基于ESC的电动汽车再生制动策略及能量回收
2023-09-21李会杰张学礼
郝 磊,李 峰,李会杰,张学礼
(1.西安交通工程学院,机械工程学院,陕西 西安 710032;2.西安交通大学,机械学院,陕西 西安 710048;3.中车唐山机车车辆有限公司,河北 唐山 064099)
1 引言
随着汽车尾气排放量的增加,空气质量也发生了持续恶化[1-2]。同时因为石油是一种不可再生资源,在各国工业化发展过程中,石油被不断消耗,全球范围内的石油储量快速减小,也因此引起了油价的持续上升[3-4]。以新能源汽车代替传统汽车已属于一项非常急迫的研究工作。当汽车处于城市运行工况下时,约有40%的动能会在制动阶段转变成热能而发生损耗[5]。为提升电动汽车节能效果,通常需要为其制动系统配备能量回收结构,这也已经成为电动汽车的一项关键技术,可以将电动汽车制动阶段的动能以电能的形式储存于蓄电池内,制动过程结束后被蓄电池又可以将原先储存的能量重新释放为汽车提供后续行驶过程所需的动力[6-7]。因此,世界各国的汽车制造企业、科研学者都开展了制动能量回收系统方面的深入研究,也取得了较大的技术突破[8-10]。
电机回馈制动力可以为汽车制动过程提供所需制动力,同时为保障汽车制动可靠性,同样也需设置合适的液压制动力来达到理想的制动效果[11]。传统动力形式的汽车进行制动时,制动踏板跟液压制动系统之间属于一种非解耦的关系,须确保制动阶段电机回馈制动过程和液压制动过程达到相互协调状态,以此提升制动阶段对汽车动能的回收效率,因此需要为解耦模式建立线性控制结构[12-13]。某制造商根据线性控制方式,构建了电子制动系统(ECB),实现了对制动能量的高效回收,之后获得了成功推广。
这里构建了可以对电机回馈制动以及液压制动过程进行协调控制的方案,能够满足对车轮轮缸的协调控制效果。通过仿真测试发现,随着制动强度的变化,可实现电机回馈制动力与液压制动力间的良好协调,以此满足制动过程的控制要求,实现制动能量的高效回收。监测方式车轮存在抱死的情况时,ESC液压制动过程可以实现轮缸制动力的动态控制,从而避免车轮发生抱死的问题。
2 电动汽车制动方案
电动汽车制动方案示意图,如图1所示。进行制动操作时,液压调节单元(HCU)先接收制动踏板产生的开度与轮速参数,之后将其传输至整车控制系统(VCU),VCU再结合电池和电机状态实现电机和液压制动力的合理分配;利用电机控制器实现电机的扭矩控制,经减速机构与差速器将作用力传输至驱动轮;利用ESC液压调节单元进行车轮控制,实现液压摩擦制动的效果,经液压管路将作用力传输至液压轮缸[14]。将ESC液压管路按照X型结构进行排列,其中,右前轮和左后轮液压轮缸共同使用同一个液压管路;左前轮和右后轮液压轮缸也共用相同的液压管路。
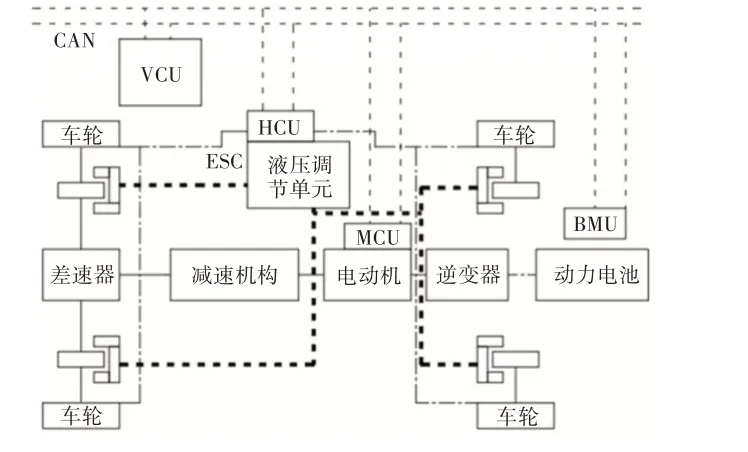
图1 电动汽车制动方案示意图Fig.1 Schematic Diagram of Electric Vehicle Braking Scheme
3 仿真建模
这里设计的电池组中为电池元件同时设置了串联与并联形式。控制单个电池容量为70A·h,电压3.7V,内阻0.0658Ω。每个分支串联了96个电池元件,总共包含了2个并行分支。可以根据荷电状态(SOC)来判断电池电量,该参数表示电池剩余容量与额定容量比值。以下给出了SOC计算式:
式中:SOCinit—电池初期测试得到的SOC;CN—等效电容。对各工况开展仿真测试时,将SOC初始参数设定在95%,在SOC减小至5%时,仿真结束。
选择交流感应电机作为仿真模型,同时以一阶惯性延时模型对电机转矩输出进行仿真分析,得到以下所示的转矩与电机功率表达式[15]:
式中:Tm—电机在实际运行阶段的转矩;t—时间常数;Tlim—电机处于当前转速与电池SOC 条件下可以产生的最大转矩;Pm—电机的功率;ω—电机转速。
电机的具体工作模式:在Pm>0的条件下,电动机保持驱动状态;Pm<0时,电动机进入发电状态。
以AMNSim构建的ESC液压模型,如图2所示。可以利用上述模型对车轮轮缸实施主动增压。在驾驶员未踩下制动踏板的情况下,为制动主缸设置的输入压力ESC模型能够实现车轮防抱死的效果,制动踏板被踩下之后,轮缸依次经过增压、保压以及减压的不同阶段。ESC系统按照与常规过程一致的方式实施增压,主缸压力逐渐增大,此时ESC单元依然处于初始状态,轮缸中开始流入制动液,同时减压阀与吸入阀方式关闭。进入保压阶段后,增压阀保持关闭状态,轮缸中获得恒定的制动液,同时轮缸压力也不发生变化。减压过程中,增压阀保持关闭状态,减压阀开启,这时制动液经减压阀到达蓄能器,实际流量为0,ESC对电机进行运行控制,为柱塞泵提供驱动力,制动液从蓄能器中经吸入阀与增压阀到达制动轮缸,限压阀受到ESC 控制后保持关闭状态,同时减压阀也处于关闭状态。

图2 ESC模型Fig.2 ESC Model
4 控制策略
4.1 制动力分配方案
在满足制动安全性的条件下合理分配各运动轴的制动力,确保制动力达到最优分配状态,同时实现制动能量的高效回收。制动力的实际分配情况,如图3所示。粗实线为分配方案。

图3 基于ECE的前后轴制动力分配方案Fig.3 Braking Force Distribution Scheme for Front and Rear Axles Based on ECE
为实现制动能量的高效回收过程,处于较低制动强度下时,电机回馈制动力可以达到前轴制动制要求。当电机制动力小于前轴制动力的实际要求时,可以利用ESC液压系统使车轮获得相应的液压制动力。
4.2 协调控制策略
根据以上制动力的分配方式,在当前车速条件下判断车辆应选择的最优制动状态。当车速未超过控制门限时,选择常规的液压制动模式;当车速超过控制门限时,首先分析其是否属于紧急制动,进入紧急制动阶段时,不对能量实施回收,只施加液压制动作用,反之发生再生制动过程。再生制动的具体控制结构,如图4所示。
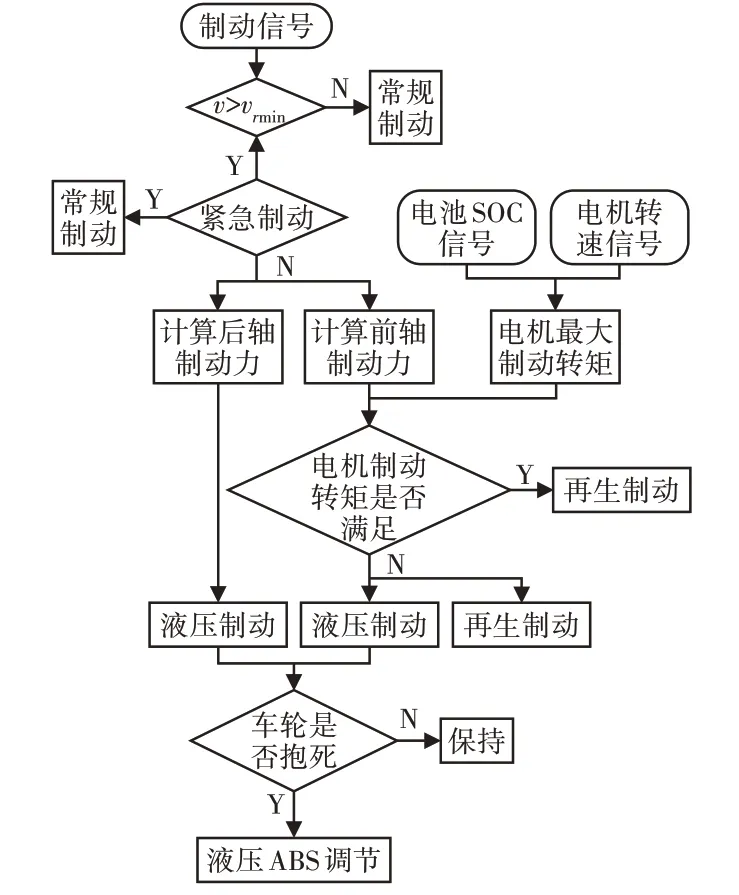
图4 再生制动控制逻辑Fig.4 Regenerative Braking Control Logic
5 仿真结果分析
5.1 制动能量回收
进行仿真测试时,需这对各制动强度,使电机回馈和液压制动过程达到协调匹配的过程,再分析采用的制动控制策略所实现的能量回收效率。当车辆速度由100km/h降低至0的过程中,设定电池最初SOC值为95%。此时路面附着系数为0.8,控制车辆制动强度介于(0.1~0.7),仿真参数,如表1所示。

表1 制动能量回收效率结果Tab.1 Braking Energy Recovery Efficiency Results
分别以根据ECE方法与固定比值方式进行制动能量回收仿真测试,以ECE实现的制动能量回收方案效率更高,同时发现这种差异随着制动减速度的降低变得更加显著。这是因为随着制动减速度提高至某一临界值,电机获得了最高回馈制动力,能量回收状态在这两种控制策略下基本相近。
5.2 制动过程分析
为分析ESC液压制动过程以及电机回馈制动期间ESC对车轮防抱死方面的控制效果,在路面附着系数为0.5的条件下,对车辆速度由最初的100km/h减速至0过程开展仿真测试结果,如图5所示。
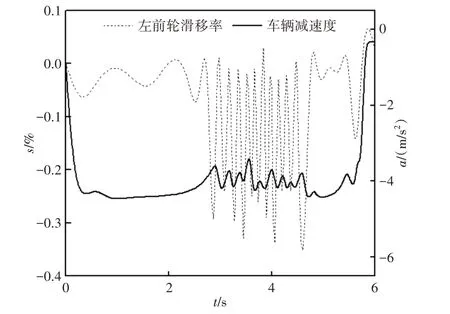
图5 ESC防抱死控制过程Fig.5 ESC Anti-Lock Locking Control Process
当车辆减速度为5m/s2时,液压与电机制动力同时发挥作用,实现协调控制的效果;2.9s时发生了电机制动力的明显波动,液压制动力也一起参与控制,左前轮形成了更大的滑移率,ESC液压制动系统进入防抱死阶段,当主缸压强保持恒定时,左前轮增压阀与减压阀进入动态控制过程,实现轮缸压力的调节功能,避免车轮发生抱死的情况。
5.3 制动能量回收潜力分析
依次针对NDEC、WLTP与ECE各个工况开展仿真测试。不同工况下进行仿真测试所得能量回收结果,如表2所示。本控制方案可以达到更优的车辆控制性能,并实现车辆制动能量的高效回收。这里的控制方式可以使NDEC 工况下的续驶里程提升9.35%,WLTP工况下上升37.2%,ECE工况下上升15.2%。

表2 不同控制策略的能量回收结果Tab.2 Energy Recovery Results of Different Control Strategies
6 结论
(1)以ECE实现的制动能量回收方案效率更高,并且随着制动减速度的降低变得更加显著。(2)当车辆减速度为5m/s2时,液压与电机制动力同时发挥作用,实现协调控制的效果,且轮缸压力的调节功能,避免车轮发生抱死的情况。(3)这里的方案可以达到更优的车辆控制性能,实现车辆制动能量的高效回收。可以使NDEC工况下的续驶里程提升9.35%,WLTP工况下上升37.2%,ECE工况下上升15.2%。
