基于微电流刺激的多强度分级虚拟触觉反馈
2023-09-22谭铭昱花浩镪熊奇炜徐向民梁家铭黄国志
谭铭昱 花浩镪 熊奇炜 朱 齐 舒 琳,3 徐向民,,3 梁家铭 魏 磊 黄国志 曾 庆
1(华南理工大学未来技术学院 广州 511442)
2(华南理工大学电子与信息学院 广州 510641)
3(琶洲实验室 广州 510335)
4(腾讯科技(深圳)有限公司Robotics X 实验室 广东深圳 518054)
5(迪肯大学 澳大利亚墨尔本 3220)
6(南方医科大学珠江医院康复医学科 广州 510280)
7(南方医科大学康复医学院 广州 510515)
(202221062514@mail.scut.edu.cn)
近年来,虚拟现实(virtual reality,VR)技术取得了突飞猛进的进步,从最初只用于实验室等特定场所,逐渐走进人们的日常生活.目前,以VR 为代表的大多数虚实融合人机交互研究和产品都是通过视觉和听觉与用户开展交互活动,但是人对客观事物建立的认知是基于视觉、听觉、触觉、嗅觉、味觉和知觉的协同作用,仅依靠视觉和听觉难以传递完整的交互信息,限制了虚实融合人机交互的真实感和沉浸性[1].触觉是人类感知并与外部环境交互的重要方式,在增强用户的VR 交互体验方面发挥着不可替代的双向信息传递作用[2].
为了实现有效的触觉反馈,研究人员提出了许多实现方法.文献[3]使用振动反馈研发设计的Rich pinch,通过在两个指尖连接振动电机来实现触觉反馈.文献[4]提出了McKibben 气动肌肉执行器,并相应地设计了触觉手套.此外,还有许多其他方法可以实现触觉反馈.然而,这些方法往往存在结构复杂、成本高、可穿戴负载高、拟真度不足等瓶颈.
微电流触觉反馈具有集成度高、反馈模态丰富等优点,吸引了许多研究人员的关注.例如,文献[5]设计了多阵列触觉显示器,通过改变阵列中单个电极的显示顺序和位置来产生不同的形状.文献[6]研发设计了具有超高分辨率的可穿戴触觉反馈设备,通过高频调制的方法,使用低电压刺激皮肤下的触觉感受小体和神经,高保真度地实现压力、振动和纹理粗糙度等触觉.在不同触觉反馈类型模拟方面,文献[7-8]设计了传感电路和触觉显示阵列,分别用于感知和模拟纸张、木材、橡胶和纺织品等材料.
由于电触觉反馈的强度识别基于主体感知[9-12],个体触觉感知分辨率存在瓶颈,探究电触觉的强度分级技术,有助于指导高精度电触觉技术研究及应用落地.在电触觉反馈强度识别研究中,文献[12-13]分别测试了电触觉反馈强度等级的识别准确率,但识别准确率较低,四级强度识别准确率分别为76.2%和85%.文献[6]主要测试评估了相邻强度等级的识别准确率,但强度感知混淆程度未做更详尽探讨.此外,文献[14-17]指出长时间应用刺激电流会造成触觉感受器疲劳,可能产生手指麻木、刺痛、触电等不适感觉.因此,在我们所知的范围内,针对多强度电触觉反馈的有关研究,目前主要存在2 个问题:1)电触觉反馈中各强度识别准确率不够;2)在电触觉反馈过程中,人体可能会产生手指麻木、刺痛、触电等不适感觉.
为解决现有工作的局限性,本文首先对影响电触觉反馈效果的各因素进行了研究,探索了新的电触觉模式.然后,本文基于该模式进行了心理物理学实验,并与其他文献的研究结果进行了对比.最后,本文讨论了这种多强度电触觉反馈设备的应用前景和未来需要攻克的问题.
1 相关工作
1.1 刺激信号参数
在电触觉反馈领域,刺激信号通常以电脉冲的形式传递.由于个体差异性、执行器-人体交互界面及电刺激回路阻抗的不稳定性,恒压源施加到人体的刺激电流会产生剧烈的波动.而人体的触觉感知与电流大小密切相关,电流波动会极大影响人体对触觉的感知.因此,本文采用电流源作为输出形式来研究电触觉反馈.
在基于微电流的触觉反馈研究中,研究人员通过大量实验确定了人体触觉感知与电流参数之间的一些关系.本文对其中的部分关系进行了总结,如表1和表2 所示.粗糙度、摩擦、不同图案以及力矢量的分布等触觉反馈类型可以通过振动感和压力感这2种触觉感受在时间-空间上控制电脉冲刺激的模式来集合生成.因此,振动感和压力感的反馈效果在多元触觉反馈的研究中十分重要.而如何准确反馈每一时刻下每个位置的振动感和压力感,成为集合生成多元触觉反馈的关键.故本文主要研究如何提高触觉反馈强度识别的准确程度.
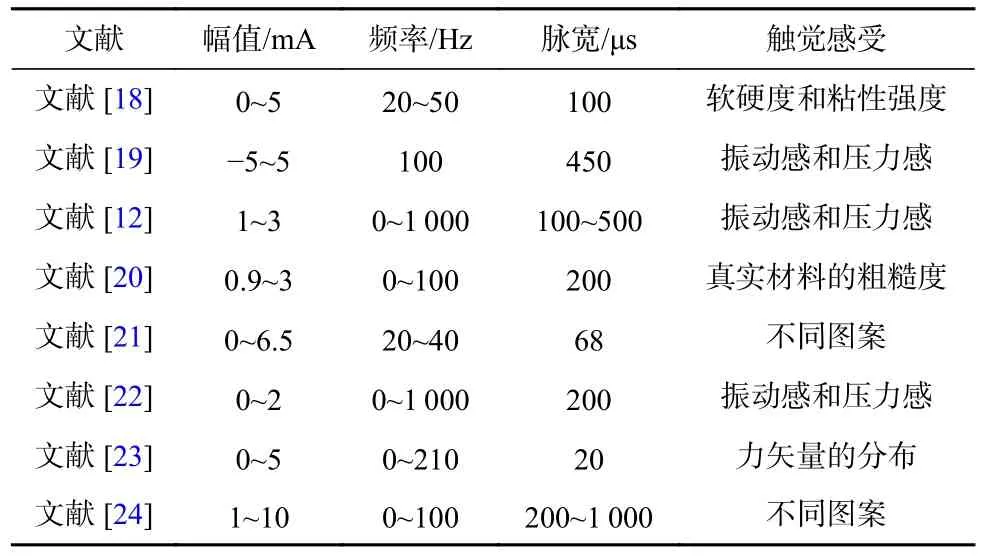
Table 1 Current Stimulation Signal Parameters in Related References表1 相关文献中的电流刺激信号参数

Table 2 Voltage Stimulation Signal Parameters in Related References表2 相关文献中的电压刺激信号参数
在影响触觉反馈强度识别准确程度的各因素中,文献[12]通过对电流模态进行脉宽和频率调制,实现了不同强度的振动感和压力感的触觉反馈;文献[28]研究了电流频率、脉宽与人体触觉感受之间的关系,发现在不同电流脉宽下人体触觉感知能力无显著差异;文献[29]发现电流振幅对触觉感受的影响大于脉宽的影响;文献[30]提出当电流脉宽超过500 μs 时,人体皮肤表面会产生刺痛感.因此,触觉反馈强度主要取决于刺激信号的幅值和频率.其中幅值会影响触觉反馈的强弱,当刺激信号幅值小于感受阈值时,人体无法感受到触觉反馈;当刺激信号幅值大于疼痛阈值时,人体会感受到刺痛感.频率不仅会影响触觉反馈的强弱,还会影响触觉反馈的类型,比如低频刺激信号能产生压力感,高频刺激信号能产生振动感.为减少触觉反馈类型变化对受试者感知反馈强度产生影响,本工作将刺激信号幅值作为控制触觉反馈强度大小的变化量.
1.2 电极阵列设计
电触觉反馈的效果也会受到电极阵列设计的显著影响,这包括电极形状、接触面积和分布密度等.文献[19]研发设计由8 个等距矩形电极组成的阵列来研究阳极刺激与阴极刺激对应的感觉阈值差异,其中电极尺寸为1 mm×8.5 mm,电极间距为1 mm.文献[31]使用由24 个电极尺寸为2 mm×2 mm、电极间距为0.2 mm 的微电极组成的刺激阵列来研究电触觉反馈,研究发现通过不同的控制策略,能实现点、线、面状物体以及多点的触觉反馈,且位置分辨率达2.2 mm.文献[23]将31 个针状电极排列成六边形,其中针状电极直径为1 mm,电极间距为2 mm,该阵列能够有效表示虚拟力反馈的大小和方向变化.文献[32]研发设计出具有大面积多点触觉反馈的装置,其中每个电极的直径和间距均为1 mm.由于该装置触觉反馈面积大、分辨率高,因此能够在同一表面上同时提供不同的触觉反馈.文献[33]提出对于等距电极阵列,单点电极的合适尺寸范围在1~3 mm,电极间距合适范围为0.2~1.2 mm.表3 列出了电触觉反馈相关文献中使用的电极阵列设计参数.
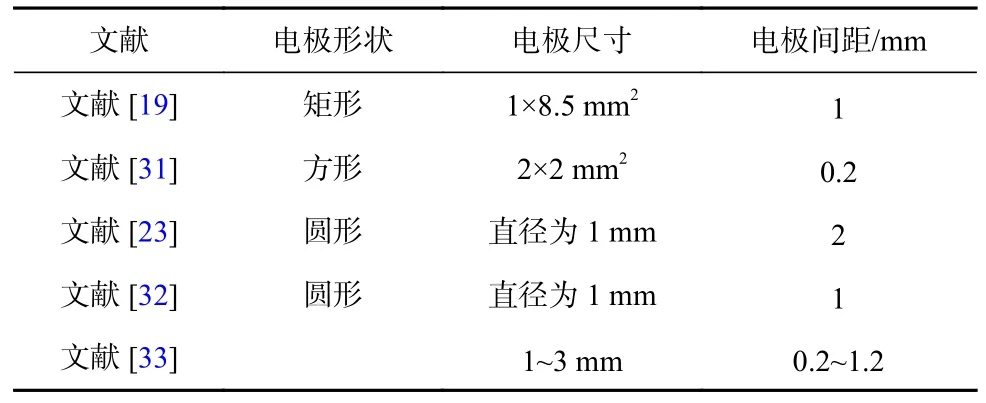
Table 3 Electrode Arrays Parameters in Related References表3 相关文献中电极阵列参数
1.3 接地电极位置
如图1 所示,当受试者的手指受到电流刺激时,电流将从正极经身体流向负极.接地电极作为负极,其位置会影响整个电流通路的位置、密度、深度以及扩散程度.因此,接地电极位置对触觉反馈的效果有着十分重要的影响.
接地电极的放置位置有很多种,如经背[18]、指环[20]、掌心[5]、指背[34]、共面[23]、同轴型[35]等.其中,可穿戴设备中最常用的是经背式、指环式、掌心式和指背式,主要区别在于接地电极的放置位置,表4 简单阐释了这些接地电极类型的优缺点.
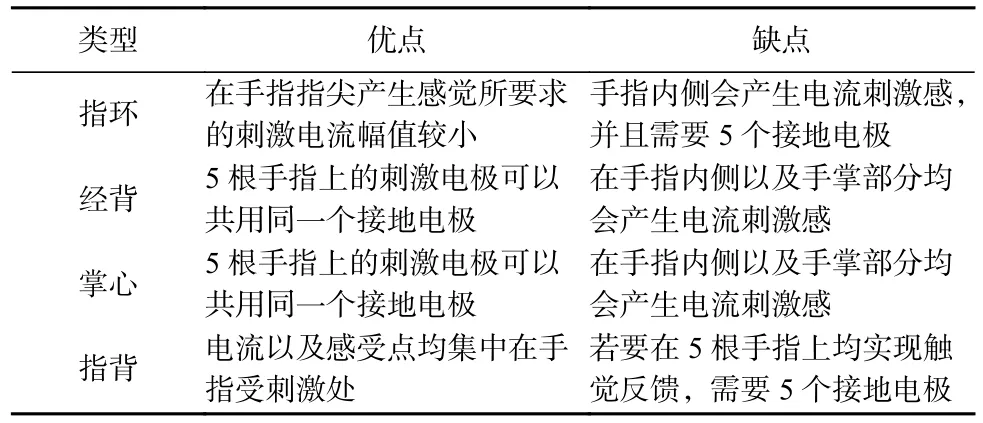
Table 4 Advantages and Disadvantages of Different Grounded Electrode Types表4 不同接地电极类型的优缺点
1.4 电刺激模态优化的理论模型
当微电流长时间作用于人体时,皮肤阻抗会造成电荷积累,导致受刺激部位的不适、麻木、皮肤组织灼伤和损伤.为了减轻这些不利影响,可以利用双相电流脉冲,通过正负电荷相互抵消的方式来减少电荷积累,提高电触觉反馈的舒适度,进而提高识别准确率.而如何确定合适的正负电荷量比值是需要探讨的一个重要问题.
目前,电触觉反馈方式主要包括躯体感受皮层电刺激、侵入式外周神经电刺激和经皮电刺激.然而,由于前2 种方法需要将刺激电极植入体内,风险较高.因此,本文重点讨论经皮电刺激,这是一种非入侵式和低风险的通过刺激皮下感觉神经元实现触觉反馈的方法.在经皮电刺激过程中,电极阵列与皮肤直接接触,为了确定电触觉反馈研究过程中适用于人体的微电流正负电荷量比值,有必要研究人体皮肤结构和皮肤阻抗.
人体皮肤是一个复杂的器官,主要由表皮和真皮组成[36],其厚度因身体位置的不同而不同,从眼睑处的0.5 mm 到脚底处的4 mm 以上.表皮主要由角质细胞、黑色素细胞、朗格汉斯细胞以及默克尔细胞组成[37];而真皮主要由结缔组织组成,包含纤维细胞、巨噬细胞和脂肪细胞.
图2 是人体皮肤结构和皮肤阻抗的RC等效电路模型[38-40],通常被称为Montague 模型[41].真皮组织与深层结构一起保持着稳定的离子环境,可以提供低而稳定的阻抗水平,用RMS表示,RMS的范围是0.1 Ω ·cm2~1.0 k Ω·cm2[42].相反,角质层作为电离物质运动的屏障,是皮肤-电极界面上阻抗最大的部分.当潮湿或者出汗时,角质层的电导会显著增大,这可以解释在实验过程中手指出汗时,被作用部分感觉会发生明显变化这一现象.表皮部分的阻抗被建模为由RM和CM组成的并联网络,RM的范围是79 Ω ·cm2~5 M Ω·cm2[42].假设皮肤总阻抗为ZM,Montague 模型将阻抗表示为:
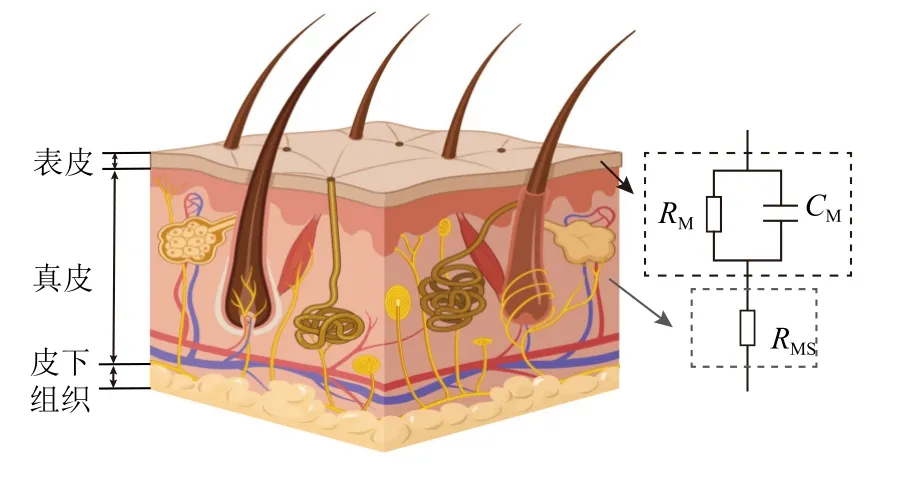
Fig.2 RC equivalent model of human skin impedance图2 人体皮肤阻抗RC 等效模型
Montague 模型在研究较深的皮肤层方面有较大的局限性.为了解决这个问题,Tregear 模型[43]利用并联的RC电路来说明每个皮肤层中不同的电容和阻抗值,如图3 所示.
通过对图3 所述的网络进行分析,能够得到这2个皮肤层的阻抗方程为:
其中RT和CT分别表示表皮层的电阻和电容.
通过类比并获得每个皮肤层的阻抗方程,Lykken在Montague 和Tregear 模型的基础上开发了更现实的皮肤阻抗模型[44].该模型如图4 所示,其提供了对皮肤电特性的全面了解.

Fig.4 Lykken model of human skin impedance图4 人类皮肤阻抗的Lykken 模型
Lykken 模型由多个并联RC电路组成,每个电路都与一个电阻相连.与以前的模型相比,Lykken 模型减少了许多细胞层的贡献,有效解决了频率对电容产生影响的问题.此外,即使不考虑表皮,模型中的串联电阻仍能代表深层电阻[44].假如用N×M来表示单个RC网络的总数,p表示并联网络的数量,RL和CL分别表示皮肤层的并联电阻和电容,RLS表示皮肤层中的串联电阻,等效电路的阻抗方程表示为:
2 方 法
在本节中,我们分别使用3 组固定电流参数、6种电极阵列和4 种最常用的接地电极位置对强度识别准确度的影响进行了全面地测试.通过对实验数据的分析,我们确定了适用于强度识别的最佳电刺激模式.在此基础上,提出了一种新的方法来优化刺激电流的正负电荷量比值.
2.1 实验范式
2.1.1 电流参数
在本研究中,我们旨在研究以电流振幅为变量来调整电触觉反馈强度.为了确定合适的电流脉宽和频率,我们选取文献中最常用的200 μs 脉宽值作为实验脉宽,并评估了3 种不同的电流频率,即100 Hz、200 Hz 和500 Hz,以确定它们对反馈强度的影响.
2.1.2 电极阵列
在这项研究中,我们首先设计了直径分别为2 mm和1 mm 的圆形电极阵列,其电极间距分别为1 mm和2 mm,在此基础上设计出其他类型的电极尺寸和电极间距.电极阵列设计如图5 所示,其中D是圆形电极的直径,L是方形电极的边长,OD和ID分别是环形电极的外径和内径,S是电极之间的间距.
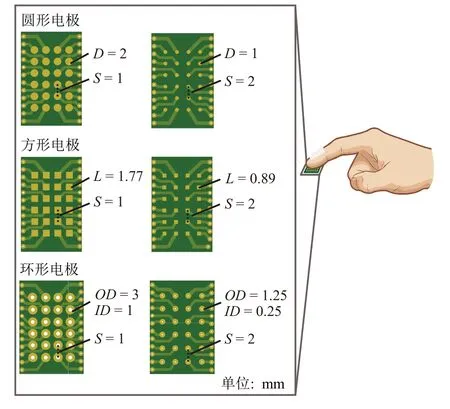
Fig.5 Design of electrode arrays图5 电极阵列的设计
2.1.3 接地电极
在选择最佳接地电极位置时,我们选择了可穿戴设备中常用的4 种方法:经背式、指环式、掌心式和指背式,电极位置如图6 所示.

Fig.6 Placement of grounded electrode图6 接地电极位置
2.2 电刺激模态优化
由于人体组织存在电容效应,通过微电流刺激实现触觉反馈的过程可简化为电容充放电模型.为了减少相邻充放电过程之间的相互影响,电容充放电波形应近似冲激函数形式.因此,在电触觉反馈实现过程中,人体手指被作用部分两端体电压波形在理想情况下如图7 所示.其中,Ai-Bi(i=1,2,…n)的电压值保持稳定,表明人体手指尖在微电流刺激后,电压值恢复到接受刺激前的水平,没有电荷积累;Ci(i=1,2,…n)的电压保持不变,表明在电流刺激前后,人体阻抗没有明显变化.
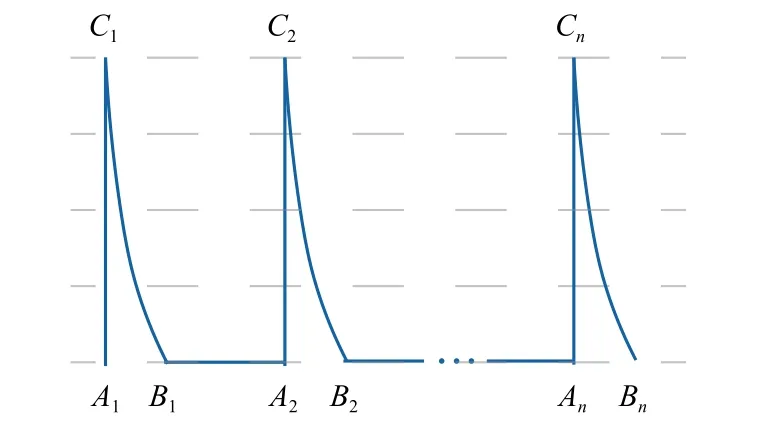
Fig.7 Schematic diagram of human body voltage waveform under ideal conditions图7 理想情况下人体电压波形示意图
图8 为刺激电流波形,A+为电流正向幅值大小,P+为正向脉宽,A-为电流负向幅值大小,P-为负向脉宽,T为脉冲周期.
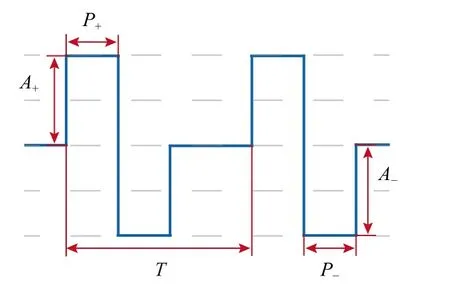
Fig.8 Schematic diagram of stimulation current waveform图8 刺激电流波形示意图
对于单位时间内被电流作用部分的正负电荷量Q的计算,通过图8 可知:
在这项研究中,本文研究了具有不同的正负脉宽比和正负电荷比的双相脉冲电流对应的人体电压波形,通过对电压波形的分析来优化电刺激模态.
2.3 实验设备及程序
2.3.1 实验设备
实验系统主要由脉冲刺激器(制造商:AMPI,以色列;型号:Master-9)、隔离器(制造商:AMPI,以色列;型号:ISO-Flex)、刺激电极阵列和接地电极组成,如图9 所示.
2.3.2 实验程序
在这个实验中,我们首先用酒精擦拭受试者的手指以确保去除油脂、污物等;然后连接实验设备并将电流参数调整为默认值;接下来,受试者将手指的腹部放在电极阵列上;之后,脉冲刺激器产生电压信号,由隔离器将电压信号转换为具有相应参数的恒流信号,隔离器的输出电流从电极阵列经人体手指部分流回接地电极.为了尽量减少外部因素的干扰,受试者被要求在整个实验过程中保持闭眼.
受试者.本实验包括35 名身体健康的志愿者(17 名女性,18 名男性,年龄为20~30 岁).该实验方案得到了南方医科大学珠江医院的批准.在实验开始前,每位参与者都会签署一份知情同意书.
强度识别测试.本工作首先通过问卷调查方式收集多名受试者在不同接地电极类型情况下的触觉反馈感受,结合调研的文献确定了不同接地电极类型的优缺点(表4).从表4 中可以发现,不同接地电极类型会对触觉反馈感受产生十分重要的影响.为保证刺激电流不会串扰扩散,本工作将首先根据文献调研得到的微电流参数(见1.1 节)结合不同接地电极类型的优缺点确定最佳接地电极方式.由于在预实验中,相比刺激电极阵列类型,电流参数对触觉反馈效果影响更显著,而且对于不同类型的刺激电极阵列,同一电流参数产生的触觉反馈效果是类似的.之后,本工作再依次确定最佳电流参数和电极阵列.实验内容如表5 所示,每名受试者重复该实验20 次.
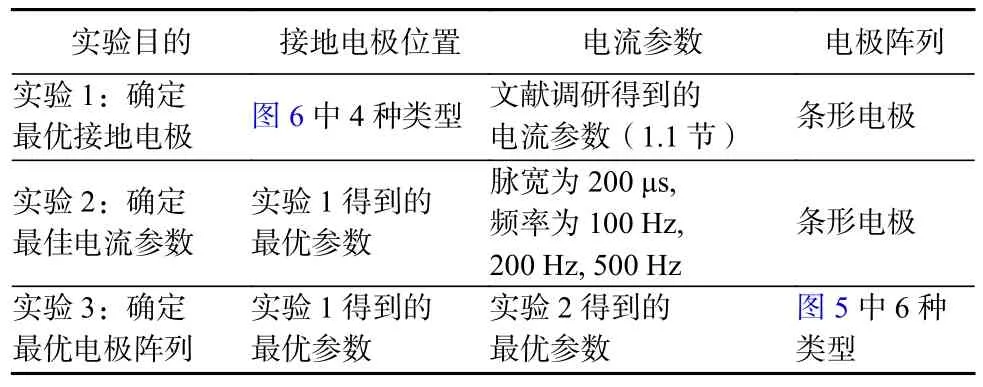
Table 5 Experimental Content表5 实验内容
触觉反馈不适度测试.将实验得到的最佳双相脉冲刺激电流和单相脉冲刺激电流进行对比.确保2种刺激电流的幅值和频率相同,并只改变刺激波形.对于每名受试者,以随机顺序交替应用双相刺激和单相刺激.每个刺激应用时,记录受试者的主观感受、不适或不适应程度,受试者需要在刺激过程中使用数值评分法(0~10 分)来评估他们的不适感受程度,其中0 表示无不适,10 表示最强烈的不适.收集和记录每名受试者的主观感受数据,比较双相电流刺激和单相电流刺激之间的主观感受差异.
实验评价标准.每个反馈强度下的识别准确率是通过计算正确识别的强度级别的数量与所进行的实验总数的比率来确定的.这个标准可作为强度分级有效性的可靠指标.
正负电荷量比值的优化.在强度识别测试中获得最优实验范式后,我们使用单相刺激电流和正负电荷量比值优化后的双相刺激电流评估了同一群体中不同强度反馈的识别准确性.
3 结果和讨论
本节首先介绍选择最优电刺激范式的实验结果,并根据实验结果的分析确定电触觉反馈强度的最佳模式.然后分析了不同双相脉冲幅值和脉宽作用下,人体被刺激电流作用部分,即刺激电极至接地电极回路两端的电压波形,并确定了最优的正负电荷量比值.最后,将使用该正负电荷比的双相刺激电流脉冲与仅使用单相刺激电流脉冲的识别准确率进行比较,还将该实验结果与相关文献中电触觉反馈强度识别实验结果进行了比较.
3.1 电触觉最佳刺激范式
图10 显示了不同接地电极位置、电流频率和电极阵列对应的强度识别准确率实验结果.其中,S-1.77 和S-0.89 分别表示边长为1.77 mm 和0.89 mm 的方形电极;R-1.00 和R-0.25 分别表示内径为1.00 mm和0.25 mm 的环形电极;C-1.00 和C-2.00 分别表示直径为1.00 mm 和2.00 mm 的圆形电极
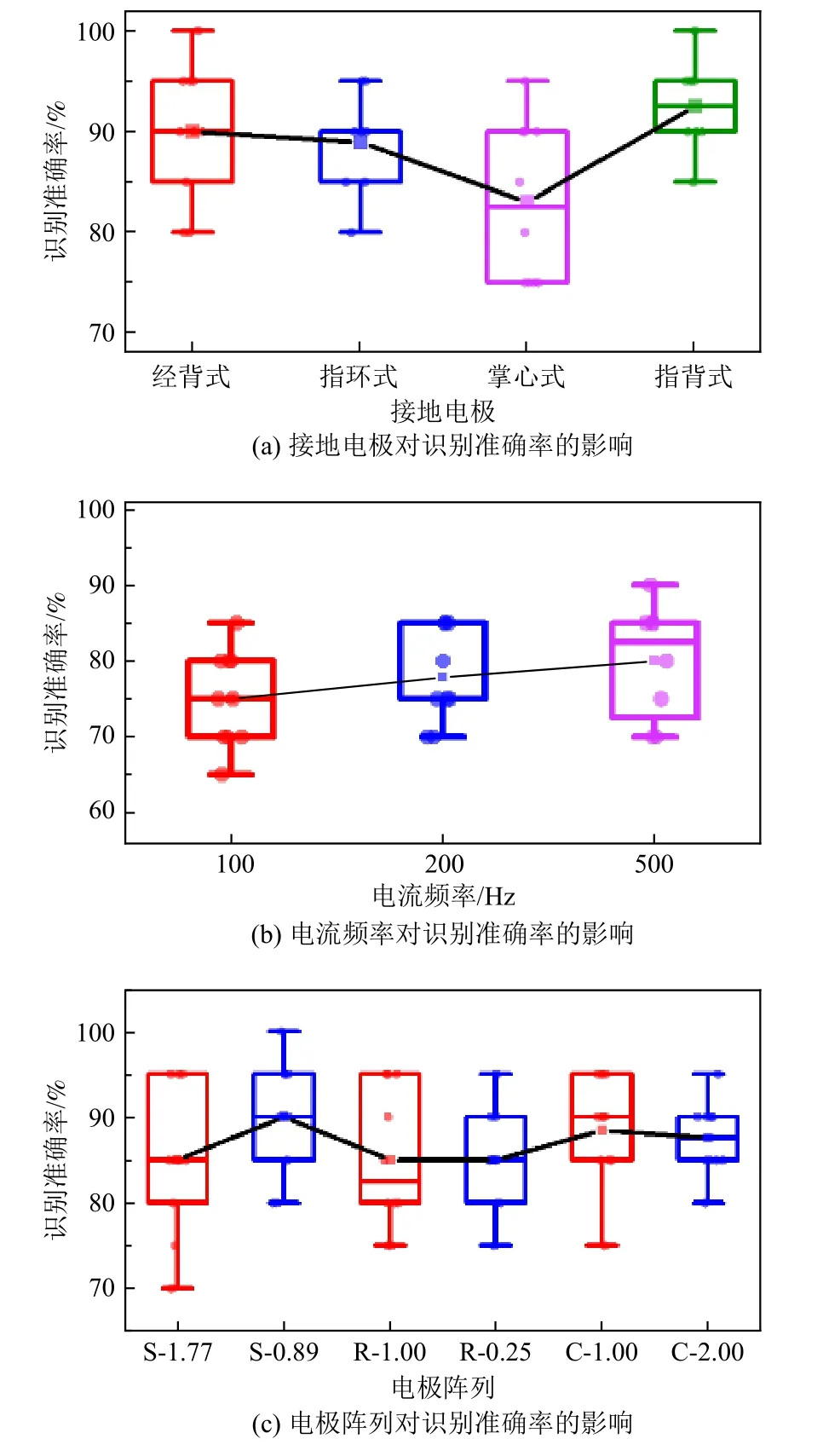
Fig.10 Experimental results of intensity identification图10 强度识别实验结果
1)接地电极.指背接地电极对应的强度识别准确率最高,实验数据的分布也最集中.
2)电流频率.各频率对应的识别准确率波动范围无明显差异,但500 Hz 对应的准确率高于其他频率.
3)电极阵列.在这些电极阵列中,直径为1 mm的圆形电极阵列对应的识别准确率数据最集中,其次是边长为0.89 mm 的方形电极阵列.通过比较各电极阵列对应的准确率均值,可以得到边长为0.89 mm的方形电极阵列对应的识别准确率最高.因此,我们认为边长为0.89 mm 的方形电极阵列是最佳选择.
综上所述,最佳的电触觉组合刺激范式是电流频率为500 Hz、边长为0.89 mm 的方形电极阵列以及指背接地电极方式.
3.2 强度分级识别实验结果
3.2.1 单相刺激电流脉冲实验结果
根据3.1 节建立的电触觉最佳刺激范式,我们进行了实验来评估使用单相刺激电流脉冲的强度识别准确性.结果表明强度划分为四级、五级和六级对应的平均识别准确率分别为92%、76.5%和64%.
3.2.2 双相刺激电流脉冲实验结果
1)正负电荷量比值优化.当施加双相刺激电流脉冲的正负电荷量比值为1 时,不同脉宽比对应的人体被作用部分的回路两端体电压波形结果如图11所示,其中R0表示刺激电流负脉宽与正脉宽的比值.

Fig.11 Body voltage waveforms corresponding to different R0 when positive charges are equal to negative charges图11 正负电荷量相等时不同R0 对应的体电压波形
为了研究正负电荷量比对体电压波形的影响,本文对不同正负电荷量下不同正负脉宽比的人体电压波形进行了测试.实验结果如图12 所示,其中R1表示刺激电流正脉宽与负脉宽的比值,R2表示刺激电流的正电荷量与负电荷量的比值.本工作使用互相关系数来定量刻画理想情况下人体电压波形和测量得到的人体电压波形之间的相似程度,互相关系数计算公式为:
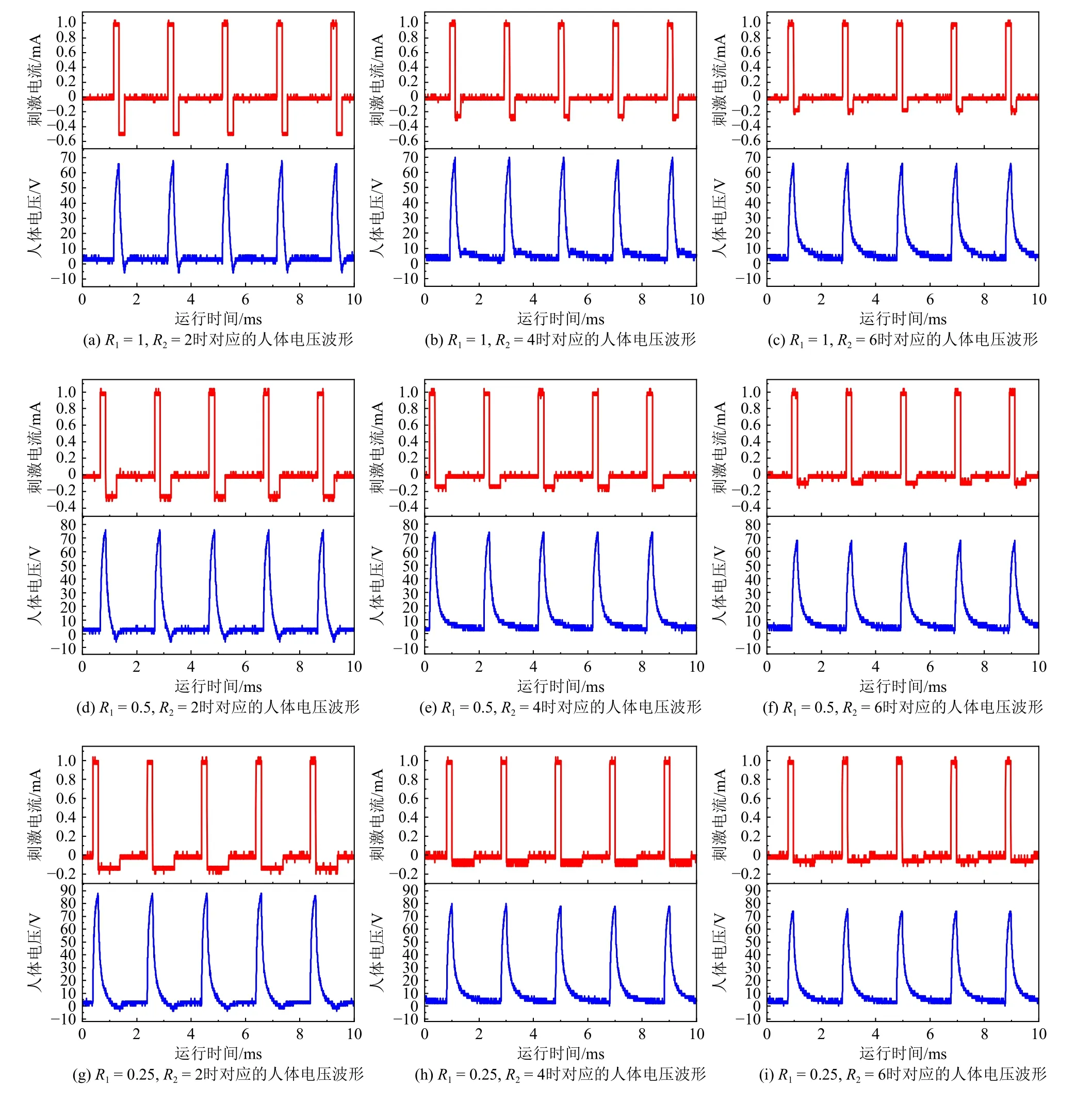
Fig.12 Body voltage waveforms corresponding to different R when positive charges are unequal to negative charges图12 正负电荷量不等时不同R 对应的体电压波形
其中x(i) 表示理想情况下的人体电压波形,y(i)表示测量得到的体电压波形,和分别表示x(i)和y(i)的平均值.
根据2.2 节中对理想情况下人体电压波形的分析,本工作将脉宽为0.18 ms 的窄脉宽三角波等效为理想情况下的人体电压波形.
通过计算,图11 和图12 中各波形对应的互相关系数如表6 所示.从表6 可以发现R1=1,R2=4时人体电压测量波形对应的互相关系数是最大的.因此,其对应的人体电压波形最接近理想冲击波形.此外,通过比较不同正负脉宽比对应的电压波形,可以发现人体电压波形达到峰值后的恢复速度受到R1的显著影响.具体来说,R1=1 会有更快的恢复率.基于上述结论,本研究中使用的电刺激模态被优化为正负脉宽比R1=1 和正负电荷比R2=4 的双相刺激电流脉冲.
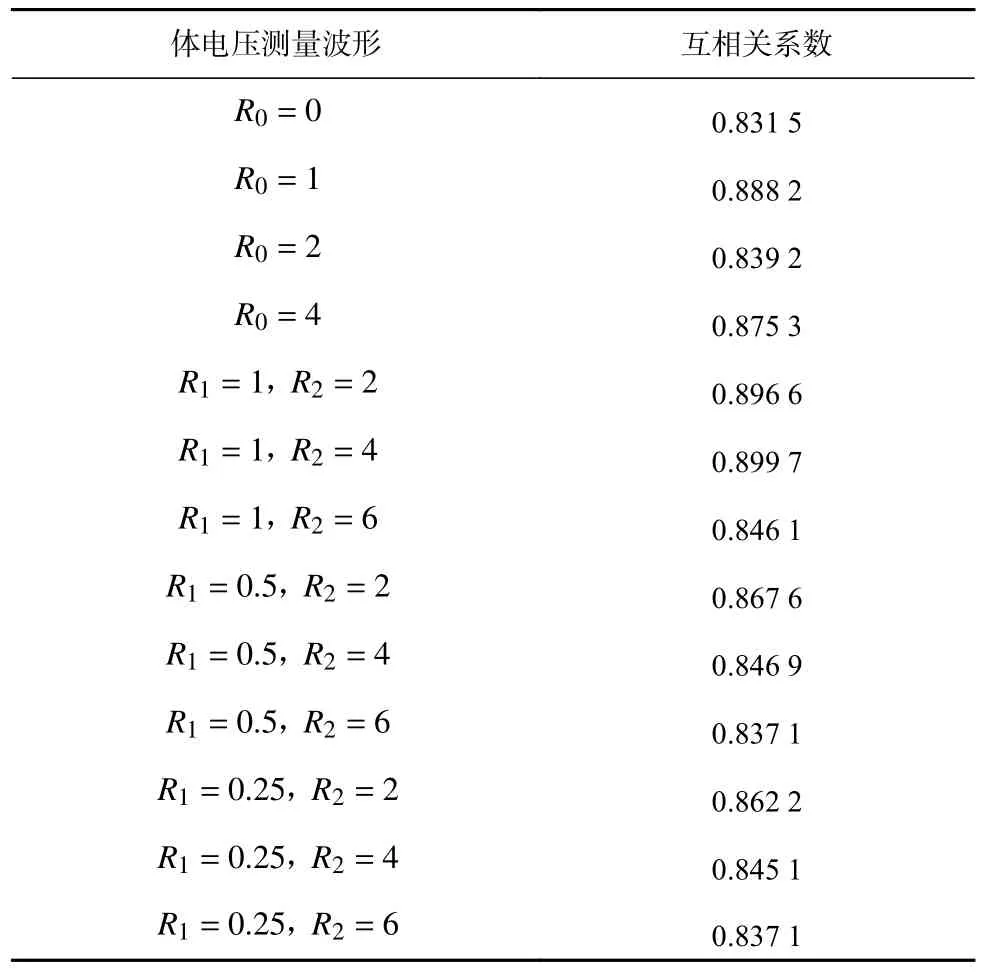
Table 6 Cross-Correlation Coefficient for Each Waveform表6 各波形对应的互相关系数
2)强度识别实验结果.采用正负电荷量比值优化后的双相刺激电流得到的四级、五级强度识别准确率分别为93.3%和81.7%,与采用单相刺激电流的四级、五级强度识别准确率92%和76.5%相比略有提高.各强度识别混淆矩阵如图13 和图14 所示,可以发现受试者易将高强度等级判断为低强度等级,我们认为这是由于在电流长时间作用后,受试者手指适应了电流的刺激,对电触觉反馈的感受灵敏度有所下降.
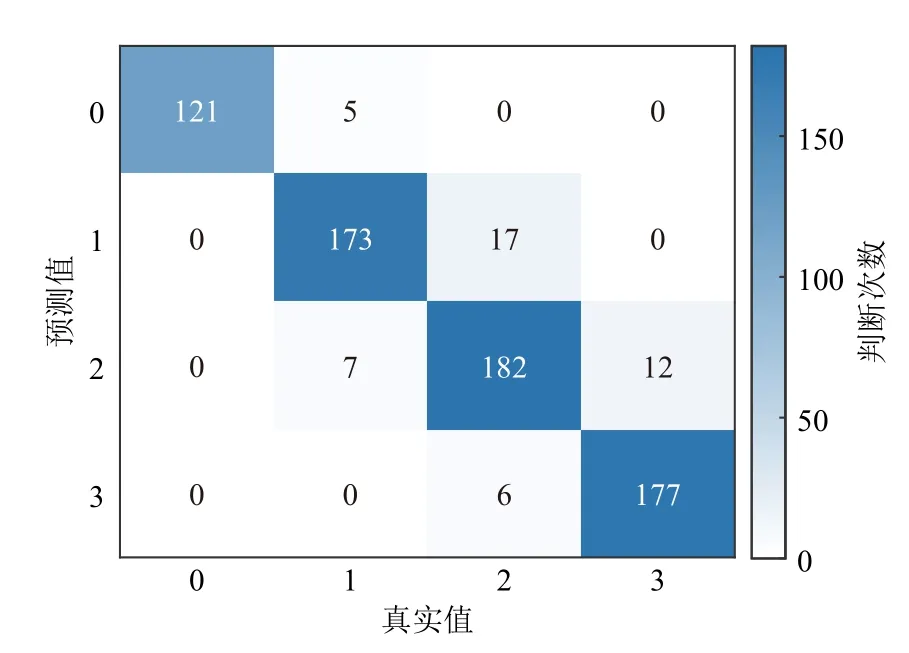
Fig.13 Four-level tactile feedback intensity recognition result图13 四级触觉反馈强度识别结果
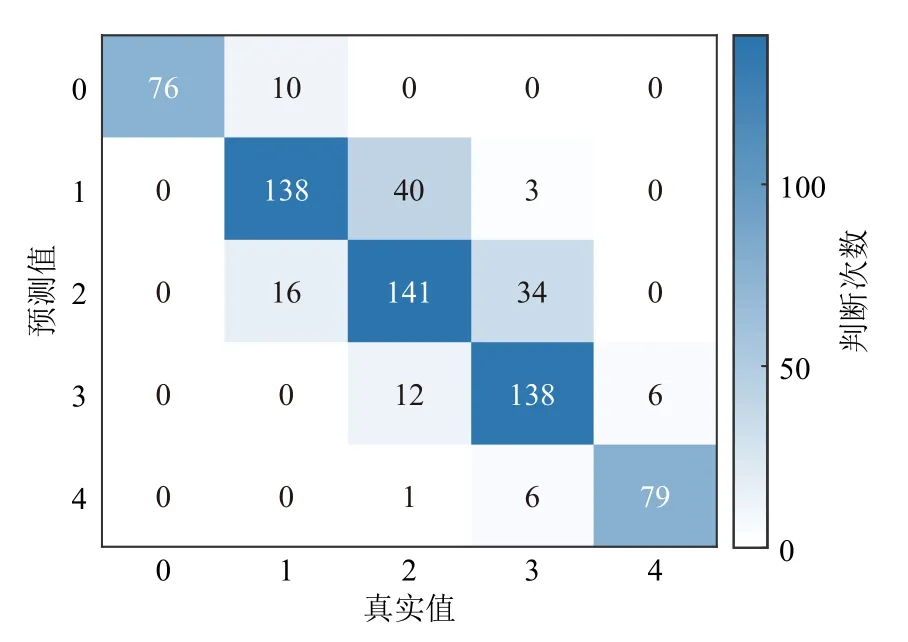
Fig.14 Five-level tactile feedback intensity recognition result图14 五级触觉反馈强度识别结果
3.2.3 触觉反馈不适度实验结果
本节分别记录在双相脉冲刺激电流和单相脉冲刺激电流作用下,35 名受试者对微电流触觉反馈过程中的不适度评分,其中0 表示无不适,10 表示最强烈的不适.收集和记录每个受试者的主观感受数据,实验结果统计如图15 所示.
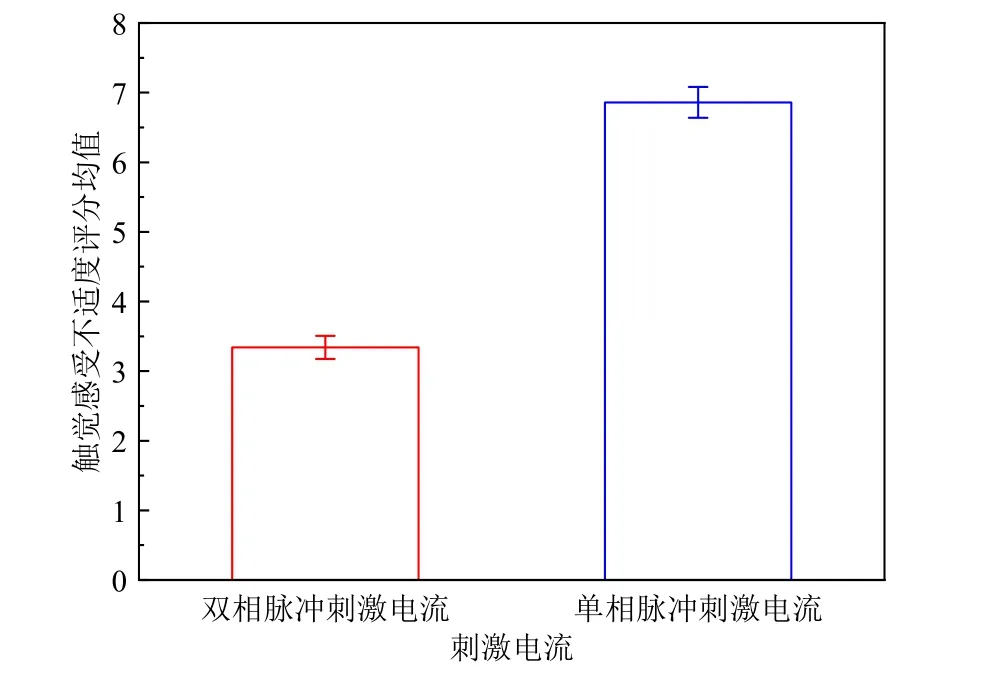
Fig.15 Discomfort scoring experiment results during tactile feedback process图15 触觉反馈过程不适度评分实验结果
由图15 可知,实验组(双相脉冲刺激电流)的平均不适感受评分为3.34,标准误差为0.17;对照组(单相脉冲刺激电流)的平均不适感受评分为6.86,标准误差为0.22.从图15 可以看出,实验组的平均不适感受评分显著低于对照组.对数据样本进行t 检验后,发现双相刺激电流组的不适度评分与单相刺激电流组之间存在显著差异(P值<0.01),这说明正负电荷量比值优化后的双相刺激电流可以有效减少微电流刺激对人体造成的不适.
3.3 讨论
我们的研究在4 个强度等级上达到了93.3%的识别准确率,这明显高于以前研究中通过调整电流脉冲宽度获得的59.1%[13]和85%的识别准确率[33].文献[12]在手指部分使用双相电流脉冲,通过调节刺激电流的脉冲频率,对4 个强度等级的识别准确率达到76.2%.对于5 个强度级别的识别,我们的研究取得了81.7%的识别准确率,远高于通过施加机械振动获得的54%的识别准确率[9]和通过分别调整刺激手臂电流的脉冲频率和振幅得到的72.5% 和73.5%的识别准确率[38].
值得注意的是,文献[12, 13, 33, 38]将强度识别准确率定义为同时识别3 个或更多强度等级的准确程度.同时,一些研究将强度识别准确率定义为判断相邻2 个等级的强度是否发生变化的准确程度,即每次识别只涉及对3 个强度等级的识别.例如,文献[6]使用高频电压刺激来研究受试者对相邻强度等级的识别准确率,发现当将触觉反馈的强度分别划分为10 个等级和20 个等级时,识别准确率分别为100%和85%.
表7 为本文讨论的2 种触觉强度识别准确性研究的综合比较.图16 为本文在对电刺激模态进行优化的基础上,研发设计的小型化可穿戴式触觉反馈设备及其对应的虚拟现实交互场景应用实例.
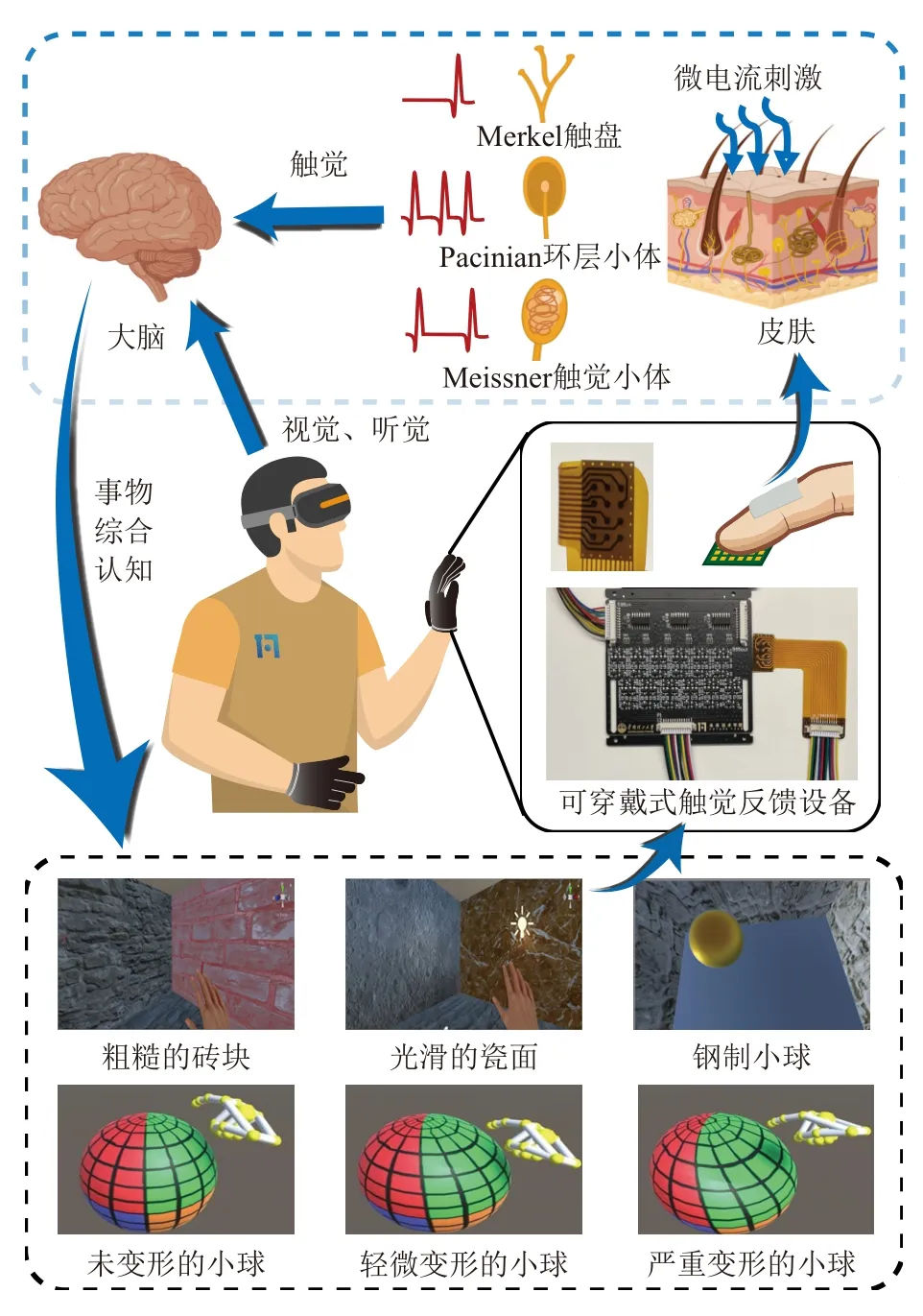
Fig.16 Wearable tactile feedback devices for virtual reality interaction scenario图16 面向虚拟现实交互场景的可穿戴式触觉反馈设备
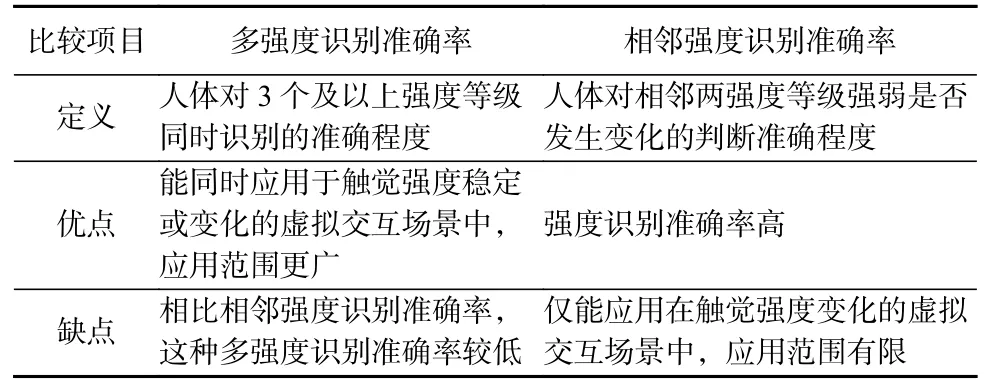
Table 7 Comprehensive Comparison of Two Tactile Intensity Recognition Accuracy Studies表7 2 种触觉强度识别准确性研究的综合比较
本研究中对35 名受试者进行的强度识别准确性实验结果证明了本文开发设计的多强度电触觉反馈系统的有效性.该系统通过在电流参数、电极阵列设计和接地电极位置3 个关键方面改进电触觉反馈刺激模式,并引入双相电流脉冲,优化正负电荷量比值.研发设计的多强度电触觉反馈系统实现了舒适而精确的电触觉反馈,有效解决了多强度电触觉反馈研究中的低准确率问题.
然而,需要注意的是,当强度划分为6 个等级时,由于相邻两强度等级对应的电流幅值相差较小,本文得到的六级强度识别准确率仅为64%.表8 为未经训练的受试者触觉强度识别准确率的比较.

Table 8 Comparison of the Accuracy of Tactile Intensity Recognition in Untrained Subjects表8 未经训练的受试者触觉强度识别准确率的比较
文献[45]通过最小可觉察实验选择参数,在手臂上测试得到的四级、五级和六级强度识别准确率分别为95%、80%和74%,其中四级强度和六级强度识别准确率分别高于本文得到的93.3%和64%的强度识别准确率结果.然而,文献[45]研究的是人体手臂部位的触觉反馈强度识别准确率,其圆形刺激电极直径为9.5 mm,电极间距为12.0 mm,电极尺寸和间距远大于本文用于产生触觉反馈的方形电极阵列(边长为0.89 mm,间距为2 mm),其能覆盖的触觉感受器范围更大,这意味着人能感受到的触觉信息将更多.
但是在人机交互过程中,对手指尤其是指尖部分提供的触觉反馈是十分必要的.本文所提出的电极阵列设计方法,在1.5 c m2上实现了24 点的触觉反馈,能在人体有限的手指指尖表面上保持较高的触觉反馈强度识别准确率.因此,本文所提出的触觉反馈方式具有尺寸小、应用范围广以及识别准确率高等优势,可以用于人体手指表面来产生触觉反馈.
4 总结
本文探究了电流参数、电极阵列设计和接地电极位置对电刺激触觉效果的影响模式,研究适用于虚实融合人机交互的更优的电刺激模态.据此研发设计了舒适而精确的多强度电触觉反馈设备,该设备不仅能够提高受试者的舒适度,还能实现多强度电触觉反馈的高准确率识别.未来,该小型化可穿戴式电触觉反馈设备能应用于多种虚拟现实交互场景中.然而,当触觉反馈强度划分超过五级时,其识别准确率仍有待提高.为了解决这个问题,未来的工作将着重研究拘束扩散,避免大强度电流因为扩散效应造成深度组织的电流密度变小,探索触觉感受器相应的最佳频率、波形等.
作者贡献声明:谭铭昱、花浩镪和熊奇炜并列第一作者,负责整个项目研究思路;谭铭昱负责完成实验方案和论文初稿的撰写;花浩镪负责实验结果数据分析和论文写作优化;熊奇炜负责项目整体的架构调整与优化;朱齐负责完成实验方案和实验结果数据整理;舒琳与徐向民负责指导实验框架设计和技术方案,并审阅、修改和完善论文;梁家铭和魏磊提出了在实际系统中的应用思路并探索实现;黄国志和曾庆负责对实验进行伦理审查并对实验设计和过程进行优化调整.
