基于多传感器的大跨度隧道消防报警控制技术
2023-09-22严小亮
严小亮
(柳州城市职业学院,广西 柳州 545036)
0 引言
随着隧道技术的迅速发展,各类隧道工程的建设为公路运输、经济的发展提供了方便,同时也对隧道的消防安全提出了新的挑战。连续的大范围火灾表明,如果不在隧道火灾初期加以有效的控制,将会造成巨大的经济损失,甚至出现人员伤亡。王培平等[1]提出基于物联网技术的设备联动方法,采用近距离无线感应技术处理消防巡查信息,通过智能识别卡将信息传输至监视平台,再通过云平台传送给远端处理器进行处理,获取报警内容;王佳等[2]提出基于BIM的设备联动方法,通过格式模型轻量化展示消防架构,结合BIM工具化处理方式,整理几何信息与非几何信息,实现消防设备的智能联动。然而,使用这两种方法容易受到诱导信息影响,传输的消防信息存在伪造性,联动效果不佳。为此,本文提出了基于多传感器的大跨度隧道消防报警控制技术。
1 工程概况
广西大浦高速公路某大跨度隧道为双向隧道,左线全长1 105 m,右线全长1 140 m。在隧道的入口处和右侧的隧洞中有一定的偏置,工程地质条件不佳,在隧洞施工过程中容易出现大变形、塌方等危险,并且建设周期较长,施工困难。
该隧道内的视频监控系统为一种基于视频的仿真监测系统,由于观测角度有限,很难对隧道中的其他报警进行有效的观测。
2 基于多传感器的大跨度隧道消防报警控制技术
2.1 监控装置和消防报警联动控制原理
由于火灾报警系统和视频监测系统不能形成有效的联动控制,有太多的环节需要人为思考,不仅会影响到灭火效率,还会使火灾蔓延,造成严重后果。因此,需要通过高清视频监控系统与火灾报警系统的联动控制技术[3],准确地判断喷水口的位置,防止人工判断错误,影响救援工作效率[4]。
2.1.1 烟雾传感器智能检测装置
视频监控系统能够辅助定位隧道内喷水口位置,基于该情况,设计了一种基于多传感器技术的烟感器智能联动监控装置,如图1所示。

图1 烟雾传感器智能监控装置示意图
由图1可知,该系统由采集、处理、通信三大模块组成,采用多个烟感器进行烟雾浓度数据采集和数据的交互、传输,并由服务器进行数据的存储与分析[5],最后通过监测装置将所检测的数据传送至多台传感器及遥控终端,实现对各种异常状况的实时、无死角追踪。
2.1.2 烟雾传感器联动控制检测报警
在烟感器智能联动控制监控装置下,设计联动控制报警流程如下:
步骤一:通过管理平台能够实时监测双波长串行信号,在监控到火情的情况下,系统界面会自动将报警信号收集到管理平台[6],并在讯息面板中显示报警信息。
步骤二:当GIS位置坐标中的报警装置点开始闪动时,屏幕中心显示聚集的报警点位。
步骤三:火灾点烟感器在收到火灾报警信息后,会在客户端和大屏幕上显示相应的烟雾浓度数据。
步骤四:在控制面板中,如果确定发生火灾,面板将自动打开烟雾传感器进行烟雾浓度扫描;如果出现错误的警报,则自动记录为虚警,并向ifix5发出指令,ifix5会把执行结果反馈给管理平台,并将其结果记录在日志中。
2.2 基于多传感器技术的灭火联动控制
2.2.1 位置传感器火情坐标定位
通过一个单一的参照节点,对跳数传播过程进行研究,如图2所示。
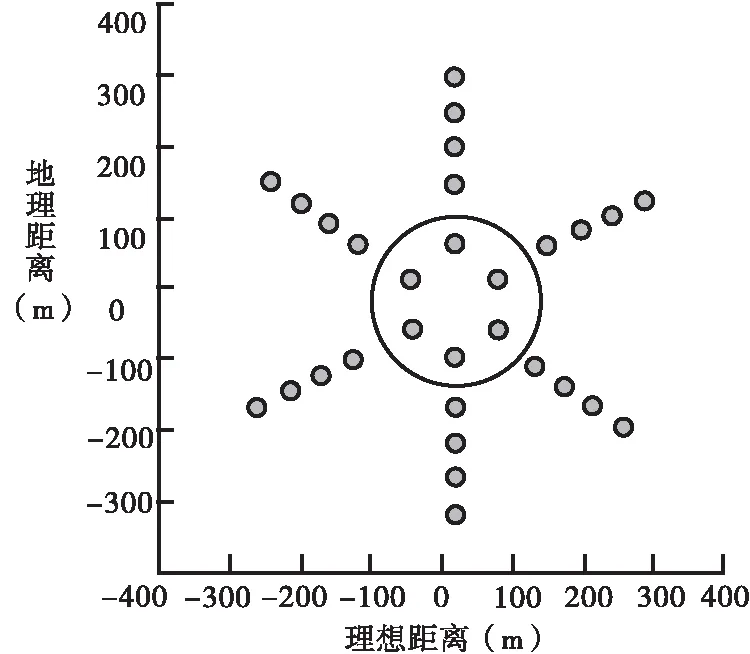
图2 跳数传播过程示意图
由图2可知,通过获取其他基准节点的位置和间隔跳数,得到各基准节点的平均每跳距离,并将其作为校正值广播到网络中[7]。参考节点i的平均每跳距离,其计算公式为:
(1)
式中:sij——节点i到j的跳数;
(xi,yi)、(xj,yj)——节点i和j的坐标。

(2)
将式(2)表示为线性方程形式,使用最小均方差估计方法,能够得到节点k的坐标:
X=(RTR)-1RTa
(3)
当RTR的值为非奇异值时,节点k的坐标就是一个唯一值。
2.2.2 灭火联动控制方案
通过对烟雾传感、位置传感器的联动控制,能够获取火灾位置、火情大小,从而实现智能消防报警的应急措施。此处通过与监视装置的联动控制,设计了声光报警模块,与其他装置的输出接触点相连接,如图3所示。
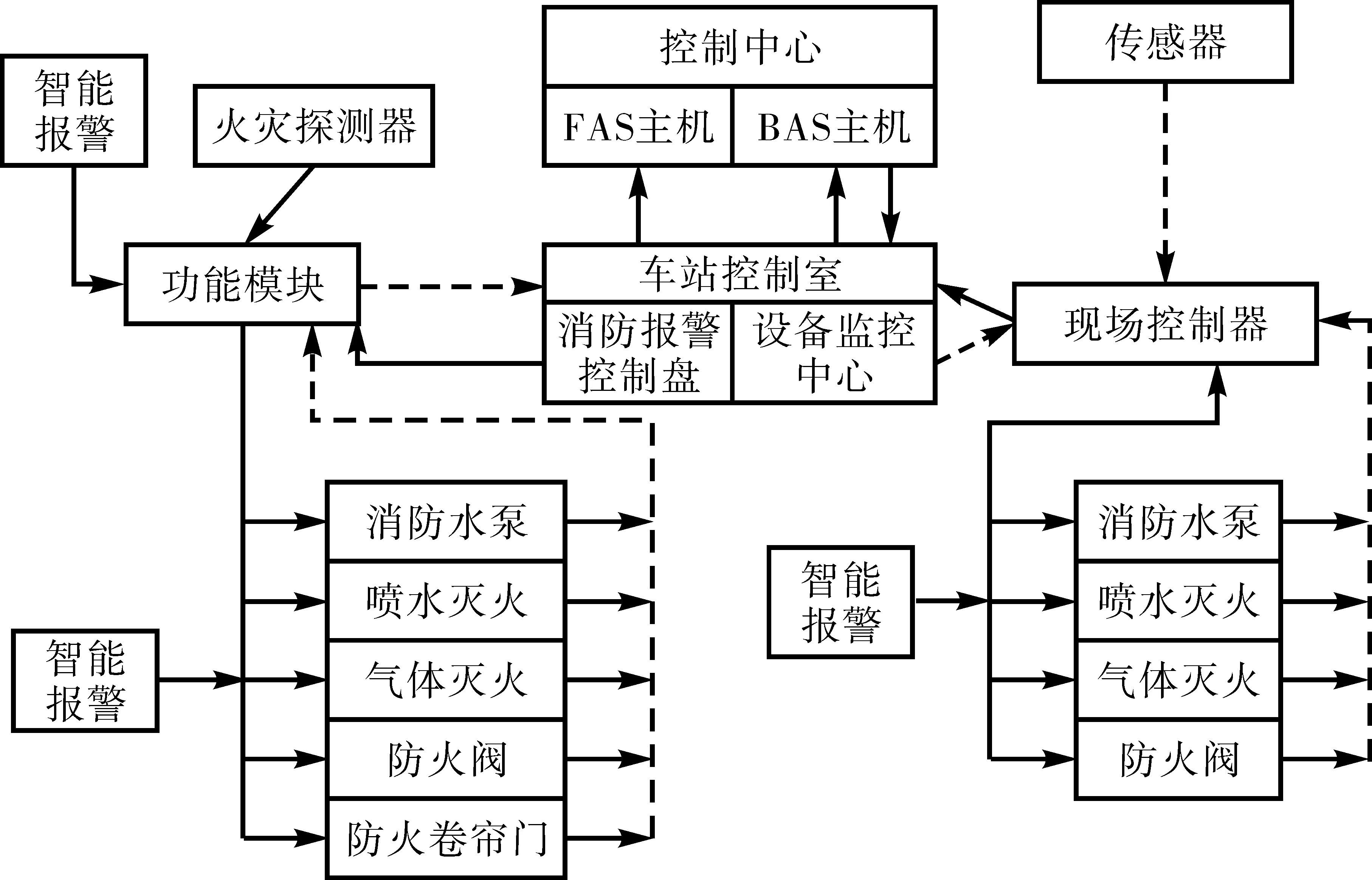
图3 灭火联动控制方案示意图
由图3所知,当火灾发生时,火灾探测器会同时向消防管理计算机和现场火灾报警控制器发出讯号。该系统能将火灾现场的数据转移到消防屏幕上,实现了声光的同步联动控制[8]。当消防水泵启动时,供水系统自动连接,锁定水源,开启阀门,精确控制火焰。当火焰完全熄灭时,阀门会自动关闭,也能开启气体灭火装置,达到自动灭火目的。
3 试验
3.1 试验平台的搭建
以广西大浦高速公路某大跨度隧道为例,搭建试验平台,如图4所示。
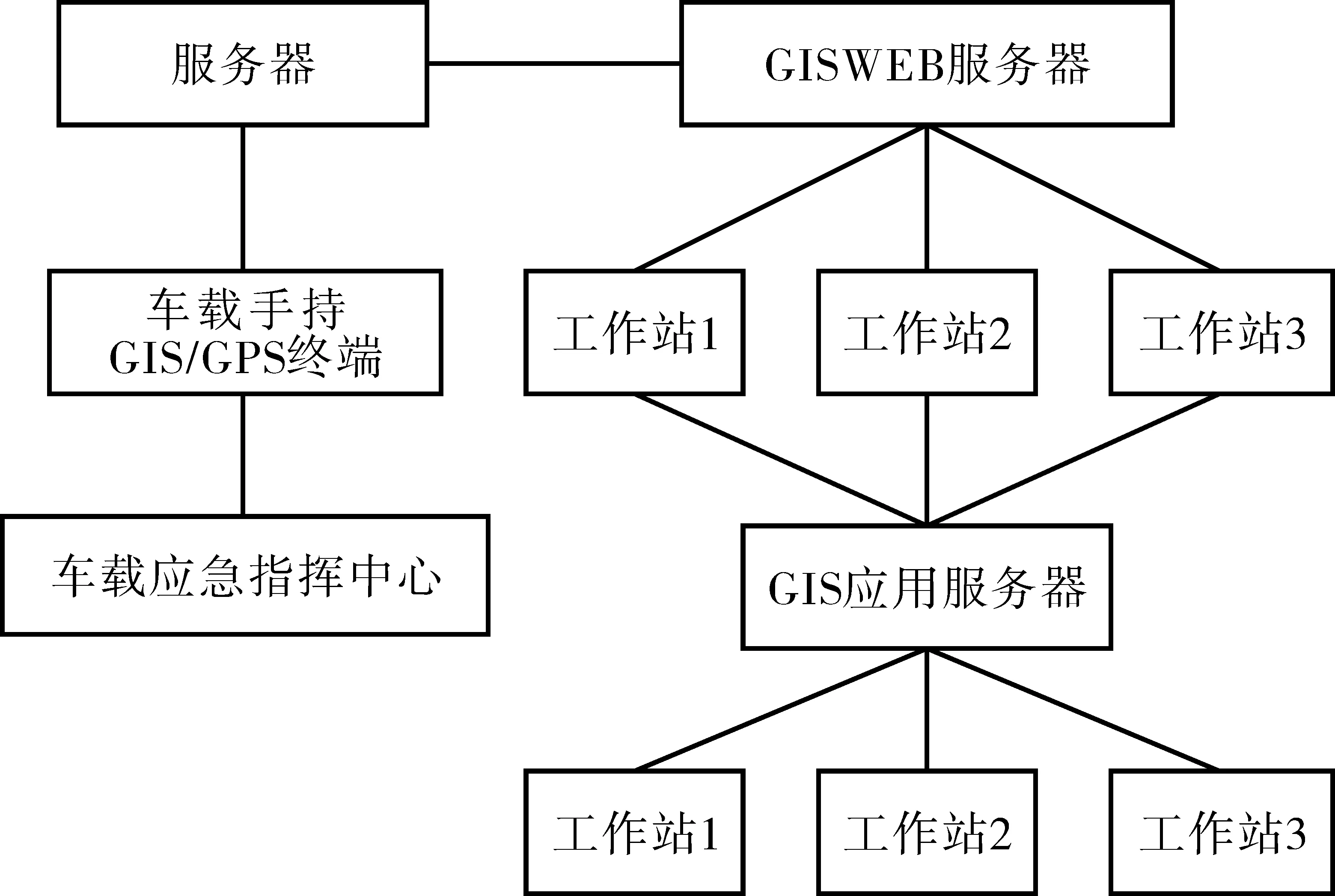
图4 试验平台示意图
以图4为例,通过GIS位置坐标直观地展示了该隧道的断面效应,在隧道内设立多个探测器装置,与火灾监控中心互联,从而可以实时地将隧道各报警所获取的数据信息反馈到GIS环境中,实现对各种异常情况的实时追踪。
3.2 火灾定位精准度对比分析
为了验证所提方法的可行性,进行试验。在火势蔓延区域,预设着火点位置,如下页图5所示。
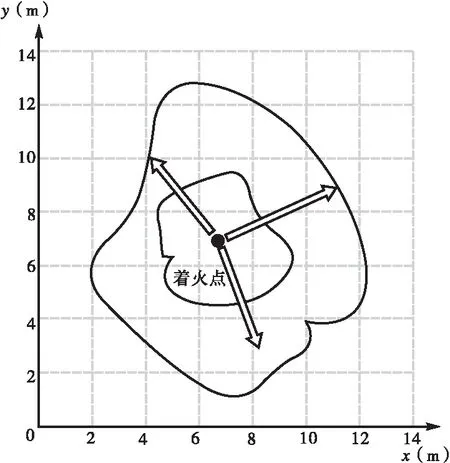
图5 火势蔓延位置示意图
以图5为依据,对火灾定位精准度进行分析,结果如图6所示。

图6 3种方法火灾定位精准度对比散点图
由图6可知,使用基于物联网技术的报警联动控制方法定位的着火点位置有5个,使用基于BIM的设备联动方法定位的着火点位置有9个,均与实际着火点(6.8,7.0)不一致;使用基于多传感器的控制技术定位的着火点位置有两个,坐标分别为(6.9,7.1)、(7.0,6.9),与实际着火点(6.8,7.0)相差不大,基本一致。
通过上述研究结果可知,所提方法能够精准定位火灾位置。
3.3 联动控制时间对比分析
分别使用基于物联网技术的设备联动方法、基于BIM的报警联动控制方法和基于多传感器的控制技术,对比分析联动控制时间,如表1所示。

表1 3种方法联动控制时间对比分析表
由表1可知,在火灾蔓延范围为14 m时,使用基于物联网技术的设备联动方法,联动控制时间为41 s;使用基于BIM的设备联动方法,联动控制时间为35 s;使用基于多传感器的控制技术,联动控制时间为18 s,说明该方法运行速度快,联动控制效率高。
4 结语
通过上述试验可知,基于多传感器的大跨度隧道消防报警控制技术,在广西大浦高速公路某大跨度隧道内得到了广泛的应用。该方法可以实现对火灾的精确定位,有效地提高现场应急反应能力,从而实现灭火自动化,降低火灾损失,增强隧道消防安全。
