临近空间飞艇能源昼夜闭环仿真验证系统研究
2023-10-05刘文平宋建青
刘文平,李 钏,刘 硕,宋建青
(中电科能源有限公司,天津 300384)
能源系统是临近空间飞艇最重要的分系统之一,需要为平台有效载荷系统、控制系统等提供昼夜正常工作所需的能源[1]。能源系统由太阳电池阵列、储能电池和能源管理设备构成,其工作原理为:白天由太阳电池阵列采集太阳光产生电能,由能源管理设备进行能量分配,一部分供给艇载设备,另外一部分供给储能电池,对储能电池进行充电;夜间飞艇供电由储能电池完成,并通过能源管理设备实现平台不间断供电。
飞艇在放飞前需要开展全系统不间断模拟工况测试,以确认系统功能性能满足飞行任务要求,其中能源系统的能量平衡为重点测试项目,它可以对能源昼夜闭环仿真进行验证[2]。然而,太阳能飞艇的能量来源是铺设在囊体上的太阳电池阵,由于光照、风速、云层、降水等自然条件不可控[3],在户外条件下难以避免云层遮挡及地面风力的不利影响,加之飞艇太阳阵及相关电源控制设备的庞大规模造成其出入艇库费时费力,因此利用户外自然光照射太阳电池阵供电开展整艇测试显然是难以实现的。而采用人造光源模拟太阳光在室内照射太阳阵的测试方式也不可行,主要原因在于当前相关发光设备的技术水平尚无法维持长时间高功率输出和足够大的光照面积[4]。
本文研究一种临近空间飞艇能源昼夜闭环仿真验证系统,包括仿真系统和验证系统两部分。对实际的飞艇能源系统进行仿真模拟,并且通过半实物验证系统进行验证,这样既省去了大面积铺装太阳电池阵的麻烦,也能对真实的能源系统进行评估和验证,并且负载随意可调,可验证各种工况[5]。
1 仿真系统
仿真系统包括发电计算模块、储能计算模块和预测评估模块。其中,发电计算模块是通过飞艇飞行参数计算出阳光和太阳电池的夹角,再通过该夹角计算出辐照度,再结合太阳电池参数计算出太阳电池发电功率和总发电量。储能计算模块是根据发电情况和负载情况计算出能量盈亏,再结合储能电池当前剩余电量计算未来24 h 储能电池电量剩余情况。预测评估模块是根据上述计算结果进行分析判断,对飞艇能源系统进行预测评估,判断是否能够昼夜闭环运行。本文通过在线预测评估,为长航时飞艇的能源昼夜平衡提供数据支撑,助力飞艇的长时间飞行,更好地完成飞行任务。
1.1 发电计算模块
1.1.1 阳光和太阳电池夹角计算
计算太阳光线和太阳电池片的夹角,首先要根据时间和经纬度、海拔高度,计算得到某个仿真时刻在地理坐标系中的阳光矢量;而后根据飞艇的三个姿态角,将其变换至飞艇的本体坐标系中。
调用商业航天软件STK 可完成上述处理。具体方法是在STK 中创建飞艇模型,并指定其位置(经纬度、海拔),以当地地理坐标系(北东地)为基准根据飞艇飞行姿态(航向、俯仰、滚动)旋转其本体坐标系(前右下),再以飞艇本体坐标系为基准根据太阳电池的安装角(为贴合囊体产生的角度)旋转太阳电池坐标系。最后调用Report 模块,即可得到阳光与太阳电池片法线(即太阳电池片坐标系的-Z方向)的夹角。
1.1.2 太阳电池阵发电量计算
通过以下公式可以计算单体电池片的辐照度。
式中:S为辐照度;S0为太阳常数,随高度变化而变化,例如在20 000 m 平流层,S0=1.2 kW/m2;α 为阳光与太阳电池片法线的夹角。
则单体太阳电池片的发电功率可以通过辐照度乘以单体面积计算得出,太阳电池阵的发电功率等于全部单体太阳电池片的功率总和。
则太阳电池的发电量为:
太阳电池阵是由太阳电池单体经过串并联构成的。太阳能无人飞艇太阳电池的铺装特点是一串电池中的各单体与阳光的夹角可能存在不一致的情况,即不同“排”间的单体电池进行了串联。出现此种情况时,整串电池的电流会受到输出电流最小的单体电池钳位,无法做到每片电池都处于最佳工作点。为了减小计算量,本系统不再分别计算电池串中除最小功率单体外的每片电池的非最佳工作点输出功率,直接采用最小功率单体的输出功率作为该串各电池的输出功率,乘以串联数即可得到该串电池的输出功率。将各串电池的输出功率相加可得出整个太阳电池阵的输出总功率。
1.2 储能计算模块
储能电池的充电功率可以根据以下公式计算:
式中:P充电为储能电池的充电功率;P发电为太阳电池阵的发电功率;P负载为负载用电功率;η1为母线效率;η2为MPPT 效率;η3为充电效率。
当太阳电池阵输出的功率大于负载用电功率时,剩余的能量将为储能电池充电;当太阳电池阵输出功率不足以满足负载用电功率时,P充电为负值,储能电池将放电,则η3为放电效率。充放电的累计影响储能电池的当前能量。其中,充电功率最大不可超过“储能电池能量×最大充电倍率”,放电功率最大不可超过“储能电池能量×最大放电倍率”。
因此,当P充电>0 时,有:
式中:E为当前能量;E0为上一时刻能量;Min()为取最小值;t为充电时间;Emax为储能电池最大容量;Cmax为最大充电倍率。
因此,当P充电<0 时,有:
式中:P放电=-P充电;E为当前能量;E0为上一时刻能量;Min()为取最小值;t为放电时间;Emax为储能电池最大容量;Cmax为最大放电倍率。
1.3 预测评估模块
根据发电计算模块和储能计算模块的计算结果,结合遥测数据,对临近空间长航时太阳能无人飞艇进行预测评估。
首先,获取当前时刻MPPT 控制器的输出电压、电流遥测数据,根据该遥测数据计算出实际总发电功率,根据当前时刻实际和理论总发电功率计算系数K。
根据系数K预测未来24 h 的发电曲线,即认为K随着时间的变化基本保持不变,采用K对发电计算模块中的结果进行校正,计算得出未来24 h 不同时刻的发电功率,绘制发电功率曲线。
获取当前时刻负载、储能电池的电压、电流遥测数据,根据当前时刻发电、用电、储能情况计算出系统效率η。
根据效率η 预测未来24 h 的储能曲线,即认为η 随着时间的变化基本保持不变,采用η 对储能计算模块中的结果进行校正,计算得出未来24 h 不同时刻的储能电量,绘制储能曲线。
判断储能电池电量是否会放空,如果储能曲线的电量最低点大于0 则证明储能电池至少能维持24 h,继续判断24 h后的电量是否不低于初始电量,如果也满足该条件则证明飞艇能源系统能够昼夜闭环运行,否则不能闭环运行。预测出结果后在界面上进行提示,给出合理化建议,让飞艇地面站判断是否需要对飞艇的飞行进行相应的调整。
以上程序流程图如图1 所示。
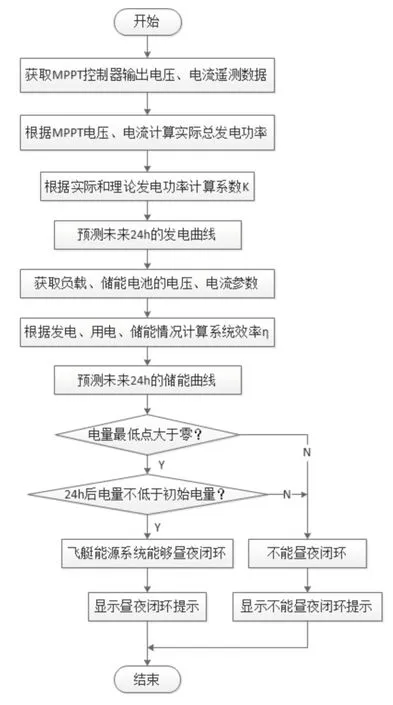
图1 临近空间飞艇能源系统预测评估程序流程
2 半实物验证系统
2.1 总体架构
如图2 所示,本系统由太阳电池模拟器、MPPT 控制器、储能电池、DC-DC 配电器、电子负载、交换机和监控计算机组成。

图2 系统框图
在本系统中,储能电池、MPPT 控制器和DC-DC 配电器为飞艇实际使用的设备,太阳电池模拟器和电子负载为模拟实际太阳电池发电和飞艇实际用电设备,用于验证飞艇的能源昼夜闭环,所以称为半实物验证系统。
太阳电池模拟器用于模拟太阳电池阵发电,MPPT 控制器用于跟踪所述太阳电池阵最大功率点,储能电池用于储存电能,DC-DC 配电器用于系统稳压配电。电子负载用于模拟飞艇用电负载,交换机用于组建局域通信网,监控计算机用于监控能源系统。
系统中太阳电池模拟器由三相380 V 交流电源供电,电子负载、交换机和监控计算机由单相220 V 交流电源供电。MPPT 控制器的输入直流电压范围为350~400 V,输出直流电压范围为400~500 V,最大功率为5 kW,最大输入电流为15 A,最大输出电流为12.5 A,效率大于等于95%。储能电池的额定容量为9.9 Ah,工作电压为300~504 V。DC-DC 配电器的输入直流电压为400~500 V,最大功率为5 kW,最大输入电流为13 A,最大输出电流为11.5 A。
2.2 太阳电池模拟
本系统采用太阳电池模拟器模拟太阳电池阵发电,采用数字式太阳电池模拟器模拟各子阵,以太阳电池的数学建模为基础,利用数字信号处理器控制电力电子变换装置,根据精准的控制算法不断调节主电路的工作状态,使模拟器的输出性能与真实的太阳电池阵输出性能相符合。图3 为数字式太阳电池模拟器的原理框图。
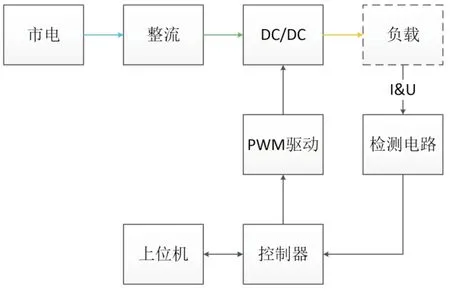
图3 太阳电池模拟器原理框图
太阳电池模拟器能模拟出真实的太阳电池阵输出性能,太阳电池模拟器的输出电压和电流在I-V 坐标系所对应的点应落在太阳电池I-V 特性曲线上。这个点即为负载曲线与太阳电池输出曲线的交点,称为模拟器的目标工作点。众所周知,太阳电池输出特性具有非线性,易受光照强度和环境温度的影响,而且系统在实际应用中会经常切换负载,在飞艇系统测试过程中I-V 特性曲线也在实时变化,这些都会导致太阳模拟器目标工作点的变化。图4(a)中的点A、B、C 分别为环境条件一定,不同负载Ra、Rb、Rc所对应的目标工作点;图4(b)中的点L1、L2、L3分别为系统负载一定,外界环境条件变化所对应的目标工作点。评价模拟器性能优劣最重要的指标之一即是系统追踪到目标工作点的速度、准确性和稳定性。

图4 太阳电池模拟器工作目标点
从上述分析中可知,太阳电池模拟器实质上是一种DCDC 变换电路,它将一种直流电源变化为另一种不同特性输出的直流电源,以实现对太阳电池输出特性的模拟。
2.3 最大功率点跟踪
当前所有型号的太阳能飞艇能源系统均采用了最大功率点跟踪(MPPT)技术,以实现太阳电池阵发电能力利用率的最大化。MPPT 是由DC-DC 变换电路(下文称为MPPT 控制器)实现的,太阳电池阵列与负载通过MPPT 控制器连接,其工作原理是检测主回路直流电压及输出电流,计算出太阳能阵列的输出功率,并实现对最大功率点的追踪。图5 为最大功率点跟踪过程示意图。

图5 MPPT原理示意图
可见与数字式太阳电池阵列模拟器类似,本系统的直接测试对象——MPPT 控制器,本质上也是一种DC 变换器。在MPPT 控制器进行上下扰动时,太阳电池模拟器必须随着扰动快速并且准确地跟踪到目标的工作点,才能使MPPT 控制器正确地测量到扰动后的电压电流值,保证调节方向正确,最终达到最大功率输出。
2.4 DC-DC 变换器原理
(1)DC-DC 变换电路
DC-DC 的作用是为负载提供稳定的供电,它可以在400~500 V 输入电压范围条件下输出稳定的450 和28 V,其中450 V 负载最大功率5 kW,28 V 负载最大功率100 W。
DC/DC 转换器本身具有较宽的输入电压范围,输入输出端隔离,输出过压保护,过热关断,输出电压调节,而且元件数量少,应力低,热阻抗小。DC/DC 转换器本身具有完善的保护功能,再加以外部的滤波电路,可以有效、可靠地保证电源的输出品质。
(2)信号变换电路
DC-DC 信号变换电路负责能源管理器内各部分工作状态模拟量信号的采集及变换,并将每路需采集的信号变换为适合TM/TC 输入的电压信号,传入TM/TC。
电压信号采集变换按照数字信号地或模拟信号地应与推进电源地相互隔离的要求,均采用隔离方式进行采集变换。
推进母线电压信号选用光电耦合器作为隔离变换器件,信号隔离变换后生成共地信号经放大电路变换为均符合TM/TC 信号输入范围的电压信号,原理框图见图6。

图6 隔离电压信号变换原理框图
2.5 负载模拟
本系统的负载采用电子负载模拟。电子负载的原理是控制内部功率场效应管或晶体管的导通量,靠功率管的耗散功率从而消耗电能,它能够准确地检测出负载电压,从而调整负载电流。电子负载可以模拟出真实环境中的载荷,它有恒流(CC)、恒阻(CR)、恒压(CV)、恒功率(CP)功能。本系统可根据负载类型控制电子负载工作在CC、CR、CV、CP 模式。
3 仿真运行与数据分析
在仿真软件中输入某太阳电池阵的单片电池参数、电池片数量、仿真时间、仿真纬度、经度、高度、蓄电池总能量、初始能量以及负载功率等参数,即可生成发电-用电-储电仿真数据。能源昼夜闭环仿真输入数据为:仿真开始时间2021-06-21 0:00,仿真结束时间2021-06-21 23:50,电池片工作点电压0.627 V,电池片开路电压0.735 V,电池片工作点电流2.75 A,电池片短路电流3.008 A,纬度42°,经度87°,高度为20 000 m,电池片数量为2 448 片,蓄电池能量3 600 Wh,初始能量3 600 Wh。负载功率为:0:00—6:50 负载功率323 W,7:00—8:50负载功率1 083 W,9:00—9:50 负载功率323 W,10:00—19:50 负载功率3 000 W,20:00—23:50 负载功率323 W。图7为临近空间飞艇能源昼夜闭环仿真曲线。

图7 临近空间飞艇能源昼夜闭环仿真曲线
将仿真结果输入能源昼夜闭环仿真验证系统中,记录发电功率和蓄电池剩余能量数据,生成系统实际运行曲线图,从曲线的符合度表明,运行结果与仿真结果基本一致。图8为系统实际运行曲线。

图8 系统实际运行曲线
4 结论
本文通过一种临近空间飞艇能源昼夜闭环仿真验证系统研究,对仿真软件和半实物验证系统进行了设计,通过仿真系统和半实物验证系统,可以对真实的能源系统进行评估和验证,这样省去了大面积铺装太阳电池阵的麻烦。通过仿真模拟和系统测试,验证了系统的有效性。
