一种智能巡检无人植保机系统的研究
2023-09-17徐维白鹏飞张禹王明泽张宇宙
徐维,白鹏飞,张禹,王明泽,张宇宙
(1.陕西内府中飞机场管理有限公司,陕西 西安 710000;2.首都经济贸易大学,北京 100070;3.中国民航干部管理学院,北京 100102)
无人植保机是中国现代农业、智慧农业、未来农业的重要组成部分,2021 年中央一号文件《中共中央国务院关于全面推进乡村振兴加快农业农村现代化的意见》中,对无人植保机等新技术在共同富裕、乡村振兴领域提出了新的要求,要求在中国平原及广袤农业种植区域优先使用一批先进科技手段,助力中国农业领域发展。无人植保机作为节省劳动资源的重要手段,可为农业生产过程提供高效、可靠、全流程的服务机制。
面对农业喷洒领域的实际需求,以无人机平台、地面终端、软件平台等系统设备为主体,创新突破无人机飞行模式、喷洒路线、地面控制等核心和前沿技术[2],研发自主可控的无人植保设备系统,打造智能化地面控制终端,开发高效化飞行模式控制软件,引领智慧农业建设,全面助力乡村振兴战略的实现。
1 系统介绍
1.1 系统简介
智能巡检无人植保机系统为农作物全生命周期监控提供集智慧巡检、任务上报、运行监控、故障诊断于一体的智慧化服务。建立移动化、流程化的农作物巡检管理机制,提升农作物巡检管理水平;通过无人机智能巡检,实现农作物巡检无人化;通过大数据分析,实现植保无人机设备故障监测诊断;实时监控生产数据,实现对多个农作物站址的集中管控[3]。
该植保机采用创新性的机臂整体折叠方式,可以延长机臂结构件使用寿命。独特设计加长杆喷头,增强药物穿透性,一体式折弯脚架,机底配有防地雷达可根据地形实时改变高度,配备FPV(First Person View,第一人称主视角按时)广角摄像头,可选配8 W LED 照明灯为夜晚作业提供安全保障。搭载专业定制植保飞控,可根据不同作业环境自由更换操作模式,满足不同植保作业需求,标配GPS(Global Positioning System,全球定位系统)、GLONASS(Global Navigation Satellite System,全球卫星导航系统)、BDS(BeiDou Navigation Satellite System,中国北斗卫星导航系统)三合一制式导航模块,实现航向定位控制的更大冗余;配备7 km 数传,防尘防水遥控器,采用FHSS(Frequency-Hopping Spread Spectrum,扩频技术),双路冗余,双天线、双模块设计抗干扰能力增强;最大化利用2.4 G 无线宽带,支持蓝牙、USB(Universal Serial Bus,通用串行总线)双连接,内置电池续航长达2 h,采用嵌入式金属折叠支架,节省空间,提供SDK(Software Development Kit,软件开发工具包)协议文档,搭配移动端APP 调参软件。
1.2 系统功能亮点
在已知某作业区域的地理位置信息条件下,能结合多机平台特性和多种任务载荷能力,实时响应系统任务指令(任务区域、目标类型、任务时间等),自动规划多机和载荷任务;能将系统任务自动分解为多机平台和任务载荷任务;能自动规划各平台路线,优化配置并避免冲突;遭遇突发情况时(任务变更、设备故障等),能重新进行任务自动分配和路径规划;具备任务监视能力;能实现实时检测无人机起降环境;综合考虑状态、时间、气象、地理等多因素约束条件下运维优化决策,构建智能巡检决策与评价软件。
无人机机身采用模块化设计,机身可快速折叠,便于运输,电池支持快速插拔,提高作业补给效率,可选配RTK(Real-Time Kinematic,实时动态)天线,支持双天线抗磁干扰技术,保障飞行安全,植保机专用飞控,提供有AB点作业、手动、全自主3 种飞行模式。AB点作业模式下,分别记录A、B点后,飞行器可延特定路线喷洒农药,用户可设置作业行距、飞行器速度等;手动模式下,用户手动开始与停止喷洒,随时调节飞行速度;全自主模式下,利用打点器打点或飞行器打点,在作业区范围做好标记,APP 内自动生成作业区域,设置好行间距与飞行速度,可一键起飞作业。具备作业恢复功能,全自主与AB点作业时,若中途退出,飞行器可记录中断坐标点,并在规定时间内再次进入该点继续作业。配备防地雷达,不受环境光与尘土的影响,在任何模式下随时启用,实现地形跟随。
在进行无人机任务规划时,对自然气象的观测、预报、预警和防御方面是十分有必要的。利用气象环境检测设备实现对气象要素信息的实时获取,能够检测温度、湿度、含水量、经度、纬度、高度、水平风速、垂直风速等气象要素。该系统通过LoRA(Long Range Radio,远距离无线电)技术进行连接,并可内置北斗/GPS 模块,使设备具有定位与数据传输功能,实现气象数据的获取、处理、标记、储存、传输这一系列过程。
地面气象设备搭载各种传感器可以实时采集温度、湿度、高度、水平风速、垂直风速数据,采集的各种数据可通过无线传输技术传输回地面控制端,地面控制端可及时地存储并分析数据。在信号薄弱的情况下,可以通过北斗短报文系统向北斗卫星反馈信息,并由北斗卫星向地面控制端发送气象数据。
2 航线规划作业及飞行模式介绍
2.1 航线规划作业
该无人植保机系统可根据作业实际需求,进行本地航线和在线航线的选择,本地航线是保存在地面控制端的本地航线,在线航线是保存在云系统的航线。同时,该植保机系统还具备地图选点、飞行器选点、打点器选点等功能,可针对作业需求进行灵活配置。在作业规划界面,可进行间距调整、角度调整、作业边距调整、障碍边距调整、航线保存、航线上传等操作。该无人植保机系统还具备全自主飞行避障系统,可实时感知空中交通态势,根据避障算法,灵活规划航路[4]。
2.2 飞行模式
该植保机系统根据操作人员的能力及意愿配置了多套飞行模式,可选的飞行模式包括姿态-增稳模式、手动作业、AB点作业模式、航线作业模式、自动返航模式等。
2.2.1 姿态-增稳模式
姿态-增稳模式适用于回中遥控器用户,飞行过程中有IMU(Inertial Measurement Unit,惯性测量单元)、GPS、磁罗盘与气压计参与工作。姿态模式可以根据GPS 信号自动切换控制方式,没有GPS 或信号不好时,使用定高飞行;GPS 信号良好时,则可以定点定高飞行。
2.2.2AB点作业模式
AB点作业模式即AB点执行模式,可高效快捷地适用于植保作业,通过用户设置的A、B点进行U 形作业,作业示意图如图1 所示。
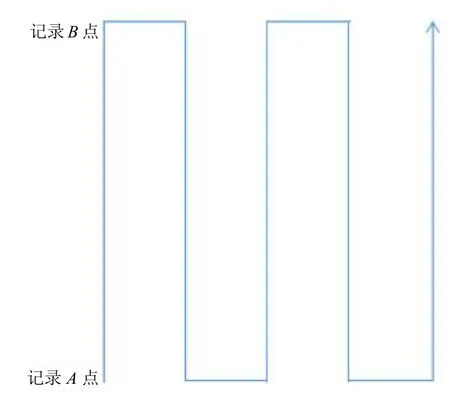
图1 AB 点作业模式示意图
2.2.3 航线作业模式
用户可通过移动端APP 作业系统进行农田测量、航点设置等,移动端APP 可根据感知数据计算并生成最佳航线,实现对作业的智能规划;规划完成后,飞行器将进入航线作业模式按照航线自动执行作业。飞行器具备作业恢复的功能,可以使用雷达模块进行定高、避障及自动绕障。用户可在移动端APP 界面实时调节喷洒用量、飞行速度等。该模式适合用于大面积区域作业中。
2.2.4 自动返航模式
自动返航模式为长距离飞行与失控保护提供了安全保证,在每次飞行前且定位精度达到要求后,用户解锁无人机,飞行器会自动记录当前起始点位置作为返航点,当植保机失控或通信失效时进入自动返航模式。
3 多源协同任务规划平台
无人机编组集成模块主要负责无人机平台与任务载荷的集成工作,能通过控制器控制无人机飞行和载荷执行任务,能在控制器或地面显控台显示无人机平台、载荷状态和视频,每套系统分别包含无人机平台(数传图传、导航定位等)、任务载荷、控制器、地面显控台,并可按照多无人机承载车辆的要求进行无人机的运输和放飞任务,模块架构如图2 所示。
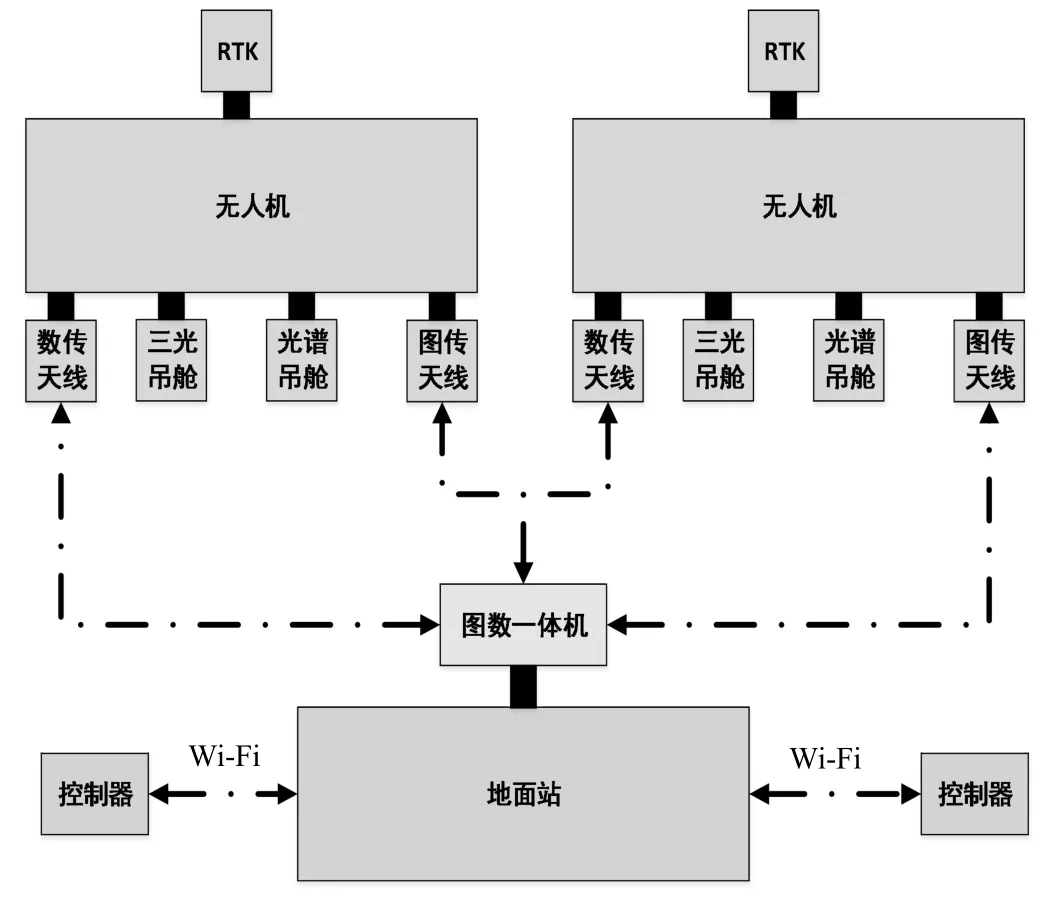
图2 无人机平台与任务载荷集成示意图
该模块由地面站和软件组成地面站系统支持一站控多机,具有完善的多机管理机制,多架无人机状态信息及控制无缝切换,支持MCS(Modulation and Coding Scheme,调制与编码策略)权限管理,用户可基于MCS 协议进行上层应用开发。可进入细致的多机用户交互界面,飞行操作界面一目了然,支持一键自主起降,全自主作业,可自由选择关键信息显示,抛去烦琐复杂的界面,更加专注于飞行。多机测绘航线一键生成,多架飞机同时作业,效率倍增。支持差分基站数据广播,多架无人机仅需通过1 台差分基站数据即可实现高精度作业。优化多机应急切换控制策略,辅助摇杆可快速切换至任意无人机控制,保障飞行安全。
地面控制端在无人植保机系统构成中发挥着重要的角色,能够在数据传输、无人机精准定位、飞行控制等方面发挥重要的作用。
本系统的地面控制端系统具有以下功能与特点:①双天线双模块冗余设计,配合通讯算法,极大增强了信号的通讯能力;FHSS 扩频技术,全角度增益天线,通信距离内完成飞行器的各种操作和配置。②集成数字视频传输功能,可实现SD 分辨率下最远20 km 传输。③内部集成数传电台,可实现最远30 km 传输。④支持USB 连接方式,同时支持S.BUS(Serial Bus,串行总线)、PPM(Pulse Position Modulation,脉冲位置调制,又称脉位调制)、PWM(Pulse Width Modulation,脉宽调制)、串口等多种接口,并支持设备扩展。⑤通过OTG(On-The-Go,电子设备数据交换技术)连接APP,切换MODE(模式),调整正反向、舵量、通道绑定、失控保护值、S.BUS、PPM 输出和数传波特率等数据,提供各参数的保存和载入功能。⑥高集成度数、图、控三合一链路,超小体积,采用铝合金嵌入式折叠支架,结实稳固,夹口360°任意旋转,2 节支杆180°任意调节。⑦基于1 920×1 080分辨率显示屏开发显控界面,具备上下屏显示功能,上屏显示任务状态和载荷视频等信息,下屏基于三维地图对各无人机和载荷进行任务分配和规划。⑧无人机任务规划和控制功能,可基于三维数字地图开发多无人机控制界面,能同时控制6 架无人机,控制参数包括飞行路线、飞行姿态(包括悬停)等。⑨载荷控制功能,可根据任务规划结果,向各任务载荷包括三光载荷、光谱载荷、透窗载荷、穿墙探测载荷、电子探测载荷发送指令。⑩状态和数据显示功能,能显示无人机平台状态和飞行数据,并显示各类载荷图像和回传的目标数据,且能根据无人机飞行参数和任务载荷的性能(覆盖范围)等估算出完成指定区域的任务时间。⑪具备控制权转移功能,可将控制权由集中控制方式(通过多频谱无人机编组任务规划控制软件同时控制多架无人机)切换为单无人机控制模式,由各无人机的控制器对单个无人机进行操控。
4 结束语
本文详细介绍了关于一种智能巡检无人植保机系统的研究,重点对系统组成、飞行模式、多源协同任务规划平台等进行详细介绍。在未来的发展中,无人植保机将进一步与互联网、物联网、大数据、云计算、人工智能等现代信息技术与农业进行深度融合。无人植保机将进一步向智慧农业中的信息感知、定量决策、智能控制、精准投入、个性化服务等方面发展,进一步推动中国农业产业的数字化、智能化、生态化进程,推进中国智慧农业战略的快速实现[5]。