无人船系统在淮安四线船闸工程流量测验中的应用
2023-09-20周绍阳,陈健健,蒋建平
周绍阳,陈健健,蒋建平


摘要:无人船凭借其灵敏性强、运行速度快、方便便捷等优势,目前已广泛应用于水质监测及水下地形测量领域,但在水文流量测验领域应用较少。主要介绍了无人船系统的组成、测流原理以及技术优势,并结合淮安四线船闸工程水文流量测验,详细介绍无人船系统测流的方法并分析影响测验精度的因素。结果表明:基于北斗高精度全球定位系统与无人船自动控制技术的无人船系统,不仅提高了测流效率,降低了人员涉水风险,且在复杂水域条件下,精度可靠。
关键词:流量测验; 无人船; ADCP; 淮安四线船闸
中图法分类号:P332.4文献标志码:ADOI:10.15974/j.cnki.slsdkb.2023.09.003
文章编号:1006-0081(2023)09-0015-05
0引言
流量是单位时间内通过江河某一横断面的水体体积,是反映江河等水体水量变化的基本数据,也是河流最重要的水文特征值[1]。传统的流速仪、浮标等测流方法逐渐被走航式声学多普勒流速剖面仪(ADCP)测流方法取代 [2-4]。然而,基于缆道拖拽三体船的走航式ADCP测流,需要布设缆道,适用于断面窄且无通航需求的基本水文断面,在工程流量测验中应用较少,基于人工船的走航式ADCP测流,在实际工程应用中普遍存在租船困难、仪器安装费时、面对浅滩水域测量精度不高等问题[5-7]。无人船是无人驾驶船的简称,一般是以有动力的船体为平台,搭载通讯设备、控制设备和特殊功能设备,开展某项特殊工作[8]。当前无人船的研究主要集中在军事领域[9-10],近年来,随着科技的发展,基于北斗高精度全球定位系统与无人船自动控制技术的无人船测量系统日渐成熟,目前已广泛应用于水质监测、水下地形测量等方面,但在水文测量的应用较少[11-13]。
工程流量测验区别于水文站流量监测,水文站流量监测断面是通过勘查分析确定的,一般情况下断面与水流变化稳定,而工程流量测验都是临时布置的测验断面,断面水流、泥沙特性复杂。船闸工程流量测验,不仅需要考虑流量测验断面特性,还需考虑其他配套水利工程运行情况、船舶通航等因素,对流量测验时机、精度以及安全要求更高。为解决上述难题,尝试将无人船系统应用于船闸工程流量测验。本文主要介绍华微4号无人船系统的组成、测流原理以及技术优势,并以淮安四线船闸工程流量测验为例,详细说明无人船系统测流的方法并分析测验数据,验证无人船系统测流的可行性。
1无人船系统
1.1系统组成
无人船系统依靠无人船平台,集成导航模块、测深系统、GNSS定位定向系统、岸基操控等模块为一体,搭载ADCP,可实现快速、高效获取断面流量数据。系统分为船体、通讯单元、控制单元、数据采集单元等,各部分简介如下。图1为华微4号无人船。
(1) 船体。作为搭载测量和通信设备的基本平台,华微4号是由高分子聚酯碳纤维、凯夫拉布材质构建的三体船,具有耐腐蚀、质量小的特点。
(2) 通讯单元。无人船依靠通信系统的实时射频点对点通信方式实现和岸基控制单元的相互通信,将无人船的工作状态、姿态、测量数据等传输到岸基系统。华微4号可采用电台、4G通信以及网桥的方式进行通信。
(3) 控制单元。借助便携式计算机、遥控器以及通信单元实现无人船的航行控制。根据现场水域环境,测量人员可自主选择自动和手动两种控制方式,且可在两种控制方式中自由切换。同时,通过AutoPlanner无人船控制软件可实现任务规划、数据采集、自主导航、船体参数控制等功能。
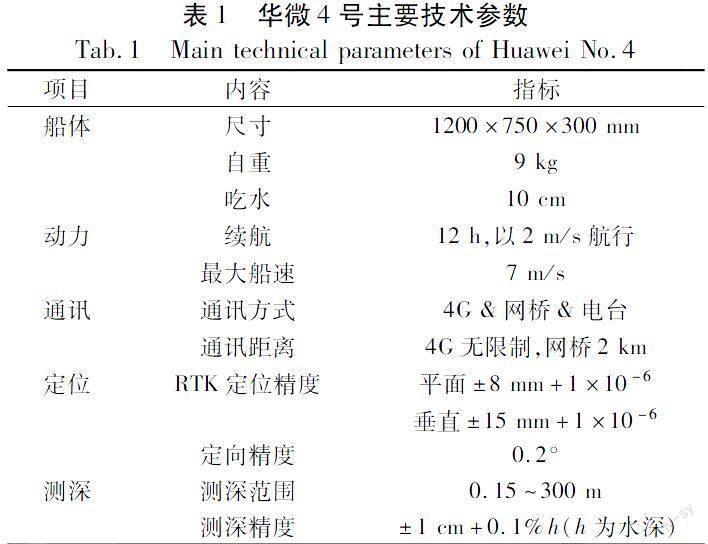
(4) 数据采集单元。华微4号的水深、三维坐标和罗经、流量数据分别通过内置在船体的测深仪、GNSS和ADCP采集,数据通过通信天线实时传输给岸基控制系统。华微4号主要技术参数如表1所示。
1.2测流原理
基于无人船系统的流量测验实质是走航式ADCP流量测验,其基本原理为声学多普勒效应。ADCP测量流速剖面,其换能器发射某一固定频率的声波,然后聆听被水体中颗粒物散射回来的声波[14]。声学多普勒频移则由下式确定:
Fd=2FsVC(1)
式中,Fd为声学多普勒频移,Hz;Fs为发射波频率,Hz;V为颗粒物沿声束方向的移动速度,m/s;C为声波在水中的传播速度,m/s。
根据公式(1)便可计算出水流速度。计算公式如下:
V′=1000FdC′2FscosA(2)
式中,V′为水流速度,m/s;C′为ADCP换能器表面处的声速,m/s;A为波束方向與流速方向的夹角,(°)。
通过无人船搭载ADCP进行的流量测验是基于“流速面积法”实现的,流量计算公式如下:
Q=S(u·n)ds(3)
式中,Q为流量;S为河流某断面面积;u为河流断面某点处流速矢量;n为作业船航迹上的单位法线矢量;ds为河流断面上微元面积。
1.3技术优势
华微4号无人船系统,结合了北斗高精度全球定位系统与无人船自动控制技术,采用水文走航式ADCP断面水流测验设计,具备自动航行、自适应水流直线与悬停功能。相比基于人工船的走航式ADCP流量测验方法,具有如下优势:
(1) 能够确保船体姿态平稳、船速稳定均匀、航线基本直线,可快速、准确测得位置、水深、流速流量等数据;
(2) 船体小巧轻便,可以车载运输,显著降低作业成本;
(3) 船体小、吃水浅,适用于浅水区域作业,能够有效增加实测流量面积,提高测验精度;
(4) 免安装校准,避免仪器校准误差,提高了作业效率和测验精度;
(5) 免人员涉水,改善了作业方式,降低了安全风险。
2实测与分析
2.1工程概况
京杭运河北起北京,南至杭州,流经北京、天津、河北、山东、江苏、浙江6省市,沟通了海河、黄河、淮河、长江、钱塘江五大水系,全长1 797 km,是国家水运主通道。淮安船闸属于京杭运河苏北运河段的重要组成部分,由于现状三线船闸常年满负荷运行,待闸时间较长,水路运输效率降低,开展淮安四线船闸工程刻不容缓。规划建设的淮安四线船闸工程位于淮安市淮安区,包括船闸工程(新建四线船闸、上下游引航道)、桥梁工程(改建桥梁1座,新建桥梁1座)以及附属和配套工程(航标工程、信息化工程、船闸辅助生产设施等)。
本次流量测验区域位于淮安抽水三站、淮安引江闸、沙庄引江闸河道内,共布置5条测流断面,分别为运河大断面CS1,沙庄引河口门CS2,船闸下游CS3,抽水三站引河CS4,淮安引江闸斜引河CS5,具体位置见图2。
2.2外业数据采集
本次采用华微4号无人船搭载RDI瑞普1200K ADCP开展水文流量测验。无人船系统开展流量测验主要有以下4个步骤。
(1) 安装与调试无人船系统。主要有ADCP、电池组、4G天线和遥控天线的安装以及遥控器、螺旋桨的调试等。
(2) 通信设置并设置测流参数。本次采用4G连接无人船与ADCP,并配置CORS实现定位定向功能,通过WinRiver测流软件配置ADCP参数,主要参数如下:测深单元深度0.1 m,盲区0.25 m,脉冲间隔0.01 s,每组信号脉冲数4个,底部跟踪信号数4个,测流船速<2 m/s,GNSS采样间隔小于0.1 s,且与ADCP同步。
(3) 规划航线。通过AutoPlanner无人船控制软件规划航线。
(4) 流量测验。① 操控无人船到测流断面位置后停止控制,让无人船顺流漂动3 s,获取水流方向与流速;② 操控无人船驶至岸边并开启悬停模式;③ 解除悬停,让无人船自动沿垂直河流的方向驶至对岸,待达到预设位置后,无人船自动悬停,停止ADCP测验。
通过完成上述4个步骤,无人船即可實现自动测流,航行一个往返,完成一个断面的流量测验。
图3为航线规划示意图,图4为WinRiver测流软件界面。
2.3内业数据处理
内业数据处理采用WinRiver软件,具体处理流程如下:
(1) 数据检查,主要对ADCP施测数据进行回放检查,确保数据完整、正确以及参数设置合理。
(2) 判断是否存在“动底”,河流一般在含沙量或流速较大时,会导致ADCP一定频率的测定“底”是沿河床运动的,此种情况称为“动底”。无人船系统因集成了GNSS罗经,通过“底”跟踪与GGA航迹图及罗经校准表可判断是否存在“动底”,本次测验经分析无“动底”,流量成果采用底跟踪数据。
(3) 非实测区域推求,根据ADCP测流原理,ADCP施测的是中间部分流量,上层盲区部分、底层旁瓣部分和两岸边非实测区的流量需要采用相关方法推求获得。上、下盲区的流量根据断面实际流速分布率定推求。根据测船起点及终点位置,利用测流断面成果计算水边距离,再根据岸边类型选择合适系数推求岸边流量。
(4) 流量计算,完成上述步骤后通过WinRiver回放软件摘录单次断面总流量,并计算断面流量。
本次流量测验计算结果见表2。
2.4精度评价
由于本次测验断面控制条件各不相同,流量测验精度差异较大,结合无人船系统和船闸工程特性,分类各断面测验精度情况,具体精度统计见表3。
(1) 大流量断面CS1,该断面较宽,水深较深,实测总流量为274 m3/s,实测流量占比约83.2%,是影响测验精度的主要原因。虽然因测验时机要求以及受船舶通航影响,船速较快,船速与水流速度比值达到1.68~2.38,但对测验精度影响甚微,半测回误差为0,测验精度较高。
(2) 大流速、窄深型断面CS2,该断面较窄,水深较深,水流流速大,断面平均流速达到0.84 m/s,是理想的测流断面。实测流量占比约74.4%,船速与水流速度比值小。虽然右岸附近受涡流影响,船迹呈弯曲形状,但对测验精度影响较小,半测回误差分别为-0.6%,0.6%,测验精度较高。
(3) 小流速、窄深型断面CS3,该断面较窄,水深较深,水流流速虽小但流态稳定,实测流量占比约为76.6%,船速与水流速度接近,最大半测回误差为0.9%,测验精度较高。
(4) 受紊流影响的小流量断面CS4,该断面相对较宽,水深较浅,实测流量占比约为68.3%,底部盲区占比较大是实测数据偏少的主要原因。受抽水三站运行影响,断面左岸附近紊流严重,靠近左岸区域又是急流区,水流流速、流向变化剧烈,采用无人船系统自动测验时船体姿态易失控,所以在左岸附近只能采用遥控器手动测验,等流态稳定后立即切换为自动测验模式。手动测验相比自动测验,船体姿态不稳,船艏摆动幅度较大。该断面施测一个测回时精度不满足要求,因此共施测2个测回。半测回误差介于-2.3%~3.8%,测验精度满足T/CHES 61-2021《声学多普勒流量测验规范》要求,但测验精度一般。
(5) 受水草影响的小流量断面CS5,该断面特性基本与CS4一致,实测数据偏少。受水上拦污装置影响,大片水草淤积在断面左岸附近。为防止水草缠绕螺旋桨引起无人船系统失控,现场测验时采用遥控器手动测验,等避开水草区域后则立即切换为自动测验模式。因实测数据偏少及采用手动测验模式,最大半测回误差为1.6%,测验精度一般。
2.5合理性检查
为满足分析需要,在流量测验期间关闭淮安三线船闸,保证淮安抽水三站、淮安引江闸、沙庄引江闸正常运行。根据水量平衡原理,理论上CS1流量为CS2流量与CS3流量之和,CS3流量为CS4流量与CS5流量之和。实际计算结果如表2所示,CS1断面流量的闭塞差为1.1%,CS3断面流量的闭塞差为1.0%,流量数据合理。综上所述,基于无人船系统的走航式ADCP流量测验精度可靠,能够满足船闸工程水文流量测验要求。
3结论与建议
(1) 无人船系统基于北斗高精度全球定位系统与无人船自动控制技术,实现了自动航行和自适应水流直线功能,增加了实测流量数据数量,确保了匀速直线走航测验,提高了流量测验精度,降低了安全风险,提高了作业效率,能够满足船闸工程流量测验的需求,在工程流量测验领域有较强的推广应用前景。
(2) 淮安四线船闸工程流量测验验证了基于无人船系统的流量测验精度可靠,但在断面控制条件较差的情况,比如岸边存在水草、水流紊乱等复杂水域条件下,测验精度会降低。建议进一步完善无人船自动控制技术,优化无人船路径规划算法,以实现复杂流态条件下的自动测量功能;建议进一步优化无人船感知系统,实现自动识别通航船舶、水工浮标、成片水草等障碍物并及时调整航线;建议融合ADCP与无人船控制技术,自动识别水流方向,实现逆水上线功能,避免顺流上线时船体转弯角度过大、速度过快引起误差。
参考文献:
[1]谢悦波.水信息技术[M].北京:中国水利水电出版社,2009.
[2]程海云.2020年長江洪水监测预报预警[J].人民长江,2020,51(12):71-75.
[3]香天元,梅军亚.效率优先:近期水文监测技术发展方向探讨[J].人民长江,2018,49(5):26-30.
[4]熊明.长江水文测报创新实践70年[J].水利水电快报,2020,41(1):7-12.
[5]蒋建平,叶飞,仲跻文.ADCP流量测验过程控制及资料检查方法[M].南京:河海大学出版社,2022.
[6]长江水利委员会水文局.声学多普勒流量测验关键技术开发研究[R].武汉:长江水利委员会,2006.
[7]潘利业,李淼,马毅鹏.新型智能无人船在提升水资源监测、河湖监管水平方面的应用[J].水利发展研究,2022,22(7):19-23.
[8]张树凯,刘正江,张显库,等.无人船艇的发展及展望[J].世界海运,2015,38(9):29-36.
[9]蒲进菁,刘涵,江云华,等.无人船现状及发展趋势综述[J].海洋信息,2020,35(1):6-11.
[10]普东东,欧阳永忠,马晓宇.无人船监测与测量技术进展[J].海洋测绘,2021,41(1):8-12,16.
[11]张锡越,朱照荣,齐永良,等.结合无人测量船的什刹海西海水下地形测绘[J].测绘通报,2018(增1):121-123,175.
[12]王柏林,唐梦奇,李佳,等.基于无人船的水质监测及控制系统设计[J].海洋技术学报,2019,38(4):32-38.
[13]钱辉,舒国栋,王露.无人船测深系统在潮间带地形测量中的应用[J].水利水电快报,2019,40(10):19-20,41.
[14]周绍阳,谢雅蕾,蒋建平.基于代表性垂线流速的在线流量测验方法研究[J].水利水电快报,2023,44(4):28-33.
(编辑:李晗)
Application of unmanned vessel in flow test of Huai′an Fourth Line Ship Lock Project
ZHOU Shaoyang,CHEN Jianjian,JIANG Jianping
(Lower Changjiang River Bureau of Hydrological and Water Resources Survey,Bureau of Hydrology of Changjiang Water Resources Commission,Nanjing 210011,China)
Abstract: With the advantages of high sensitivity,fast operation and convenience,the unmanned vessel has been widely used in water quality monitoring and underwater topographic survey,but less in hydrological flow measurement.This paper mainly introduced the composition,current measurement principle and technical advantages of unmanned ship system.Combined with the hydrologic flow measurement of the Huai′an Fourth Line Ship Lock Project,it introduced the method of flow measurement of the unmanned ship system in detail,and analyzed factors that affected accuracy of the flow test.The results showed that the unmanned ship system based on Beidou high-precision global positioning system and unmanned ship automatic control technology can improve the flow measurement efficiency,reduce the risk of personnel wading,and make the accuracy more reliable under complex flow conditions.
Key words: flow test; unmanned vessel; ADCP; Huai′an Fourth Line Ship Lock