机器人摄像机在全媒体演播室中的应用
2023-09-19黄芳
黄 芳
(福建省广播影视集团,福建 福州 350001)
0 引 言
机器人摄像机是一种新型的拍摄设备,可以通过计算机程序控制摄像机的运动并读取其运动数据,从而实现更加灵活和准确的拍摄。机器人摄像机可以采用不同的结构和设计,以适应不同的场景和需求。在虚拟演播室中,机器人摄像机可以实现切换镜头、定点拍摄、跟踪移动物体等功能,从而使得虚拟场景更加生动和多样化。同时,机器人摄像机还可以与其他技术如增强现实技术相结合,从而实现更加逼真和沉浸的虚拟演播室体验。
随着新媒体的迅速发展,传统媒体节目逐渐向全媒体节目转变,演播室作为节目制作必不可少的一环,也将从传统单一的电视演播室向全媒体演播室转变。因此,福建省广播影视集团着手建设全媒体演播室。全媒体演播室建成后,将主要用于融媒体中心《福建新闻联播》《福建卫视新闻》《新闻启示录》栏目,兼顾《早安福建》《午间新时空》《东南晚报》栏目,以及新闻频道和网络电视台个别栏目总计约9个栏目的使用。演播室每日平均使用时长在9 h以上。因节目众多,且各档节目机位要求不同,为了提高效率,保证节目质量,演播室在设计之初就决定使用机器人摄像机,以便在使用过程中可以快速调用机位,调用摄像机运行轨迹。同时,因为演播室空间原因,无法使用摇臂摄像机拍摄全景,故最终确认选用轨道机器人及固定机器人摄像机。
1 设计要求
全媒体演播室作为融合媒体的核心,演播形式多样化,需要呈现各种的播报形式,如现场连线、嘉宾访谈、互动点评、虚实结合等。播报形式多样,对摄像机提出了更高要求。综合考虑各方需求之后,技术团队最终确定,机器人摄像机系统需具备以下功能。
(1)机器人摄像机需要远程控制功能,在使用时实现演播室无摄像员站机。
(2)虚拟演播室效果,要求机器人摄像机能和虚拟渲染引擎相结合,实现虚拟演播室功能。
(3)演播室系统需配备集中控制系统,机器人摄像机要能受控于集中控制系统。
(4)与LED大屏的渲染引擎配合,实现演播厅内扩展现实功能。
2 技术实现
2.1 机器人摄像机远程控制功能
机器人摄像机的远程控制功能,即通过计算机对机器人摄像机进行远距离控制。将控制机器人摄像机的计算机(以下简称控制计算机)与受控机器人摄像机接入同一网络,用网络连通控制计算机与机器人摄像机,即可实现远距离控制功能。
机器人摄像系统由摄像机承载系统、控制系统及轨道构成。摄像机承载系统包括轨道车、升降柱及遥控云台[1]。遥控云台是摄像机承载系统的核心,不仅要控制摄像机的升降、旋转、俯仰、摄像机镜头的变焦及聚焦,还要通过镜头及平台上的编码器获取摄像机的运动参数。
机器人摄像机的系统架构如图1所示。所有设备通过以太网连接在交换机上。控制计算机通过网络传输控制信息。摄像机运动控制器CMC解码这些控制信息,实现对摄像机镜头推拉摇移,机位升降移动等具体动作的执行,同时,CMC也反馈回摄像机及云台的各种参数数据。

图1 机器人摄像机系统架构
控制系统中,首先需要在配置程序中对摄像机镜头、机器行走限位等参数进行设置,以使机器人更适合实际场地的操作使用。控制计算机与遥控面板均可实现对三台摄像机的远程控制,双重备份模式提高了系统的安全性。在控制系统操作软件中,可以存储历史镜头、运动轨迹等,每次使用可以直接调用,解决了人为拍摄难以高精度实现重复运动轨迹的问题,可以提高节目拍摄效率,释放人力资源[2]。此外,相较于传统的拍摄,轨道机器人能够实现多种不同的拍摄手法,给观众带来良好的观看效果。轨道机器人还能进行俯仰拍摄,能够扩大拍摄角度[3]。
2.2 机器人摄像机与虚拟演播室系统结合
虚拟演播室中,与机器人摄像机相关的技术包括摄像机跟踪技术与定位技术。本项目中使用的是机电传感跟踪定位方式。机电跟踪是目前应用最为广泛的一种技术。这种跟踪技术的优点是不需要其他的设备处理跟踪数据,可以实现无延时、稳定跟踪,不受外界信号光源的影响[4],机器人摄像机可以放置在演播厅的任意位置。设备使用上,配备了三台虚拟渲染主机,每台主机均配备一张广播级专业视频卡和一张Nividia P6000三维渲染卡,可以同时实现虚拟4路信号的开窗。
机器人摄像机的遥控云台不仅控制摄像机的运动,也收集编码器的数据,将编码器的实时数据通过RS-422数据线,以Free-D协议方式传送给虚拟渲染服务器。虚拟渲染服务器随着摄像机位置发生变化,提供实时渲染图像,从而将摄像机拍摄画面与虚拟服务器产生的三维背景结合起来,实现拍摄画面与三维背景的同步变化,呈现更真实的效果。机器人摄像机与虚拟系统物理链路如图2所示。

图2 机器人摄像机与虚拟系统物理链路图
2.3 机器人摄像机与集中控制系统
集中控制系统需要控制机器人摄像机,但因为厂家并未放开控制协议,所以无法直接控制机器人的运动。对此,可采用传输控制协议/互联网络协议(Transmission Control Protocol/Internet Protocol,TCP/IP)方式连接机器人控制主机,用间接的方式控制机器人控制软件,从而达到控制机器人的目的。
技术实现时,需要放开机器人控制软件的权限,使控制软件处于被控状态,再通过机器人控制软件开放协议中的三个有效参数(CAMM NUMBER,SHOT NUMBER,SHOW NUMBER),实现对机器人的摄像机号、镜头号、场景号的控制,进而实现对机器人的控制。机器人集中控制物理链路如图3所示。
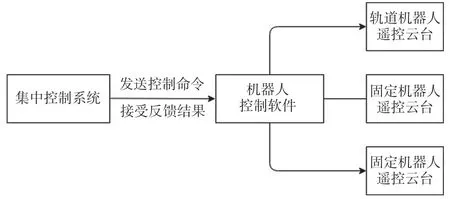
图3 机器人集中控制物理链路示意图
2.4 与LED大屏相结合实现XR功能
扩展现实(Extended Reality,XR)是指通过计算机将真实与虚拟相结合,打造一个可实现人机交互的虚拟环境[5]。本项目利用发光二极管(Light-Emitting Diode,LED)显示屏和摄像机虚拟跟踪技术,将虚拟内容显示在LED显示屏上。同时,虚拟内容随着摄像机视角和位置的改变做出相应的变换,给观众以逼真的透视效果,实现现实世界的扩展。
系统构成为一台轨道机器人摄像机,一台大屏包装渲染服务器,一台虚拟渲染服务器。两台服务器均搭载了NIVIDIA P6000三维渲染卡。将轨道机器人摄像机云台发送的编码器实时参数分为两路,一路送给大屏渲染服务器,一路送给虚拟渲染服务器。这样,大屏背景与虚拟服务器渲染出的虚拟前景画面均会随着摄像机位置移动发生变化,打造出一个真实中有虚拟变化、现实与虚拟无缝对接的XR场景。机器人摄像机实现扩展现实的物理链路如图4所示。

图4 扩展现实物理链路图
3 系统难点问题解决
3.1 轨道机器人轨道水平的调整
本项目中,轨道全长23 m。轨道搭建好之后,需要对轨道进行调平。因为轨道为弯轨,机器人摄像机在快速运动时会产生较大的离心力。这时候,轨道稍有不平,就会导致摄像机出现抖动现象。只有调整好水平,才能使机器人摄像机在轨道行走时的晃动尽量小。
调整水平时,借助激光水平仪在轨道平面打基准线,用于检查和调整水平。通过反复调整轨道螺丝来调整高度,使轨道达到水平。
3.2 机器人摄像机虚拟跟踪的实现
之前的虚拟系统中,摄像机均为固定位置摄像机,涉及的跟踪参数仅有云台俯仰和平摇,以及摄像机镜头的变焦及聚焦信息。而轨道机器人摄像机新增了对摄像机在轨道上位置的实时跟踪。轨道机器人的轨道编码轮位于轨道末端,跟随皮带转动,采集到的实时位置为轨道车底盘位置,并非摄像机实际位置。为了与虚拟系统相结合,需要根据几何原理,将轨道车位置通过相应的计算公式转换为虚拟系统所需的摄像机三维空间位置信息。
与虚拟系统进行跟踪定位,采用的是两点定位方式。定位时,需选取空间中的两个点为虚拟系统的定位点,两个点中其中一个为虚拟演播室的三维坐标原点,另一个则为任意选取点。
定位时,通过一组轨道车在轨道上不同位置拍摄定位原点时编码器回传的位置及角度数据,利用计算公式,系统会近似计算出轨道的形状。采样点越多,精确度越好。然后,把所得数据传给虚拟引擎做基准,虚拟系统渲染的场景就可以与真实空间匹配。
轨道长度较长,且是弧形轨道,因此越靠近两端,虚拟跟踪校准就越难。为了保证精度,需要在两端位置选取更多的采样点,以保证两端计算结果的精确度。
4 设备使用中遇到的问题及解决方法
机器人摄像机系统在福建省广播影视集团使用一段时间后,系统本身比较稳定,但是也遇到一些问题,可以分为硬件问题和软件问题。
4.1 硬件问题
4.1.1 机器人摄像机急停
机器人摄像机使用初期,操作人员不熟悉操作,机器人误碰了演播区其他设备,此时机器人摄像机保护系统会启动,机器人运动急停。对此,解决方法是按下机器人安全保护系统上绿色按钮,解除机器人紧急停止状态。
4.1.2 控制盒死机
触控屏控制软件突然不能控制轨道机器人摄像机,此时软件运行正常,能够正常控制其他两台固定机器人摄像机。这种情况是轨道机器人控制盒WALL BOX死机,解决方法为重启控制盒。
4.2 软件问题
软件问题大多是机器人摄像机信号与虚拟信号出现错位,场景无法随着摄像机拍摄到的信号做出相应的变化。对于此问题,排除摄像机跟踪故障后,解决方式是在虚拟软件中对机器人摄像机进行重新定位设置,恢复其与场景的匹配。
5 应用效果
机器人摄像机投入使用后,大大增强了镜头的灵活性和多样性,与虚拟场景相结合,增强了节目的艺术效果。同时,系统运行稳定,经受住了每天长达9 h的运行考验。每天有9档栏目使用机器人摄像机进行直播或节目录制,取得了良好的社会效益和经济效益。
6 结 语
随着人工智能技术的不断发展和应用,机器人摄像机在虚拟演播室中的应用将越来越智能化和自主化。随着应用场景的不断拓展和多样化,机器人摄像机在虚拟演播室中的应用也将越来越多样化和定制化。应用的广泛和场景的多样,将给机器人摄像机在虚拟演播室中的应用带来安全性和可靠性方面的挑战。随着技术的不断发展和创新,相信机器人摄像机在虚拟演播室中的应用会越来越成熟和完善,为人类创造更加美好的未来。