基于叠加态涡旋光多普勒效应的物体速度探测
2023-09-23姚俊宇刘学静俞宪同
姚俊宇,常 敏,刘学静,俞宪同
(上海理工大学 光电信息与计算机工程学院,上海 20093)
引言
携带轨道角动量(orbital angular momentum,OAM)的涡旋光[1],其波前除具有螺旋相位结构外,还具有额外的相位因子 exp(ilφ),其中φ为角坐标,l为其螺旋相位波前的拓扑荷数(可为任意整数)。该相位因子在研究中可视为一个额外的物理自由度。涡旋光种类丰富,目前常见的有拉盖尔高斯光束、贝塞尔光束[2]、贝塞尔高斯光束[3]等。由于其具有额外物理自由度并携带轨道角动量,近年来在信息传输与编码[4-6]、纳米尺度的微操作,如光镊[7-8]以及金属纳米结构的手性控制[9]等方面有着广泛的应用。
经典的线性多普勒效应指的是相对探测器存在运动的光源,被探测器测量时出现频移,其本质上为一种相对论效应,是电磁波遵循洛伦兹变换的直接结果。
1992 年后,随着人们对涡旋光关注的增加,有关旋转多普勒效应的研究也相应增多,并得到迅速发展。最初认为,旋转多普勒效应并不是由观测者与光源之间的相对线性运动造成,而是由光源与探测器之间的相对转动造成。实验中最早观察到的旋转多普勒效应为具有 exp(ilφ) 相位因子的电磁波在穿过旋转的 π 模式转换器后频率发生了变化[10]。Courtial 等[11]也在1998 年通过归纳此前的实验结果后,总结出旋转多普勒效应的计算模型与光子所具有的总角动量有关。近年来,许多研究者从相位调制、能量转换以及相对运动等不同的视角推导了旋转多普勒效应的频移公式[12-15]。Fang 等[16]也于2019 年从相位调制的角度证明了线性多普勒效应与旋转多普勒效应为同源效应,因此,旋转多普勒效应的机理也愈发清晰。
涡旋光在运动物体测速方面具有诸多便利。由于光源与观测者的相对旋转会引起旋转多普勒效应,可利用电磁波对物体转速[17-18]以及流体涡量[19]进行直接测量。同时,由于如贝塞尔高斯光束这样的涡旋光在有限传播距离内具有无衍射的特点[20],测量转速时有一定能力越过障碍物,从而拓宽了以该类涡旋光作为光源所设计的传感器的应用场景。涡旋光同样可以利用线性多普勒效应对线速度进行测量。2013 年,Rosales-Guzmán 等[21]利用数字微镜器件模拟物体复合运动,通过涡旋光依次测量了物体相对运动的线速度与旋转角速度。对涡旋光的额外物理自由度加以利用,能够获得被测物体额外的运动信息。通过嫁接完美涡旋光,两半环具有不同的轨道角动量模式,可以通过不同轨道角动量模式的频移关于零频的不对称性判断流速方向。
嫁接完美涡旋光与叠加态涡旋光的复杂相位结构相较单一轨道角动量模式的涡旋光在具体测量时频移谱也会呈现额外信息。复杂相位结构涡旋光的制备日趋成熟,利用叠加态涡旋光对复合运动状态的物体进行测速时,依据不同频率偏移的结果可以算出不同运动成分的速度信息,无需对线速度与转速分别进行测量[21]。叠加态涡旋光作为探测光源速度的探测模型,在应用时具有探测方便、信息量大以及探测成本低的优点。
本文利用涡旋光线性多普勒效应与旋转多普勒效应的统一模型,提出一种基于叠加态涡旋光经过单次测量可同时测得运动物体线速度与角速度的方法。针对具体的刚体复合运动进行实例分析与仿真,比较不同被测物运动状态以及光源偏振态引起频移的区别。本文就涡旋光对复合运动物体速度测量提出了新的方法,该方法对复合运动的速度测量具有指导意义。
1 涡旋光的多普勒效应
式中,c为光速。该现象被称为电磁波的线性多普勒效应。
在傍轴近似的情况下,如图1 所示,对于良好校准的涡旋光(忽略径向线性动量密度带来的影响),考虑涡旋光的角向线性动量密度与光轴方向线性动量密度,其角向与光轴之间的夹角(本文将忽略自旋角动量带来的影响),其中λ为涡旋光波长,r为涡旋光径向坐标。
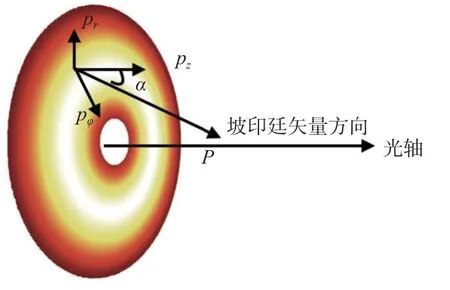
图1 坡印廷矢量与光轴方向夹角Fig.1 Skew angle between Poynting vector and its optical axis
其频移与转速成正比,称为旋转多普勒效应。
如图2(b)和(c)所示,当光轴和旋转中心不重合时,若光轴与旋转中心的偏移d>r,频率偏移与式(2)吻合[23];当d<r时,所得频移与光轴中心具体位置相关,但其中心频移依然可以用式(2)描述[24]。
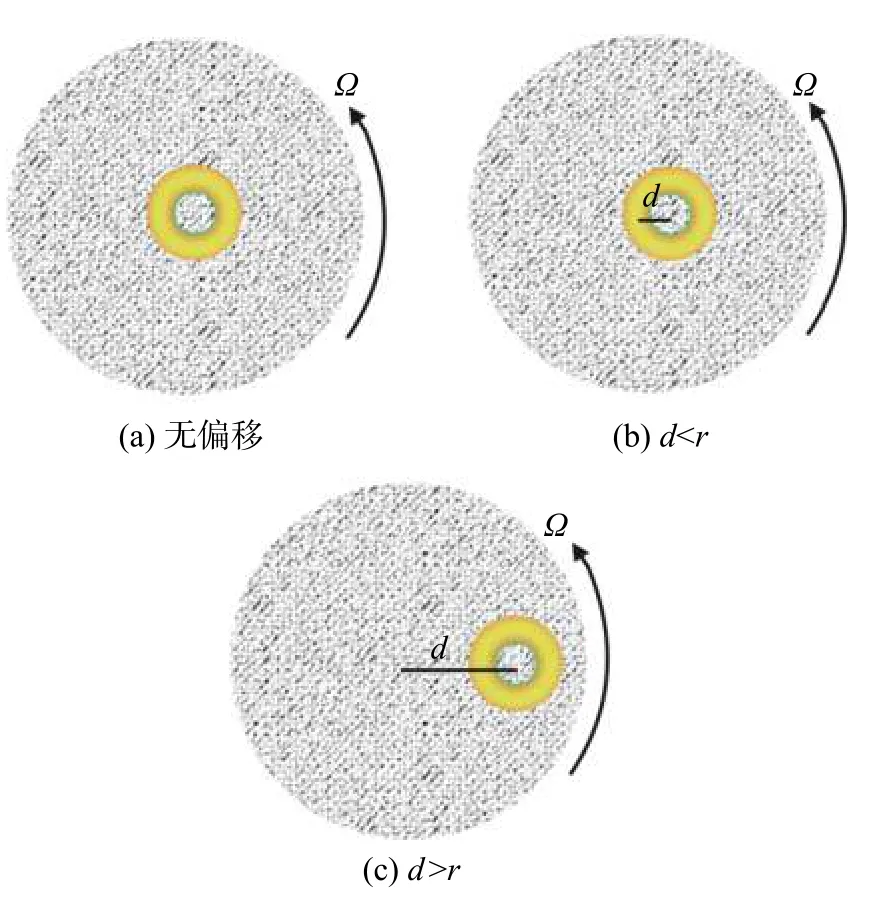
图2 涡旋光光轴与旋转中心相对位置Fig.2 Deviation between the optical axis and the spinning center
涡旋光的坡印廷矢量与光轴在角向上的夹角α 使其在测量复合运动速度时的频移既依赖于沿光轴方向,也依赖于垂直于光轴平面上角向运动造成的多普勒效应。对于相对复合运动的两参考系,涡旋光经过参考系变换后的总频移为
其频移量由参考系相对线性速度与相对转速来共同决定。
2 叠加态涡旋光对复合运动的测量
叠加态涡旋光是在一束涡旋光中含有多个轨道角动量模式,相比单一轨道角动量的涡旋光通常具有更复杂的相位结构。对于多轨道角动量模式的涡旋光其截面光强可能呈花瓣状,出现多个圆环,如图3(a)与(b)所示。含有n个模式的涡旋光可表示为,其中 αl为轨道角动量模式的振幅。
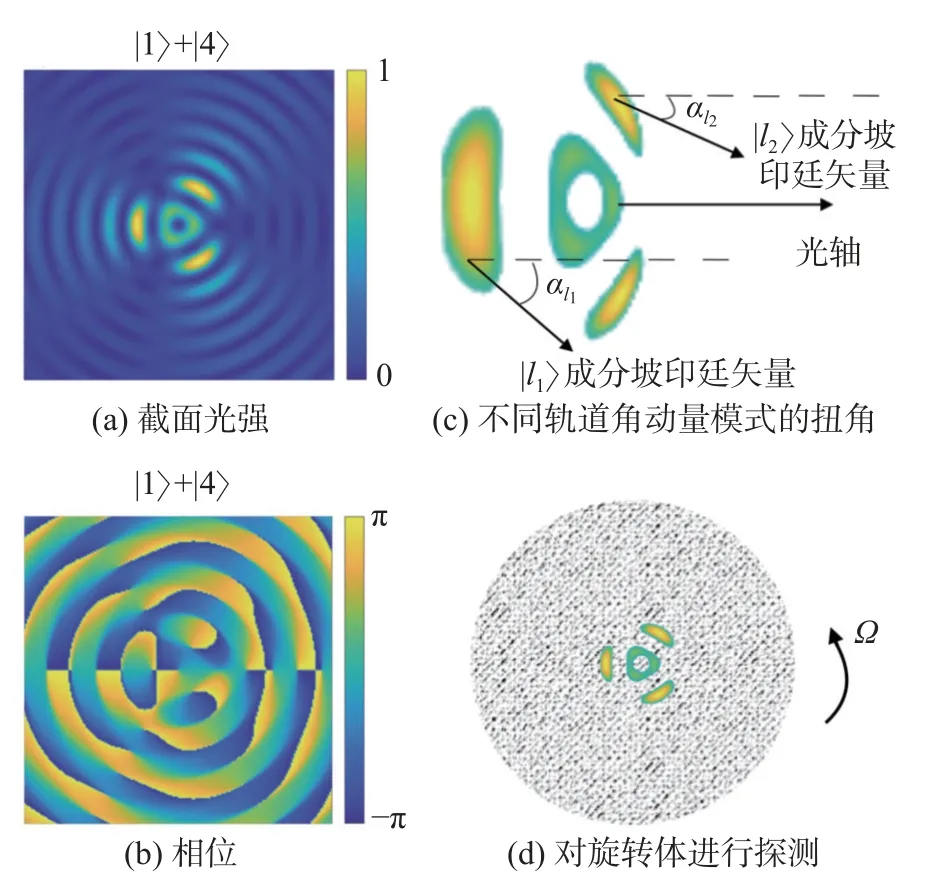
图3 |1〉+|4〉 的叠加态的贝塞尔高斯光束对旋转物体探测Fig.3 |1〉+|4〉 Superposed Bessel-Gaussian beams detecting spinning object
如图3(c)所示,由于叠加态涡旋光中含有多种轨道角动量模式,不同轨道角动量模式 的坡印廷矢量与光轴在角向有不同夹角 αl(与其拓扑荷数l及波长λ成正比)。根据式(2),不同轨道角动量模式的成分会引起不同的频移。叠加态涡旋光探测到的额外频率偏移信息可用于区分线性多普勒效应与旋转多普勒效应带来的频移。
物体复合运动的速度测量可以通过对粒子使用涡旋光进行两次测量,分别确定粒子的线性速度与转速[22]。使用叠加态涡旋光则不需要对线性速度和转动速度进行分别测量,其优点在于多模式轨道角动量具有的额外信息量。
对于拓扑荷为 |l1〉+|l2〉 的叠加态涡旋光其频率分别为和,当以该叠加态涡旋光照射沿光轴方向进行复合运动的物体M时如图4所示。
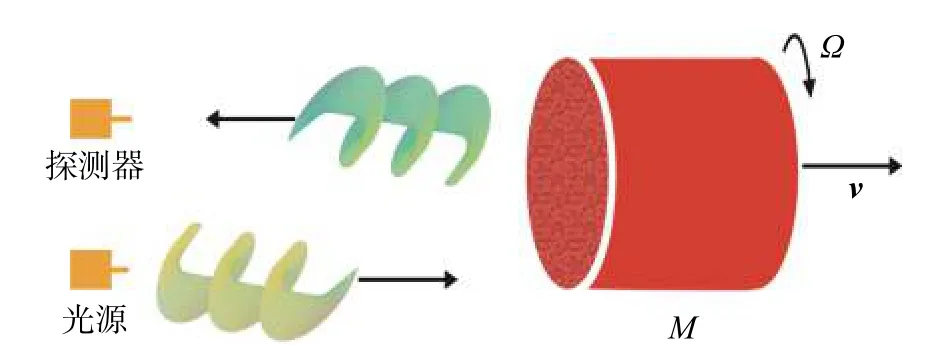
图4 涡旋光对复合运动的探测Fig.4 Vortex beams detect a spinning object with linear velocity
式中,Δ,Δ分别为轨道角动量模式l1,l2的频移。由式(4a)及(4b)可以得出物体的线速度与转动速度分别为
即通过叠加态涡旋光进行单次测量后,可以测得涡旋光频移,利用式(5a)和(5b)可以同时求出物体的线性速率与转动速率。
在实际的实验与应用中,对于涡旋光的测量,通常使用外差法。假设以频率为f的 |l1〉+|l2〉叠加态涡旋光作为光源,对相对转速为 Ω,相对线性速度为v的运动体进行探测,根据式(4a)及(4b),探测器可以得到信号光
式中,Es为信号光振幅。使用频率为,轨道角动量模式为l3的涡旋光作为参考光
式中,Eref为参考光振幅,干涉后原则上可以提取到拍频
通过与式(5a)以及(5b)类似的方法
得到复合运动的线速度与角速度。
3 复合运动测速仿真及分析
根据前面的结论,旋转多普勒效应与涡旋光的拓扑荷数 以及光源与被测物的相对转速 Ω 成正比,线性多普勒效应与涡旋光的频率 以及光源与被测物的相对线性速度v成正比。仿真结果基于式(4a)、(4b)、(5a)及(5b),根据所测频移 Δf可以还原所测物体速度成分。选取l1,l2,l3分别为4,16,25,频率分别为f1=4.2×109Hz,f2=5.0×109Hz,f3=6.1×109Hz 的叠加态涡旋光进行仿真,图5(a)表示旋转多普勒效应引起的频移,图5(b)表示线性多普勒效应引起的频移。
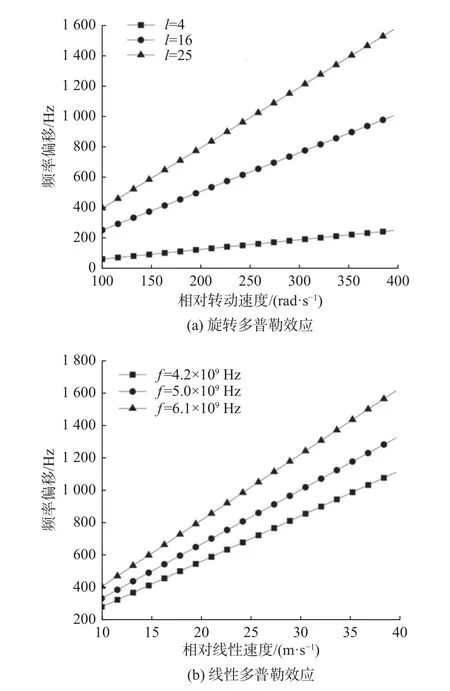
图5 涡旋光探测复合运动的引起的多普勒效应Fig.5 Vortex beams detect the Doppler effect caused by complex motion
根据前面的内容,对双轨道角动量模式的叠加态涡旋光,若参考光的拓扑荷数l=25,频率f=6×108Hz,截取复合运动线速度v=25 m/s,角速度 Ω=50 rad/s 时的探测结果,可以提取的拍频如图6 所示。
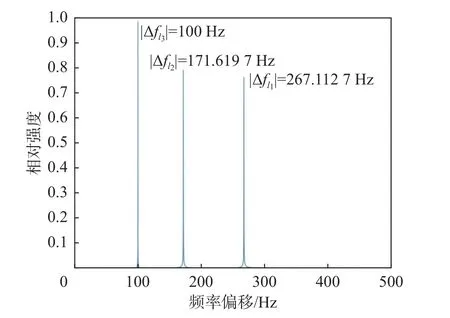
图6 叠加态涡旋光探测复合运动时的拍频Fig.6 Beat frequency in multi-OAM mode vortex beam detection compound motion
依据式(5a)、(5b)、(9a)以及(9b)可以还原出物体的运动线速度以及角速度。
如图7 所示,图中各点为采样点,通过两两轨道角动量模式叠加态涡旋光的计算,还原出物体的线性速度以及角速度。
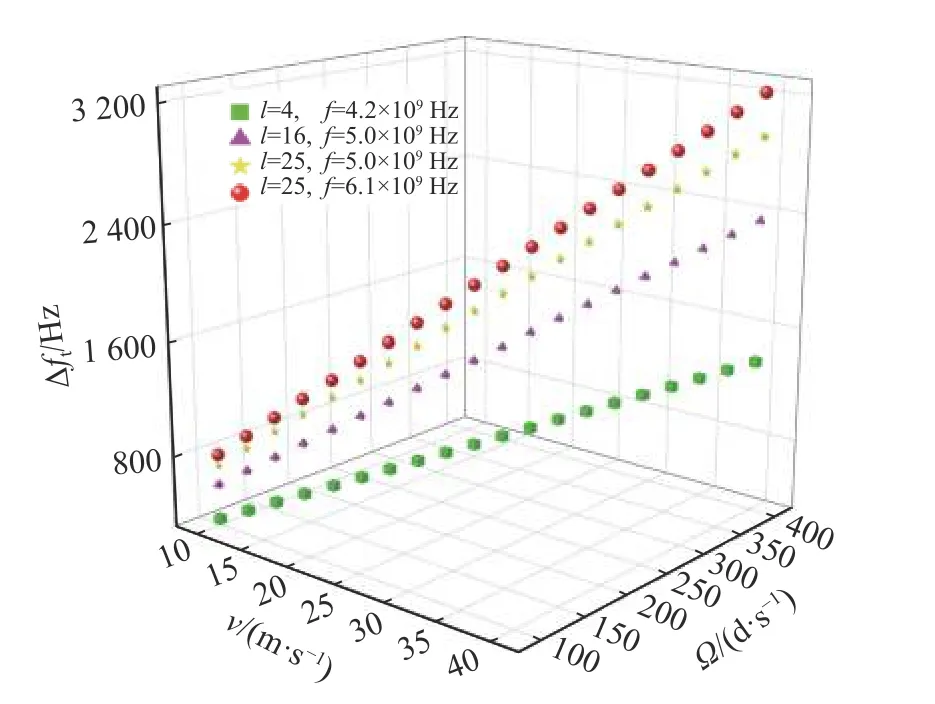
图7 叠加态涡旋光对物体运动速度的描述Fig.7 Motion of object portrayed by superposed vortex beams
从图7 中可以看出,总频移为线性多普勒效应与旋转多普勒效应的线性叠加。
4 模型关于复杂复合运动的改进
在叠加态测速模型基础上,本研究给出了最为基本的物体复合运动测速模型。但事实上,物体的复合运动将会有更加复杂的情况。前面所提到的频率偏移模型忽略了垂直光轴方向的横动带来的频率偏移。实际上,从相位调制的角度,垂直光轴平面上的运动同样可能带来反射光的频率偏移。对于有相位结构的光束u(t)=u0exp(ikz+Φ(x⊥)),其中k为电磁波波数,x⊥为垂直光轴方向的截面位置。其相位调制部分带来的频率偏移为
式中,∇ Φ·v⊥为由被探测物体在垂直光轴平面运动引起的相位梯度。可见垂直于光轴方向的运动,其相位梯度可能引起频移。如图8 所示,对于有相位因子 exp(ilφ) 的涡旋光,其相位梯度为。对于速度为v的横向平动,相对运动速度在极坐标下可视为v=v(cosφr-sinφφ) 。利用拓扑荷为l的涡旋光对其进行探测,根据式(10)得到的频移为
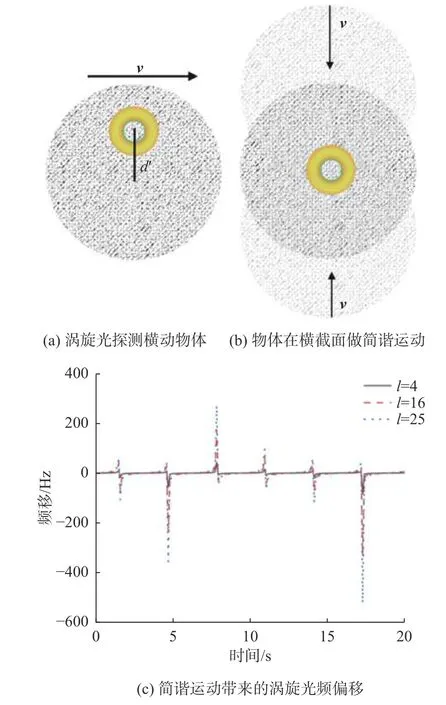
图8 由物体横动引起的多普勒效应Fig.8 Doppler effect caused by transverse motion
由于涡旋光相位结构的影响,带有相位因子exp(ilφ)的涡旋光在测量物体横向运动时,所得频移与其速度以及其测量位置相关如图8(b)与(c)所示。对于这样的横动,同样可以通过频率为,,,轨道角动量模式为l1,l2,l3的叠加态涡旋光进行探测。根据式(4a),(4b)以及式(11)得到反射光总频率偏移该物体的转动速度、光轴方向线速度,以及横向运动的线速度可以通过联立公式(12a)~(12c)进行求解。
该模型的频率偏移会受到的另一类影响是光源本身的特性以及所用光源的偏振态。文献[11]中将涡旋光的偏振态对频移的影响总结为,其中-1≤σ≤1,为矢量电磁势中对椭圆偏振及圆偏振的描述。该文献认为旋转多普勒效应与线性多普勒效应类似,线性多普勒效应频移与单光子的总线性动量有关,而旋转多普勒效应则与单个光子所带的总角动量有关。偏振态确实可以通过影响涡旋光的线性动量中角向的成分改变坡印廷矢量与光轴夹角 α,从而改变探测光的频移量。在旁轴近似下,若矢量电磁势
式中:系数α 和β 为α2+β2=1;u为电磁波的空间强度分布;k为波数。
满足洛伦兹规范,其电场强度为
磁场强度为
坡印廷矢量为
可以看出,垂直于光轴平面上的线性动量密度与光场梯度相关,即角向的线性密度动量取决于空间中具体的光场梯度。
从上述含有椭圆对称偏振因子的涡旋光计算中可以发现,偏振因子对偏离角的影响将与具体的光场梯度相关,需要对测量中所用具体光源以及具体偏振态进行分析,不存在对于偏振涡旋光的普适模型。
5 结论
本文针对复合运动状态的速度测量复杂度较大的问题,提出了利用叠加态涡旋光对复合运动进行测速。在此基础上推导了叠加态涡旋光的速度测量模型,并且给出实际测量涡旋光时常用的外差法复合运动测量的模型。对模型在涡旋光测量复合运动的情形下进行了仿真与分析,对比了不同频移下对应的运动状态。在此基础上进一步讨论了更加复杂的运动状态可能对涡旋光测量造成的影响,具体讨论了垂直光轴平面上的横动造成的频移,以及涡旋光本身具有椭圆对称偏振下的频移。该模型将对复合运动的测速,以及速度传感器的设计有指导作用。
