转向电动机与舵轮异轴的自动导引叉车转向检测机构设计
2023-09-16刘济海
刘济海
安徽合力股份有限公司 合肥 230000
0 引言
近年来,随着工业自动化与智能制造的不断深入发展,物流搬运自动化的程度亦同时推进,包括自动导引叉车在内的无人智能搬运载具也迎来较大的发展[1]。自动导引叉车融合了叉车技术和各类自动化技术,同时搭载各种导航技术、构图算法、嵌入式软件和安全防护措施等,能够实现叉车的自动驾驶、物料移载,进行无人作业,可以成功解决工业现场物流搬运任务频繁、员工操作不规范和不专业等问题[2]。目前,自动导引叉车的市场需求旺盛,在机械制造、仓储物流、烟草和汽车制造等行业的应用日益广泛[3,4]。
转向检测机构对车辆当前实时转向角的准确测量是自动导引叉车运动控制技术的重要组成部分,决定了自动导引叉车行驶速度、导航精度和停位精度等运动控制参数和性能指标,是自动导引叉车产品的关键技术[5-7]。故自动导引叉车转向检测机构的设计尤为重要。
目前,市场上单舵轮结构的自动导引叉车转向检测机构主要有同轴布置和异轴布置2 种形式。同轴布置形式直接将转向检测机构与舵轮以同轴方式相连,具有结构简单、传动方式直接和直接获取数据的特点。但这种布置形式的转向轮只能作为从动轮,不带动力,而市场上常用的自动导引叉车舵轮驱动单元一般在转向轮上方直接安装驱动电动机与减速器,转向电动机采用侧置形式安装。转向传感器无法采用同轴布置形式,直接安装在舵轮上。如果将转向传感器直接安装在转向电动机传动轴上,将会使数据换算比过大,造成传感器选型困难或成本过高。使用转向电动机与驱动轮异轴布置的自动导引叉车,可以保证转向电动机的独立性,方便检修、保养和调试。同时,其转向检测机构可以选择和转向电动机安装在一起,也可以选择另外的独立安装位置。
本文为了满足市场需求,针对转向电动机与舵轮同轴布置的自动导引叉车转向检测机构存在的问题,提出设计转向电动机与舵轮异轴布置的自动导引叉车转向检测机构,实现对自动导引叉车舵轮转向角度的准确测量。
1 转向检测机构结构设计
如图1 所示,设计的转向检测机构主要由转向编码器、编码器安装轴、编码器安装支座和编码器齿轮等组成。转向编码器用于准确获取自动导引叉车的转向角度数据。本文将转向编码器设计安装在与舵轮异轴布置的转向检测机构上,通过一定的传动速比,实现对叉车转向角度信号的有效获取。编码器安装轴一端与编码器轴通过轴顶端孔进行固定连接,另一端与编码器齿轮固定连接。编码器安装支座用于固定编码器安装轴及其相关部件,其可以安装在与舵轮异轴的任意部位,通过齿轮的选型实现整个转向检测机构的有效固定。编码器齿轮与编码器安装轴之间固定连接,通过齿轮的合适选型,实现对叉车转向角度信号的准确识别和传递。

图1 自动导引叉车转向检测机构示意图
设计的转向检测机构实现自动导引叉车转向检测的方法如图2 所示,当叉车转向时,转向电动机齿轮驱动舵轮转向齿圈转动,产生一个舵轮转向角度,也就是叉车转向角度;此外,由于舵轮转向齿圈与编码器齿轮啮合,舵轮转向齿圈的转动也会带动编码器齿轮转动一个对应的角度;由于编码器安装轴两端分别与编码器齿轮和编码器轴固定连接,编码器齿轮转动的角度将通过编码器安装轴传输给转向编码器;最后,通过转向编码器采集的数据,结合舵轮转向齿圈与编码器齿轮的传动速比,经过换算即可测量获取叉车的转向角度。

图2 自动导引叉车转向检测机构与舵轮配合示意图
2 转向检测机构准确性保证措施
2.1 编码器齿轮选型
根据驱动单元舵轮转向齿圈的相关数据,进行编码器齿轮的选型。若已知舵轮转向齿圈的模数m1、齿数z1、分度圆直径d1以及编码器齿轮安装位置中心到舵轮转向齿圈中心的距离d,可以计算确定编码器齿轮的模数m2、分度圆直径d2、齿数z2、齿距ρ2、齿全高h2、齿厚S2分别为[8,9]

获得编码器齿轮的基本参数后,依此进行编码器齿轮的详细设计及选型。同时,可以得到舵轮转向齿圈与编码器齿轮的传动速比为
2.2 转向编码器选型
为了实现编码器对叉车转向角度的准确读取,需要在叉车的转向过程中读取足够量的数据。根据不同的叉车运动控制系统,确定该数据的指标为N0。根据上文中编码器齿轮的选型,以及确定的驱动单元舵轮转向齿圈与编码器齿轮的传动速比i,可以计算编码器的需求脉冲数为
将需求脉冲数N转化为对应的编码器单圈脉冲数,进行转向编码器选型。确定编码器的具体参数,需要对编码器的类型进行确定。当前,转向编码器的主要选型分为增量式和绝对值式两大类。
增量式编码器是1 种线性或旋转机电设备,有2 个输出信号A 和B,当设备移动时发出脉冲。许多增量式编码器有一个额外的输出信号,通常指定为分度或Z,它表示编码器位于一个特定的参考位置。此外,一些编码器还提供一个状态输出(通常指定为报警或故障代码),指示内部故障情况,如轴承故障或传感器故障。与绝对值编码器不同,增量式编码器不显示绝对位置,其只报告位置的变化,对于每个报告的位置变化报告运动的方向。因此,为了确定任何特定时刻的绝对位置,有必要将编码器信号发送到增量式编码器接口,后者将跟踪并报告编码器的绝对位置。增量式编码器几乎是在瞬间报告位置变化,这使其能够近乎实时地监测高速机构的运动,故增量式编码器通常用于需要精确测量和控制位置和速度的应用。
绝对值编码器相对增量式编码器而言,其电气特性相对特殊。当电源从编码器上移除时,绝对编码器仍能保持位置信息,而编码器的位置在接通电源后可立即获得。编码器值和被控机械的物理位置之间的关系在装配时就已确定,系统不需要返回校准点来保持位置的准确性。绝对编码器有多个具有不同二进制权重的码圈,提供1 个数据位,代表编码器在一圈内的绝对位置。这种类型的编码器通常被称为并行绝对编码器。多圈绝对旋转编码器包括额外的编码轮和齿形轮。高分辨率的轮子测量小数点的旋转,而低分辨率的齿形码轮则记录轴的整转数。
根据本文中转向检测机构的结构特点,当舵轮转向齿圈发生了一定角度的转动时,编码器安装轴通常已经发生了较多圈的转动。因此,在进行编码器选型时,本文设计的转向检测机构需要选择增量式编码器或多圈绝对值编码器。
若选择增量式编码器,则需在舵轮机构上提供一个特殊的点位,用以标识出较为特殊的参考位置,通常选择舵轮的0°或±90°位置作为参考位置。同时,需要妥善调节参考位置,要求在参考位置时,转向编码器需要能够触发Z 脉冲,以向系统传递舵轮位于特殊位置的信息。为实现此目的,通常会使用光电开关、接近开关等方法触发信息传递窗口(区间),并要求在信息传递窗口内转向编码器有且只有1 个Z 脉冲生成,以保证信息传递的可靠性和准确性。
2.3 编码器与编码器安装轴的固定
如图3 所示,将编码器上带有平面的编码轴插入编码器安装轴内,装配到位后使用紧定螺钉固定。编码器与编码器安装轴的连接松紧程度通过紧定螺钉的安装扭矩进行控制。采用这种固定方式可以实现较为稳定可调的紧定连接,既保证连接的稳定性,防止编码器和编码器安装轴之间的相对滑动,又避免过度固定造成转向编码器的损坏。同时,采用此种固定方式可以使维护保养人员的日常检查更容易,通过编码器安装支座上的操作孔可以方便地检查紧定螺钉是否发生松动,也可以通过松开紧定螺钉方便地拆换转向编码器。

图3 转向编码器和编码器安装轴配合示意图
2.4 编码器齿轮与编码器安装轴的固定
如图4 所示,使用平键进行编码器齿轮与编码器安装轴之间的固定连接。平键的两侧面为工作面,其与编码器齿轮和安装轴上的键槽侧面挤压靠紧,以保证编码器齿轮与编码器安装轴之间没有相对滑动,以及从舵轮转向齿圈向编码器齿轮的扭矩传递。这种连接方式结构简单、装拆方便,且对中性、稳定性好。为了防止编码器齿轮出现轴向窜动,其轴向采用端盖+螺栓方式进行固定。
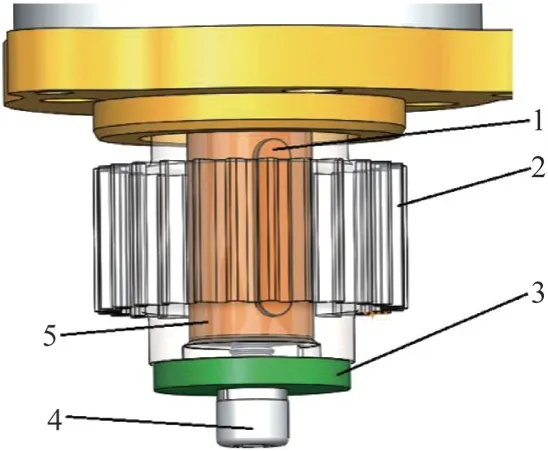
图4 编码器齿轮和编码器安装轴配合示意图
3 转向检测机构的性能效果及创新性分析
3.1 可靠性
本次设计的转向检测机构已在前移式AGV 叉车、插腿式AGV 叉车和平衡重式AGV 叉车等多款单舵轮车型上进行搭载,覆盖了自动导引叉车主流吨位,载重量范围从1.6 t ~6 t 不等。其中某款1.6 t 高起升仓储高端AGV 车型已在物流仓库现场使用超过4 a,单台车型每天连续运行超过18 h,作业场景效率高且强度大,目前该车型已经连续使用超过20 000 h,转向检测机构在此期间未出现结构性损坏或磨损导致转向检测机构失效的情况。证明了本次设计的可靠性。
3.2 可维护性
本次设计的转向检测机构结构紧凑,维护便利性强,可快速拆卸和安装,便于在受外力影响造成物理性损坏或严重磨损时进行维修;可以将转向检测机构在驱动单元上的安装螺栓拆除,拆除转向编码器的连接插件,同时拆除编码器齿轮的固定装置,即可将整个转向检测机构拆除,并根据情况进行部分零件的更换或总成更换。若仅是转向编码器发生损坏或故障,可以单独拆除转向检测机构中编码器安装支座的覆盖件,同时松开结构中的紧定螺钉,即可将转向编码器从编码器安装轴中取出,安装编码器即可按照拆除的逆过程进行,维修过程方便快捷。
3.3 精度测试
为了验证本次设计的转向检测机构的有效性,需要将其安装在实际车辆上进行测试,以检测转向测量机构的误差是否在允许范围内。检测精度测试的原理如下:
在测量前,需要满条件:1)确保有一个所有自动导引叉车使用的反光桶位置已知的测量区域;2)确保有足够的空间驾驶车辆,该区域根据车型的不同、具体空间尺寸的大小可以调整,但空间越大,测试精度越高。
在完成测试准备后,使用自动测试程序完成5 步自动驾驶程序:1)直线前进、后退一定距离,并重复若干次;2)以顺时针方向转圈的方式向前行驶,并重复若干次;3)以逆时针转圈的方式向后行驶,并重复若干次;4)以逆时针转圈的方式向前行驶,并重复若干次;5)以顺时针转圈的方式向后行驶,并重复若干次;
完成5 步自动驾驶程序后,自动导引叉车根据反光桶位置和车辆配备的激光导航头,通过计算车辆的实际位置变化情况和轨迹,得出车辆转向编码器安装角度偏差的实际值;同时,自动导引叉车还会根据测试过程中转向检测机构反馈的编码器运动数据,计算出转向编码器安装角度偏差的计算值。通过比较实际值和计算值的误差大小,可以判断转向检测机构是否准确地测量了车辆的舵轮角度变化,从而确保车辆的安全行驶。
为了验证本文设计的转向检测机构,在某自动导引叉车产品上依据上述测试方法对设计的转向检测机构进行了装车测试。测试中,根据自动导引叉车的标定算法,对转向编码器的偏差值进行连续逼近运算,表1 为具体检测结果。由表中数据可见,检测的最大误差值仅为0.03°,表明本文设计的转向检测机构可以满足自动导引叉车的运行需求。

表1 转向编码器装车测试结果 (°)
3.4 创新性
本次设计提出了一种创新性的转向检测机构,解决单舵轮结构通常需要将转向检测机构或转向编码器直接安装在转向电动机同轴的布置局限,减少了100 ~200 mm 的纵向空间占用,同时转向检测机构可避免转向电动机上加装转向检测机构或转向编码器所需的特殊改造或定制。转向检测机构采用了与转向电动机异轴布置的形式,可应用于采用单舵轮转向结构的工业车辆,这种设计不仅适用于自动导引叉车,其他需要进行转向角度检测的单舵轮转向车辆都可参考本文的转向检测机构进行设计和布局。本文所提出的转向检测机构设计为单舵轮车辆的转向检测提供了更灵活和可行的解决方案。
本次设计采用了创新的部分新结构和新工艺,其中包括:1)使用紧定螺钉连接编码器和编码器安装轴,实现了转向编码器和整个转向检测机构的分离,从而大大降低了结构整体的维修和检测难度;2)采用了键槽、轴承、卡簧等部件组成新型的复合结构,成功实现了编码器安装支座、齿轮、编码器安装轴等部件的联合固定。3)为保证转向检测机构的耐用性和可靠性,本设计使用特殊工艺进行了关键零部件的强化与防护,有效提升了结构的整体性能。本次设计提出的转向检测机构设计不仅创新地采用了新结构和新工艺,还通过增加维修、检测难度低和提高耐用性、可靠性等方面的优化,实现了对传统单舵轮车辆转向检测技术的改进。
4 结语
本文提出设计了一种转向电动机与舵轮异轴布置的自动导引叉车转向检测机构,论述了其结构设计和准确性保证措施,装车测试验证表明本文设计的转向检测机构可以满足自动导引叉车的运行需求。该转向检测机构已经应用在单舵轮自动导引叉车上,使用效果良好,具备在多种形式、多种吨位的类似单舵轮转向车型推广运用的前景。
