海面角反射体电磁散射特性与雷达鉴别研究进展与展望
2023-09-15李郝亮陈思伟
李郝亮 陈思伟
(国防科技大学电子科学学院 长沙 410073)
1 引言
精确制导武器的作战效能是决定战争胜败的关键,世界各军事强国都在大力加强精确制导技术的研究和应用。导引头是精确制导武器的“眼睛”,引导导弹实现对目标的精准打击。雷达作为一种主动传感器,可支持导引头在复杂战场环境下实现全天时、全天候、远距离、高精度制导和打击的作战需求[1-5]。因此,雷达导引头成为精确制导武器末制导的核心设备,在保证现代导弹打击精度方面发挥着重要作用。
在对海攻击时,雷达导引头面临着复杂电磁干扰的严重威胁。除了拦截弹硬毁伤方案外,舰载/舷外有源诱饵[6-8]、箔条[9]和角反射体[10-12]是3种最主要的诱骗干扰手段。其中,海面角反射体具有易携带、便于存储使用等优点,布放后能快速形成雷达假目标,且具有全角域稳定的电磁能量反射性能,覆盖频段广,干扰持续时间长[3],在散射特性、频谱特性、极化特性及抗相参性等方面均具有自身优势,可对雷达制导的武器系统产生明显的干扰、欺骗和诱偏作用。因此,海面角反射体得到了国际主要军事强国的高度重视和实际部署[11-14]。例如,英国研制的海面角反射体干扰系统(又被称为“橡皮鸭”),已出口至美国、法国、荷兰、西班牙等国家,并装备于“伯克”级等主战舰艇。
海面角反射体的应用对反舰导弹突防构成了极大威胁。作为攻击方的反舰导弹,抗干扰技术是其核心能力之一,是决定战场成败的关键[4]。然而,由于角反射体信号与目标信号在时域、频域、空域的显性特征差异严重压缩,角反射体雷达鉴别成为反舰对抗中的重难点问题。因此,研究海面角反射体雷达鉴别技术意义重大。角反射体电磁散射特性研究是提升角反射体雷达鉴别能力的基础。通过揭示舰船和角反射体的电磁散射特性差异是实现角反射体雷达鉴别的重要途径,当前已经形成了一系列代表性方法。本文从海面角反射体装备与战术运用、电磁散射特性以及雷达鉴别3个方面,对海面角反射体雷达鉴别技术的研究进行全面综述,并总结出未来的技术发展趋势。
2 海面角反射体装备与战术运用
2.1 海面角反射体装备发展
在海战场中,角反射体装备大量涌现。海面角反射体的首次实战应用是在1982年的英阿马岛海战中[12]。由于表现出良好的干扰性能,世界各国相继开始研制和部署海面角反射体,其中海面充气式角反射体成为主流装备。
海面充气式角反射体通常由轻质复合材料制成,表面涂覆金属,折叠收缩存放,使用时依靠自身重力或者高压气体进行布放,离舷后自动充气展开成型,漂浮于海面形成干扰诱饵。比较有代表性的是英国的DLF系列。20世纪80年代初,英国埃文宇航公司研发出舷外充气式角反射体干扰系统DLF-1[15]。DLF-1系统采用在甲板上先充气后投放的方式,由于无法快速部署且性能不佳,该公司又先后研制出DLF-2和DLF-3等系统。DLF-2研制于20世纪80年代中期,该角反射体在结构上采用八象限三角形对称结构。DLF-2的雷达散射截面(Radar Cross Section,RCS)相当于一艘护卫舰,可以在X波段形成2000~3000 m2的RCS,在4级海况条件下作用时间可达3小时[12]。由于具有较强的作战性能,该系统已出口到美国、法国、意大利等海军。美国海军引进后命名为AN/SLQ-49(如图1所示),并应用于1991年海湾战争。DLF-3于1996年开始投入使用,采用二十面体三角形结构,由60个大小相等的等腰直角三角形构成(如图2所示)。DLF-3的雷达回波反射能力更强,且RCS在全角域范围内更稳定,同时干扰频率范围可覆盖2~40 GHz[4,6]。该系统采用高压气体弹射诱饵载荷的方式,并使用拉火索来激活内部充气系统为角反射体充气,可在数秒内快速成型部署。DLF-3目前仍在服役,并已装备于英海军护卫舰和驱逐舰等多型主战舰艇。2013年,DLF-3出口至美国,经改进后命名为MK-59充气式角反射体系统[13],并装备于“伯克”级等导弹驱逐舰上。DLF-3角反射体装备弥补了先前角反射体方向性、能量以及工作带宽的不足,能够更加逼真地模拟真实舰船目标的散射特征,欺骗作用更加明显。
2.2 海面角反射体战术运用研究
根据干扰原理与时机不同,海面角反射体可对末制导雷达形成冲淡式干扰和质心式干扰两种主要干扰样式[16]:(1)冲淡式干扰应用于末制导雷达开机前。在末制导雷达的搜索范围内施放多个角反射体假目标,从而使雷达在搜索阶段捕捉舰船目标的概率降低。(2)质心式干扰应用于末制导雷达跟踪阶段。施放的角反射体与舰船同处在末制导雷达的波束内和距离波门内。此时末制导雷达因无法分辨两个目标,从而跟踪舰船和角反射体的能量质心。随着舰船的快速机动,末制导雷达的跟踪点逐渐落在角反射体上,最终丢失舰船目标。图3为冲淡式干扰和质心式干扰示意图。

图3 冲淡式干扰和质心式干扰示意图Fig.3 Diagram of diluted jamming and centroid jamming
海面角反射体的战术运用主要包括角反射体投放时机、投放距离、布放间隔、布放数量以及舰船机动方向、机动速度等因素,通常采用数据建模开展研究[17]。当舰上电子战系统探测到雷达导引头威胁时,舰船需要在数秒内快速做出对抗策略。只有迅速获取敌方信息,准确把握角反射体投放时机,才能增加干扰的成功率[18-23]。为增强角反射体阵列干扰效能,研究人员首先参照箔条开展了针对浮空式角反射体阵列布放寻优的研究[24-27]。文献[28]利用探索性分析方法建立了浮空式角反射体质心干扰的探索空间体系。针对海面角反射体,文献[29]综合利用RCS,高分辨率距离像(High Resolution Range Profile,HRRP)和极化特征,开展了角反射体阵列寻优研究。该研究结果表明,11个角反射体两两间隔5 m布放,能够发挥更好的干扰效果。为了更进一步优化角反射体干扰策略,文献[17]仿真模拟了舰船在面临导弹追踪时,角反射体投放和舰船规避的动态过程,为角反射体质心干扰的实际应用提供了理论依据。
除此之外,角反射体还通常与箔条等其他无源干扰和有源干扰配合使用。作为重要无源干扰手段之一,箔条在海上电子战中一直有着广泛的应用。利用角反射体和箔条组合干扰方式实现干扰互补,通过采取一种动静结合、隐诱相称的质心式干扰策略,可以解决角反射体干扰效果受限于自身展开时间的问题[30]。当前,世界上先进反舰导弹多采用复合制导方式以提高制导精度。针对主被动复合制导雷达,研究人员提出一种结合有源干扰的复合干扰策略[31,32]。具体地,利用舰载有源干扰对末制导雷达实施距离波门拖引,同时在偏离舰船方向上投掷复合诱饵。该复合诱饵由充气式角反射体和有源干扰机组成,可使得主被动雷达均失去跟踪目标,从而保障我方舰船的安全。
因此,随着海面角反射体装备的不断改进以及战术运用,角反射体对抗难度越来越大。此时角反射体雷达鉴别技术尤为关键,这对提高雷达导引头系统在复杂电磁环境中的打击能力和实用效能,具有重要的理论价值和现实意义。
3 海面角反射体电磁散射特性研究
电磁散射特性研究有助于准确解译目标的电磁散射机理,为雷达目标检测与识别提供必要的理论支撑[33-36]。为实现对角反射体电磁散射特性的准确分析,首先需要获取高置信度的目标数据。相较于目标实验测量[37,38]和微波暗室缩比测量[17,39-41],建模仿真具有低成本、易重复的优势,成为研究角反射体电磁散射特性的重要手段之一。建模仿真可分为理论建模仿真和电磁软件仿真两种主要方式。
(1) 理论建模仿真
基于理论建模仿真的电磁散射计算方法主要包括低频数值算法和高频近似算法。低频数值算法可以根据麦克斯韦方程组获得计算结果,通常具有较高的精度,如矩量法(Method of Moment,MoM)[42]、有限元法(Finite Element Method,FEM)[43]和时域有限差分法(Finite Difference Time-Domain,FDTD)[44]等。但是上述低频数值算法计算过程复杂且难以求解大尺寸目标和高频散射。
高频近似算法是基于电磁学中的简化模型或者假设对求解参数进行近似,从而提高计算效率并降低内存需求。研究人员分别将几何光学法(Geometrical Optics,GO)[45]、物理光学法(Physical Optics,PO)[46-48]、迭代物理光学法(Iterative Physical Optics,IPO)[49]、几何绕射理论(Geometrical Theory of Diffraction,GTD)[50]、物理绕射理论(Physical Theory of Diffraction,PTD)[51]和弹跳射线法(Shooting and Bouncing Rays,SBR)[52-54]等高频近似算法用于角反射体的电磁散射计算。此外,研究人员尝试将不同算法特别是性能互补的算法进行融合,相继提出了基于GO-区域投影(Area Projection,AP)混合法[55-58]、PO-AP混合法[59,60]、SBRMoM混合法[61]、IPO-PTD混合法[62]和基于POSBR[63]混合法的角反射体电磁散射计算方法,有效提升了角反射体的电磁计算精度和计算效率。
在实际应用场景中,角反射体干扰漂浮于海面上,复杂海面与角反射体存在多次散射的耦合效应,这使得海面和角反射体的复合电磁散射建模成为需要解决的重要难题[34,36,64]。4路径模型是模拟海面与目标之间多径效应的经典模型[65]。文献[66]利用PO算法和4路径模型计算了海面与目标的复合总散射场,图4为海面角反射体多路径散射示意图。路径1为目标单独的散射(根据目标结构考虑多次散射);路径2为“雷达-海面-目标-雷达”的多次散射;路径3为“雷达-目标-海面-雷达”的多次散射;路径4为“雷达-海面-目标-海面-雷达”的多次散射。同时结合目标在海面的6自由度运动模型和对应参数下的海杂波,实现了海面目标动态回波仿真。在此基础上,研究人员综合分析了角反射体和舰船目标的时域、频域和时频域特性。文献[67]提出了一种基于PO-SBR的复合电磁散射建模方法,有效提高了海面和角反射体复合电磁散射的计算效率。基于该方法,研究人员分析了雷达参数和海面环境对海面角反射体复合电磁散射特性的影响。但是频域算法计算效率较低,而时域计算方法在宽频段和瞬态计算中具有天然优势。文献[68]采用时域弹跳射线法(Time-Domain SBR,TDSBR)仿真了“海面-舰船-角反射体”复合模型的时域电磁散射特性。图5为入射角为45°,方位角为0°,脉冲中心频率为10 GHz,带宽4 GHz的TDSBR时域回波仿真结果。场景中角反射体阵列沿航行方向排列于舰船后方。从图5(a)可以看出,3个角反射体产生了3个离散的尖峰;舰船目标由于结构复杂,存在多个散射中心,因此其回波呈现为多峰。图5(b)为宽频带RCS结果。可以看出,RCS随频率变化呈现较大起伏,且RCS主要来源于舰船和角反射体的贡献。
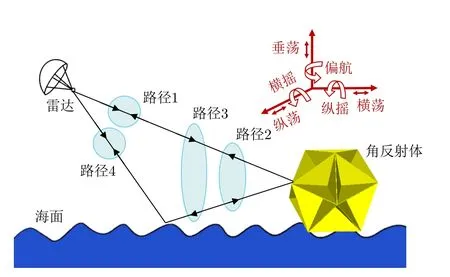
图4 海面角反射体多路径散射示意图Fig.4 Schematic of multipath scattering from sea corner reflector
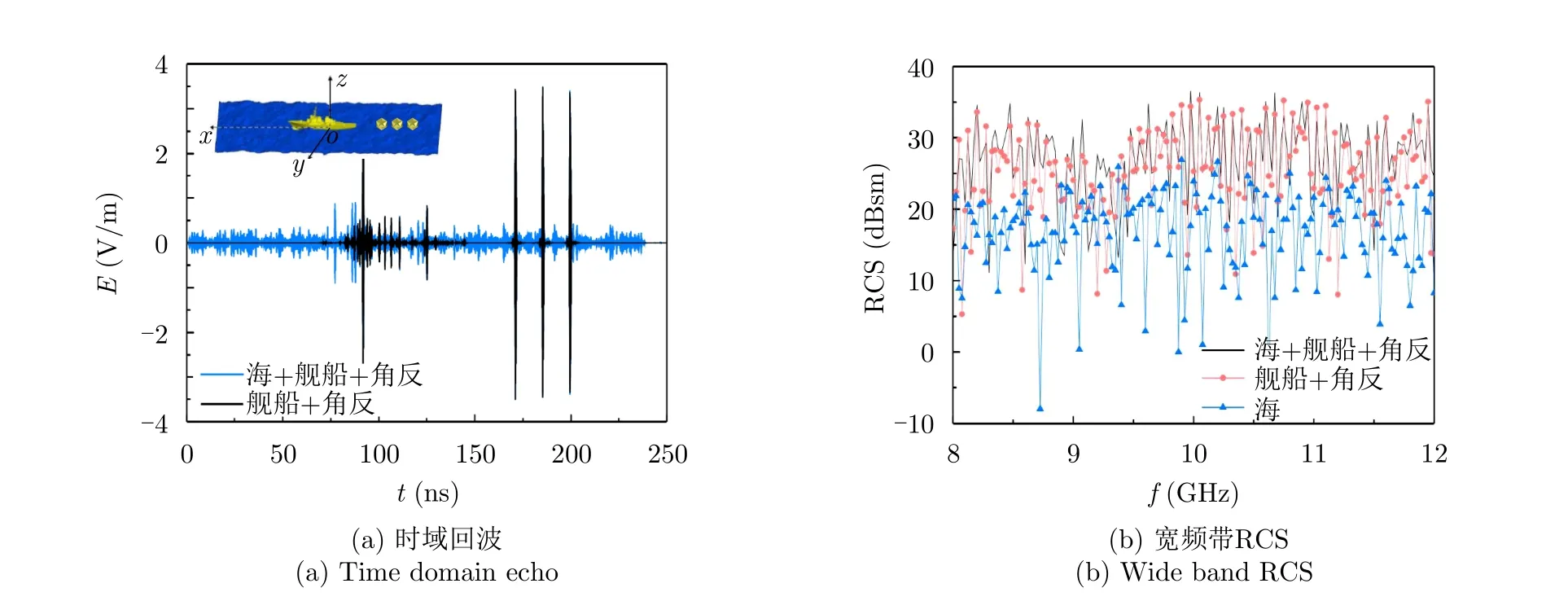
图5 TDSBR时域回波仿真结果[68]Fig.5 Time domain echo simulation results by TDSBR[68]
(2) 电磁软件仿真
XPATCH,FEKO,CST等电磁计算仿真软件是获取雷达目标全极化数据的有效手段[69-75]。基于电磁计算数据,研究人员开展了大量针对角反射体的电磁散射特性分析。文献[69,76]仿真分析了制作偏差对三角形角反射体RCS的影响,为角反射体的生产加工和实际应用提供了指导。文献[77]对二十面体角反射体的RCS进行统计分析,并验证了Burr模型对二十面体角反射体RCS具有较好的拟合效果。图6和图7为八面体角反射体和二十面体角反射体全空域RCS电磁仿真结果。仿真频率为10 GHz,俯仰角为0°~90°,方位角-45°~45°。可以看到,两种角反射体的共极化通道的RCS明显高于交叉极化通道。二十面体角反射体的共极化通道的RCS在整个空域内变化更为稳定,覆盖范围更广。文献[78-81]进一步研究了角反射体双站RCS特性,揭示了双基地雷达与角反射体之间的几何关系对角反射体RCS的影响规律。文献[82]结合海面生成模型构建了角反射体/舰船与不同海况海面的复合三维模型并进行电磁计算,复合模型示意图如图8所示。图9和图10为仿真频率10 GHz时海面与角反射体复合模型的极化散射分布。从图中可以看出,海况对海面与角反射体的复合散射影响比较明显。随着海况等级的增大,共极化通道的RCS起伏加快,交叉极化通道的RCS增大。
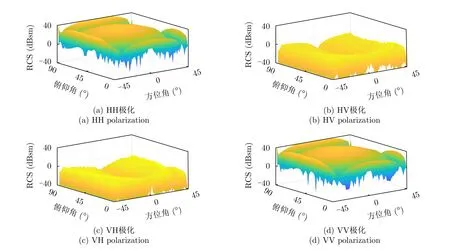
图6 八面体角反射体RCS仿真结果Fig.6 RCS simulation results from octahedral corner reflector
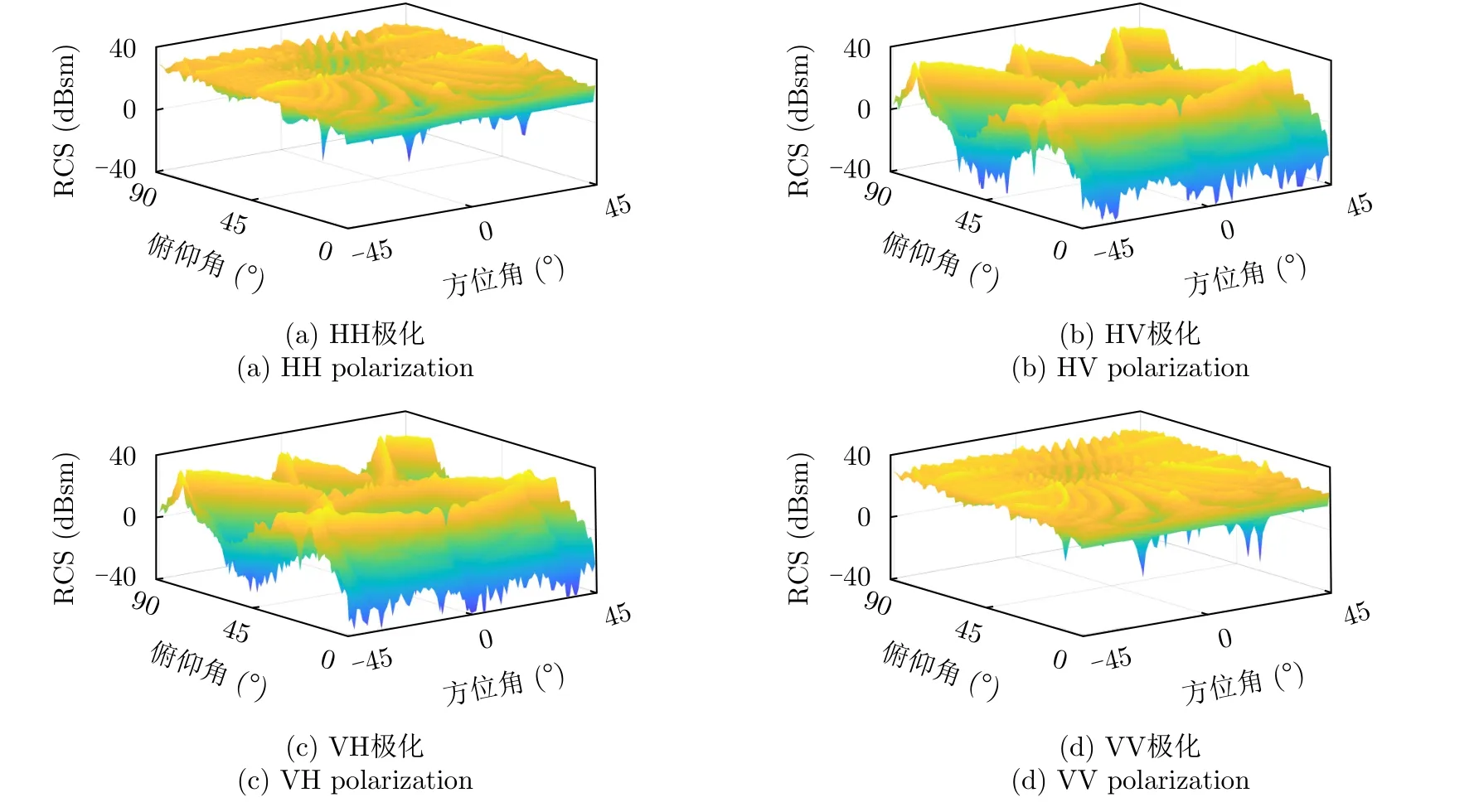
图7 二十面体角反射体RCS仿真结果Fig.7 RCS simulation results from icosahedral corner reflector
图8 海面与目标的复合模型[82]Fig.8 Composite models from sea surface and target[82]

图10 海面与二十面体角反射体复合模型的极化散射分布[82]Fig.10 Polarimetric scattering distribution of composite model from sea surface and icosahedral corner reflector[82]
基于电磁计算数据,还可以对“海面-舰船-角反射体”复合场景进行HRRP和二维成像仿真。图11给出了“海面-舰船-角反射体”复合模型的HRRP仿真结果。其中,雷达入射俯仰角分别为30°,40°和50°,雷达方位角为20°,中心频率10 GHz,带宽100 MHz。沿船头方向为方位角0°,垂直甲板向下为俯仰角0°。场景中设置了3个二十面体角反射体和一艘舰船,角反射体阵列沿舰船航行方向排列且与舰船相距一定间隔。海面大小300 m×200 m。从图中可以看到,舰船目标HRRP与角反射体阵列都为离散的尖峰组成,两者较为相似且难以区分。随着俯仰角的变化,舰船目标HRRP各散射中心变化明显,而角反射体变化较小。图12给出了“海面-舰船-角反射体”复合缩比模型的二维成像仿真结果。其中雷达俯仰角为30°,中心频率为10 GHz,距离和方位分辨率为0.15 m。场景中设置了6对二十面体角反射体和一艘舰船,海面大小15 m×10 m。图12(a)和图12(b)分别为雷达入射方位角0°和45°的二维成像结果。可以看到入射方位角为0°时,舰船和角反射体散射较强;而当入射方位角为45°时,海面散射强度增大,海面与目标耦合作用增强。
图11 “海面-舰船-角反射体”复合模型的HRRP仿真结果Fig.11 HRRP simulation results of the ‘sea surface-ship-corner reflector’ composite model
图12 “海面-舰船-角反射体”复合模型的二维成像仿真结果Fig.12 2D imaging simulation results of the ‘sea surface-ship-corner reflector’ composite model
此外,针对当前角反射体数据样本不足的问题,文献[14]结合实测极化雷达数据和典型角反射体电磁计算数据,通过信号级成像叠加仿真生成了不同场景的极化雷达角反射体干扰仿真数据,其构建流程如图13所示。电磁仿真计算为角反射体电磁散射特性分析与鉴别研究提供了丰富的数据样本。
图13 极化雷达角反射体干扰仿真数据构建流程Fig.13 Flowchart of polarimetric radar corner reflector jamming simulation data construction
4 海面角反射体雷达鉴别方法
海面角反射体雷达鉴别的常用方法是利用舰船目标和角反射体干扰的散射特性差异,人工提取出具有鉴别能力的特征,并利用分类器来确定干扰和目标类型。该类方法包括了基于HRRP特征的鉴别方法、基于运动特征的鉴别方法和基于极化特征的鉴别方法。随着深度学习理论和方法的不断发展与应用,基于数据驱动的深度学习方法能够自动提取特征,且可以获得更好的鉴别效果。目前,海面角反射体雷达鉴别方法大致分为基于特征提取的鉴别方法和基于深度学习的鉴别方法两类。
4.1 基于特征提取的角反射体鉴别方法
(1) HRRP特征
雷达通过发射大带宽信号,可以获得目标距离上的高分辨率。HRRP可以反映目标的几何形状、尺寸大小、材料等信息[83]。由于舰船目标结构复杂,在电磁波照射下等效于多散射中心组成的连续扩展分布,其回波呈现为多峰。角反射体干扰等效于离散的点目标。通过提取HRRP的结构特征可以实现舰船目标和角反射体的有效辨识。受该思路启发,文献[84]基于强散射点包络特征提出了连续统计跟踪算法。通过连续统计相对最强散射点窗内高于阈值的单元数并与设定的单元数阈值进行比较,从而有效对抗角反射体质心干扰。文献[38]对舰船和单个角反射体HRRP实测数据进行分析,并结合支持向量机(Support Vector Machine,SVM)分类器开展了鉴别实验。针对角反射体阵列干扰,文献[66]提取了散射中心数目、径向尺寸和散射对称性值等3个HRRP特征对角反射体阵列和舰船目标的可分性进行对比分析。图14给出了上述3个特征在对海实测数据中的统计结果。数据中包含了角反射体阵列和一艘舰船,角反射体阵列由两个充气式二十面体角反射体组成。可以看到,舰船的散射中心数目、径向尺寸和散射对称性值都大于角反射体阵列,且都具有较好的可分性。文献[85]提取了7个与目标物理结构密切相关的平移不变特征构建特征向量,用于舰船目标和角反射体阵列的鉴别。随着压缩感知技术的发展,文献[86]利用稀疏字典学习对目标HRRP进行重构,提出一种基于重构误差比值的角反射体鉴别方法。为便于研究人员参考,表1归纳了用于角反射体鉴别的HRRP特征。然而,由于HRRP敏感于雷达观测角度,且随着角反射体数量的增加,舰船与角反射体阵列在HRRP中的差异减小,进而导致上述基于HRRP特征的鉴别方法在实际角反射体阵列对抗应用中并不稳健。
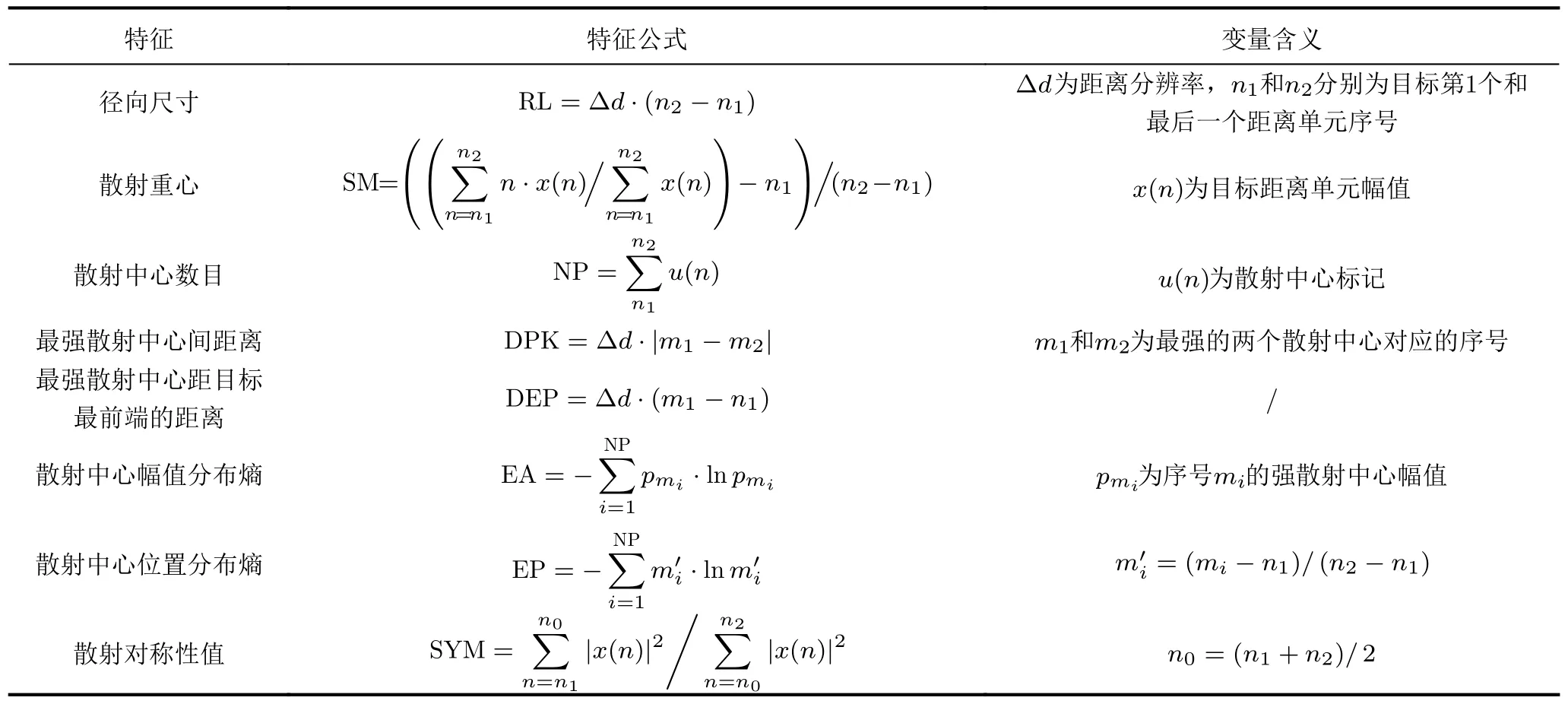
表1 用于角反射体雷达鉴别的HRRP特征归纳表Tab.1 Summary of HRRP features for corner reflector radar identification
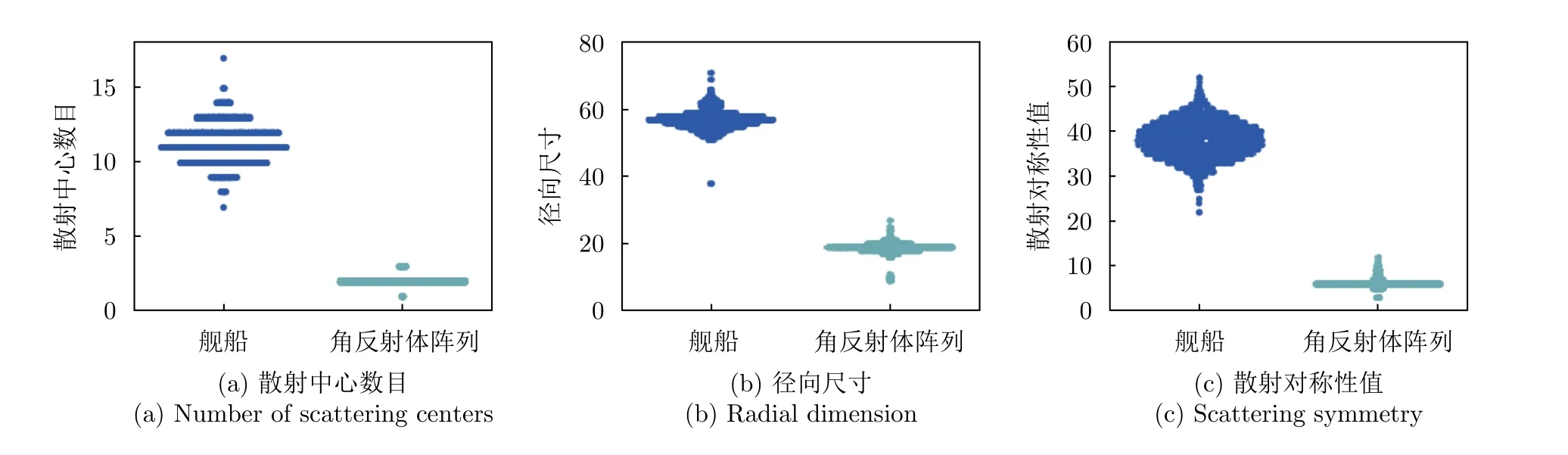
图14 HRRP特征可分性Fig.14 Separability of HRRP features
(2) 运动特征
当投放角反射体后,舰船会进行合理的战术机动。角反射体和舰船目标运动速度的差异会导致多普勒谱的变化。基于上述原理,文献[66]对舰船目标和角反射体干扰的频域功率谱特性进行了仿真分析,指出角反射体干扰的多普勒展宽小于舰船目标,并提取了功率谱变化区间特征用于角反射体鉴别。文献[87]利用多普勒频移计算雷达与目标的相对径向速度,并提出了一种基于速度线性方程组总剩余范数的真假目标识别算法。文献[84]综合利用舰船和角反射体干扰的多普勒频移和多普勒展宽的特性差异进行角反射体干扰鉴别,并在车载实测数据上进行了验证,结果如图15所示。然而上述方法只适用于舰船目标和角反射体存在速度差异的情况下。拖曳式角反射体的运动方向和速度与舰船目标近似相同,这种情况下上述方法将会失效[16]。
图15 基于多普勒特性鉴别角反射体干扰[84]Fig.15 Corner reflector jamming identification based on Doppler characteristics[84]
此外,目标会随海浪起伏伴有进动和摆动等形式的运动,加之舰船自身产生微动的零部件多,使舰船具有丰富的微动特性。微动会对电磁波频率进行调制,从而引发不同目标回波具有不同的微多普勒[88,89]。通过短时傅里叶变换(Short-Time Fourier Transform,STFT)、平滑伪魏格纳-维尔分布(Smoothed Pseudo Wigner-Ville Distribution,SPWVD)等时频分析方法可以提取目标微动信息。文献[66]对海面舰船和角反射体的时频特性开展了研究,图16为3级海况下仿真的舰船和角反射体时频分布图。仿真的雷达中心频率为17 GHz,带宽为100 MHz,脉冲重复周期为150 µs。可以看出,角反射体的微多普勒频率随时间变化幅度较大,且近似于正弦曲线;而舰船的微多普勒频率随时间变化幅度很小。两者微多普勒的差异源于舰船和角反射体本身尺寸和重量的不同。相比于舰船,角反射体随海浪起伏较大且起伏速度快。文献[90]基于X波段雷达导引头实测数据开展分析并得到了相同的特性结果。由于目标的微动特征能反映目标结构、尺寸等内在属性,且测量不受雷达信号带宽限制[88],因此微动特征可以作为角反射体干扰鉴别的又一重要特征参数。
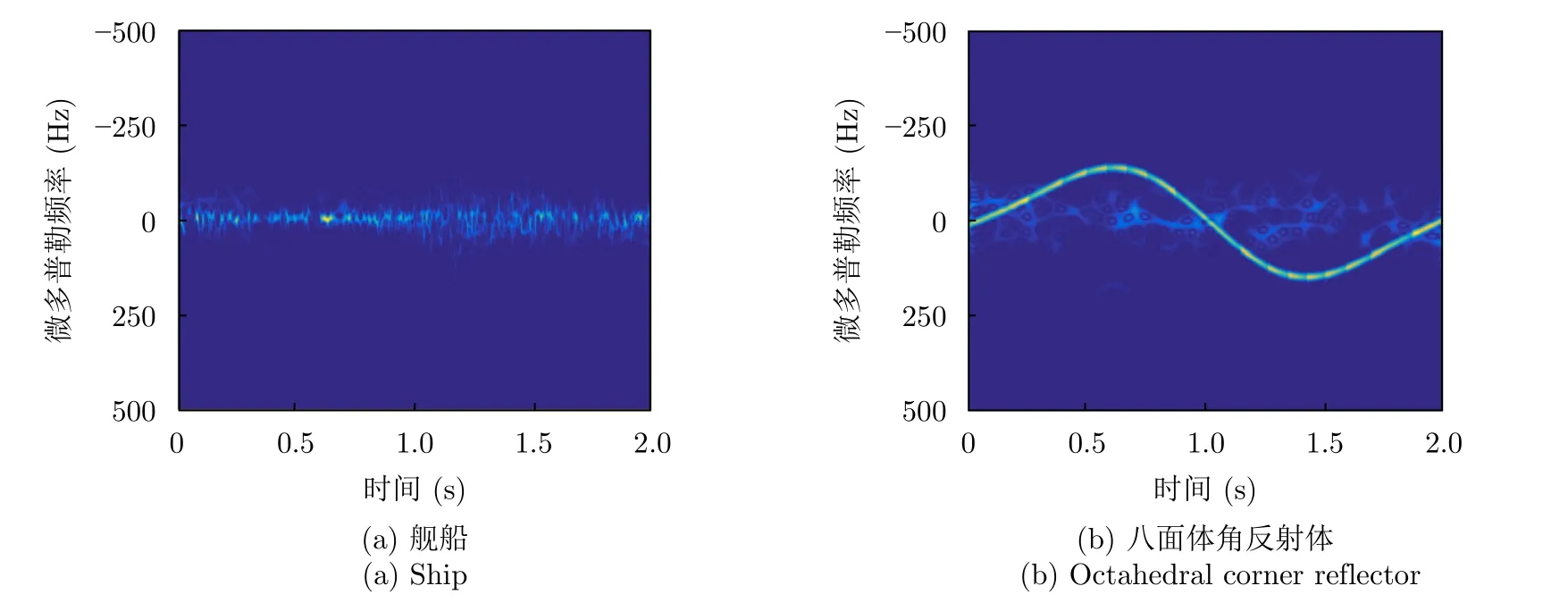
图16 舰船和角反射体时频分布图[66]Fig.16 Time-frequency distribution of ship and corner reflector[66]
文献[66]提取出用于度量瞬时微多普勒频率震荡幅度的瞬时微多普勒频率全变差:
其中,N为蒙特卡罗实验次数,fN(n) 为第N次实验第n时刻的微多普勒频率。
文献[91]结合海况等级和角反射体载体的水动力系数,构建了不同海况下海面舰船目标和角反射体的运动仿真模型。通过对目标回波的微多普勒谱进行分析,提取出微多普勒主频率周期特征[92]:
其中,MD(d)为 微多普勒谱,D为傅里叶变换的采样点数。MF表征了目标微多普勒的主频率分量,反映了目标的固有谐振频率大小。舰船目标由于尺寸和重量较大,摆动幅度小于角反射体,故二者的微多普勒主频率周期特征存在差异。通过设定鉴别阈值可有效区分舰船和角反射体干扰,鉴别结果如图17所示。可以看出,在信噪比大于0 dB的条件下,角反射体干扰的正确鉴别率大于95%。
除上述特征外,文献[37]还从目标回波的微多普勒谱中提取出时频谱熵和微多普勒半周期频差最大值用于描述目标的时频特性:
其中,ρ(tm,f)为 微多普勒谱密度,f(tm)为瞬时频率值,为周期频差平均值。
基于MF,EF和DF 3种微多普勒特征,研究人员提出了一种结合三参数的角反射体干扰鉴别方法[37]。然而,基于微多普勒特征的角反射体干扰鉴别方法受海面强杂波与目标运动影响较大,对目标微多普勒的观测本身需要的条件也非常苛刻,可能导致实际鉴别效果有限。
(3) 极化特征
极化是电磁波的本质属性,是幅度、频率、相位外又一可资利用的重要信息。雷达目标具有变极化效应,即目标回波的极化状态相对于入射波会发生改变,其与目标的姿态、尺寸、结构、材料等物理属性密切相关。在水平垂直极化基(H,V)下,极化雷达获取的目标全极化信息可以由极化散射矩阵表征:
其中,SHV表示垂直极化发射、水平极化接收的复散射系数,矩阵中其他3个元素可类似定义。极化信息的处理和利用对提升雷达导引头的探测能力具有极大潜力。
极化目标分解是目标极化散射建模与解译的主流理论工具[93-95]。相干极化目标分解通常被用于人造目标解译,代表性方法有Pauli分解[96]、Krogager分解[97]和Cameron分解[98]。由于几何结构上具有显著不同的差异,舰船和角反射体具有不同的极化散射机理。角反射体主要以奇次散射为主,而舰船目标主要以偶次散射为主,且包含表面散射、体散射、螺旋散射等多种散射机理。通过分解得到的极化参数可以用来区分舰船目标和角反射体。基于上述原理,文献[99,100]利用Krogager分解特征开展了角反射体干扰鉴别。考虑到海杂波对目极化散射解译的影响,文献[101]优化了舰船的偶次散射模型和角反射体的奇次散射模型,并结合极化相似性参数实现了对角反射体和舰船的有效区分。然而,单独利用极化信息难以全面反映目标的散射特性,文献[102]利用4个HRRP特征和2个极化特征实现了双极化雷达的角反射体鉴别。文献[103]提出一种基于归一化互信息的全局最优特征选择算法,从39个全极化HRRP特征中优选出辨别力强、冗余度低的特征。图18为利用K最近邻(K-Nearest Neighbor,K-NN)分类器输出的不同特征集尺寸下的目标分类正确率。每条曲线表示不同方位角度域的目标数据。结果表明特征子集尺寸为25时可以达到最高的分类正确率。此外,针对Krogager分解受噪声影响大的问题,文献[104]提出了一种基于主极化的角反射体分解方法,可以在杂波中准确得到角反射体的奇次散射和偶次散射系数。在此基础上,通过构建描述时空特性的均方误差参数,提出了一种基于空-时-极化联合域的角反射体鉴别方法。但是,雷达目标散射响应具有很强的方位敏感性,极化目标分解方法存在散射机理解译失真问题[93],其鉴别量性能不够稳健。
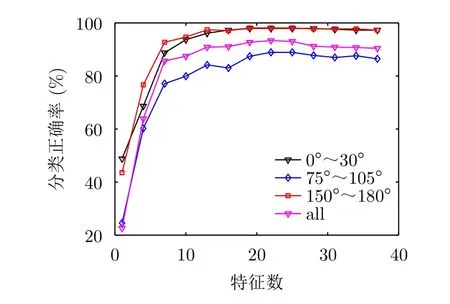
图18 不同特征集尺寸下的分类正确率[103]Fig.18 Classification accuracy with different feature set sizes[103]
为了缓解雷达目标散射响应的方位敏感性,研究人员将极化旋转不变特征(Polarimetric Roll-Invariant,PRI)用于角反射体鉴别[105-107],其在绕雷达视线上具有与目标方向无关的重要特性[108]。文献[109]利用Cloude-Pottier极化分解和极化旋转不变特征构建特征向量,并结合SVM实现了较好的角反射体鉴别效果。但是部分极化旋转不变特征敏感于目标尺寸,进而会影响角反射体鉴别效果。
雷达目标的后向散射敏感于目标姿态与雷达视线的相对几何关系,这种散射多样性中也蕴含着丰富的极化散射信息,文献[110,111]提出一种在绕雷达视线旋转域解译目标散射机理的新思路,建立了极化旋转域解译理论,用于挖掘目标散射多样性中的隐含信息,近年来也得到研究人员的高度重视[112-117]。文献[82,118]利用极化旋转域相关方向图解译工具揭示了全方位角度下八面体角反射体和二十面体角反射体的极化旋转域特性演化规律。图19给出了角反射体与舰船的极化旋转域特征流形图。发现在整个俯仰角和方位角范围内,角反射体均有大量满足旋转不变性的区域;而舰船目标通常结构更为复杂,不具备几何结构的中心对称性,因此不具有极化旋转不变性。这给角反射体的准确鉴别提供了新途径。基于此,研究人员开展了角反射体干扰的极化旋转域鉴别研究[14,82,119-121]。通过优选高辨识度的极化鉴别特征量,提出了基于极化相关方向图特征(Polarimetric Correlation Pattern,PCP)的角反射体干扰鉴别方法,并利用极化雷达角反射体干扰仿真数据开展对比实验,鉴别结果如图20所示。图中绿色方框代表正确鉴别的舰船,红色方框代表正确鉴别的角反射体,黄色方框代表错误鉴别。对比结果验证了PCP方法优势明显。此外,最近有研究表明,通过极化域变焦处理调控雷达收发极化,可以有效提升雷达信息获取能力,从而增强角反射体干扰鉴别的能力[122,123]。

图20 不同角反射体鉴别方法与PCP的对比结果[14]Fig.20 Comparison results among different corner reflector identifier with PCP[14]
表2归纳了用于角反射体干扰鉴别的极化特征,以便于研究人员参考。为了定量评估上述极化特征对角反射体干扰的鉴别性能,利用构建的极化雷达角反射体干扰仿真数据开展分析。一般来讲,信干比(Signal-to-Jamming Ratio,SJR)越大表示该极化特征对于角反射体干扰的抑制效果越好,能获得更好的鉴别性能。分别选取10个舰船样本和10个角反射体样本,得到的极化特征信干比均值如图21所示。可以看到,极化相关起伏度、极化相关对比度和极化相关特征反熵的信干比最高,在区分舰船和角反射体方面具有显著优势。
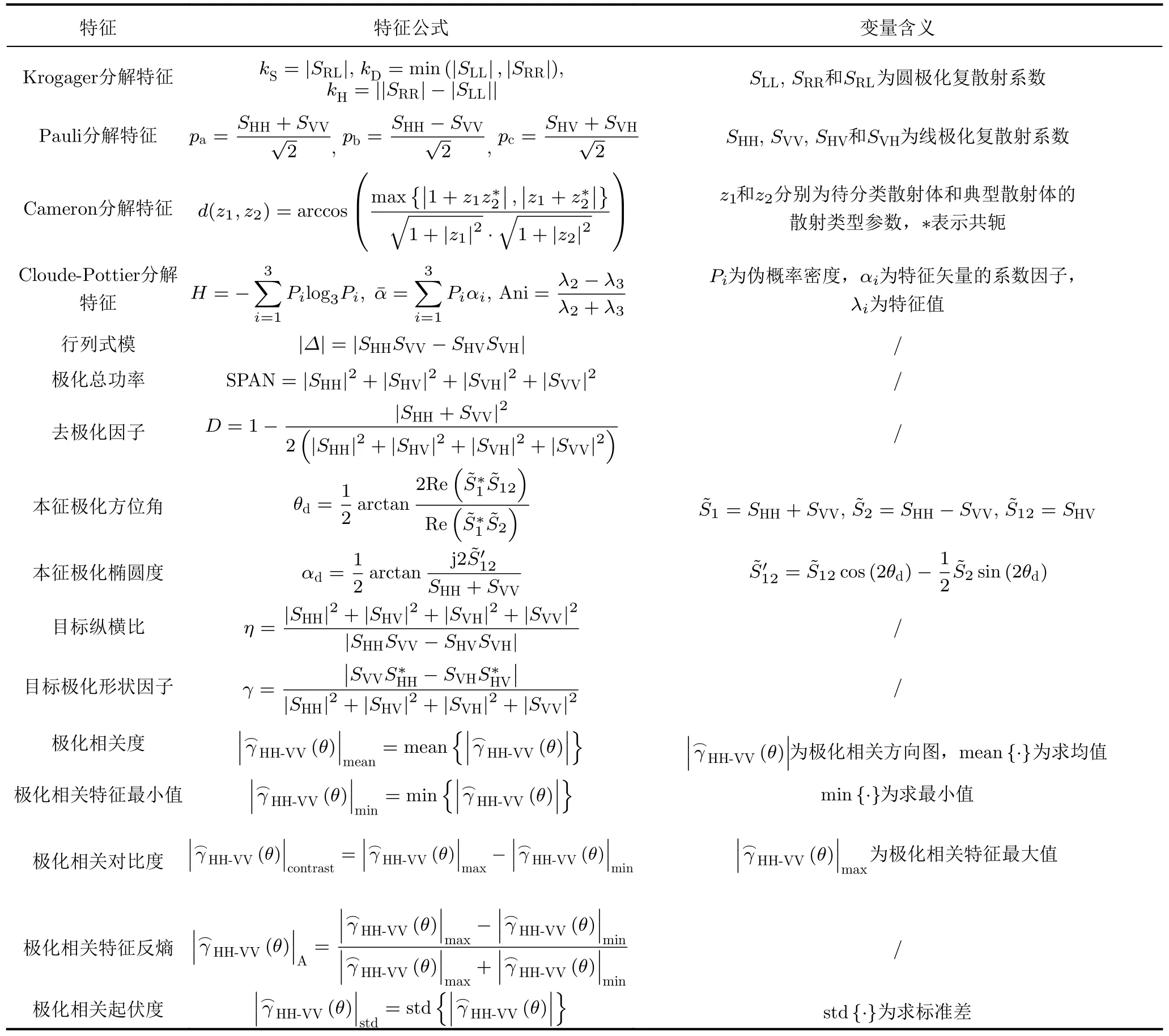
表2 用于角反射体雷达鉴别的极化特征归纳表Tab.2 Summary of polarimetric features for corner reflector radar identification
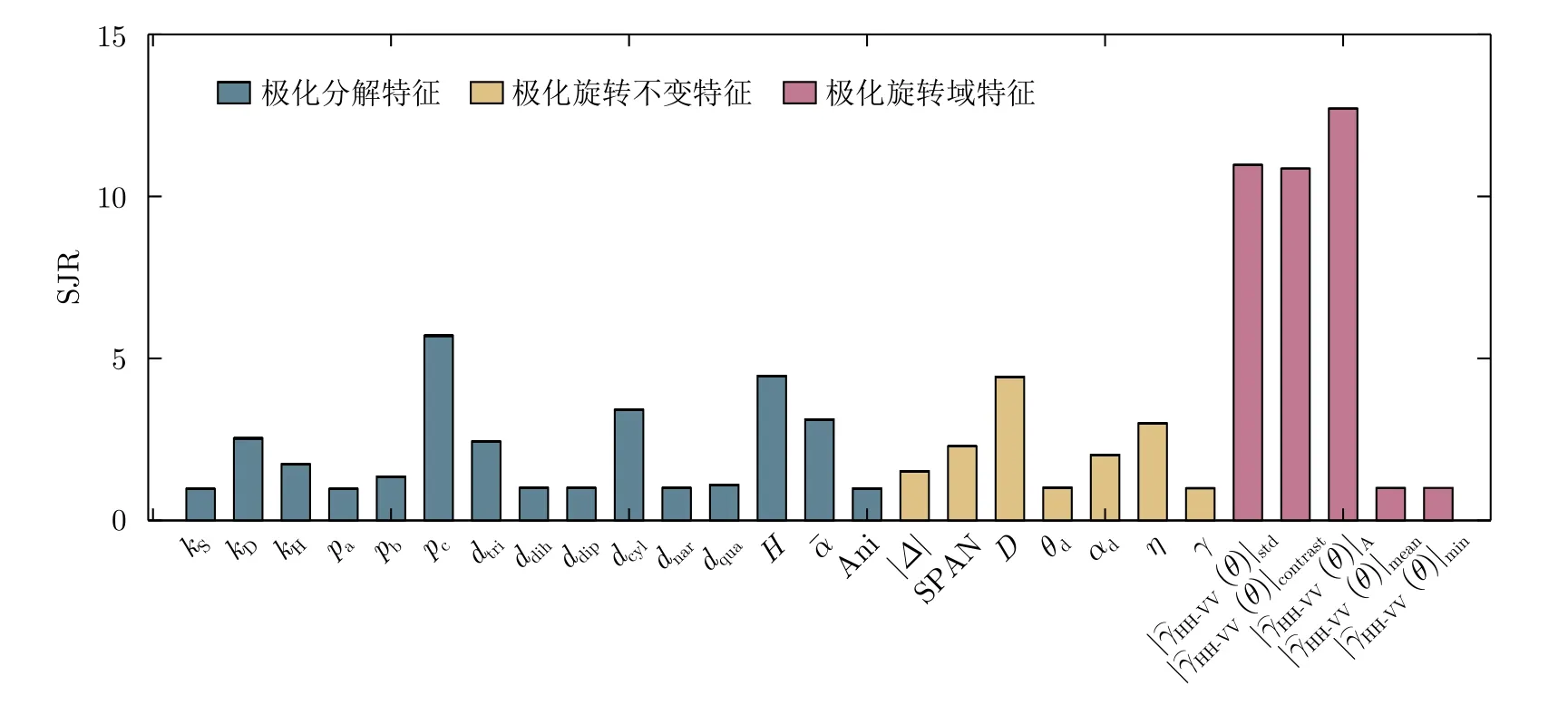
图21 舰船和角反射体的极化特征信干比Fig.21 SJR values of the polarimetric features of ships and corner reflectors
4.2 基于深度学习的角反射体鉴别方法
近年来,深度学习方法在光学目标检测和识别领域取得了巨大的成功,其核心是通过层次化的特征提取结构(即深层结构)来表征原始数据。相较于传统的人工特征提取方法,深度学习方法具有自动特征提取和深度数据挖掘的优点,能够克服手动设计特征和分类器带来的局限性,同时在目标分类和识别任务中能够获得更高的精度[124-126]。研究人员也将深度学习推广应用于角反射体干扰雷达鉴别研究。文献[127]提出了一种适用于浮空式角反射体识别的深度神经网络(Deep Neural Network,DNN)优化模型,采用mini-batch梯度下降法和Adam优化算法分别提高模型训练效率和降低异常样本子集的干扰,同时引入L2正则化和随机Dropout方法提高网络在验证集上的泛化能力,鉴别效果明显。文献[128]针对实时性和稳定性要求较高的角反射体干扰鉴别场景,提出一种基于极限学习机(Extreme Learning Machine,ELM)的角反射体干扰鉴别方法,通过挖掘目标HRRP的隐含相关性从而克服方位敏感问题。相较于深度置信网络(Deep Belief Network,DBN)和SVM分类器,该方法能够获得更好的鉴别性能,对比结果如图22所示。

图22 不同分类器与ELM的对比结果[128]Fig.22 Comparison results between different classifiers and ELM[128]
除此之外,理论研究表明,分类器联合能够提高基分类器的泛化能力,由精确且互补的分类器组成的集成分类器将优于性能最好的基分类器[10]。文献[106]采用加权平均法联合极限梯度提升(eXtreme Gradient Boosting,XGB)分类器和长短期记忆(Long Short-Term Memory,LSTM)分类器。这种结合方式避免了单一算法陷入局部最小值,从而获得较高的角反射体鉴别率。文献[85]通过集成学习的思想,提出了一种异构分类器联合的角反射体目标雷达识别方法,利用LM-BP (Levenberg Marquardt-Back Propagation)神经网络作为联合器对基分类器的输出进行融合。为了进一步提高目标识别的泛化能力,文献[129]利用元学习(META-Learning)取代传统的分类器融合策略,对基分类器的结果进行“再学习”,从而使元分类器的分类精度优于所有基分类器。集成间隔与基分类器的多样性密切相关,传统集成间隔往往忽视了样本权值、分类器权值等影响集成性能的重要因素。针对这一问题,文献[130]提出一种基于集成间隔优化的静态选择集成算法(Static Selection Ensemble based on Margin Optimization,SSE-MO)用于角反射体鉴别。为了进一步提高复杂干扰环境下对海雷达目标识别的泛化性和实时性,文献[131]提出一种基于聚类和随机参考分类器(K-Medoids Random Reference Classifier,KMRRC)的角反射体目标雷达识别算法。但是原始基分类器数目较多且个体精度良莠不齐,往往会影响KMRRC算法的效率和性能。针对这一问题,文献[10]提出一种综合静态优化和动态选择的混合分类器集成选择算法(Optimization and Dynamic Selection,ODS)。图23给出了上述4种集成算法对于6种舰船和角反射体阵列仿真数据的分类结果,可以看出ODS方法鉴别性能最好。然而,有限的学习样本和难解释性严重制约着深度学习方法的实际应用。结合目标散射机理解译和极化特征挖掘的专家知识驱动网络模型优化,构建物理可解释深度学习是提高泛化性的可行途径[114]。文献[132]利用Pauli极化分解特征驱动BP神经网络,从而达到了较好的角反射体干扰鉴别性能。
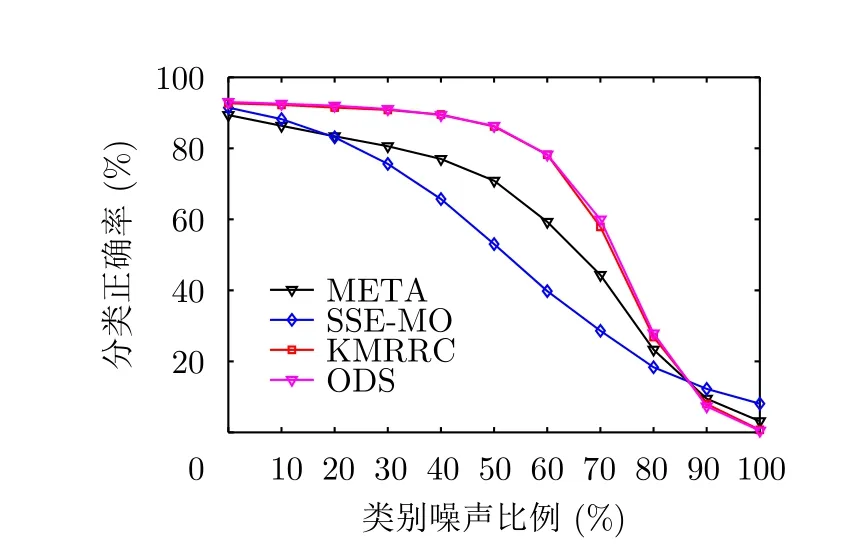
图23 4种集成算法分类结果对比[10]Fig.23 Comparison of classification results from four ensemble algorithms[10]
4.3 其他方法
除上述主流方法外,研究人员还利用新体制雷达或战术策略开展角反射体干扰雷达鉴别研究。文献[133]基于认知雷达的思想提出了雷达波形分集抗角反射体干扰的方法。其核心思想是通过脉内混合调制实现雷达波形在时间上的分集,并利用信息距离最大化的准则选择能够最大限度区分舰船目标与角反射体的波形,从而实现抗角反射体干扰的目的。多体制复合制导是当前精确制导技术发展的重要方向之一,复合制导能够充分利用多种制导模式的优点,实现对目标的精确捕获和跟踪[134,135]。由于舰船上存在电子装备和动力系统等热辐射源,而角反射体作为无源干扰,一般没有热辐射特征,因此基于该特点可利用雷达/红外双模制导技术对抗角反射体干扰[16,136,137]。此外,还可采用包括多平台多弹齐射、多种反舰导弹齐射和真假导弹次序攻击等战术策略,提升反舰导弹的角反射体鉴别能力[4,16,138]。
本节详细梳理了角反射体雷达鉴别方法的技术途径及存在的问题,为了便于不同鉴别方法的比较,表3总结了各类方法的适用场景和优缺点。
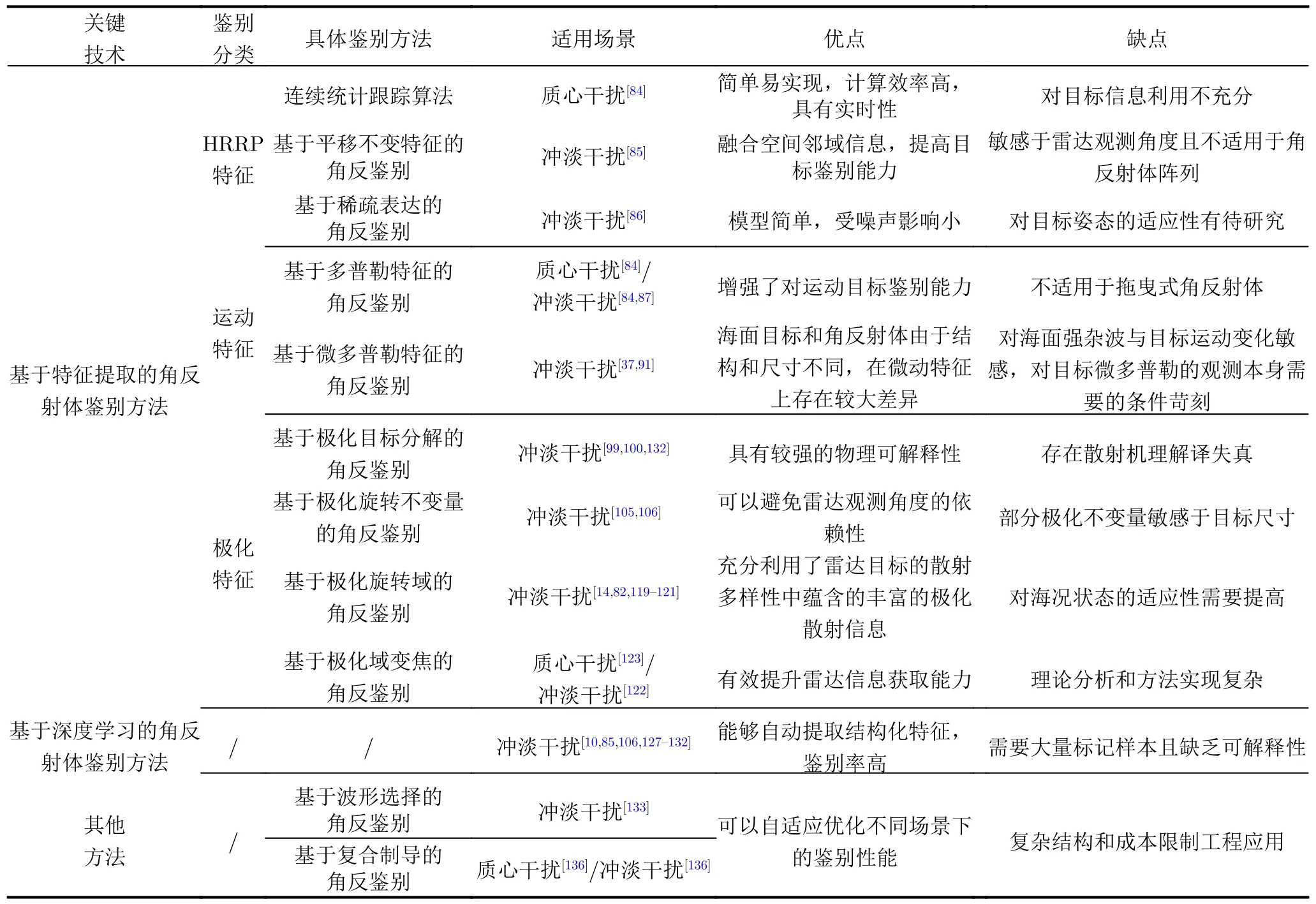
表3 角反射体雷达鉴别方法适用场景和优缺点总结Tab.3 Applicable scenarios and pros &cons summary of corner reflector radar identification
5 海面角反射体雷达鉴别研究展望
近年来,随着海战场日趋复杂的电磁环境,如何实现角反射体的高效鉴别仍是一大挑战。面向海战场射频制导攻击重大需求,以下方面仍需展开深入研究:
(1) 复杂场景下角反射体电磁散射特性研究
在实际应用场景中,充气式角反射体漂浮于随机时变的海面上,海洋表面包括毛细波、折浪、碎浪、泡沫等精细结构。海浪复杂多变的几何形态及其与电磁波的复杂相互作用机理是当前复合电磁散射建模需要解决的重要难题。此外,充气式角反射体是由复合材料、介质材料和金属涂层等组成,需要构建高置信目标电磁模型,研究不同材料和结构对电磁散射特性的影响。同时还需考虑舰载/舷外有源诱饵、箔条等多种干扰的影响,为以战场态势感知为特点的角反射体对抗策略提供理论基础。
(2) 角反射体实验研究与数据集构建
角反射体雷达数据资料的匮乏是制约角反射体雷达鉴别技术发展的重要原因。相比暗室缩比测量和电磁计算仿真,外场测量是获取目标电磁散射特性手段更直接、数据更真实的途径。但是由于实验测量成本昂贵、数据获取难度高,目前针对角反射体干扰与复杂海上环境的复合电磁散射的外场测量实验相对较少。因此,开展外场实验方案设计获取实验数据,并结合电磁计算仿真,构建实测数据与仿真数据的融合数据库,能够有效支撑角反射体干扰雷达鉴别技术的理论发展和应用验证。
(3) 角反射体高辨识度特征提取
雷达回波中蕴含着目标丰富的散射信息,利用时域、频域、空域及极化域等不同变化域和不同层面的目标散射信息,能够深入揭示角反射体电磁散射特性及演化规律,提取和设计适用于角反射体鉴别的高辨识度特征。此外,有限维度的信息难以反映目标真实的散射信息,应结合特征优选构建深层次多域多维特征集,增强干扰与目标在特征空间中的可分性,实现角反射体的准确鉴别。
(4) 角反射体鉴别与人工智能
随着深度学习技术的日趋成熟,结合深度学习技术可为角反射体的智能识别提供可行途径。然而受限于有效样本的数目和样本集构建的昂贵代价,在光学领域获得成功应用的深度学习模型难以直接应用于成像雷达领域。如何在训练样本有限的情况下,利用深度学习对角反射体进行智能识别,同时保持良好的泛化性能,是目前面临的一个重要挑战。传统的目标电磁散射机理解译方法具有清晰的物理可解释性。结合目标散射精细化解译专家知识,开展融合物理模型机理的深度学习模型设计,有望为小样本条件下雷达目标分类识别提供可行途径,具有重要的科学和应用价值。
(5) 新型角反射体与雷达鉴别
常规角反射体一旦加工完成,其电磁特性就很难改变,且反射性能依赖于入射波长,因此干扰效果受到限制。随着电子技术的发展,精确制导武器的突防能力和打击精度不断提升。为制约导弹作战功效发挥,角反射体在结构[139-142]和材料[143-147]等方面也在不断创新和发展,特性灵活可调的新型角反射体是未来角反射体装备的发展趋势。与此同时,也将涌现出诸如新型角反射体的特性与应用、新型角反射体雷达对抗技术等许多新的值得深入探索的前沿性、基础性科学问题,需要开展更深入的理论创新和实验研究。
