有轨电车氢燃料电池混动控制策略研究
2023-10-07彭敏
彭 敏
湖南铁道职业技术学院,湖南 株洲 412001
0 引言
在轨道交通领域,传统车型主要动力来源为接触网供电或通过内燃机发电进行供电,存在能源转型的需求[1]。目前,已经有一部分列车用纯动力电池作为动力源,如株洲电力机车研究所有限公司生产的虚拟轨道列车(ART),在首末站进行快速充电,在运行过程中通过再生制动回收部分能量,续航里程可达到40 km;也有部分车辆采用超级电容作为动力源。又如淮安现代有轨电车利用停站的间隙,在站台30 s内完成充电,续航里程可以达到4 km,以支撑其到达下一个站点。但是,无论是纯动力电池还是超级电容车辆,其单次充电的续航里程都还是偏低,仅适合于短线路里程或短站间距的线路应用场景[2]。
为进一步提高新能源列车的续航里程,拓宽新能源列车的应用场景,本文提出采用氢燃料电池与动力电池混动供电的方案。氢燃料具有无污染、高效率的特点,是真正意义上的绿色动力来源,部分主机厂已经开始探索将氢燃料电池应用于轨道交通车辆[3]。但是,氢燃料电池动态响应较为迟缓,无法直接满足负载端剧烈变化的功率需求。为了避免加速时动力不足的问题,需要采用动力电池进行混合供电。动力电池能够满足负载瞬时变化的需求,还能够有效地回收有轨电车制动过程中产生的制动能量。
氢燃料电池和动力电池的混合动力系统能够满足轨道交通车辆的运行供电需求,更好地响应绿色低碳交通装备的新目标。本文主要结合某型低地板有轨电车的应用需求,提出氢燃料电池和动力电池混动控制架构和控制策略。
1 方案分析
混合动力系统中,氢燃料电池作为主动力源,动力电池作为辅助动力源。氢燃料电池在运行过程中提供持续的功率输出,动力电池在加速启动和制动过程实现削峰填谷作用,以弥补氢燃料电池的动态响应迟缓性,确保系统供电稳定性[4]。
1.1 系统拓扑
以某项目有轨电车为例进行研究,该车辆采用3节编组,“2动1拖”配置。在中间车辆配置1套氢燃料电池动力系统,在两头的车辆各配置1套动力电池,整列车的动力源配置如图1所示,其混合动力系统构型如图2所示。
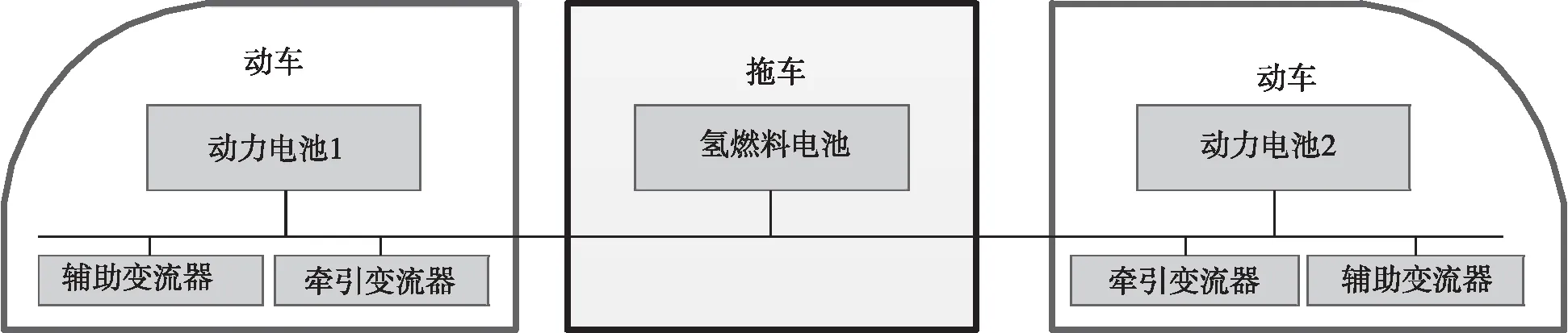
图1 动力源配置
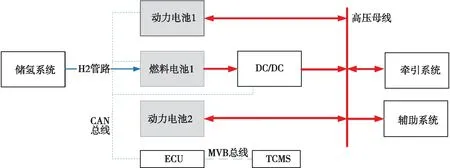
图2 混合动力系统构型
储氢系统:提供压缩氢气,接受能量控制单元(ECU)对其氢气温度、氢气压力、氢气泄露情况进行监视,接受ECU提供的硬线氢阀开闭指令,储氢系统采用70 MPa储氢瓶,总共可储氢30 kg。
燃料电池:将氢气转换为电能,实时发布其输出功率。燃料电池控制单元通过控制器局域网总线(CAN)与ECU相连。燃料电池可接受ECU的调度进行功率输出。单套燃料电池功率输出为200 kW(由2个100 kW电堆组成)。
DC/DC:将燃料电池输出电压转换为牵引和辅助系统所需的工作电压,通过CAN与ECU相连。
动力电池:提供动力电池输出,实时发布动力电池所能允许的最大充放电能力给ECU。动力电池控制单元通过CAN与ECU相连。动力电池的额定输出电压为600 V,额定容量为240 kW·h。支持最大3C的瞬时充电和瞬时放电,以满足急加速和急减速的功率充放需求。
牵引系统:根据ECU提供的动力系统最大的功率输出/吸收能力,发挥合适的牵引/制动力。尤其在制动时,尽量考虑通过动力电池吸收一部分回馈能量。
辅助系统:提供整车辅助负载供电,并实时发布附件消耗功率。
ECU:实现对整个混合动力系统各个设备的监视和控制功能。对氢动力系统以及动力电池输出功率进行分配控制以满足车辆运行所需功率;实现燃料电池的启停控制和功率控制;实时发布动力系统的最大组合允许功率,该值提供给牵引系统,牵引系统的实时功率须低于该值,同时牵引功率增长斜率须低于组合允许功率的斜率增长。
列车控制和管理系统(TCMS):实现整车通信控制。
1.2 整车运行工况
在不同的工况下,燃料电池和动力电池的投入程度也不一样,基于有轨电车运行场景和2种动力源的特性,规划典型的运行工况,如图3所示。
0~10 s:车速为0 km/h,整车处于停车状态,燃料电池输出在一个较低水平保证整车辅件系统能量消耗,动力电池基本不对外进行电流输出。
0~50 s:车速开始由0 km/h提高至50 km/h,燃料电池根据整车需求提高自身输出能力至200 kW左右,此时动力电池开始对外输出电流以满足整车的需求。
50~90 s:车速保持在50 km/h,整车对功率需求下降,燃料电池功率也随之下降,燃料电池和整车的需求基本持平,动力电池基本不对外进行电流输出,如果剩余电量(state of charge,SOC)过低,且整车需求功率小于对应SOC下燃料电池静态输出功率,燃料电池给动力电池充电,尽可能让动力电池拥有合适的电量。
90~130 s:车速由50 km/h减速到0 km/h,整车进行动能回馈,燃料电池功率下降到最低以避免过流,动力电池进行充电将动能回收。
130~140 s:车速为0 km/h,整车处于停车状态,此时燃料电池会根据SOC进行输出给动力电池充电,如果SOC超过65,燃料电池输出在一个较低水平来保证整车辅件系统能量消耗,动力电池基本不对外进行电流输出。
140~280 s:重复之前的工况。
综上,可以看出,在加速阶段,以动力电池为主提供牵引所需瞬时大功率需求;在巡航阶段,以燃料电池为主提供牵引所需稳定的功率;在减速阶段,以动力电池消纳牵引系统反馈的电制动功率。即由氢燃料电池和动力电池共同组成稳定的动力源[5]。

图3 运行工况曲线
2 能量控制方案
能量控制主要是指电源端的氢燃料电池输出控制,以及负载端的牵引或电制动功率限值控制。而动力电池是非受控电源,只能根据外部的负载和电压波动情况,自行进行功率输出或功率输入[6]。
基于上述不同的工况,制定氢燃料混动系统的能量控制方案,如图4所示。
2.1 基本算法
对于整车的系统功率有:Pfuel+Pbat=Pm+Paux
各参数的说明如表1所示。

图4 系统能量流示意图
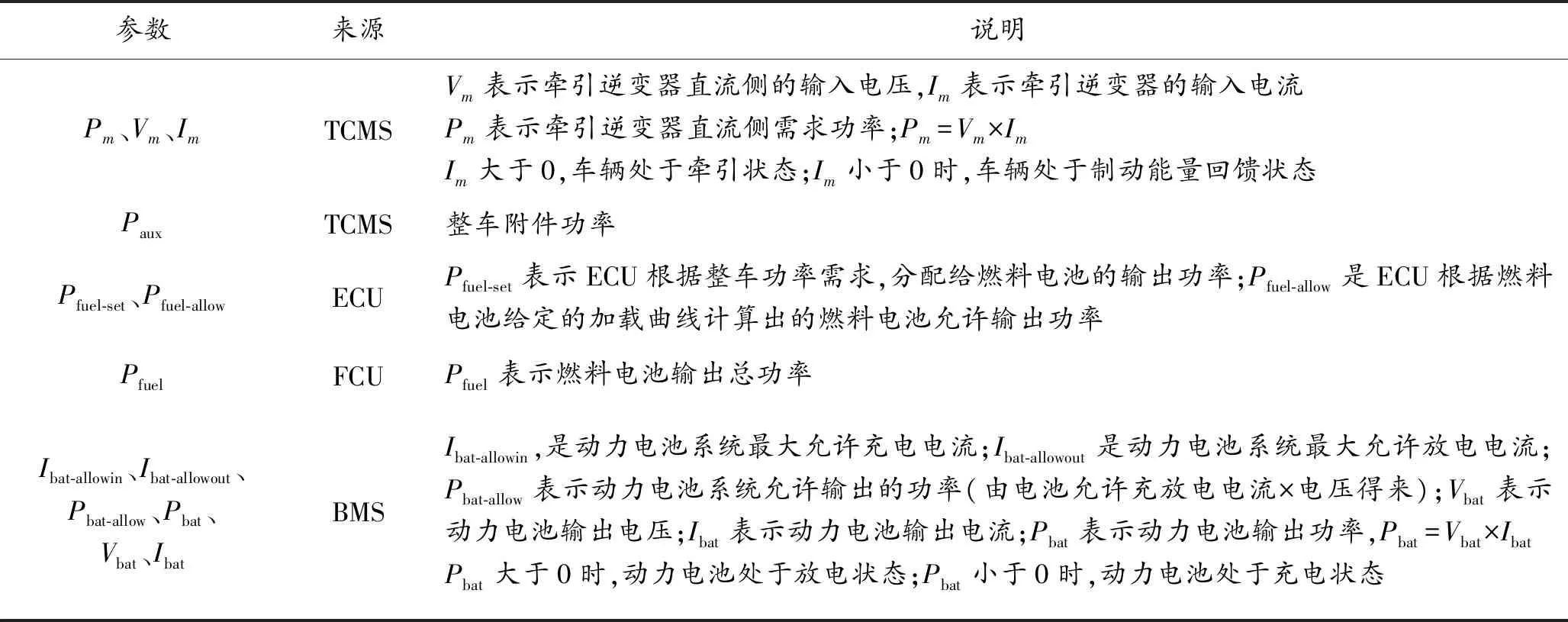
表1 参数说明
2.2 目标功率计算和分配
1)ECU通过TCMS获取牵引需求功率Prequest,其中Prequest=Pm+Paux,Pm根据中间电流和中间电压之积进行计算。
2)ECU通过动力电池管理系统BMS获取动力电池SOC和Pbat-allow;通过TCMS获取车辆速度,并根据速度判断模式(分为动态运行和静态模式)。
3)燃料电池系统包含2个独立的电堆,当2个电堆均正常工作时,平均分配目标功率给2个电堆;当其中一台故障时,将部分或者全部的功率需求转移给另外一台燃料电池。
4)当Prequest小于等于Pfuel-allow时,将Prequest直接赋值给Pfuel-set,作为燃料电池的功率输出进行控制。燃料电池加载过程中,瞬时的功率缺口由动力电池补足。
5)当Prequest大于Pfuel-allow时,将Pfuel-allow赋值给Pfuel-set,即燃料电池按照最大功率进行输出。期间,系统的功率缺口由动力电池补足。
2.3 燃料电池输出功率控制策略
基于车辆独享路权,规律性的加急速、缓加速、匀速、按计划制动等运行工况,采取“跟随运行工况,实施调节”的燃料电池输出控制模式[7]。此时,燃料电池输出主要参考车辆运行状态和电池SOC。其中车辆运行状态包括静态模式、动态模式,动态模式又包括急加速、缓加速、匀速及制动模式。
不同SOC和运行模式下,燃料电池目标功率Pfuel-set的计算策略如表2所示。

表2 车辆正常运行控制策略
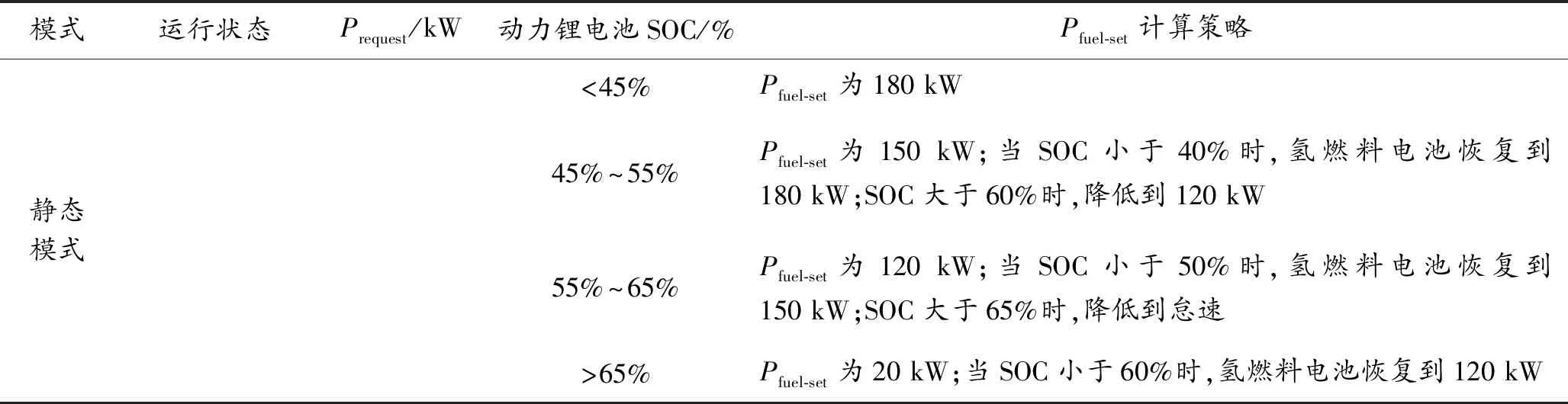
续表
1)任何情况下,调整FCU的输出功率,均须在燃料电池的的升降载曲线包络线内执行。
2)任何模式下,SOC大于85%时,立刻关闭燃料电池。
2.4 燃料电池功率分配策略
1)2套燃料电池正常或报2级、3级故障时,平均分配给2个燃料电池电堆。
2)某单一的电堆报1级故障时,该套FCU无输出,功率全部分配给另外一台燃料电池。
3 能量控制防护策略
采用混合动力系统车辆,为了确保母线电压平稳和各系统正常工作,需要进行相关功率限制。
3.1 牵引工况时牵引功率限制
1)在牵引时,整车功率由燃料电池与动力电池共同提供。此时,整车牵引系统的最大牵引功率须满足:
Pm≤Pfuel+Pbat-allow-Paux=Pfuel+Vbat×Ibat-allowout-Paux
2)在上式中,Pfuel使用2台FCU实时提供的数据之和。Vbat、Ibat-allowout使用BMS通过CAN网络提供的实时数据,而Paux则使用之前TCMS提供的数值。
3)牵引对手柄信号和该牵引功率限制取最小值进行控制,以保证动力电池以及燃料电池处于正常工作状态。
3.2 制动工况电制动功率限制
在制动时,整车功率由燃料电池与牵引系统再生制动回馈的能量共同提供,动力电池和辅助系统负责消耗该能量。此时,各个器件的功率须满足:
Pm≤Pbat-allow+Paux-Pfuel=Vbat×Ibat-allowin+Paux-Pfuel
即通过控制再生制动产生的能量,以保证中间电压不过压,动力电池不过充。
牵引对手柄信号和该制动功率限制取最小值进行电制动控制,若该值不满足整车制动要求,则剩余制动力由气制动补充。
3.3 能量管理优先级
优称级从高到低依次为:各部件安全(如防止电池过充)、整车动力性能、经济性(氢好、寿命)。
3.4 车辆故障运行模式控制
车辆故障运动模式控制如下所示:动力电池、TCMS、燃料电池三者都正常时,正常控制; 动力电池和TCMS正常,燃料电池故障时,车辆以纯电动方式运行,并由网络负责功率和速度限制;动力电池或TCMS故障时,动力电池主接触器断开,车辆无法停止运行。
4 装车测试
基于以上控制算法,进行装车后的测试。
4.1 燃料电池启机测试
燃料电池启机测试(见图5)主要是完成动力系统开机、尝试加载等步骤,测试启动过程时序及耗时。
试验结果表明,开机时序、开机耗时满足混合动力系统设计要求;动力系统可以正常开机,开机过程和怠速状态运行无故障。
4.2 恒定工况运行测试
恒定工况运行测试(见图6)主要是验证燃料电池稳定输出能力,试验规定为(30±5) kW。
试验结果表明,动力系统可以正常开机,并按照恒定的外部负载进行工作,且整个过程无故障。

图5 燃料电池开机测试曲线

图6 恒定工况输出测试
4.3 混动模式输出测试
混动模式输出测试主要测试基于有轨电车典型的运行曲线进行实测运行,下载数据进行分析,运行过程中的有轨电车参数变化如图7所示。
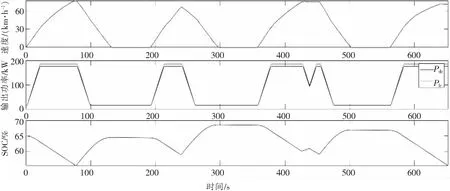
图7 混动模式输出测试
从图7可以看出,运行过程中,燃料电池输出平稳、有规律,恒定工作区间在185 kW左右,居于经济、高效区间。动力电池SOC能够维持在55%~65%,燃料电池和动力电池的输出之和能够满足有轨电车运行所需功率,证明控制策略可行。符合上述整车运行工况的要求。
4.4 燃料电池紧急停机测试
燃料电池紧急停机测试见图8,主要验证燃料电池紧急关机功能。

图8 燃料电池紧急停机测试
如图8所示,燃料电池收到紧急停机指令后紧急停机,100 ms内功率降为零。紧急停机后,断电重启,燃料电池正常启动。
4.5 续航里程测试
在储氢系统加满动力电池情况下,进行了续航里程测试,测试的结果如表4所示。

表4 续航里程测试数据
由表4可知,在满氢满电情况下,续航里程至少达到了290 km,相比纯电池方案提升明显。
4.6 试验总结
本文对混合动力系统的各种典型运用场景进行了验证。结果表明:系统控制方案合理,能够适应外部恒定或变化负载的应用需求,控制过程中各系统均正常运行,尤其是燃料电池工作在经济、高效区间。
采用氢燃料混合动力系统的有轨电车续航里程,相比同编组形式的传统车辆增长5~6倍,能够有效拓宽其应用场景,可纳入更多线路规划时的车辆方案选择。
5 结束语
本文对氢燃料混合动力有轨电车的混动系统方案、控制策略进行了详细阐述,并通过试验对控制策略进行了验证,是轨道交通绿色能源转型的探索和尝试,并为氢燃料电池在轨道交通应用提供了参考。