基于数字孪生技术的智能汽车测试分析
2023-09-23解树彬
解树彬

关键词:智能汽车;数字孪生;验证测试;虚拟场景
0引言
近年来,基于数字孪生的智能汽车测试目前正得到研究者们的高度关注。数字孪生测试能够将物理模型和传感器虚拟数据在孪生空间中实现实时映射,是仿真空间与现实空间的沟通桥梁。SelimSolmaz等通过数字孪生混合测试,结合模拟和真实测试的优点,在欧盟INFRAMIX项目中已得到应用,对智能车轨迹规划算法进行了测试评估[1]。清华大学李力副教授等运用数字孪生平行测试系统实现了更具挑战性的测试,从而加速自动驾驶车辆的评估和开发[2]。ZsoltSzalay等运用数字孪生测试方法,通过5G蜂窝移动技术,在匈牙利M86公路和ZalaZONE试验场进行了试验测试,表明了测试方法的可行性和有效性[3]。Warkev等对数字孪生的演变和背景及优点进行了详细介绍,表明了借助数字孪生技术可大大减小人为错误的可能性[4]。AlexanderBarbie等借助数字孪生方法部署了一个海洋观测系统协作水下网络[5]。SamirKhan等从需求的角度探讨了数字孪生作为决策工具的必要性[6]。還有一些专家、学者通过设计了数字孪生支持框架,提出基于信息融合和系统逻辑库的生成方法来提升框架的配置性能[7-9]。
综上,本文提出了一种基于数字孪生的智能汽车测试总体框架,实现了测试系统的硬件与软件部分的合理匹配。同时,该研究通过实际典型案例分析,对所提出的测试系统的有效性进行了相应的验证。
1数字孪生测试系统框架
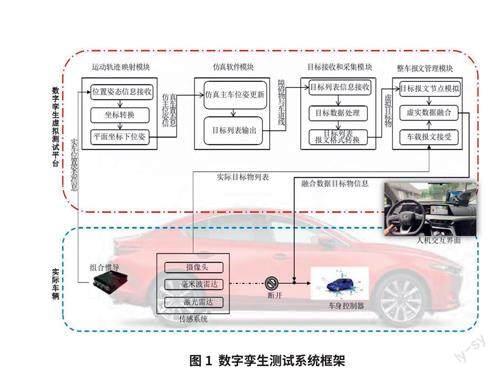
数字孪生测试系统主要包括实际车辆和虚拟测试平台两个部分。实际车辆为具备智能驾驶功能的实际被测对象,虚拟测试平台包括虚拟道路环境和传感器模型等,传感器将探测到的虚拟目标信息发送给搭载智能驾驶功能的真实被测车辆,为真实车辆进行信息融合与决策控制提供基础。真实车辆在试验场地进行测试,与此同时,被测车辆的运动状态信息同步反馈给虚拟场景,从而完成虚、实状态的同步,实现整个数字孪生系统的闭环实时仿真测试。测试系统由4个核心模块组成:仿真软件模块;目标接收和采集模块;整车报文管理模块;运动轨迹映射模块。通过这4个模块与实车端相连接,从而构建起整个数字孪生测试平台。
系统在运行过程中,首先借助仿真软件模块生成所需开发测试的虚拟场景,并在仿真软件中建立多种虚拟传感器模型,将虚拟传感器探测到的目标信息通过总线的形式注入到实车上的控制器中,为实车进行信息融合与控制决策提供输入。接着,实车控制器将决策后的加速、制动以及转向指令发送给实际执行器,同时通过组合惯导将实车车身姿态和车辆位置等状态信息同步反馈给虚拟场景,完成实车在仿真场景中的姿态位置信息映射,进而实现整个系统的闭环实时仿真。在此期间,运动轨迹映射模块不间断地采集实车运动的经纬度和姿态信息,基于亚尔勃斯(Albers)投影方法将实车经纬度坐标转换为笛卡尔坐标,并基于地图匹配及卡尔曼滤波相结合的方法实现将现实世界映射到仿真场景中,从而达到车辆位置和姿态在虚拟世界与现实世界的同步,确保完成整个数字孪生测试平台的搭建与正常运行(图1)。
2数字孪生系统构建技术
数字孪生测试系统将替代实车上的真实传感器向实车控制器发送检测到的虚拟障碍物信息,以达到测试实车控制器功能表现目的。本文中数字孪生测试系统实现主要包括平台构建及关键技术、平台软件系统构建、平台硬件系统构建与时间同步软硬件设计4个部分。
2.1系统构建关键技术
2.1.1基于亚尔勃斯(Albers)的位置映射方法
运动轨迹映射模块功能之一是不间断地采集实车运动的经纬度信息并映射到虚拟环境系统中。由于经纬度信息采用地理坐标系(GeographicCoordinateSystem),而虚拟环境系统采用笛卡尔坐标系,故需采用一种投影方法将实车的经纬度信息转换为笛卡尔坐标系中的三维坐标信息,从而实现将实车的运动轨迹映射到仿真场景中。
亚尔勃斯(Albers)投影是正轴圆锥投影,投影的各经线是向一点收敛的直线,直线间的夹角与相应的经度差成比例,各纬线是以收敛点为圆心的同心圆弧。因此在构置图网时可以采用极坐标算法。其计算公式如下。
式中,δ为极角;ρ为经纬度的展开半径;λ为经度差;α为按照等体积条件求取的投影常数,与2条标准纬线的纬度有关;R则是与地球椭球体等面积的球体半径,其近似值为R≈6378137m。
2.1.2基于卡尔曼滤波的位姿高精度优化技术
运动轨迹映射模块的另一功能,是通过组合惯导采集实车运动的姿态信息并映射到虚拟环境系统中。当车辆姿态发生变化时,由于车辆姿态的变化频率大于采样频率,因此会导致虚拟仿真系统接收到的信息延迟。同时,由于组合惯导采集的信息为车辆的局部姿态信息,该信息与车辆整体的姿态信息存在差异,不能够很好地反映整车实际的运动状态。因此采用基于卡尔曼滤波的位姿高精度优化技术来提高车辆运动姿态映射的精度。
基于卡尔曼滤波的位姿高精度优化技术的核心在于不同信息源的融合,因此将卡尔曼滤波应用于位姿高精度优化技术中,就是将虚拟与现实姿态信息综合用于姿态预测。通过卡尔曼滤波不断修正空间中被测车辆的姿态信息,将滤波之后的姿态信息输入至虚拟环境中,从而使得映射到虚拟环境中的车辆运动姿态信息精度更高,运动轨迹更加平滑。
2.2平台软件系统构建
2.2.1虚拟外部环境
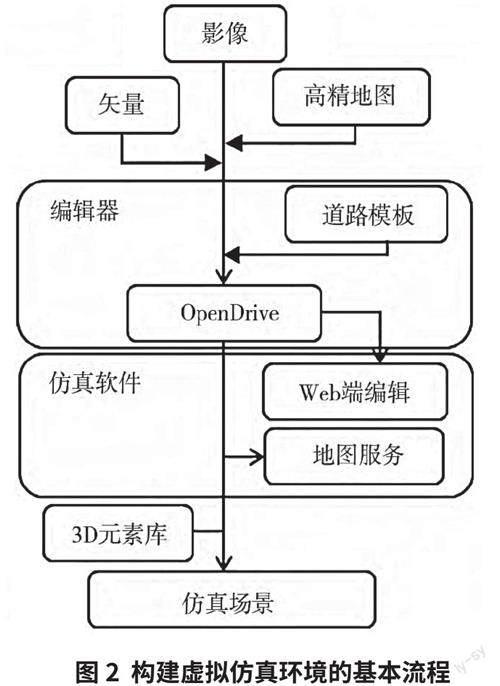
数字孪生测试的首要前提是建立起虚拟的外部测试环境。本文利用多功能虚拟仿真系统51SimOne来实现外部虚拟环境的建模。该仿真系统提供了2种仿真三维场景的能力。一种是通过多种方式创建、导入或编辑高精地图,添加必要的交通设施和建筑物等物体的描述,在运行时调用相关三维模型资源可以自动生成虚拟仿真场景。另一种是针对具体的测试场景,采用测绘数据建立或虚拟编辑的方式创建高精地图,并基于地图自动生成、结合人工建模的方式创建高真实感的虚拟仿真场景。构建虚拟仿真环境的基本流程如图2所示。
2.2.2车辆与传感器
该仿真系统提供了基于Web的3D主车编辑器,方便配置主车模型。可以将自定义的主车模型导入仿真系统,以便使用该主车模型进行交互式的车辆配置。
传感器支持的种类包括摄像头、毫米波雷达、激光雷达、超声波雷达、GPS/IMU和理想传感器等,并实时观察传感器的覆盖范围。系统可通过交互式的方式进行多传感器的添加、位置调整和参数设置,也支持自传感器定义参数化扩展。输出包括主车的位置、朝向、速度、加速度和角速度,以及所有目标障碍物的相对位置、朝向、大小、相对速度及2D包围盒等信息。
其中,摄像头仿真的基本参数包括摄像头的外参、内参和畸变参数。上述参数会在内部转换为投影矩阵,保证全局坐标系—相机坐标系—图像坐标系—像素坐标系整个过程的正确转换,并输出与真实相机效果一致的图像。毫米波雷达模型基于毫米波雷达原理的射线追踪,并对回波作数字信号处理。理想传感器可以模拟完美传感器,返回主车一定范围内探测到的障碍物机动车、行人和非机动车,支持按一定比例剔除有遮挡的障礙物。返回数据包括障碍物位置、朝向、凸包、包围盒、速度、加速度和角速度等。
2.3平台硬件系统构建
数字孪生测试系统作为一套与实车进行高度匹配的联合仿真系统,对实时性有较高要求。因此,需要保证硬件资源足够,即CPU和GPU性能要求较高。硬件系统主要包括上位机(PC、工控机等)、组合惯导采集系统(如VBOX等)以及通信板卡等。
数字孪生测试系统主要在上位机中运行,上位机含有丰富的外设接口,各硬件设备均能在车载工况下稳定运行。组合惯导数据采集系统实时、准确地计算记录实际车辆的姿态和位置信息,同时,将上述信息同步映射到仿真软件里的主车上,达到将实车映射到虚拟场景的目的。此外,PC机还通过USB2.0端口连接USBCANFD接口卡,从而能与CAN(FD)网络进行数据收发,构成CAN(FD)-bus控制节点。
2.4软硬件时间同步设计
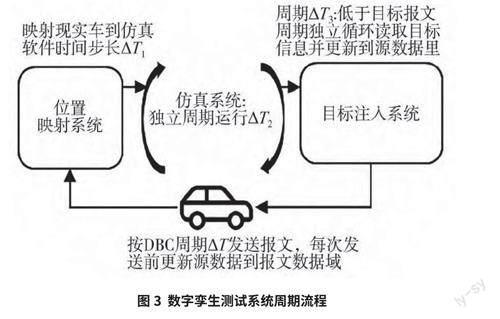
数字孪生测试系统的同步主要由位姿映射系统、仿真软件及目标注入系统3个部分来完成,各系统采用独立的进程,以达到各个系统解耦及运行时间的独立性。首先,位姿映射系统采用独立进程映射实车测试的位置和姿态信息到仿真软件中,其运行周期为ΔT1。其后,仿真软件进程需以其最低运行周期工作ΔT2,并输出计算后的环境信息;最后,虚拟目标注入系统则采用低于车辆报文周期ΔT的时间步长ΔT3,循环获取来自仿真软件的目标信息并更新到源数据当中,同时使用独立的线程,按照测试车辆的报文周期更新报文。数字孪生测试系统测试周期流程如图3所示。
3系统有效性验证
为验证系统的有效性,本文通过选用典型的驾驶辅助功能自适应巡航控制(AdaptiveCruiseControl,ACC),同时采用本文研究开发的数字孪生测试系统和虚拟仿真方法对ACC试验。下面针对某款车型,首先在仿真环境下开发了相应的控制器,然后对相应的控制算法进行了基于数字孪生的试验测试。
3.1自适应巡航仿真及试验验证
式中,dres为期望的车间距;vego为自车即被测车辆的纵向行驶速度;th为所预先设定的安全时间,取2.3s;d0为两车之间的安全距离,取5m。
下层跟踪控制环节采用双重PI控制算法,即对车辆位置和速度同时进行PI的反馈跟踪控制。其中,位置控制器的控制参数为Ps=1.00,Is=0.05;速度控制器的控制参数为Pv=0.90,Iv=0.20。仿真测试工况如下。
假定开始时两车距离为5m,均处于静止状态(图4)。在t=0时刻,前车即目标车辆以1m/s2的加速度起步,匀加速至10m/s,然后保持10m/s的速度匀速行驶3.0s;接着再以4m/s2的减速度进行制动至停车。
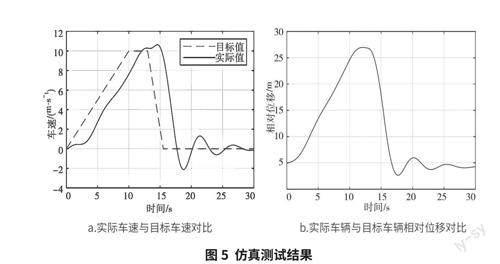
仿真测试结果如图5所示。图5a为后车即测试车辆的车速与目标车辆车速的响应对比,图5b为两车相对位移的响应。可以看出,当目标车辆以1m/s2的加速度匀加速起步时,后车即被测车辆的响应有一定的滞后,滞后时间约为2.5s,这与上层安全距离模型中预先设定的安全时间有关。安全时间既不能太短,同时也不宜过长,一般取为2.0s左右。
此外,在跟车过程中,被测车辆的车速和相对位移均出现了一定的波动,这与下层控制器的设计有一定关系。当前车制动至停车后,两车相对位移基本保持在5m左右,这与预先设定的安全距离有关。此时的被测车辆为具有实际执行机构的真实车辆,目标车辆为51SimOne仿真环境下的虚拟车辆(图6)。
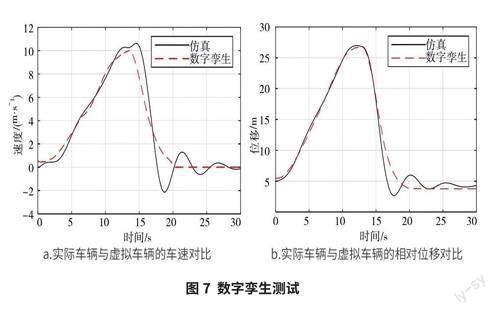
数字孪生测试结果如图7所示。其中,图7a为实际车辆的车速,图7b为实际车辆与虚拟目标车辆的相对位移。为方便对比,将纯仿真测试结果也一并进行了显示,红色虚线为数字孪生的试验测试结果,黑色实线为纯仿真的结果。可以看出,纯仿真响应结果与数字孪生的试验测试结果基本一致。由于基于纯仿真的控制器开发没有考虑到自车质量、加速踏板与制动压力的实际响应特性,仅仅将车辆纵向加速度作为控制变量,因此得到的各指标响应出现了一定程度的波动。而基于数字孪生的试验测试中,被测车辆为含有执行机构的真实车辆,各指标波动相对较小。
3.2试验结论
通过与仿真测试方法对比,表明了数字孪生测试方法对智能汽车的测试有效。在进一步研究中,将数字孪生测试方法与真实车辆测试进行对比,从而对本方法与实车测试结果的一致性进行评估,提高智能汽车数字孪生仿真测试方法的实用性,进而实现数字孪生仿真平台的闭环仿真测试。
4结束语
本文针对智能车辆数字孪生测试系统的具体实现,从总体框架、软件和硬件实现等方面进行了具体介绍,并结合自适应巡航和自动紧急制动控制器的开发及验证的具体应用进行了研究,该研究对于智能汽车产品开发及其功能测试具有较强的借鉴意义。后续将开展人-车-路等复杂交通环境下的其他功能测试研究。