新型连续阻尼可调悬架系统超视距预瞄控制策略研究
2023-09-17桂永建马英照严天一
桂永建,马英照,严天一
(青岛大学 机电工程学院,山东青岛 266071)
传统被动悬架系统阻尼系数不可实时调节,难以满足复杂行驶工况下的平顺性需求,设计开发连续阻尼可调悬架系统及其控制策略以提升车辆垂向动力学性能已成为近些年的主要研究热点[1]。
国内外学者已提出多种的控制算法以提高悬架系统的性能。Li 等提出了一种基于轴距预瞄的汽车主动悬架多目标控制方法,并通过仿真实验比较了带轴距预瞄与不带预瞄两种控制方式效果的差别[2]。Göhrle 等提出了一种以车身加速度为评价参数的模型预测控制策略,仿真结果表明,该策略可有效提升车辆平顺性和舒适性[3]。Theunissen 等提出了一种基于路面高度信息预瞄的主动悬架预测控制策略,并将优化策略以函数求值的方式离线运行。结果表明,该策略可有效减小车身垂向加速度,并且可以缓解运行单元内存紧张的问题[4]。Li 等设计了一种基于云辅助的半主动悬架的控制策略,通过将路面信息存储到云端数据库,用于车辆行驶状态的估计,并将所有优化问题都在一个具有高计算能力的远程嵌入式代理中解决[5-6]。Basargan 等提出了一种车辆到云到车(V2C2V)的技术,通过云数据库存储路面信息,实现悬架系统自适应预瞄控制[7-9]。李克强等提出了一种“人-车-路-云”一体化协同创新发展的智能网联汽车运控系统的概念,并通过仿真与道路实验,验证了将云端计算、感知、决策和控制融合的可行性与先进性[10]。张洪昌等研究了通过云端服务,将多车辆信息融合校正处理的方法,并进行了实车试验。试验结果指出该方法可以准确的测量车辆前方的路况信息,驾驶员可以提前预知前方路况,可有效提高驾驶安全性,减少事故的发生[11]。
本文利用先进的车载通讯网络,综合考虑悬架阻尼控制中的相关需求,搭建连续阻尼可调悬架系统整车仿真模型,并在云端部署超视距预瞄控制策略,将车辆行驶状况和道路高程信息等上传至云端,云服务器计算最优阻尼力信号下发至车载电子控制单元,控制单元对电磁阀进行直接控制,通过以上进行的硬件在环试验以有效评估新型悬架控制策略的有效性。
1 系统模型构建
构建新型连续阻尼可调悬架系统模型是研究超视距预瞄控制策略的基础。根据需求,将整车的质心作为原点,构建了简化为7个自由度的连续阻尼可调悬架系统的整车动力学模型,由车身的俯仰、垂向和侧倾运动以及车轮的垂向运动组成,如图1所示。
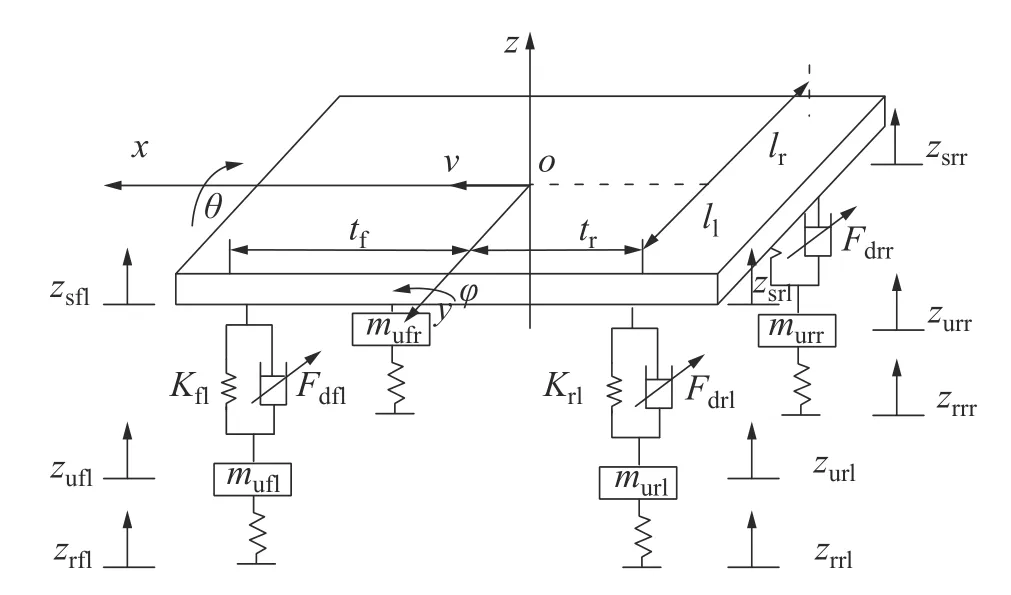
图1 七自由度整车行驶动力学模型Fig.1 Seven degrees of freedom vehicle driving dynamics model
车身俯仰运动为
车身垂向运动为
车身侧倾运动为
车轮垂向运动为:
连续阻尼可调悬架系统产生的垂向作用力为
车身在各车轮处垂向位移为:
式中:ms为整车簧上质量;zs为整车质心处车身垂向位移;zsi为车轮上方车身垂向位移,i=fl,fr,rl,rr,下同:θ为车身侧倾角;φ为车身俯仰角;Ix、Iy分别为车身侧倾、俯仰转动惯量;tf、tr分别为整车质心到前、后轴的距离;ll、lr分别为前、后轴1/2轮距;musi分别为车轮处簧下质量;kti为各车轮垂向刚度;zui分别为各车轮垂向位移;zri分别为车轮处路面输入;Fsi、Fdi分别为车轮上方处螺旋弹簧力与减振器可调阻尼力。
综上,分别选取状态变量x,输出变量y,控制变量u及路面输入w,建立状态空间表达式为:
各变量与系数矩阵的具体形式为:
本文采用四轮非平稳时域路面模型作为路面输入[12],则:
式中:nc为空间截止频率,nc=0.01 m-1;v为车速;n0为标准空间频率,n0=0.1 m-1;G0为路面不平度系数,m3;ω(t)为高斯白噪声,均值为0;d为轮距,m;l为车辆轴距,m。
2 超视距预瞄控制策略设计
超视距预瞄控制策略利用云平台数据库存储的道路属性信息以及云计算的强大算力实现超视距预瞄控制,解决车辆传感器感知距离有限以及车载电子控制单元运行复杂控制策略时算力不足的问题,新型的控制策略如框图2所示。

图2 超视距预瞄控制策略框图Fig.2 Beyond line-of-sight control strategy block diagram
面向新型连续阻尼悬架控制系统的云平台具备车辆设备端实时数据上云、云平台数据下发、云服务器设备端数据存储和控制策略计算等功能。为了减小车辆与云平台之间数据包传输的开销,采用消息队列遥测传输(Message queuing telemetry transport,MQTT)协议,并利用云服务器构建云端计算平台[13]。
在超视距预瞄控制系统中,云服务器需要接收车辆行驶工况数据,并下发控制指令,利用物联网作为数据交换平台,实现车载电子控制单元与远程云服务器的数据通讯。云服务器使用官方提供的Python IoT SDK 连接物联网平台,并通过MQTT 协议远程订阅车辆行驶状态信息,并实时发布道路属性和悬架阻尼信息[14]。在物联网平台定义相关车辆状态物模型、设计相应的数据报文和制定数据规则引擎的流转规则,以完成物模型属性的读取与设置、云平台的数据流转以及云平台数据下发等功能。车载电子控制单元将接收的车辆状态CAN 帧数据进行解析,并通过远程通信模块发送到物联网平台;同时车载电子控制单元向物联网平台订阅道路属性信息以及阻尼控制信号,将道路属性信息传输至控制器悬架阻尼预瞄控制模块,将阻尼控制信号封装成CAN 帧发送到联合仿真模型。
阻尼预瞄控制采用基于路面预瞄的模型预测控制策略,同时考虑路面高程信息,并显式地处理系统状态、输入与输出变量约束,逐步优化得到预测范围内的阻尼减振器的最优阻尼力。根据控制目标分配权重系数,实现连续阻尼可调悬架系统阻尼控制。
本文以簧上质量垂向加速度、侧倾与俯仰角加速度、悬架动行程以及轮胎动位移为优化指标,实现连续阻尼控制[15]。因为模型预测控制算法运算复杂,故本文将其部署在云平台,以保证阻尼预瞄控制策略的准确性和实时性,阻尼控制策略框图如图3所示。

图3 阻尼控制模型策略框图Fig.3 Damping control model strategy block diagram
利用建立的新型连续阻尼可调悬架系统模型设计模型预测控制算法,根据行驶在不同工况下阻尼控制的目标,设置输入与输出的权重,并综合考虑路面高程信息,建立基于路面预瞄的新型连续阻尼预测控制器。通过最优阻尼力与作动条件求得电磁阀式阻尼可调减振器的驱动电流,以实现对最优阻尼力的跟踪控制。
模型预测控制通常在离散的时间域内进行设计,因此,将状态方程(10)离散化得:
定义预测时域为Nc,控制时域为Np,且Nc≤Np。根据当前状态变量x(k)和时变路面输入w(k+i)(i=0,1,…,Np),预测时域状态变量为:
预测时域内的被控输出为:
将预测时域的被控输出写成矩阵形式,即
以车身垂向加速度、侧倾与俯仰角加速度、悬架动行程、车轮动位移以及减振器输出阻尼力为优化参数,即
式中:qz¨、qθ¨、qφ¨分别为车身垂向加速度、侧倾角加速度和俯仰角加速度的加权系数;qsfl、qsfr、qsrl、qsrr分别为各悬架动行程的加权系数qufl、qufr、qurl、qurr分别为各车轮动位移的加权系数;qFfl、qFfr、qFrl、qFrr分别为各减振器输出阻尼力的加权系数。
由于车辆在行驶过程中整个系统存在较强的非线性与不确定性,簧上质量和胎压等参数的变化会影响系统的平顺性。模糊控制自适应能力较强,因此本文采用模糊控制针对簧上质量和胎压的变化去调节各减振器输出阻尼力的权重系数。由于轮胎胎压会影响轮胎刚度,故本文将将模糊控制器的输入量设为车辆的簧上质量e1和轮胎刚度e2,输出量为悬架系统的模糊控制作用力权重系数qM。输入与输出的模糊集均为{NB,NS,ZE,PS,PB}。考虑到乘客、货物和油耗的影响,将e1论域分别为[-150,150]。e2论域为[-53,53],qM论域为[-10-6,10-6]。隶属度函数均采用三角形隶属度函数,采用重心法对模糊变量解模糊运算,输出得到悬架系统的模糊控制阻尼力权重系数[16]。模糊规则表如表1所示。

表1 模糊控制规则表Tab.1 Fuzzy control rule table
将式(21)代入式(28),为得到最小控制变量U,忽略与控制变量U无关的项得:
电磁阀式阻尼可调减振器受到驱动阻尼力以及悬架动行程等输入约束和输出约束。
本文输入阻尼力约束采用恒定线性约束[17],即:
式中:umin与umax分别为电磁阀式阻尼可调减振器输出值的上下限;ymin与ymax分别为输出约束上下限。
将输入约束和输出约束通过矩阵形式来表示,即
式中:
基于构建的目标函数式(30)与约束方程式(32)计算最优阻尼力序列U*,并将U*的首个元素作为最优控制输入施加至电磁阀式阻尼可调减振器逆模型中,即
由于构建的模型预测控制器计算的最优阻尼力是主动控制力,应根据以下驱动条件施加控制,确保阻尼可调减振器只在悬架系统中消耗能量:
3 硬件在环试验研究
为验证新型连续阻尼可调悬架系统超视距预瞄控制策略的可行性,本文综合利用车载电子控制单元、CarSim-Simulink 联合仿真模型、网络通信模块、Kvaser Leaf Light V2 CAN 总线分析仪等构建了云端硬件在环试验平台,并进行云端在环试验。Kvaser Leaf Light V2 CAN 总线分析仪将构建于上位机的CarSim-Simulink 联合仿真模型与车载电子控制单元进行连接。将连续阻尼可调悬架系统阻尼控制所需的车辆状态信息,通过CAN 总线从CarSim-Simulink 联合仿真模型发送至电子控制单元,同时将从云平台接收的阻尼控制信号反馈至联合仿真模型,实现阻尼控制,为符合车辆实际运行状态本文采用了随机路面试验工况。硬件在环试验框图如图4所示。

图4 硬件在环试验框架Fig.4 Hardware-in-the-loop test frame
基于控制目标分配权重系数,以簧上质量垂向加速度、侧倾与俯仰角加速度,各悬架动行程和各轮胎动位移为优化指标,利用Python 与基于Ipopt求解器的CasADi 框架进行MPC 控制求解,实现减振器阻尼控制,同时为避免车辆加减速影响,选取连续阻尼可调悬架系统稳定以后10 s 的试验结果进行数据分析。
试验假定路面为C 级路面,车速v=60 km/h,预测时域Np=10,控制时域Nc=10,控制输出权重矩阵Q=diag(100,1,1,5×105,5×105,5×105,5×105,5×104,5×104,5×104,5×104),控制输入权重矩阵R=diag(10-5,10-5,10-5,10-5),试验结果如图5~图9所示。

图5 垂向加速度响应Fig.5 Vertical acceleration response
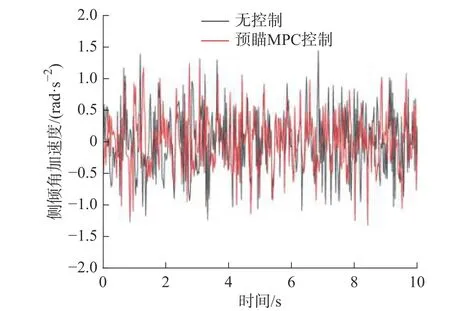
图6 侧倾角加速度响应Fig.6 Roll angle acceleration response
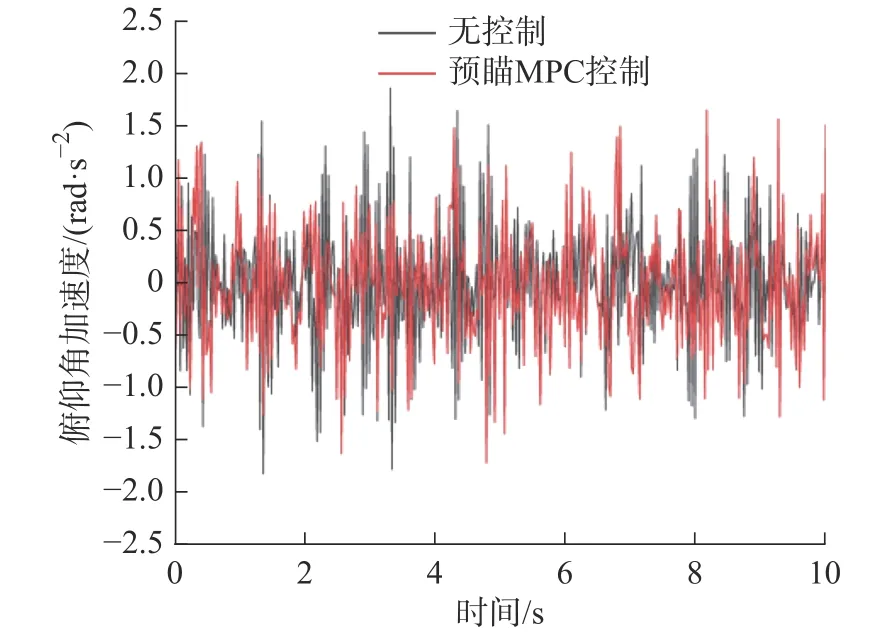
图7 俯仰角加速度响应Fig.7 Pitch angle acceleration response
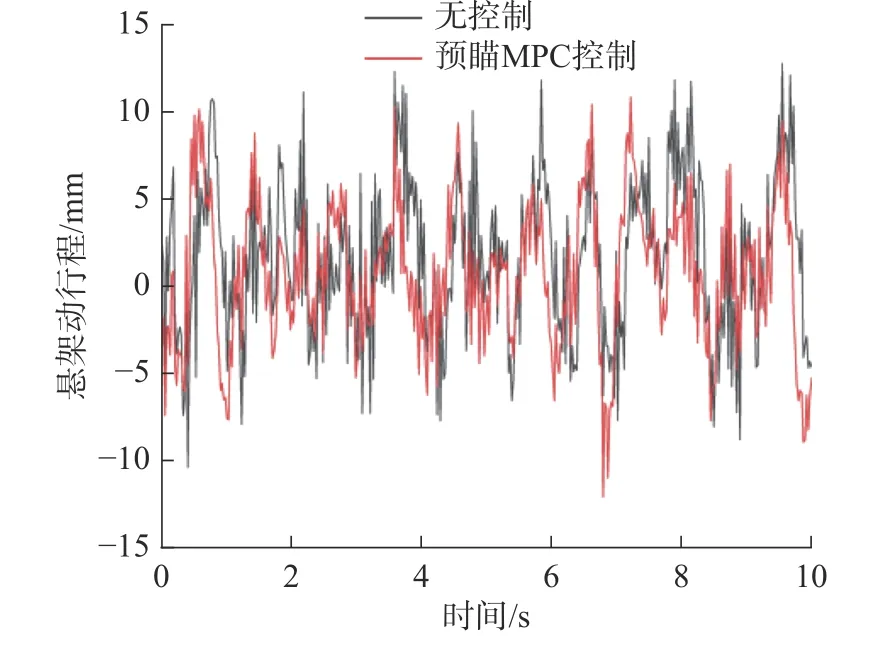
图8 左后车轮悬架动行程响应Fig.8 Left rear wheel suspension dynamic travel response
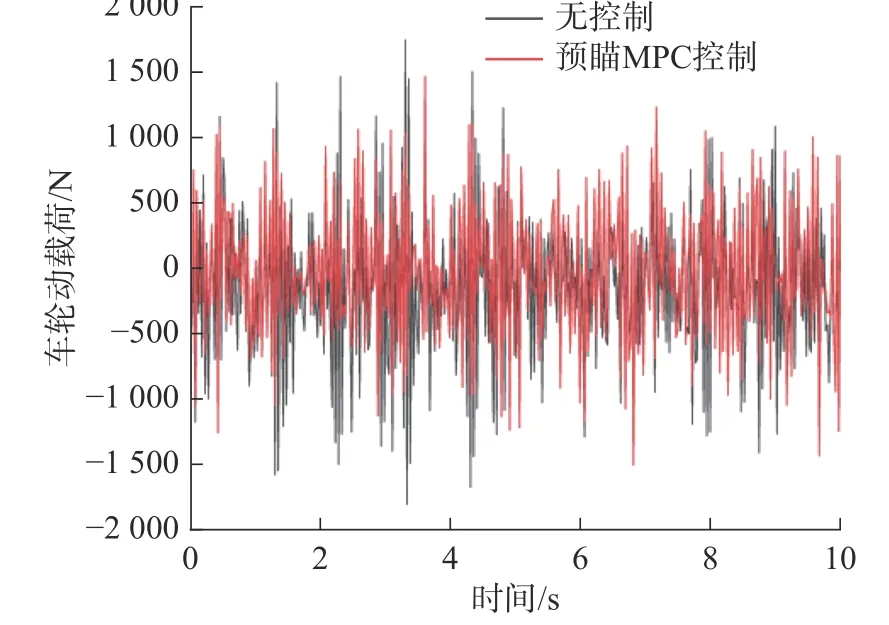
图9 右后车轮动载荷Fig.9 Right rear wheel dynamic load
新型连续阻尼可调悬架系统性能评价指标见表2。
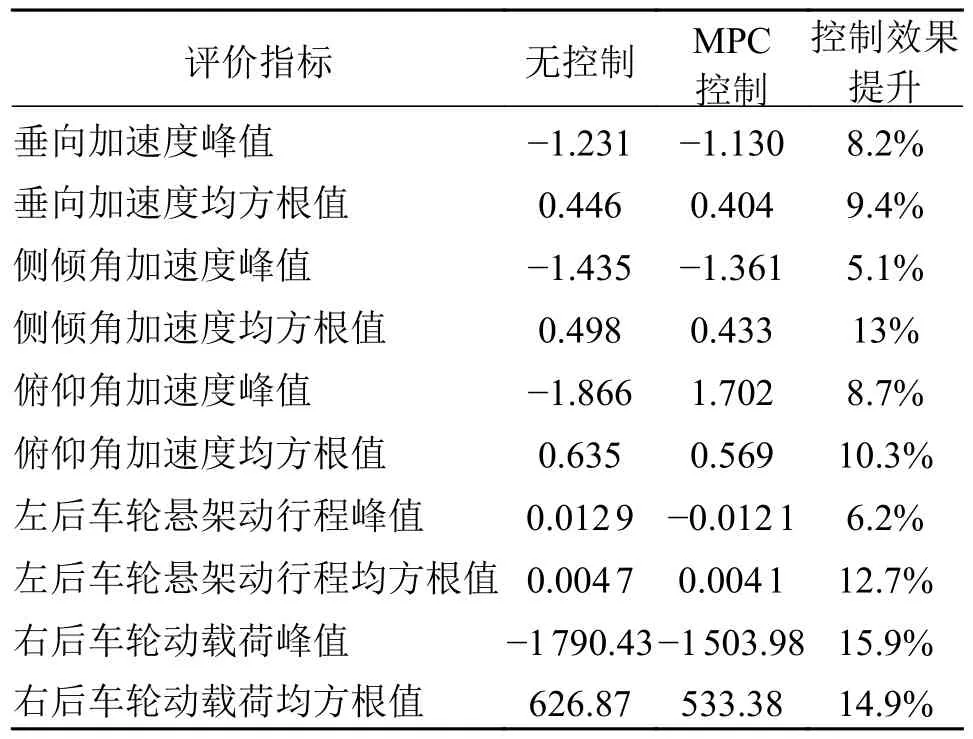
表2 新型连续阻尼可调悬架系统性能评价指标Tab.2 Performance evaluation index of a new continuous damping adjustable suspension system
由图5~图9与表2所示,垂向加速度峰值与均方根值分别降低了8.2%与9.4%,侧倾角加速度峰值与均方根值分别降低了5.1%与13%,俯仰角加速度峰值与均方根值分别降低了8.7%与10.3%,左后车轮悬架动行程峰值与均方根值降低了6.2%与12.7%,右后车轮动载荷峰值与均方根值分别降低了15.9%与14.9%。试验结果表明,本文所设计的控制策略明显降低了车身加速度,满足该控制策略的控制目标,改善了车辆的平顺性。
4 结论
1)构建了电磁阀式阻尼可调减振器模型的电控空气悬架系统模型,并结合CarSim 整车动力学模型,建立了电控阻尼可调悬架系统联合仿真模型;同时搭建了路面模型与具有电控阻尼减振器可调悬架系统的七自由度整车动力学模型,为基于模型预测控制的阻尼预瞄控制模块提供精确的预测模型。
2)以云服务器等构建了超视距预瞄控制策略运行平台,利用物联网云平台数据库存储道路属性信息以及车辆行驶工况,并进行数据流转通讯。设计了基于路面预瞄的连续阻尼可调悬架系统阻尼模型预测控制策略,并将其部署于云平台。硬件在环试验结果表明,部署在云端的预瞄控制策略可实现减振器阻尼的预瞄控制,可有效解决时滞性问题,在改善平顺性的同时降低车载电子控制单元的运行负荷。
