仿蜜蜂腹部变体机构设计及运动分析
2023-09-17尹丹妮谷勇霞张玉玲
尹丹妮,谷勇霞,张玉玲
(1.北京工商大学 人工智能学院,北京 100048;2.清华大学 摩擦学国家重点实验室,北京 100084)
随着飞行任务的多样化、飞行环境的复杂化,对飞行器的适应性要求不断提高[1]。传统的固定式飞行器只能完成针对性的飞行任务,比如巡航、侦察、作战等,不同任务的飞行器外形差异很大,单一的固定外形已经无法满足逐渐多样的任务要求[2]。为了适应复杂多变的飞行环境,早在1890年,法国Clement Ader 提出了变体机翼的设计思想,机翼可以根据需要进行折叠,进而有了“可变形飞行器”的概念,通过改变飞行器的气动结构来获得最佳的飞行性能[3]。
早期从仿生角度提出的变体飞行器,是仿照鸟类的翅膀设计变体机翼,根据飞行任务和外界环境变化调整机翼形状,研究重点也都集中在改变弯度和扭转分布,使机翼面积、机翼面形状、后掠角、展弦比等参数在一定范围内变化,以减少空气阻力,实现机翼效率的最大化[4-5]。最初阶段是通过机械结构来实现机翼变形,该阶段已经实现了良好的发展。最早莱特兄弟观察到鸟类遇风扭转翼尖,于是通过扭转上机翼翼尖来改变机翼的外倾角,进行偏航和滚转控制。此后,研究人员展开了大量针对襟翼、副翼、缝翼等操纵和流动控制机构的变形飞行器设计,发展比较成熟的技术有:变后掠翼、伸缩翼[6]、折叠翼[7]等。彭悟宇等[8,9]研究不同翼面变形模式,对伸缩、变后掠和二维折叠3种变形模式下的外形在超声速及超高声速条件下进行模拟,比较发现变后掠变形模式具备优良的翼面效率及操稳特性。后续又进行了伸缩翼变形飞行器轨迹的多目标优化,采用MOEA/D 多目标优化算法,发现伸缩翼外形在飞行器的滑翔阶段射程显著提高,前缘的总吸热量也明显降低。与固定翼相比,可变形的伸缩翼极具优势。Benjamin 等[10]设计制造了一种新型低密度和高度柔顺的具有空间谐调刚度的结构,并用于变形机翼,可实现连续的横向扭转,具有高性能的气动特性。不同的变形机翼还需要性能良好的蒙皮使机翼在折展过程中保持光滑连续,保证飞行器的气动性[11]。Wu 等[12]提出了可展开双稳态柔性机构及优化方法,该机构可作为变形机翼蒙皮的内部支撑结构,具有较高的精度和稳定性。以上均是针对飞行器机翼变形的研究,目前变形机翼已经取得较大进展。
飞行器头锥的形状对飞行时产生的阻力和气动热有很大影响,实际飞行器在飞行过程中会经历不同阶段,不同飞行环境下固定头锥性能有限,这就对头锥的适应性提出要求。Li 等[13]提出了变体头锥的概念,变体头锥具有灵活变形的能力,在降低阻力和气动热、提高头锥适应性等方面具有重要意义。她基于曲柄滑块机构设计了一种可展开头锥结构,并通过遗传算法得到最优几何参数。果晓东等[14]设计了基于伞式导杆机构的变体头锥结构,构建虚拟样机并比较了不同驱动工况下变体头锥的运动性能。Zhao 等[15]发现蜜蜂腹部可以进行伸缩和单向弯曲的灵活变形,于是通过类比蜜蜂腹部可变形的仿生角度,进行了变体头锥的设计。Zhang 等[1]同样类比蜜蜂腹部进行了变体头锥的改进设计,并且比较了柔性杆件和刚性杆件的运动特性。梁友鉴等[16]研究蜜蜂腹部肌肉,发现蜜蜂腹部运动依靠肌肉的配合,通过机构异化设计了变胞折展式的变体头锥。以上仿生变体机构均为变体头锥的发展提供了思路。
本文基于蜜蜂腹部的可变形机制设计一种仿生变体机构,选用可自锁的螺旋机构作为驱动,采用三组支链并联的方式,以保证机构变形后的稳定性;通过旋量理论进行变体机构自由度计算,计算结果表明该机构满足变体头锥自由度要求,能够实现伸缩和弯曲,与变体头锥功能相适应,可以作为变体头锥的内部骨架结构。对该变体机构进行动力学分析,检验机构的动态特性,结果表明该仿生变体机构满足头锥变形要求且性能良好。
1 仿生变体机构设计
1.1 蜜蜂腹部变形机制
在蜜蜂飞行时,除了依靠翅膀控制外,腹部在维持平衡、缓解降落冲击等方面也起了重要作用[17]。蜜蜂腹部体节之间可以发生相对运动依靠的是肌肉牵引。为探究蜜蜂腹部节与节之间的运动原理,需要深入了解腹部肌肉的分布规律。结合文献[18]和实验观察了解到,蜜蜂腹部壳内附着大量肌肉,其中体壁肌控制着节与节之间的相对运动。在环肌、纵肌协同作用下,实现蜜蜂腹部的变形。蜜蜂腹部有6个可见体节,节与节之间协同配合完成腹部整体运动,并且在腹部壳体之间有节间褶结构,在节间褶的限制下,蜜蜂腹部能够伸缩和单向弯曲[19-20]。
1.2 仿蜜蜂腹部变体机构设计
参考蜜蜂的分节结构,蜜蜂节与节之间通过肌肉连接,左右两侧肌肉呈对称分布,因此设计变体机构节与节之间通过支链并联进行连接,完成整体机构的伸缩和弯曲。实际上蜜蜂腹部在发生变形后不进行主动恢复,腹部可以一直保持变形状态,因此该机构需要具有维持变形状态的能力,采用螺旋机构作为驱动机构,使机构具有一定的自锁性能。每环之间的连接通过至少3组支链组成稳定分布,从而保证机构变形的稳定性。在此基础上还需考虑生产成本、安装便利、节约耗材等问题,最终选择三支链作为变体机构的内部支撑。
设计变体机构每环之间均采用并联机构相互连接,且连接方式均为3RSH/3RRR,共有6条、3组支链,两条连杆组成RRR 支链的主要作用是伴随驱动支链进行伸缩、弯曲运动,使变体机构连接更稳固。三组支链的连接方式、各个运动副的轴线方向均相同。因此,在进行自由度计算时以其中两环进行分析,得到的结果可以与整体头锥自由度对应,以下分析以环2-环3为例,环2为定平台,环3为动平台。在RSH 支链中,球铰绕Y轴的转动等效为驱动螺杆的转动,因此该球铰的独立自由度为2,将球铰拆分成两个转动副和螺旋副的一部分,变体头锥中任意一组支链机构简图为图1。
根据旋量理论,在坐标系O-XYZ中,支链RSH的运动螺旋可表示为:
式中:旋量Sij表示支链i上的第j个运动副;aij,bij,cij为各螺旋在坐标系中的位置分量。通过互易积计算得到支链RSH 的反螺旋为:
支链RRR 的运动螺旋表示为:
通过互易积计算得到该支链的反螺旋为:
其余两组支链的运动螺旋、反螺旋均相同,因此,环2-环3并联机构的公共约束为
采用修正的Grubler-kutznach 公式[21]计算该并联机构自由度,即
式中:M为机构自由度;d为机构阶数,d=6-λ;λ为公共约束数,λ=1;n为包括机架的构件数目;g为运动副数目;fi为第i个运动副的自由度;υ为多环并联机构在去除公共约束后的冗余约束,υ=t-k;t为多环并联机构所有支链反螺旋去除公共约束后的反螺旋数目,t=9;k为多环并联机构所有支链反螺旋去除公共约束后的反螺旋系的最大无关组,k=3;ξ为机构局部自由度数,0。
计算得到该并联机构的自由度数M=2,包括环3绕X轴的转动和沿Y轴的移动,满足变体机构自由度设计要求。
1.3 变体头锥机构建模
飞行器在大气层内上升时会经过不同层段,头锥伸长减小剖面半径,可以减少飞行时所受的空气阻力;从外太空再入大气层时,飞行器与气流摩擦会产生大量的气动热,此时头锥进行弯曲,可以减小气动热载荷[22]。仿蜜蜂腹部变体机构的变形方式与飞行器头锥的变形要求相同,可以作为变体头锥的内部支撑结构,外部包覆变形蒙皮,实现头锥变形的同时保证整体的密封性。
虽然蜜蜂腹部实际可见6节,但是考虑到整体机构重量和装配成本等问题,仿照蜜蜂腹部变形功能,能够满足变形要求即可,因此本文仅选取两组并联机构进行串联。变体头锥机构整体模型如图2所示,壳体主要尺寸参数见表1。

表1 头锥各节外壳尺寸参数Tab.1 Shell dimensions of each section of the head cone

图2 整体变体头锥机构模型Fig.2 Overall variant head-cone mechanism model
整体头锥机构关于YOZ平面对称,螺旋支链(RSH)作为驱动,仅通过支链1、支链2两条驱动即可,其余支链做从动链保持机构运动的稳定性(图2a))。该机构可实现如图3a)所示的3种状态。

图3 变体头锥机构3种状态Fig.3 Variant head-cone mechanism three states
2 动力学分析
变体机构虽然是多环结构,但是节与节之间的连接支链组成相同,因此,对整体机构的分析可以简化为分析其中相邻两节,通过一组分析可以对应到其余环的运动。由于环2、环3之间的连接支链尺寸较小,所以这里选择环2、环3及其连接支链进行动力学分析。
2.1 动力学仿真
根据变体头锥的设计要求,头锥的伸缩比不低于全长的6%,弯曲角度不小于10°。对机构进行动力学仿真分析,该仿真变形沿Y轴进行伸长收缩运动,绕X轴向Z轴负方向做弯曲运动。添加外部负载50 kPa,在支链1、支链2上添加驱动,驱动转速如图4所示。在0~7 s 上下螺杆驱动速度相同,头锥进行伸长变形;7~15 s 上下两螺杆等速反向转动,产生速度差,进行弯曲变形并弯回;15~22 s 两螺杆等速转动,进行缩短变形。每一个阶段的运动均先加速再减速,进行下一阶段的运动时驱动速度从零开始,可以大大减少机构运动过程中的冲击。
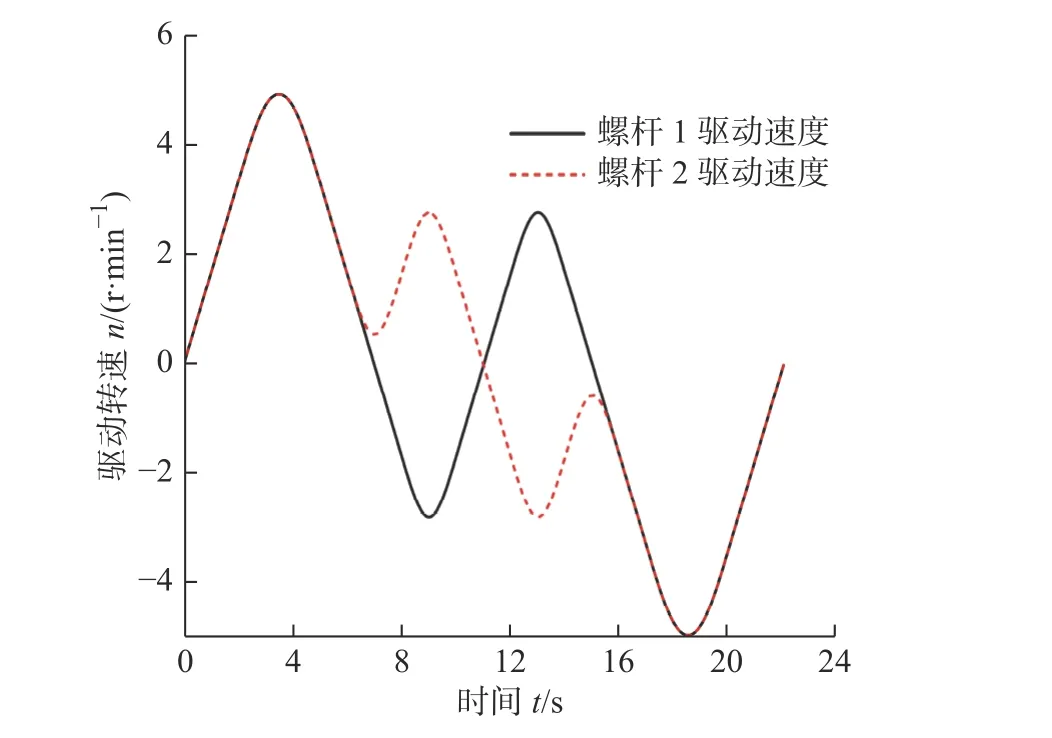
图4 螺杆驱动速度Fig.4 Screw drive speed
得到环3质心在Y、Z两轴方向的位移曲线(图5)。在该运动变形过程中,为保证螺旋运动的可靠性,环3并未达到最大变形位置,两环之间的伸长量 ∆l=25 mm,三环整体头锥可伸长50 mm,伸长率为8.3%,完全满足伸缩比的要求;质心在Z向位移为10 mm,即环3质心通过弯曲在Z向移动的距离,计算得两环弯曲变形的角度为 ∆α=5.1°,完整头锥的变形弯曲角度是叠加关系,因此整体三环机构可以达到的弯曲角度为10.2°,满足头锥的弯曲角度要求。从加速度图像(图6)可看出加速度变化并不剧烈,对机构的冲击较小。由于驱动速度的作用,得到的位移图像和加速度图像都是对称的,即整体机构在伸长和下弯的过程与弯回和缩短的过程等速反向。通过仿真证明,该变体机构设计满足变体头锥变形要求,并且冲击较小,机构的动态性能良好。矩,只添加外部负载,得到环3在5 s 内Y向、Z向位置变化(图7),可见该变体机构变形后,仅在外部负载作用下并不会产生明显的位置变化,因此变体机构满足自锁要求,变形后稳定性可靠。

图6 环3加速度变化Fig.6 Change in acceleration in ring 3

图7 无驱动力矩情况下环3位置变化Fig.7 Position change of ring 3 without driving torque
2.2 自锁校核
选择螺旋传动的原因之一是使头锥变形后能够自锁以保持变形后的稳定性,所以需要校核该螺旋传动的自锁性,通过仿真验证,在分析中撤掉驱动力
2.3 受力分析
变体机构在空载情况下加入驱动,可验证机构的合理性,验证能够达到的最大变形量;加入外部负载可验证头锥受外部负载情况下的运动状况,验证是否满足实际要求。因此,以下分别进行空载和负载情况下的仿真。
仿真得到螺杆1、螺杆2的驱动力矩及它们受到的反力矩。空载情况下,两驱动螺杆所受的驱动力矩和反力矩均很小。伸缩阶段两螺杆驱动力矩和反力矩基本一致,在弯曲阶段,螺杆2转动方向改变,整体机构在螺杆2位置聚拢,受力集中,导致螺杆2所受反力矩增大(图8)。

图8 空载情况下驱动螺杆力矩Fig.8 Driving screw torque under no-load condition
负载情况下,驱动力矩和反力矩均远远大于空载时力矩,且波动较大;在头锥伸长和缩短阶段螺杆1和螺杆2的驱动力矩大小基本一致;在弯曲阶段需要上下两螺杆有速度差,因此两螺杆驱动力矩方向相反(图9a));添加外部负载时两螺杆的反力矩均波动剧烈,伸缩阶段螺杆2受到的反力矩大概为螺杆1的二倍,弯曲阶段二者反力矩均有增大,但基本维持在[-400,400]范围内(图9b)),远小于最大驱动力矩,因此需要根据驱动力矩进行丝杆螺母的选型。
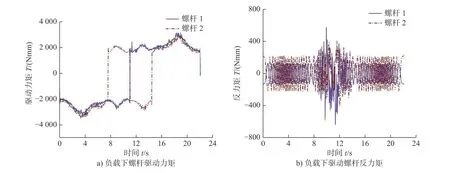
图9 负载情况下驱动螺杆力矩Fig.9 Driving screw torque under load condition
通过动力学仿真,首先可以发现该变体机构的变形量满足设计要求,可以满足变体头锥的变形需要;其次,加速度图像中未产生较大突变,系统运动特性较为平稳,整体运动性能良好;此外,仅施加负载的条件下,整体机构未出现明显变形,该机构具有一定的自锁性,满足自锁性设计要求;最后,比较空载和负载情况下驱动螺杆的驱动力矩和反力矩,明显在负载条件下受力极大,但基本维持在一定范围内,并未出现过大突变。
3 结论
1)基于蜜蜂腹部变形机制设计具有伸缩、弯曲的仿生变体机构。为使变体机构变形后具有一定的自锁性,采用螺旋传动作为驱动机构。采用3RSH/3RRR 并联机构,成三角分布于变体机构内部,保证变形运动的稳定性。
2)通过旋量理论进行自由度计算,计算结果表明该变体机构满足自由度设计要求,符合变体头锥的自由度要求,可以用作变体头锥内部骨架结构。
3)为验证变体机构的动态性能,进行了动力学仿真分析,结果表明所设计的变体机构伸缩比可达8.3%,弯曲角可达10.2°,均满足变体头锥变形要求,动态性能良好,运动较平稳,并且满足自锁设计要求。比较驱动螺杆的驱动力矩和反力矩,发现负载时驱动力矩远大于反力矩。
4)变体头锥通过变形可以提高飞行器的灵活性和适应性,适时减少气动阻力和气动热。目前变体头锥尚处于初步发展阶段,本文给出的仿生变体机构仅是初步设计,还需进一步优化和深入分析,后续还需进行驱动机构校核选型,进而搭建实体模型进行试验;此外,若考虑实际应用,外部还需包覆隔热的变形蒙皮,以保证飞行器密封性和隔热性,本文仅进行了内部变形骨架设计,尚未探讨变形蒙皮的材料选择问题。
