一种分离加速度变量的直升机动力学仿真方法
2023-09-20刘湘一宋山松
吴 靖,刘湘一,宋山松
(海军航空大学航空基础学院,山东 烟台 264001)
1 引言
直升机旋翼/机体耦合动态响应仿真对于其动稳定性分析[1],特别是非线性动稳定性分析[2-4]等动力学问题具有重要意义,在通过飞行及试验难以获得真实数据样本的情况下,也可为直升机旋翼故障诊断研究提供大量仿真数据样本[5-7],运用软件实现快速准确的动态响应仿真则是其中的关键。
在进行直升机旋翼机体耦合动力学仿真时,需要将位移量和速度量代入动力学模型中,求解加速度量,然后进行迭代[8]。在不进行简化的情况下,桨叶一点的速度及加速度计算公式非常复杂[9],计算气动力、惯性力以及气动力矩、惯性力矩时,需要进行积分,给出其计算公式比较困难。运用MATLAB等软件进行仿真时,可以通过给加速度定义字符变量,在动力学模型中输入位移量和速度量后,对加速度量进行数值求解,但定义字符变量之后的求解速度很慢,每步求解的时间大约为数秒,步长为10-3s,计算20s的响应,需要花费十几个小时。对于直升机旋翼/机体耦合动态响应仿真分析,特别是基于动力学模型的直升机旋翼故障诊断研究,需要大量数据样本的情况,采用此种方法实现起来非常困难。
因此,在不进行小角度线性简化的前提下,保留运动非线性,并通过分离加速度变量的方式给出一种快速的直升机旋翼/机体耦合动态响应仿真方法,用于对其动态响应进行仿真分析。
2 动力学模型
2.1 桨叶任一点的速度及加速度
基于矩阵运算推导了桨叶任一点p在桨叶坐标系xbybzb中的速度和加速度为

(1)

(2)
式中,r1为p点距挥舞/摆振铰的距离,e为挥舞/摆振铰外伸量,xc为桨毂中心距机体重心纵向距离,h为桨毂中心距机体运动轴距离,L1~L6为变量矩阵,由基础的坐标变换矩阵运算而来,直接展开形式复杂,不利于后续的积分计算气动力和惯性力,一般都会进行相应的小角度线性简化,为计入运动的非线性,保留其如式(1)、(2)的矩阵运算形式。
2.2 旋翼运动方程
桨叶作用于挥舞/摆振铰的力矩包括惯性力矩、弹簧力矩、结构阻尼力矩及气动力矩等,因此,第k片桨叶的挥舞运动及摆振运动方程为

(3)

(4)

2.3 机体运动方程


(5)
(6)
式中,Ix、cx、kx分别是机体在滚转方向上的惯性矩、阻尼和刚度;Iy、cy、ky分别是机体在俯仰方向上的惯性矩、阻尼和刚度。
2.4 动力入流方程
作用在旋翼上的气动力是非定常的,对于低频振动的直升机来说,用动力入流模型能较好地描述非定常气动力的作用。
用扩展的Pitt-Peters动力入流模型[10]来描述非定常气动力,其动力入流方程为

(7)



(8)
3 分离加速度变量

(9)
式中,L41、L51和L61为只含位移量和速度量的矩阵,不含加速度量,L42、L52和L62可以表示为
(10)
式中,L421、L422、L423、L424、L523、L524、L623和L624为只含位移量和速度量的矩阵。
在仿真时,根据式(1)和式(9)中的非加速度变量项进行积分计算气动力、惯性力以及气动力矩、惯性力矩,可用于计算式(8)中的b,根据式(9)中的加速度变量项进行积分可计算式(8)中的A,再根据式(8)可计算加速度量,从而实现迭代求解,完成动态响应仿真。
4 动态响应仿真
4.1 主要参数
所用模型为美国NASA采用的无铰旋翼模型,旋翼、机体模型的参数主要取自文献[12],如表1所示。旋翼设定转速为500r/min,桨叶初始安装角为6°,来流角为0°。
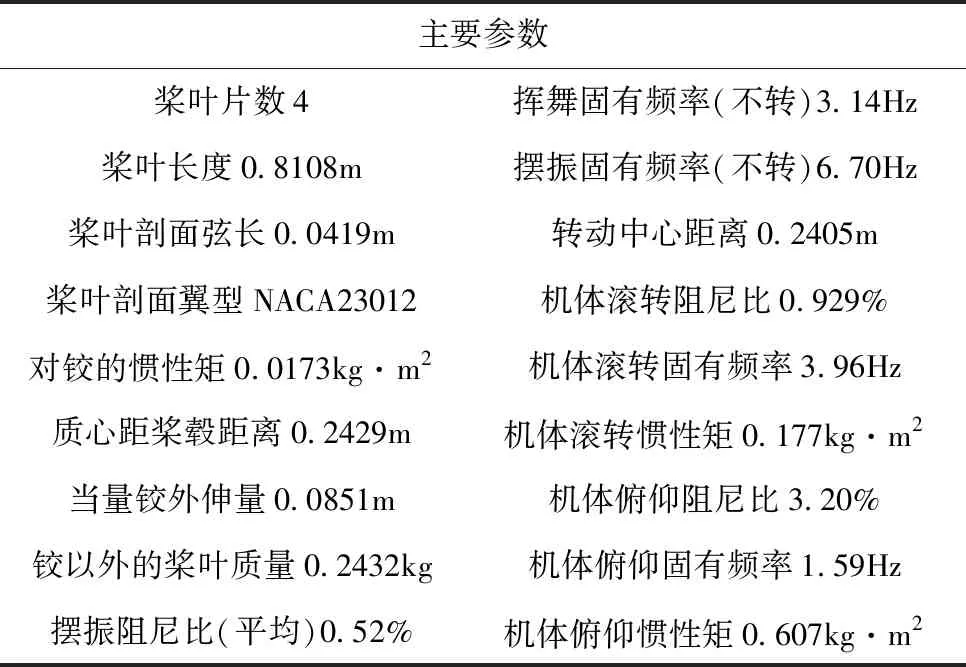
表1 旋翼及机体模型参数
4.2 计算时间对比
采用的仿真软件为MATLAB,迭代算法为四阶龙哥库塔算法,采用分离加速度变量的方法和定义加速度字符变量的方法分别进行仿真,步长为10-3s,分别计算20次。两种方法每步计算时间分布如图1所示。

图1 计算用时对比
由图1可知,仿真时,采用分离加速度变量的方法每步计算平均用时为0.0033s,而定义加速度字符变量的方法每步计算平均用时为3.24s,前者仅为后者的1‰。采用分离加速度变量的方法计算,步长为10-3s,历程为20s的动态响应只需要1min左右,可以快速为基于动力学模型的旋翼故障诊断研究提供大量数据样本。
4.3 仿真结果
以旋翼桨距不平衡为例,验证所提仿真方法的有效性。设定直升机第1片桨叶两种桨距不平衡的情况,其安装角分别对应5.9°和6.1°,各桨叶挥舞运动的动态响应如图2所示,为与桨距平衡的情况进行对比,图中给出了第1片桨叶桨距平衡时的挥舞响应(旋翼桨距平衡时各桨叶挥舞角相同,旋翼共锥),机体响应如图3所示,桨距平衡时,机体滚转和俯仰角均为0。
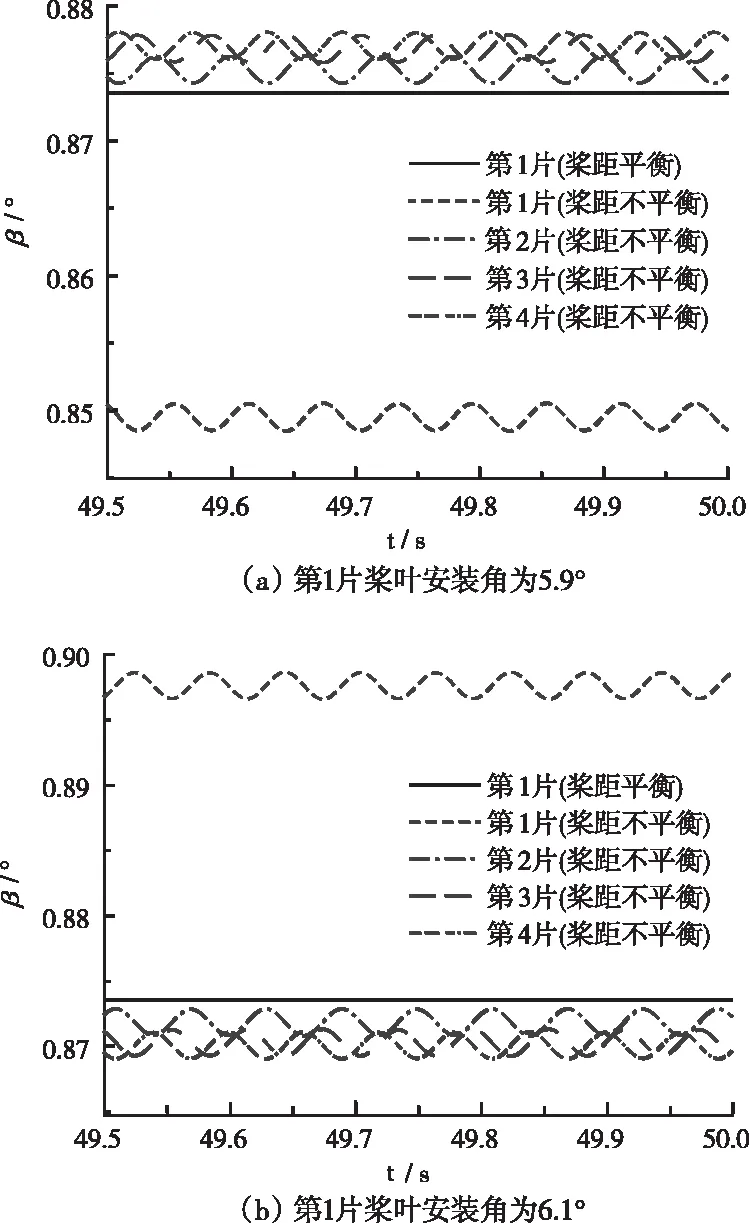
图2 桨叶挥舞响应

图3 机体响应
由图2可知,旋翼桨距不平衡时,各桨叶挥舞不一致,引起旋翼不共锥,不平衡桨叶自身偏离平衡值最严重,约为2.76%。不平衡桨叶对其它桨叶也有影响,其它桨叶中后续第1片桨叶,即第4片桨叶所受影响最大,约为0.4%,后续第3片桨叶,即第2片桨叶所受影响最小,约为0.18%。分析可知,对于安装角小于初始安装角的情况,不平衡桨叶桨距减小,产生向下的诱导速度减小,后续桨叶在诱导速度减小的情况下,升力增加,挥舞值增加,如图2(a)所示;而安装角大于初始安装角的情况,结果相反,使得后续桨叶挥舞值减小,如图2(b)所示。
由图3可知,桨距不平衡,旋翼作用在机体上的力矩不平衡,引起机体振动。由图3(a)和(b)对比可知,第1片桨叶安装角小于和大于初始安装角两种情况使得作用在机体上的不平衡力矩方向相反,因此引起机体的动态响应相位相差180°。算例中引起机体的振动幅值较小,滚转幅值仅为0.0019°,俯仰幅值为0.00037°。经计算第1片桨叶桨距不平衡为10%,即安装角为5.4°或6.6°时,引起机体的滚转幅值也仅为0.011°,俯仰幅值为0.0022°。
5 结论
直升机旋翼机体耦合动力学模型中,为计入运动的非线性,保留了桨叶任一点速度和加速度计算公式中的变量矩阵形式,使用MATLAB等软件进行仿真时,采用定义加速度符号变量的方式,计算时间过长,而采用所提出的分离加速度变量的方法,计算时间可大大缩短,能快速地为基于动力学模型的旋翼故障诊断研究提供数据样本。采用分离加速度变量的仿真方法,对桨距不平衡故障的情况进行了计算,结果表明该方法能有效地将桨距不平衡对旋翼和机体动态响应的影响规律仿真出来,可为直升机旋翼不平衡故障诊断研究提供参考。
