基于感性工学与层次分析法的下肢康复机器人造型设计
2023-09-19孙凤傲段金娟
孙凤傲 段金娟
(1.天津工业大学机械工程学院,天津 300387;2.北京社会管理职业学院婚礼文化与传媒艺术学院,北京 102600)
随着人口老龄化时代的到来,脑卒中、帕金森、心脑血管硬化等疾病导致的老年人下肢运动功能障碍频发,老年人对运动功能康复的需求也越来越大,下肢康复机器人作为下肢康复辅具受到了关注[1]。目前下肢康复机器人的研究主要在控制设计、结构设计、人机交互方面,如李勇等[2]结合临床步态数据与人体步态,对下肢康复机器人的运动轨迹进行规划,搭建了控制系统平台。陈哲铭等[3]提出一种6自由度的下肢康复机器人,针对下肢关节损伤的个体差异,提出了一种关节轨迹方法。赵航[4]为提高下肢运动功能障碍患者的积极性,利用虚拟现实技术构建虚拟城市漫游场景,加强了患者在康复时的沉浸感。目前对于下肢康复机器人的研究主要集中在功能与交互设计上,对造型设计方面的研究较少,忽视了患者的心理需求,对患者的感性需求的研究不充分,降低了患者康复的积极性。文章提出一种基于感性工学与层次分析法的下肢康复机器人造型设计,通过量化的方法获取用户对于下肢康复机器人的感性需求,利用层次分析法对下肢康复机器人的感性意象重要性进行评估,建立下肢康复机器人感性意象映射模型,获取最优类目组合指导下肢康复机器人的造型设计,为康复类产品的造型设计寻求更新更多的可行性。
1 感性工学与层次分析法
感性工学一词最早由山本健一在1956 年提出[5]。之后日本学者长町三生发表了一系列有关感性工学的论文和著作,奠定了感性工学理论基础[6-8]。感性工学主要通过定性和定量的方法把人们模糊不清、难以确定和捕捉的感性意象转换为定量的数据,并对量化之后的数据进行分析以此来指导设计实践。
层次分析法是一种以定性和定量研究相结合的决策分析法[9]。近些年,层次分析法被广泛应用产品的造型设计,机械结构设计等研究领域。如段金娟[10]等人通过对纺织机械进行分析,运用层次分析法获取部件对整体形态的贡献度,指导设计实践,并建立层次评价模型对方案评估,获得最佳方案。
2 基于感性工学的下肢康复机器人感性意象获取
2.1 产品代表性感性词汇收集与筛选
首先,为获取用户对下肢康复机器人的情感偏好,通过相关文献、论坛网站、产品宣传手册等途径广泛搜集有关下肢康复机器人的感性词汇,初步搜集到80 个感性意象词。其次,邀请5 名具有五年以上工业设计经验的设计师组成专家小组1,针对下肢康复机器人的造型特点,对80 个感性意象词汇进行筛选。去除词汇意思相似以及无法准确描绘产品特征的词汇,共得到30 个感性意象词汇,并对感性意象词汇进行反义词配对,用于语义差异量表的构建。再次,邀请下肢运动功能障碍患者10 名,从事肢体康复的医师5 名和工业设计师5 名,共20 名被测人员。采用线上调查问卷的方式,从表中30 组感性意象词汇对中筛选出6 组能体现下肢康复机器人造型特征的感性意象词汇对。最后,根据问卷数据结果,安全的—危险的、易用的—难用的、科技的—传统的、舒适的—不适的、轻巧的—笨拙的、柔和的—坚硬的6 组词被选频率较高,最终选择这6 组感性意象词汇对作为代表性样本的感性意象词汇对。
2.2 产品代表性样本收集与筛选
通过查阅下肢康复机器人相关的文献资料,浏览产品官网、宣传画册、市场调研等途径,搜集下肢康复机器人的样本图片。邀请5 位具有五年以上工业设计经验人员组成专家小组2,结合KJ 法[11]对下肢康复机器人的样本图片进行筛选,剔除形态差异较小,画面不清晰、画面角度无法体现产品特征的样本,最终得到了27 张代表性样本图片。为了避免颜色、品牌、材料对感性造型研究的影响,对代表性样本图片进行去背景、去色、去LOGO 等图像处理,如图1 所示。

图1 下肢康复机器人代表性样本
3 基于层次分析法的下肢康复机器人感性意象评估
为有效获取用户对下肢康复机器人的感性意象评价,运用语义差分法,将6 组代表性感性意象感性词汇对与27 个代表性样本相结合,采用1—7 分值李克特量表制作下肢康复机器人造型感性意象评估调查问卷,如图2 所示。采用线上问卷的调查方式,共邀请被测者30 名进行线上评估。其中,具有设计经验的设计师10 名,从事肢体康复工作的康复医师10 名,下肢运动功能障碍患者10 名,通过自身的印象对代表性样本图片进行打分。发放问卷30 份,回收有效问卷30 份。计算各代表性样本在各感性维度下的平均分值,统计值如表1 所示。
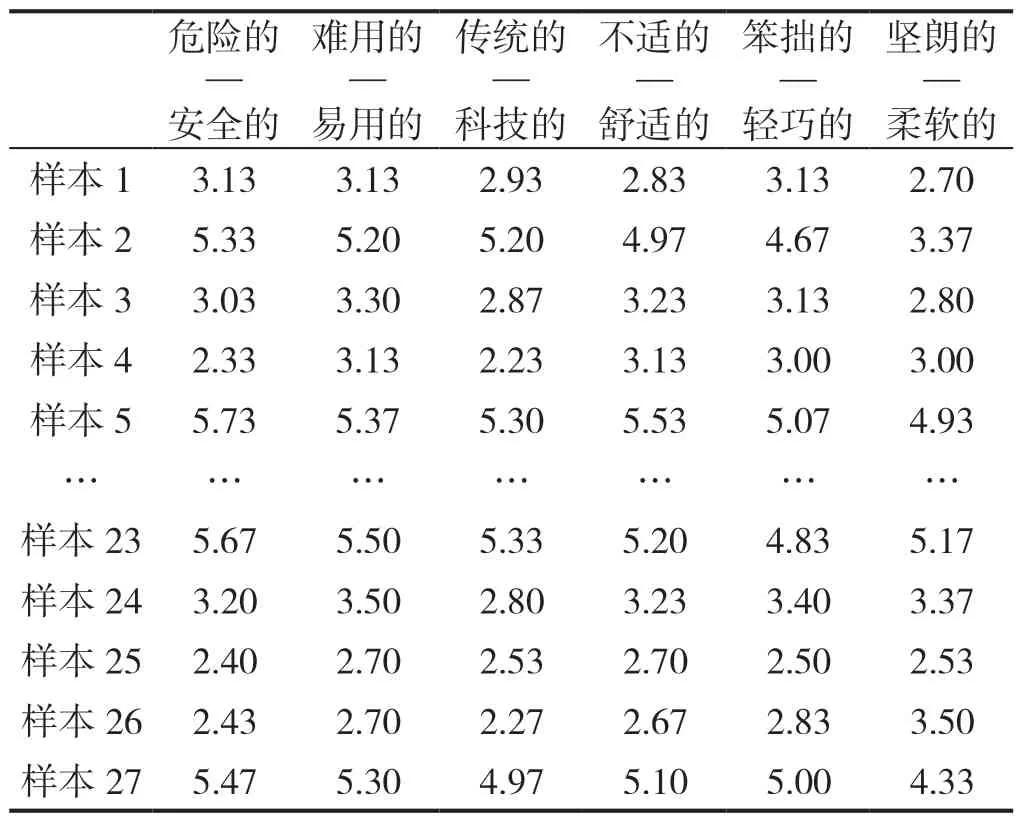
表1 下肢康复机器人代表性样本的感性意象均值
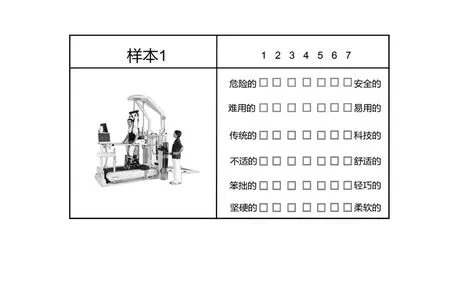
图2 调查问卷示意图
满足用户的多个感性意象需求,需要对多个意象维度进行分析,获取综合感性意象评分。采用层次分析法,构建下肢康复机器人造型意象层次结构模型。对各代表性感性意象词汇进行重要性评估,得到其中设计中的权重。结合下肢康复机器人产品的特性,邀请专家小组对代表性感性意象词汇采用1—9 标度的重要性判断进行评估,将数据进行归一化后得到各代表性感性意象词汇的权重系数,如表2 所示。权重大小排名为,危险的—安全的、不适的—舒适的、难用的—易用的、坚硬的—柔软的、笨拙的—轻巧的、传统的—科技的。

表2 下肢康复机器人造型意象判断矩阵
在得到各项指标的权重值后,需要进行一致性检验。计算可得CI=0.083 5,CR=0.067 3,CR<0.1,符合层次分析法中一致性检验要求,证明该层次结构模型较为合理。
将表中各代表性感性意象词汇的权重系数与表中各代表性产品的感性意象均值相乘,得到加权后的各代表性样本综合感性意象分值,如表3 所示,为搭建后续产品感性意象映射模型提供数据基础。

表3 下肢康复机器人代表性样本综合感性意象分值
4 下肢康复机器造型设计思路
4.1 产品样本形态要素解构分析
为研究下肢康复机器人形态要素与感性意象之间的关系,需要分解对用户感性认知影响较大的特征要素。运用形态分析法对代表性样本图片进行形态要素解构分析,下肢康复机器人可分解为主机、显示屏、步行台、扶手、机体支撑悬吊与下肢外骨骼6 个组成部分。对各代表性样本图片的6 个组成部分进行形态特征的描绘,将影响下肢康复机器人造型意象的主要组成部分设为项目,各组成部分的造型形态特征设为类目,共得到6 个项目、20 个设计类目。用英文字母A—G 表示机体支撑悬吊、扶手、步行台、步行台、显示屏、主机与下肢外骨骼项目,用数字1—5 代表各组成部分的造型形态特征的类目,构建下肢康复机器人造型要素特征集,如表4 所示。
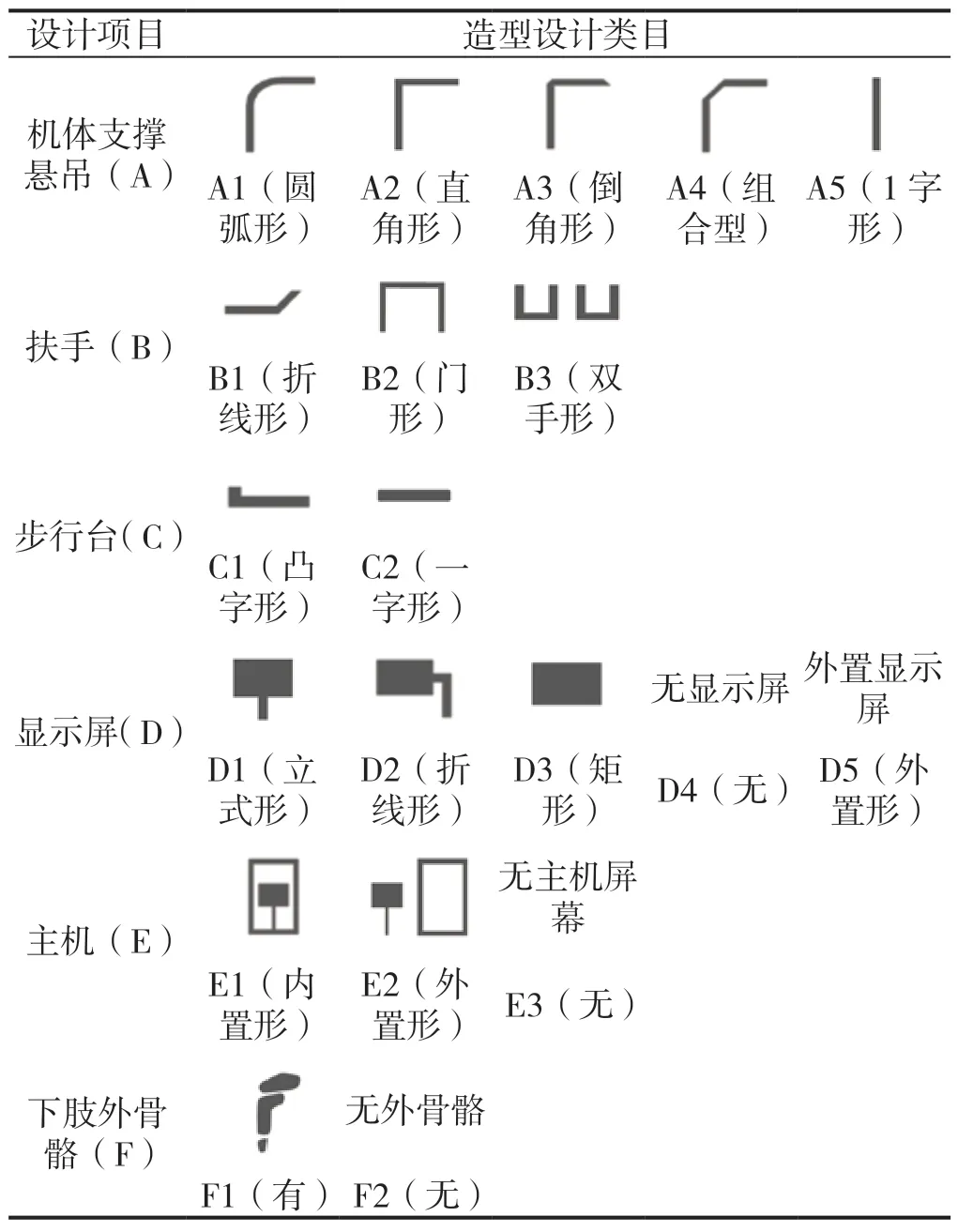
表4 下肢康复机器人造型要素特征集
结合类目划分对27 个代表性样本进行开关式编码,将造型特征转化为计算机语言,将定性的造型要素转化定量数据,便于后续的深度神经网络的计算。
4.2 产品感性意象映射模型搭建
采用含有两层隐藏层的三层深度神经网络构建下肢康复机器人感性意象造型神经网络模型[12]。其输入层有20 个神经元,分别对应下肢康复机器人的造型要素类目;输出层的神经元为加权后各代表样本综合感性意象分值。将样本数据随机分为训练集和测试集,其中20 个样本数据为训练集,7 个样本数据为测试集。为保证模型的可行性,使用均方误差作为训练性能评估损失函数loss。为了防止数据过拟合,采用l2 正则化优化网络架构,学习率为0.001。采用Adam 优化器,通过迭代训练使其均方误差MSE不断降低。经过网络参数的不断迭代优化,训练集和测试集误差曲线趋向平稳,实验结果如图3 所示。在迭代80 轮后,测试集的均方差小于0.09,经过训练后的模型在测试集的最终均方差为0.081,实际误差为0.28,满足设定条件。
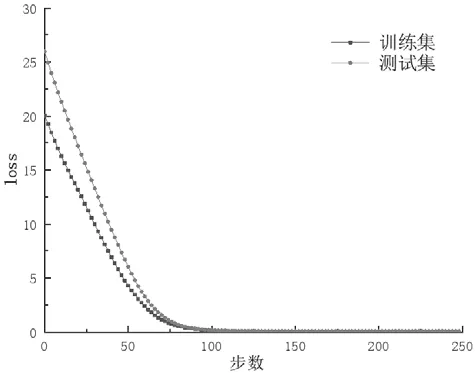
图3 实验训练结果
为了获取对应最高分值的最优类目要素组合,使用穷举法,将下肢康复机器人的造型类目要素按照正交原则进行重新组合,共得到5×3×2×5×3×2=900 种方案,得到下肢康复机器人造型设计要素组合资源库。使用上述深度神经网络模型对900 种组合进行感性意象评价值的智能预测。排名第一的类目组合为{A1,B2,C1,D2,E1,F1},感性意象分值为6.11,被认定为是最佳的类目组合。将推荐类目作为设计实践中项目造型输入,满足用户的感性需求,为方案生成奠定基础。
5 下肢康复机器人造型设计实践
根据最佳类目组合{A1,B2,C1,D2,E1,F1}如表5 所示,进行造型设计实践。
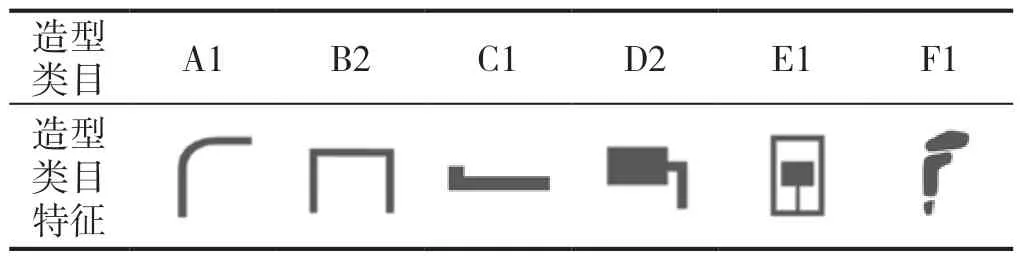
表5 最优造型特征类目组合
该款下肢康复机器人以安全、舒适、易用、柔软、轻巧、科技为感性需求为基础,进行造型设计。该产品造型比例协调,形态较为柔和,功能排布合理,色调采用暖色系,给患者带来一种温暖舒适的感觉。产品以白色为主色,深灰色与淡黄色为辅色。选择医疗类产品常用的白色作为主色,能体现出下肢康复机器人的干净、整洁,也能有效的降低患者的焦躁感。在产品中深灰色主要应用于产品的底部,增加产品的稳重感,让产品看起来更加的协调,更具有安全感。满足用户对下肢康复人的感性需求与功能需求,如图4 所示。
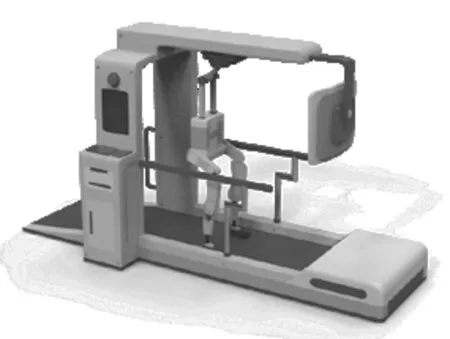
图4 下肢康复机器人造型设计
6 结语
文章提出一种基于感性工学与层次分析法的下肢康复机器人造型设计方法,有效的解决了下肢康复机器人造型无法满足用户感性需求,提高患者康复积极性的问题。首先使用感性工学理论获取用户对下肢康复机器人的感性需求;其次运用层次分析法对下肢康复机器人感性需求进行重要性评估;最后构建下肢康复机器人感性意象模型,获取最佳设计要素类目,指导设计实践。满足了用户对下肢康复机器人的感性需求,验证了基于感性工学与层次分析法的下肢康复机器人造型设计的可行性。
