采用被动声监测方法识别波弗特海区域海洋水声环境
2023-09-15谢志敏徐全军李晟昊卫翀华
谢志敏 徐全军 李晟昊 卫翀华,4
(1 哈尔滨工程大学水声工程学院 哈尔滨 150001)
(2 海军参谋部军事海洋环境建设办公室 北京 100161)
(3 中国科学院声学研究所 北京 100190)
(4 哈尔滨工程大学 极地海洋声学与技术应用教育部重点实验室 哈尔滨 150001)
0 引言
海洋环境是一个嘈杂的世界,无论是生物活动、自然活动还是人工活动,都会产生大量的噪声,从而改变水下的声学环境。因此,海洋水声环境不是静态的,而是在不同的时间尺度上波动。在极地地区,虽然海冰覆盖会降低海面的风的影响,抑制海浪和气泡的产生,从而降低环境噪声,但是极区水下环境噪声主要受到冰产生的声音的严重影响,这些声音包括冰山和海冰融化、冰裂、冰山崩解、冰山振动、移动冰块之间的剪切和摩擦声,且其具有季节性的起伏和随机性的突发特性,并且也会受到大气环境的影响。北冰洋海域声学环境背景场特性研究,包括海洋环境背景噪声水平[1-4]、组成成分[5-12]、环境噪声特性[13-20]以及传播特性[21-22]等,历来是北极水声研究的热点。在过去的50 年中,对北冰洋冰下海洋环境噪声的研究,主要通过被动噪声监测的方式,或依托于在浮冰群中建立的冰站,在冰层下一定深度处悬挂水听器,研究特定海洋环境噪声源位置与海冰动力学的相关性[1-4]以及环境噪声信号与其产生的物理过程之间的关系[5-9];或通过在波弗特海中部署的一系列漂流浮标,提供一个北极低频声音的长期变化和空间一致性的最完整的记录[15];或利用座底水听器,研究超低频环境噪声的来源以及特性[22],或通过在楚科奇大陆坡上布放自容式水听器,长期记录水下噪声以观测环境噪声时域和频域的变化[23]。而对北冰洋环境噪声方向性分布与冰源噪声的精细关联结构则通过各种复合阵列来观测[12-14]。
近年来,由于气候变化,北冰洋正在经历着巨大的变化,最明显的是夏季冰盖的范围和厚度迅速减少[24-25]以及海洋声波导环境的改变[26-27],以上两点显著改变了北极地区的声学环境,北极的水声环境正经历着环境噪声来源与组成成分的变化[23,28-29],由此导致以前大量的测量结果与模型需要重新研究[30-31]。基于预先编程、自主的声学记录器在北极开展被动声学观测的方法,是极地水声环境研究的主要手段,未来我国北极环境噪声场数据必然会大量依靠现场布放的被动监测浮、潜标进行实时或准实时观测,而不仅仅依靠单一的夏季科考活动。但是目前还没有一种综合的冰下环境场监测数据处理方法,这给声学监测带来了不便;并且北冰洋地区缺乏宽带通信基础条件,数据率有限,无法进行实时数据传输,只能回传特性结果。因此,如何通过现有观测方案和处理数据方法的探索,为脱离北极科考观测和相应数据获取,达到具备长期观测能力,提供观测技术和处理方法的支撑,特别是侧重了解提取什么样的参数组,可以刻画北冰洋海洋环境噪声的特性,需要进一步的研究。此外,如何利用新获取的数据加以分析,与过去的公开发表的结论进行比较,以描述和理解北冰洋水声环境的变化,也是研究重点之一。
本文利用2016 年8 月中国第七次北极科考队在北冰洋浮冰站获取的声学观测数据,采用时间序列分析和统计特性分析方法进行了分析处理,并讨论了其与同时期获取的海洋、大气之间的联系。针对冰下噪声长期监测与实时特性回传,选择了可以用来描述冰下噪声场统计特性的参数组,并给出了处理方法和流程,为实现达到北冰洋冰下噪声场长期观测的能力,指导研究设计和硬件选择的目的。
1 观测概况
1.1 观测区域
中国第七次北极科考期间共进行了两次声学观测实验,其一在长期冰站LIC01 (82◦52′59′′N 159◦46′23′′W),位于北极中央冰区,为多年冰:冰层厚度在1.0∼1.6 m 之间,冰脊顶部约为2.0∼2.7 m;其二在短期冰站SIC06 (76◦18′61′′N 179◦35′85′′E),位于冰缘区,为初年堆积冰:由于风和流的影响,冰层堆积、冰脊较多,厚度在2.0∼2.4 m 之间,冰脊顶部约为3.0∼4.9 m,试验期间的海冰分布变化卫星观测图如图1 所示,数据来源于不莱梅大学,海洋预报中心处理https://seaice.uni-bremen.de/data/amsr2/asi_daygrid_swath/n3125/2016/aug/Arctic 3125/。
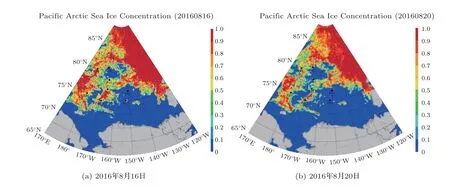
图1 声学观测试验作业海区海冰分布变化Fig.1 Sea ice distribution in the area of acoustic observation experiment
在楚科奇大陆架地区,这个地区近几年出现了一个被称为波弗特波导的海洋学现象,该波导的存在除了显著改善声传播的条件,对低频海洋环境噪声也产生了显著的影响。图2 给出了通过实测的两个站点温盐曲线计算得到的声速剖面。从声速剖面图看,由于冰下暖水层的存在,将声速剖面分成了0∼40 m 的上表面声道与50∼200 m 的下表面声道,形成了双声道波导。
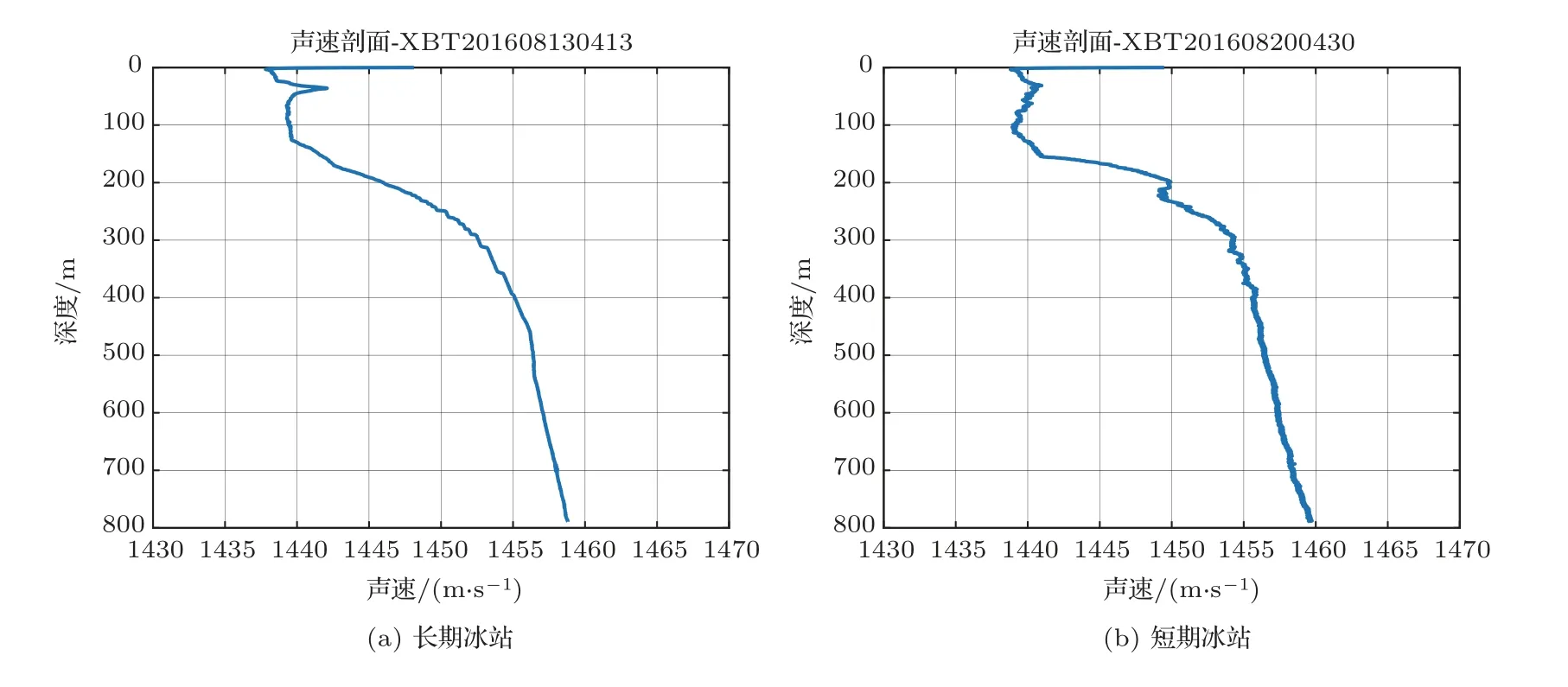
图2 试验现场声速剖面Fig.2 Sound velocity profile at test site
短期冰站声学观测试验时间距离方位与现场图如图3 所示。在风及海流的影响下,短期冰站在2 h 内向北偏西方向漂流了约1 n mile。实验过程中,环境温度、瞬时风速等大气环境数据通过雪龙船上气象观测设备获取,海洋温度剖面数据通过实验期间投放的投弃式温深仪(Expendable bathythermograph,XBT)获取,冰下温盐深数据则通过布置在冰上的剖面式漂流浮标获取。

图3 短期冰站声学观测试验时间距离方位与现场图Fig.3 Time distance azimuth map and actual scene of acoustic observation test in short-term ice station
1.2 冰基观测系统
本文所用的声学数据来自冰上声学观测系统,其布局图如图4 所示。该系统由两部分组成,其一为由6 枚智能水听器icListen HF (接收电压灵敏度为(-171±3) dB @ 10∼100000 Hz,记为1号∼6号阵元)构成的垂直阵,频率范围10∼12000 Hz,采样率32 kHz,分辨率24 位。6 个水听器分为两组,组间布置有自容式温深仪,可根据不同的海洋环境灵活配置阵间距与布放深度;其二为在冰下不同位置处布放的TC4032 标准水听器(差分输出时,接收电压灵敏度为(-164±3) dB @ 5∼125000 Hz),频率范围10∼2500 Hz,采样率32 kHz,分辨率24 位。在长期冰站多年冰下布放时,垂直阵阵元间距2 m,布放在上表面声道内,覆盖从12∼22 m的水层,6号阵元最浅、1 号阵元最深,重点测量上表面声道的环境噪声特性,TC4032 布放在下表面声道,深度约60 m。在短期冰站初年堆积冰下布放时,垂直阵组内每个水听器间隔为2 m,最上层水听器距离冰面40 m,组间间隔为10 m,6 号阵元最浅、1 号阵元最深,使得上下两组水听器分别布放在上下表面声道内。TC4032布放在下表面声道,深度约80 m。
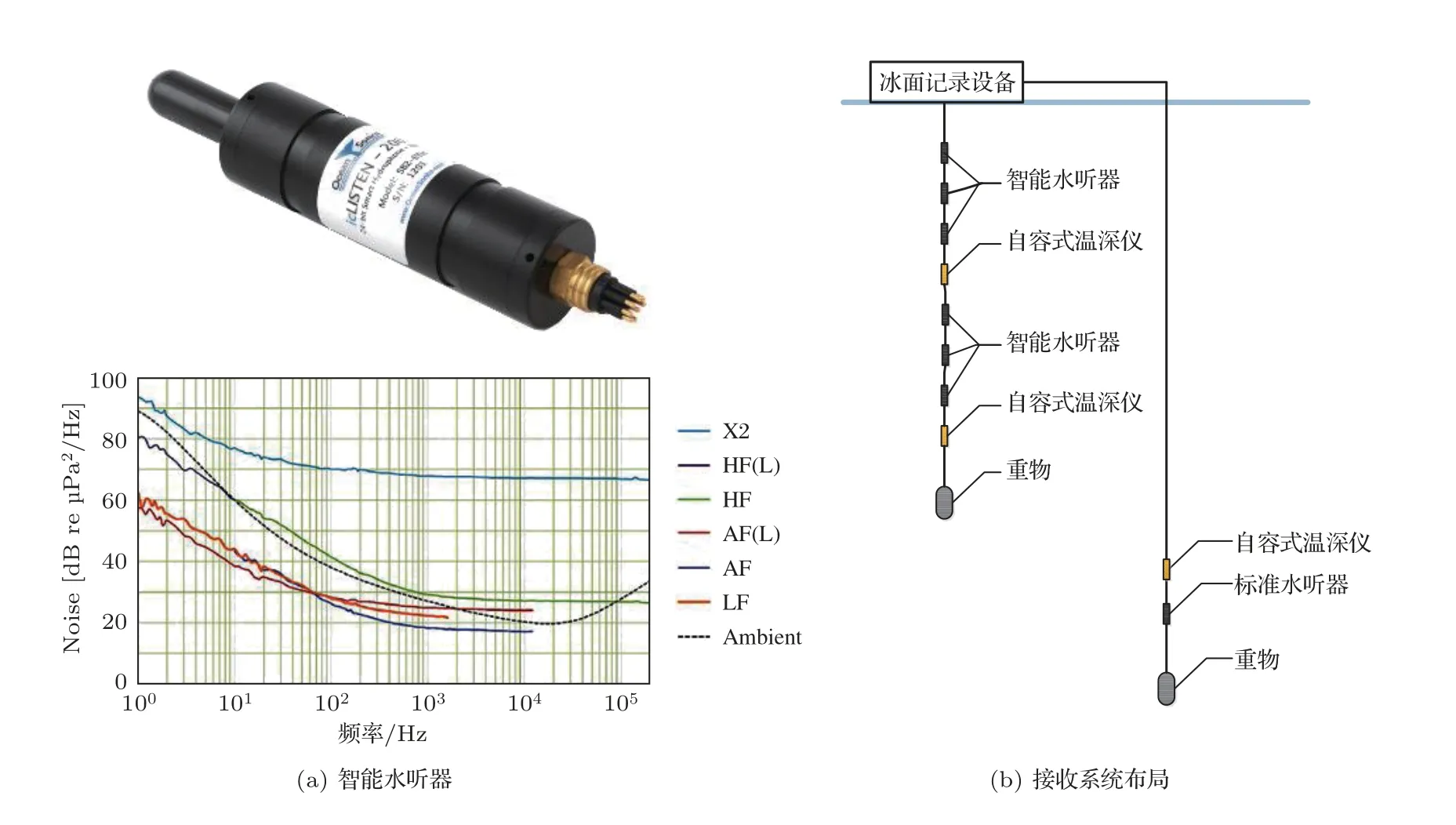
图4 智能水听器及冰站接收系统布局图Fig.4 Layout of intelligent hydrophone and ice station receiving system
2 处理方法
北冰洋冰下海洋环境噪声被建模为一种加性混合噪声,可以描述为缓慢变化的高斯背景噪声和各种单个瞬态信号的叠加。其表达式如下:
式(1)中,b(t)是环境背景噪声,si(t)是可区分的瞬态信号源,而系数µi是一个二进制变量,表示瞬态信号的存在(µi=1)或缺失(µi=0)。
海洋环境噪声作为时间序列信号,现有的常用数据处理方法是谱分析,为国军标推荐采用,也是国际上通行方法。首先计算功率谱密度(Power spectral density,PSD)(dB re 1 µPa2/Hz)来表征整体环境噪声的级别。将所有数据分成10 min 一段的数据进行处理,每次取1 s 数据,使用Welch 算法(1 s 样本、无重叠、Hanning 窗、1 Hz 频率分辨率),先计算每个时长为10 s 的数据段的短时平均功率谱,之后来估计10 min 数据的平均PSD,将得到的功率谱在10∼500 Hz 内取平均值,以获得PSD的估计,代表了10 min 内的长期环境噪声。通过每个时长为10 s 的非重叠数据段算出的PSD,按照ANSI S1.11-2004 标准计算[32],得到1/3 倍频程谱级(TOLs)。
进一步,计算背景噪声级(Acceptable noise level,ANL)(dB re 1 µPa2/Hz)来表征潜在的背景噪声。ANL 在以前的极地水声研究中已经被使用,它可以通过手动去除带有瞬态信号的数据快照来估计[28-30],这里使用自动提取算法,该方法在参考文献[29]中提出。估计ANL的过程依赖于前述的数据段和相同的短时功率谱,不过与平均功率谱不同的是,ANL是根据每个频率所有的谱值计算的第15百分位估算的。具体过程如下:首先,计算所有数据的频率直方图,以产生环境噪声的PSD的经验概率(EPSD)[33]。之后,将10 min ANL 数据在一个频带内平均,得到该频带的平均值。在这里,选择的频段是10∼500 Hz,这种计算过程每个数据段进行一次。
接收到的海洋环境噪声信号的宽带声压级(Sound pressure level,SPL)表示为在整个文件持续时间(10 min)内计算的均方值,计算公式如下:
北冰洋冰下噪声瞬态分量的存在,使得冰下概率分布偏离高斯分布,概率密度分布显见拖尾,本文依据北极海域环境噪声监测数据的时域幅度概率分布计算基本统计结果,首先从概率分布计算出偏度和峰度。偏度,是对不对称的测量,定义为µ3/σ3,在这里µ3是均值的三阶矩,σ是标准差。峰度,是对峰值的测量,定义为µ4/σ4。α稳定分布,是广义上的高斯分布,被认为是适用于描述冰下环境噪声的统计特性[31,34],其特征函数完全由4 个参数α、β、γ、δ唯一确定。目前,已有多种α稳定分布的参数估计方法在不同情况下应用[35-37]。本文采用文献[35]给出的方法对4个参数进行估计。
上述数据处理方法处理流程如图5 所示。给出的时间序列分析处理、谱分析及宽带声压级计算,用来分析冰下环境噪声的谱级、接收源级、时间变化趋势、起伏特性、背景噪声特性、噪声源特性,描述信号中的离散事件和趋势;而时域统计分析,包括获取均值、方差、偏度、峰度、α稳定分布的4个参数估计,可以用来刻画环境噪声时域模型,表征不同时间或地点的变异性和比较声学环境。这些处理方法,在很多研究中已经采用,因此通过这些处理结果组成的参数组,可以与过去的公开发表的结论进行比较,以描述和理解北冰洋水声环境的变化。

图5 处理流程及结果参数组Fig.5 Process flowcharts and result parameter groups
3 观测结果及分析
3.1 时间序列分析结果
垂直阵接收的波形则显示了冰层以及双声道波导对海洋噪声的影响,图6(a)为长期冰站的结果,数据随机抽取,可以看出,虽然雪龙号停靠在附近,辅机处于工作状态,不可避免地抬高了整体噪声水平,越靠近冰层,水听器接收的信号相对较小,接收噪声相对较低,谱级计算结果也支持该结论。这是由于垂直阵阵元都处在上表面声道中,顶部覆盖着大面积的多年冰,冰层起到了隔绝噪声的作用,随着海冰密集度、面积和厚度的增加,声级减小,而远处声源的贡献增大[38]。而由图6(b)可以看出,越靠近冰层,水听器接收的信号幅度相对变大,海洋噪声相对较高。频域的处理结果中差异更明显,上下两组水听器明显分开,谱级差异最大可达5 dB,这是由于垂直阵阵元上下两组水听器分别处在不同的波导中,并且该冰站处于海冰边缘区,但冰层受风和海流的影响,冰脊的比例较大,成为潜在的噪声源,对不同深度水听器的接收产生了影响。

图6 冰下垂直阵不同深度水听器接收波形及谱分析Fig.6 The data waveform and spectral analysis of the different depth hydrophone of under-ice drift vertical array
图7 给出了最深的1 号(15:20)水听器所有时间段数据的平均谱级,图7(b1)为短期冰站第一阶段试验时的数据,此时雪龙船距离短期冰站约为6.2 km,可以看出如不考虑冰站人员活动(02:20)与雪龙船航行噪声(02:30)的影响,冰下的低频环境噪声起伏并不大;图7(b2)为第二阶段试验时的数据,此时雪龙船距离短期冰站为2.7 km,接收端悬挂于冰边缘的水下,此时的噪声起伏比起第一阶段来说要大得多。随着雪龙船的接近以及垂直阵位置的改变,带来噪声的起伏,同时由于海水拍击冰层边缘,使得环境噪声相对较高。

图7 不同时间段噪声平均谱级变化情况(数字代表时分)Fig.7 Variation of average spectral level of noise in different time periods
Roth 等[23]利用一个自容式声学记录仪测量了阿拉斯加州巴罗北部235 m 深的楚科奇海和波弗特海之间的大陆坡上的环境噪声。月平均谱级表明,水面开放的月份的噪声级最高(80∼83 dB@20∼50 Hz),冰覆盖月份的噪声级较低(70 dB@50 Hz)。同时具有冰覆盖和低风速的几个月的噪声级最低(65 dB @50 Hz)。而本文中冰下噪声谱级分析结果表明与其结果中冰覆盖月份的谱级接近,这一方面说明本文的测试结果具有一定代表性,同时也说明北冰洋海域噪声具有明显的时空差异。Makris等[6]认为堆积冰下噪声具有大于1 h 的变化周期,而图7 的结果与此结论相吻合。这个结论可用于指导对北极冰下噪声的观测间隔。
图8给出了短期冰站试验期间环境噪声平均谱级与ANL 的变化情况,图8(a)为实验距离雪龙船62 km 时相对嘈杂的时间段,数字代表百分位数;图8(b)中数字代表时分,分别为实验开始时刻、雪龙船距离6.2 km时、雪龙船距离2.7 km时以及总的ANL。从两图可以看出,无论短时(10 s)或是长时间(170 min),自动提取的ANL 比平均谱级更能反映平稳的环境噪声。

图8 短期冰站环境噪声平均谱级与ANL 变化Fig.8 Variation of mean spectrum level and ANL of short-term ice station
3.2 冰下海洋环境噪声与大气环境的关系
图9 给出了冰下海洋环境噪声与大气环境的关系,将10∼500 Hz 频段内噪声分为两个频段进行处理,10∼100 Hz 这个频段一般认为其噪声主要来自远场[39],100∼500 Hz 频段内被认为与当地风速有关系[14,23,38]。图9(a1)为长期冰站10∼100 Hz频段内噪声与风速的关系,图9(a2)为100∼500 Hz 频段内噪声与风速及气温的关系。在北极中央冰区的大面积冰下,当风速不大于4 m/s 时且不存在突变时,噪声的幅度变化与风速的关系不大,大气温度的变化幅度很小,对噪声的影响可以忽略。图9(b1)结果显示,在10∼100 Hz 内噪声的变化与本地风速之间不存在对应关系。图9(b2)结果显示,100∼500 Hz内的噪声幅度突变与本地风速突变之间存在一定的联系;本地大气温度变化较小时,噪声也不存在突变现象,这是因为气温的突变才会引起冰的热裂解[7,10,40],从而产生噪声。
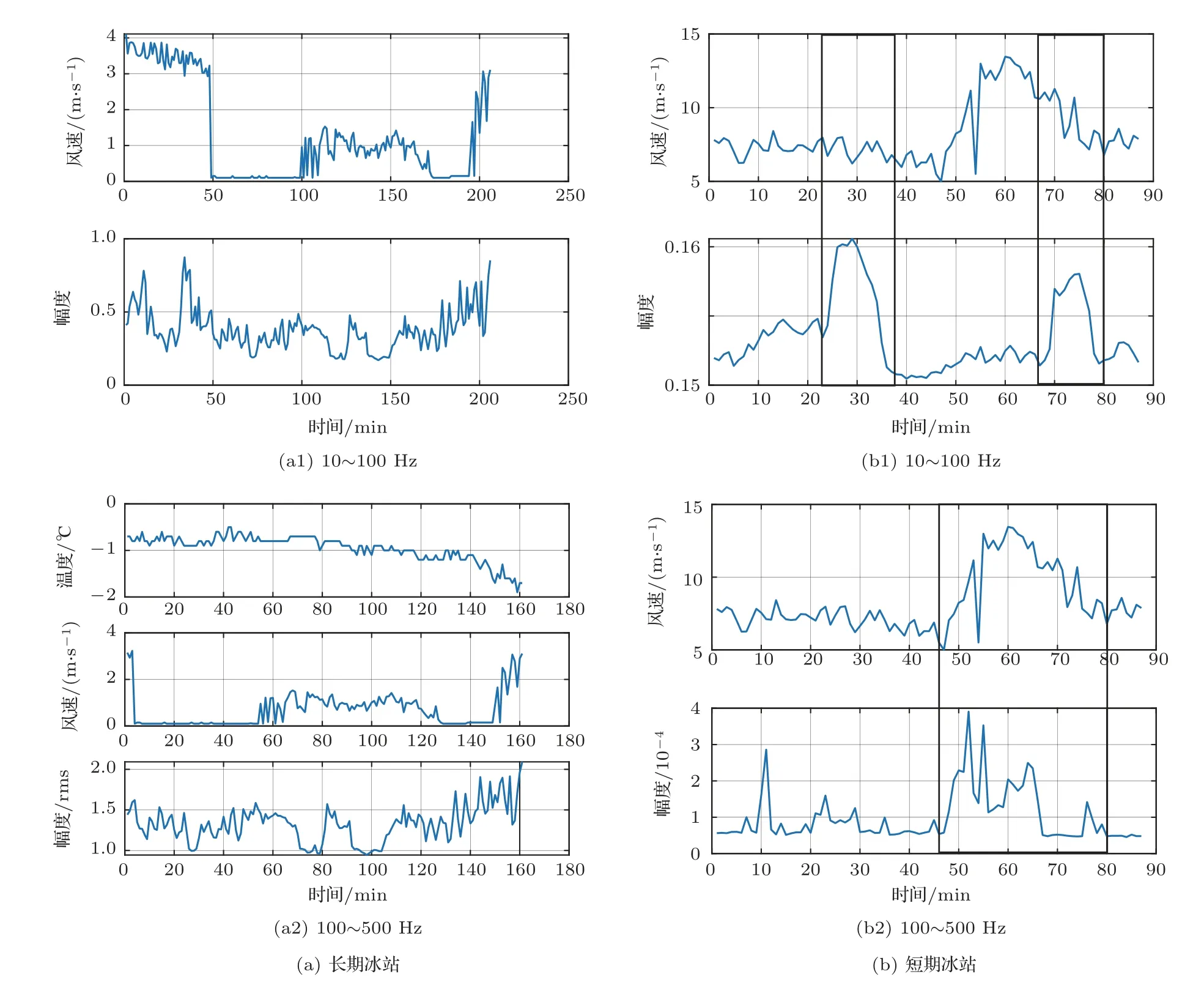
图9 冰下噪声与气温、风速的关系Fig.9 The relationship between underice noise and air temperature and wind speed
3.3 统计特性分析结果
在以往的文献中,认为北极地区的半声道有利于低频(10∼30 Hz)声传播[30],并且该频段可以涵盖北冰洋地区特有的一些季节性洄游鲸目类的发声频段[41],因此将2∼500 Hz 的噪声分解为不同的频段:2∼30 Hz、30∼100 Hz、100∼500 Hz 进行分析,分别对应北冰洋地区的优势传播频段、远场环境噪声频段和近场环境噪声频段。
按照噪声来源不同,选择了3 种不同的噪声场景,因为它们每一种代表了试验过程中遇到的3 种环境噪声中的一种,分别是:近似背景噪声(I类)、冲击噪声占优(II 类)以及船舶航行噪声占优(III 类)。这3种噪声是通过听录音并比较它们的频谱水平来确定的。针对上下表面声道,对以上3 种噪声分别进行分布特性统计分析,结果在表1中给出。

表1 参数估计结果统计Table 1 Statistics of parameter estimation results
因为篇幅的关系,统计分布的结果只给出了30∼100 Hz 段分布特征。为了分析基本统计结果与α稳定分布对冰下海洋环境噪声统计特性描述的符合程度,将UTC 时间20160820015000 数据段30∼100 Hz 频段10 min 数据的时频结果、基本统计结果、经验概率分布统计结果和分布检验结果放在一起显示,如图10、图11 所示。从图中可以看出,统计分析结果,包括均值、方差、偏度、峰度、α稳定分布的4 个参数估计,可以用来刻画环境噪声模型,表征不同时间或地点的变异性和比较声学环境。从表1 看出,这段数据中的冲击噪声主要来源是在2∼30 Hz 频段内很明显的冰源噪声,上表面声道中α、β、γ、δ参数估计值分别为1.60、0.36、0.08、0.05,下表面声道中α、β、γ、δ参数估计值分别为1.98、0.82、0.08、0.17。图中给出的峰度结果对于分析噪声是否存在强冲击噪声及线谱信号具有重要意义,各处理结果的峰度图中黄色标记线为2,红色标记线为3,峰度大于3,说明噪声的分布与高斯噪声相比较为陡峭,具有尖顶峰,而峰度小于3,则说明噪声的分布与高斯噪声相比较为平坦,具有平峰值。偏度与峰度类似,它也是描述噪声分布形态的统计量,其描述的是某总体取值分布的对称性,与α稳定分布中的β值存在一定的对应关系。

图10 冲击噪声占优时上表面声道噪声分布特性(时间:0150)Fig.10 Noise distribution characteristics of upper duct when impact noise dominates(Time: 0150)
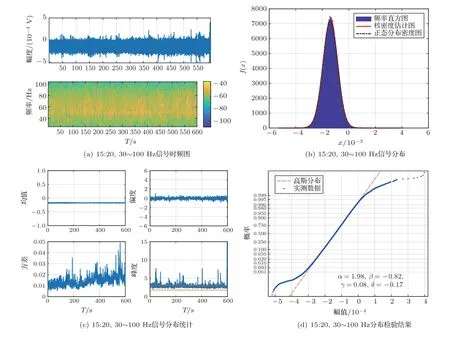
图11 冲击噪声占优时下表面声道噪声分布特性(时间:0150)Fig.11 Noise distribution characteristics of lower duct when impact noise dominates (Time: 0150)
3.4 分析与讨论
从以上的处理结果可以看出,在组成成分方面,接收到的北冰洋环境噪声主要是海洋环境背景噪声、各种离散声学事件产生的瞬态冲击噪声以及包括船舶噪声在内的人为噪声;在水平空间分布方面,北极中央冰区与冰缘区的噪声的形成和特性存在差别,北极中央冰区多年冰的冰下噪声级要低于冰缘区初年冰下的噪声级,在边缘冰区,环境噪声受风和海浪的影响引起了噪声级的增加。
在深度变化方面,双声道波导的存在,与冰层相互作用,对冰下噪声场的影响是显著的,在上表面声道中,100 Hz 以下的频带中,冲击噪声明显,非高斯特性突出。而高频噪声与海冰相互作用,迅速衰减,如果在近场中不存在明显的冲击噪声源,那么高频段的噪声分布接近高斯分布。而对下表面声道而言,上表面声道与冰的存在,相当于在其上形成一个空间滤波器,低频环境噪声被上表面声道过滤,高频被海冰过滤,具有比较低的噪声;并且声道内可形成在上下界面折射传播的特点,来自于相当大范围内的符合独立同分布条件的噪声事件叠加,造成了下表面声道噪声分布的稳定性。因此只有近场存在明显的冲击噪声源时,才会偏离高斯分布。可以说,随着深度的增加,在双声道波导之下,环境噪声的幅度分布更趋于高斯分布。
在时间起伏方面,堆积冰下噪声具有大于1 h的变化周期,这些结论与已发表的论文结果一致。
表2 给出了上述处理结果的数据量和计算频次,分段数据长为10 min 时,以常用的低功耗芯片STM32为例,计算结果可在约1 min内给出[42-43]。当计算结果用浮点数表示时,采用极地地区常用的铱星通信作为数据传输手段,传输时间大约需要70 s,可以做到结果在计算频次内回传,从而做到准实时观测。因此北极地区的冰下噪声观测间隔可以设置为1 h 以上,每1 h 观测约10 min 的时长,可以反映冰下的噪声特性,从而进行北冰洋海洋水声环境的识别。

表2 处理结果的数据量与计算频次统计Table 2 Statistics of data volume and calculation frequency of processing results
4 结论
针对基于被动声学观测的冰下水声环境特性识别,提出了描述水声环境特性的参数组,给出了分析结果,包括分段平均PSD、TOL、ANL 以及SPL等,用来描述冰下环境噪声的谱级、接收源级、时间变化趋势和起伏特性、背景噪声特性、噪声源特性,描述信号中的离散事件和趋势;而时域统计分析结果,包括均值、方差、偏度、峰度、α稳定分布的4 个参数估计,可以用来刻画环境噪声时域模型,表征不同时间或地点的变异性和比较声学环境。
堆积冰下噪声具有大于1 h 的变化周期,冰下噪声观测间隔设置为1 h以上,每1 h观测约10 min的时长,可以反映冰下的噪声特性及其变化,在具备网络通信的条件下,将处理结果回传,可以实现北冰洋水声环境的准实时观测,适用于脱离北极科考进行冰下噪声长期观测和数据获取,回传的实测结果可以与已发表的结论进行比较,可以确切描述和理解北冰洋水声环境的变化。
给出的处理方法和流程,可应用于整个北冰洋海域,为基于被动声监测的冰下水声环境识别,建立北冰洋冰下噪声场长期观测点,提供了研究设计思路和硬件选择方案。
致谢本文工作得到中国第七次北极科学考察队的后勤保障和支持,现场观测过程中得到领队夏立民、首席李院生大力支持以及雷瑞波、刘娜、李涛、杨成浩、孔彬等队友的帮助,在此一并表示衷心感谢。
