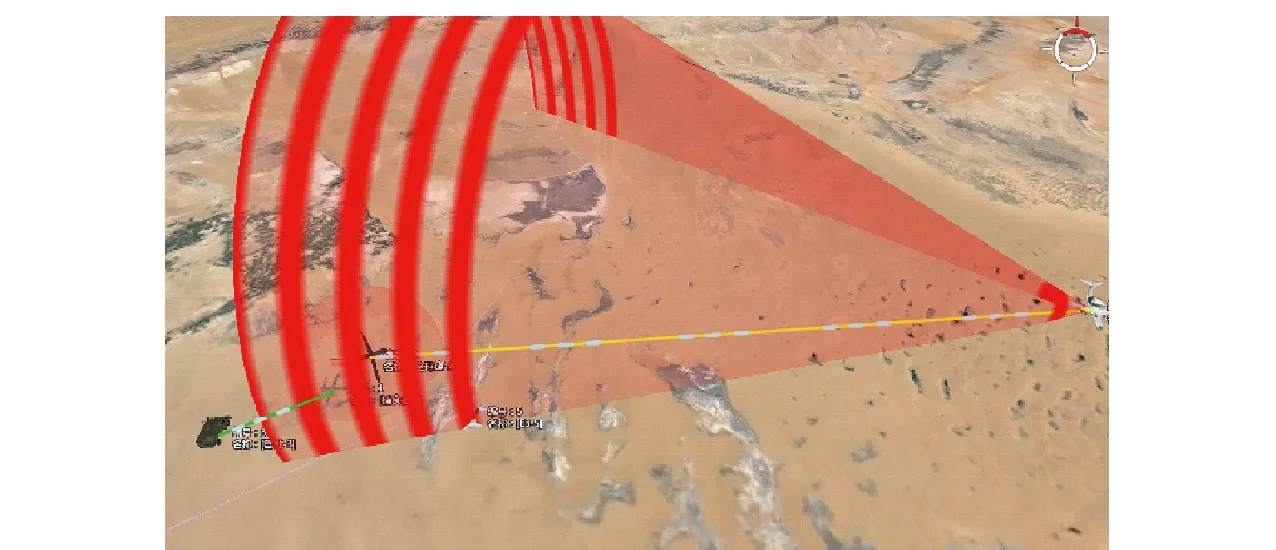
图24 接管控制攻击开启后三维态势界面显示
4.2.4 数据交互接延时测试
无人机数据传输接口的接入延时由四个部分组成:接收数据包的时间、解析和重建数据包的时间、处理事件的时间和发送数据包的时间。为了评估本文提出无人机信息攻击接口的实时性,对接口延时进行了100次测试,结果如图25所示,其平均值为0.785 ms。由图25可知,接口延时为毫秒级别,与数据流量的传输延时相比,可以忽略不计,保证了仿真测试中数据交互的实时性。
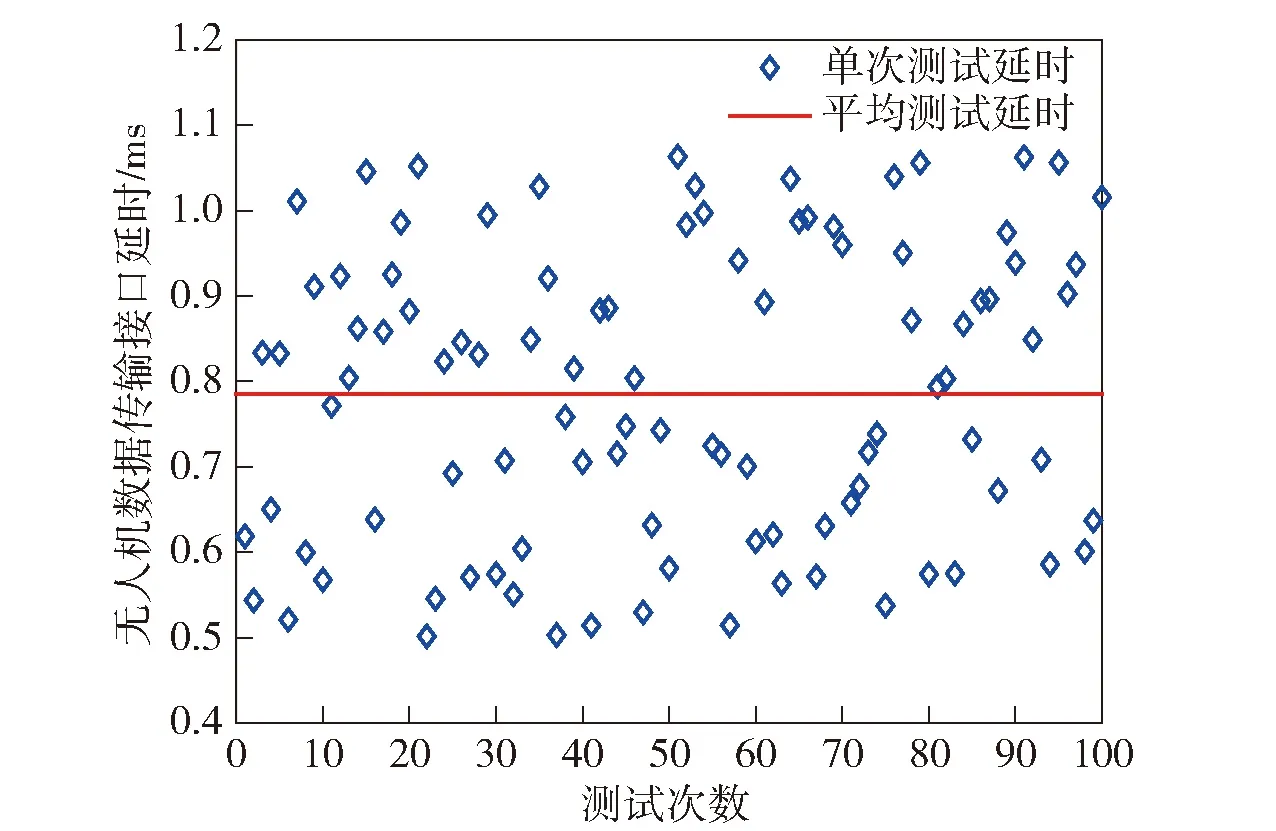
图25 无人机数据传输接口延时测试图
5 结论
本文针对当前无人机及其数据链路干扰攻击相关领域调研了大量国内外文献,在分析当前无人机系统仿真建模存在的不足后,提出了基于QualNet软件的无人机信息攻击半实物测试方法。本文的主要贡献如下:
1)分析了对典型无人机数据链路的信息攻击策略,并基于QualNet网络仿真器提出了一种无人机信息攻击半实物仿真测试架构。
2)设计了无人机数据传输接口,实现外部半实物接入模块与通信网络仿真模块的数据交互及数据的解析与处理。
3)设计了干扰攻击模拟加载模块和动态控制模块,实现了基于指令交互的无人机遥控、遥测和接管控制干扰攻击的实时动态模拟。